Turing Machines for Dummies
advertisement

Turing Machines for Dummies
Why representations do matter
Peter van Emde Boas
ILLC-FNWI-Univ. Of Amsterdam
Bronstee.com Software & Services B.V.
SOFSEM 2012 – Jan 25 2012
Špindlerúv Mlýn
Czech Republic
1
2
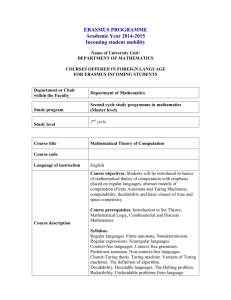
Turing Machine
Tape
K: States
: tape
symbols
Read/Write
head
Finite
Program : P
P (K ) (K {L,0,R}) :
(q,s,q’,s’,m) P denotes the instruction:
When reading s in state q print s’, perform
move m and proceed to state q’ .
Nondeterminism!
3
Transitions
Configuration c : finite string in *(K) *
$ A B A A C <q,A> C B B A $
Transition c --> c’ obtained by performing
instruction in P
E.G., the instruction <q,A,r,B,R>
$ A B A A C <q,A> C B B A $ |-$ A B A A C B <r,C> B B A $
Computation: sequence of transitions
4
Configurations
Three ingredients are required for describing a Configuration:
The Machine State : q
The contents of the tape (preferably with endmarkers) :
$ ABAAC B C B BA$
The position of the reading head : i
Available options
Mathematical Representation:
< q , xj xj+1 …. xi …. xl-1 xl , i
>
Intrinsic Representation:
$ xj xj+1 …. q xi …. xl-1 xl $ or $ xj xj+1 …. <q xi > …. xl-1 xl $
↓
Semi Intrinsic:
< q , $ xj xj+1 …. xi …. xl-1 xl $ >
5
6
Theme of this presentation
• The Convenience of the Intrinsic Representation
– Its History : who invented it, who saw its usefulness ?
– Applications which are hard, if not impossible when the
Mathematical representation is used
•
•
•
•
Chomsky Hierarchy and Automata models
Master reductions for NP: Cook-Levin and Tilings
Stockmeyer on Regular Expressions
Parallel Computation Thesis : the Second Machine Class
– Is there a real problem ?
7
HISTORY
Turing Machine and their Use
8
The teachings of our Master
Our textbooks present Turing Machine
programs in the format of quintuples or
quadruples.
What format did Turing use himself ?
Some fragments of the 1936 paper
Looks like quintuples….
Configuration means state in our terminology
9
For Turing Composite
transitions are allowed
10
This is an example of the Intrinsic Representation
Complete Configuration means Configuration on our terminology
11
A Macro language for Turing Machine programs
12
This Macro Language supports
Recursion !
13
The format of TM programs
which today is conventional
arises as a simplification
introduced for the purpose
of constructing the
Universal Turing Machine
Turing operates as an Engineer
(Programmer) rather than a
Mathematician / Logician
14
Nondeterminism
• Our concept of Nondeterminism (the
applicable instruction is not
necessarily unique) is for Turing a
serious programming error
• Nondeterminism became accepted in
the late 1950-ies as a consequence of
the needs of Automata Theory
15
Using the model
•
•
Initial configuration on some input
Final configuration
– No available instruction
– By final state (accept , reject)
– Evaporation of the state
•
Complete Computation
– From initial to final configuration (or infinity)
•
Result of computation
– Language recognition (always halting, condition on final
configuration)
– Language acceptance (accept by termination)
– Function evaluation (partial function/relation, requires termination)
•
Non Terminating Computations
– Stream Computing
– Interactive computation
16
Example Turing Machine
K = {q,r,_}
S = {0,1,B}
P = { (q,0,q,0,R),
(q,1,q,1,R),
(q,B,r,B,L),
(r,0,_,1,0),
(r,1,r,0,L),
(r,B,_,1,0) }
q0 1 0 1 1 B
0 q1 0 1 1 B
0 1 q0 1 1 B
0 1 0 q1 1 B
0 1 0 1 q1 B
0 1 0 1 1 qB
0 1 0 1 r1 B
0 1 0 r1 0 B
0 1 r0 0 0 B
0 1 1 0 0 B
Successor Machine;
Increments a number in binary.
_ represents the empty halting state. 11 + 1 = 12
17
Variants
Semi Infinite Tape
B
A
O O
B
B
A
B
O
B
A
A
B
B
O
A
B
B
O O
A
B
O
B
A
A
B
O
O
q
B
B
Tape folding; remember
which track you are on….
q
18
O
Multiple Tapes
B
A
O O
B
B
A
B
O
B
A
A
B
B
O
O
Z
Z
Z
Y
X
X
Y
Z
q
Z
X
Z
U
U
U
X
Y
19
Multiple Tapes
B
A
O O
B
B
A
B
O
B
A
A
B
B
O
O
Z
X
Z
U
U
U
X
Y
Z
Z
Z
Y
X
X
Y
Z
q
Tapes become tracks on a single tape
Markers used for maintaining head positions on the tracks
20
Invariance Thesis
• Other variants
– Multi dimensional tapes
– Multi heads on a single tape
– Jumps to other head positions
• All models of Turing Machines are
equivalent
– up to polynomial overhead in time and
constant factor overhead in space
• First Machine Class
– Includes RAM / RASP model as well
21
How Turing Machines are used
• Marvelous TM algorithms do exist in the literature
– Hennie Stearns: oblivious k-tapes on two tapes
– Slisenko: Real-time Palindromes regognition and string
matching
– Vitányi: Real-time Oblivious multi-counter simulation
• The main use of TM’s is for proving negative
results (using reductions)
– Undecidability
– NP-hardness
– Other hardness results
• Requires direct encoding of TM-computations in
target formalisms: Master Reductions
22
Time-Space Diagram
q0 1 0 1 1 B
0 q1 0 1 1 B
0 1 q0 1 1 B
0 1 0 q1 1 B
0 1 0 1 q1 B
0 1 0 1 1 qB
0 1 0 1 r1 B
0 1 0 r1 0 B
0 1 r0 0 0 B
0 1 1 0 0 B
Master Reductions use this
Time-Space Diagram as
representation of the computation
subject to the Reduction
The Intrinsic Representation is
far more useful, if not required,
for constructing these
Master Reductions
WHY ??
Because validity of the Diagram
can be checked Locally
23
Time for a new hero
© Peter van Emde Boas ; 19781016
Larry Stockmeyer
Thesis MIT 1974
Rep. MAC-TR-133
FOCS 1978, Ann Arbor
24
Stockmeyer on representations
This is a Mathematical Representation
25
Stockmeyer on representations
For the Single Tape model the Intrinsic Representation is used
26
Stockmeyer’s Lemma
Validiy of transition becomes a local check on a 2 by 3 window
in the Time-Space Diagram
NB: for Stockmeyer Functions are partial and multi-valued, I.E., Relations
Is this the first time the convenience of the Intrinsic Representation is mentioned explicitly ?
27
Applications
• Automata Theory
• Master reductions for NP
– Cook/Levin reduction to SAT
– Bounded Tiling
• Stockmeyer on Regular Expressions
• Parallel Computation Thesis
28
Automata Theory
• The Machine based characterization of the
Chomsky Hierarchy
– Regular grammars Finite Automata
– Context Free grammars Push Down
Automata
– Context Sensitive grammars Linear
Bounded Automata
– Unrestricted grammars Turing Machines
29
A Side Remark
Traditional Textbooks present Automata Theory in the order:
REG , CF, CSL, Type 0 resp. FA, PDA, LBA, TM
Alternative: start with Turing Machines, treating the alternative
models as restricted models
Advantage: the concepts involving Configurations and Computations
don’t need a separate presentation for each model
The desired characterizations are obtained by correlating
production steps in the grammar world and computation segments
in the Machine world, observing the required restrictions on both sides
30
A trivial Observation
• The production proces in the
Grammar world can be simulated by
a single Tape Turing Machine
• Turing Machines are after all perfect
symbol manipulators
• Remains to show that restricted
grammar classes can be simulated
by restricted Machine models
31
The Converse Direction
• Using the Intrinsic Representation,
the transitions of a Turing Machine
are described by Context Sensitive
Rules:
<q,a> <p,b,R>
<q,a> <p,b,0>
<q,a> <p,b,L>
corresponds to qaX bpX
corresponds to qa pb
corresponds to Xqa pXb
etcetera
32
The context
• In the grammar world a production starts
with the start symbol S, and terminates in
a string of terminals
• In the machine world a computation starts
with an initial ID with the terminal string
on the input tape, and ends in an
accepting configuration
• Hence: Mutual Simulations require some
adaptations……
33
TM simulation of a type 0 grammar
In the initial Configuration the TM writes the start symbol S
in a second track of the tape.
The productions in the grammar are stepwise simulated in
this second track (shifting the symbols left/right of the rewritten
ones over the required distance)
When the production is completed the TM checks whether the
two tracks contain the same string, and accepts accordingly
Hence: the language generated by a type 0 grammar can be
recognized by a Turing Machine
34
A type 0 grammar simulates a TM
From S generate the Initial Configuration in two tracks
(this can be done using Regular productions only)
Simulate the TM computation using the CS rules in the first
track, leaving the symbols in the second track invariant
If the machine accepts, erase the entire first track
(this may require lenght reducing rules, hence type 0….)
Hence: The language accepted by a Turing Machine can be
produced by a Type 0 grammar.
35
CS grammars and LBA
• The same proof idea works
• LBA simulates CS grammar: no
intermediate string exceeds the given
input in lenght
• CS grammar simulates LBA: in previous
proof erasing rules are only needed to
remove extra workspace on the tape, and
the LBA doesn’t use extra workspace
• Beware for the endmarkers: better have
them printed as markers on the first and
last input symbol….
36
CF grammars and PDA
• Snag: the PDA is a two tape device
• Solution: code configurations as
<processed input segment><state><reversed stack>
• Yields correspondence between
leftmost derivation and PDA
computations
37
Syntax tree
Left Derivation:
S
B
A
A
x
B
A
y
C
C
z
*S
*AB
*ACB
x*CB
xz*B
xz*BA
xzy*A
xzy*C
xzyz*
PDA Instructions:
*,λ,S *,AB
*,λ,A *,AC
*,λ,B *,BA
*,λ,A *,C
*,x,A *, λ
*,y,B *, λ
*,z,S *, λ
z
CF Rules:
S AB , A AC , B BA, A C,
A x , B y, C z
The Left derivation is equal
to the time-space diagram
of the PDA computation
Hence: a single state PDA can accept what the CF grammar produces
38
PDA and CFG
• A single state PDA can simulate a CFG
• The PDA accepts by empty stack
• If the PDA has several states the CFG
rules must encode these states
PDA Instructions:
CF Rules:
q,λ,S r,AB
r,λ,A s,AC
q,λ,A s,C
r,x,A s, λ
[qSα] [rAβ][βBα]
[rAα] [sAβ][βCα]
[qAα] [sCα]
[qAs] x
α , β , range
over the state
symbols
[rAr] means “in state r, with A on top of the stack, a computation
starts after which in state s the symbol below A is exposed”
39
Regular Grammars and Finite Automata
The standard translation: q,a r
instruction
q ar
production rule
Machine configuration and partial derivation
abbaqacbac
abbaq
For the computation the input already processed is irrelevant;
all information resides in the state, and the unread input
determines the computation.
In the grammar the past symbols are produced and the future
symbols are invisible.
A matter of perspective: past vs. future
40
Master reductions for NP
• Cook-Levin reduction to SAT
– Based on Mathematical representation
– Based on Intrinsic representation
• What is the difference ?
• Tiling based reduction
– Does it require an Intrinsic
representation ?
41
Time-Space Diagram
q0 1 0 1 1 B
0 q1 0 1 1 B
0 1 q0 1 1 B
0 1 0 q1 1 B
0 1 0 1 q1 B
0 1 0 1 1 qB
0 1 0 1 r1 B
0 1 0 r1 0 B
0 1 r0 0 0 B
0 1 1 0 0 B
Intrinsic
0
0
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
0
0
1
1
1
1
1
1
1
0
0
0
B
B
B
B
B
B
B
B
B
B
Mathematical
42
q
q
q
q
q
q
r
r
r
-
0
1
2
3
4
5
4
3
2
2
Reduction to SAT (intrinsic)
The key idea is to introduce a family of propositional variables:
P[i,j,a] expressing at row i (time i) on position j (space j) the
symbol a is written in the diagram
Conditions:
I
at every position some symbol is written
II
at no position more than one symbol is written
III
the diagram starts with the initial configuration on the input
IV
the diagram terminates with an accepting configuration
V
the transitions follow the Turing Machine program
Va : expressed using implications (beware for Nondeterminism)
Vb : expressed by exclusion of illegal transitions
43
Reduction to SAT (mathematical)
The key idea is to introduce a family of propositional variables:
P[i,j,a] expressing at row i (time i) on position j (space j) the
symbol a is written in the diagram
Q[i,q] expressing at time i the machine is in state q
M[i,j] expressing at time i the head is in position j
Extra Conditions:
VI
at every time the machine is in some state
VII
at no time the machine is in more than one state
VIII
at every time the head is in some position
IX
at no time the head is in more than one position
The correctness conditions III , IV and V are rephrased,
somewhat easier to understand….
44
What’s the difference ??
Assume that a computation of T steps is described, hence the
height (but also the width) of the diagram is O(T)
Assume that the number of symbols used is K
K = O( # states * # tape symbols )
Investigate the size of the required propositional formulas.
Investigate whether these formulas are expressed as clauses.
45
Expressing the Conditions
Conditions:
I
at every position some symbol is written
II
at no position more than one symbol is written
III
the diagram starts with the initial configuration
on the input
IV
the diagram terminates with an accepting
configuration
V
the transitions follow the Turing Machine program
Va : expressed using implications
Vb : expressed by exclusion of illegal transitions
VI
at every time the machine is in some state
VII
at no time the machine is in more than one state
VIII
at every time the head is in some position
IX
at no time the head is in more than one position
All conditions (except Va) are easily expressed by clauses
46
O(T2K)
O(T2K2)
O(T)
O(1)
O(T2K2)
O(T2K6)
O(TK)
O(TK2)
O(T2)
O(T3)
Conclusion
• The standard proof (EG., Garey &
Johnson) uses the Mathematical
representation, yielding a cubic formula
size blow-up
• However, a quadratic formula size blow-up
is achievable when using the intrinsic
representation
• Same overhead is obtained when taking
the detour by the tiling based reduction
(next)
47
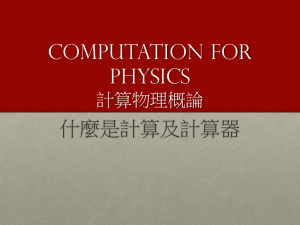
Tiling based Reduction
Tile Type: square divided in 4
coloured triangles.
Infinite stock available
No rotations or reflections allowed
Tiling: Covering of region of the
plane such that adjacent tiles have
matching colours
Boundary condition: colours given along
(part of) edge of region, or some given
tile at some given position.
48
Turing Machines and Tilings
Idea: tile a region and let successive
color sequences along rows correspond to
successive configurations.....
s
s
qs
s
s
symbol
passing
tile
q
q’
q’s’
s’
(q,s,q’,s’,0)
(q,s,q’,s’,R)
q
qs
qs
qs
state
accepting
tiles
qs
q’
s’
instruction
step
tiles
(q,s,q’,s’,L)
SNAG: Pairs of phantom heads appearing out of nowhere...
Solution: Right and Left Moving States....
49
Example Turing Machine
K = {q,r,_}
S = {0,1,B}
P = { (q,0,q,0,R),
(q,1,q,1,R),
(q,B,r,B,L),
(r,0,_,1,0),
(r,1,r,0,L),
(r,B,_,1,0) }
Successor Machine;
adds 1 to a binary integer.
_ denotes empty halt state.
q0 1 0 1 1 B
0 q1 0 1 1 B
0 1 q0 1 1 B
0 1 0 q1 1 B
0 1 0 1 q1 B
0 1 0 1 1 qB
0 1 0 1 r1 B
0 1 0 r1 0 B
0 1 r0 0 0 B
0 1 1 0 0 B
11 + 1 = 12
50
Reduction to Tilings
q0 1 0 1 1 B
0 q1 0 1 1 B
0 1 q0 1 1 B
0 1 0 q1 1 B
0 1 0 1 q1 B
0 1 0 1 1 qB
0 1 0 1 r1 B
0 1 0 r1 0 B
0 1 r0 0 0 B
0 1 1 0 0 B
© Peter van Emde Boas ; 19921029
51
Implementation in Hardware
© Peter van Emde Boas ; 19950310
© Peter van Emde Boas ; 19950310
© Peter van Emde Boas ; 19921031
htpp://www.squaringthecircles.com/turingtiles
52
Tiling reductions
space
initial configuration
Program : Tile Types
Input: Boundary
condition
Space: Width region
Time: Height region
blank
border
time
blank
border
accepting configuration/
by construction unique
53
Tiling Problems
Square Tiling: Tiling a given square with
boundary condition: Complete for NP.
Corridor Tiling: Tiling a rectangle with
boundary conditions on entrance and exit
(length is undetermined):
Complete for PSPACE .
Origin Constrained Tiling: Tiling the entire plane
with a given Tile at the Origin.
Complete for co-RE hence Undecidable
Tiling: Tiling the entire plain without constraints.
Still Complete for co-RE
(Wang/Berger’s Theorem). Hard to Prove!
54
Detour to SAT
A reduction from Bounded Tiling to SAT requires propositional
variables t[i,j,s] expressing at position (i,j) a tile of type s is
placed
Conditions:
I
Everywhere some tile is placed
II
Nowhere more than one tile is placed
III
Boundary conditions are observed
IV
Adjacency conditions are observed
O(T2K)
O(T2K2)
O(TK)
O(T2K2)
T height and width of the tiled region
K number of tile types
All conditions are expressed as clauses
55
Is the intrinsic representation needed ?
• A tiling reduction is posible for the
semi-intrinsic representation (state
information can be transmitted
through rows…)
• Translating numeric information into
geometric info (without introducing a
semi-intrinsic representation) seems
hard if not impossible…
56
Stockmeyer on Regular
Expressions
Thesis MIT 1974
Rep. MAC-TR-133
57
Regular Expressions
S finite alphabet (in our applications Σ U (K ˟ Σ) U { $ } )
REG(S) :
0 REG(S)
1 REG(S)
a REG(S) for a S
M(0) = empty language
M(1) = {λ} singleton empty word
M(a) = {a} singleton letter a word
If f, g REG(S) then
f + g REG(S)
M(f + g) = M(f) U M(g) union
f.g REG(S)
M(f.g) = M(f).M(g) concatenation
f* REG(S)
M(f*) = M(f)* Kleene star
f* = 1 + f + f.f + f.f.f. + ….
Extra operations:
f2 = f.f
f∩g
M(f ∩ g) = M(f) ∩ M(g) intersection
~f
M(~ f) = S* \ M(f)
squaring
complementation
58
Regular Expressions
•
•
•
•
•
•
•
•
Describe the Regular languages over S
Transformation expression Finite automaton is easy (construction
where the parentheses in the expression become the states in the Finite
Automaton)
Converse transformation more difficult but standard textbook material
(induction over number of states)
Other interpretations exist and are useful: Regular Algebra’s, EG., in
programming logics (PDL)
Complete axiomatizations exist
No direct algebraic expressions for intersection and complementation
Regular languages being closed under intersection and
complementation implies that these operations are expressible in all
individual instances
Extra operators yield succinctness
59
Stockmeyer’s Decision Problems
NEC(f,S)
is M(f) a proper subset of S* ?
EQ(f,g)
INEQ(f,g)
is M(f) = M(g) ?
is M(f) ≠ M(g) ?
NEC(f,S) is equivalent to INEQ(f,S*)
EQ and INEQ are complementary problems
Stockmeyer (1974) characterizes the complexity of these
problems, depending on the set of available operators
Considering complementary problems was meaninful:
the Immerman-Szelepsényi result was discovered only 13
years later….
60
Stockmeyer’s Master Reduction
Given a TM program P and some input string ω, there doesn’t exist
a regular expression denoting the (linearizations of) accepting
time-space diagrams.
But Violations against representing such a diagram can be described
by regular expressions
Syllabus Errorum approach: construct a Regular expression which
enumerates all possible violations, and test whether there remains
a string not covered by this expression (NEC problem)
61
Syllabus Errorum
A correct time-space diagram consists of configurations, all
of equal lenght, separated by $ symbols
The first configuration must be the intitial configuration on the
given input
The last configuration must be accepting (the unique accepting)
configuration
The diagram may contain no illegal transitions
This condition is captured by the absense of forbidden 2 by 3
windows in the diagram, as expressed by Stockmeyer’s lemma;
For this method to work the Intrinsic representation seems essential.
62
Yardstick expressions
Alphabet S used: Σ U (K ˟ Σ) U { $ } ;
The width of the time space diagram (space consumed by the
computation) is denoted M .
Let V = Σ U (K ˟ Σ) , W = Σ
Given alphabet Z and number N we construct an regular expression
Ya(Z,N) representing strings of length N of symbols from Z
Note that Ya(1+Z,N) now represents strings of lenght ≤ N
Using these yardstick expressions the various sources of errors
can be described
63
Error Descriptions
There is a substring inbetween two $ symbols which is to short:
S*.$. Ya(1+V,M-1) .$.S*
There is a substring inbetween two $ symbols which is to long:
S*.$. Ya(V,M+1) .S*.$.S*
There is an incorrect transition in the diagram:
xyz
S*.xyz. Ya($+V,M-2) .uvw.S*
where u v w is a forbidden 2 by 3
window in the diagram
Similar (even more simple) expressions for the properties “starts
wrong” and “ends wrong”
64
The reduction
• The regular expression which is the sum of all
these error types represents the exact
complement of the set of time space diagrams of
accepting computations by P on input ω in
space M
• Denote this expression by ER(P, ω, M)
• Input is accepted iff NEC( ER(P, ω, M) , S)
• Remains to estimate the lenght of this expression
• Remember that we consider Nondeterministic
space bounded computations
65
The size of the yardstick expressions
• Without extra operators Ya(Z,N) is of
size O(N) yielding NPSPACE
hardness for NEC
• With squaring 2 Ya(Z,N) is of size
O(log(N)) yielding NEXPSPACE
hardness for NEC
66
Expressions without *
• The same method also works without
using * , but now the height of the
diagram (time) must be restricted
• Yields reductions showing NP hardness
and NEXPTIME hardness for the INEQ
problem (without or with squaring)
• Nonelementary hardness if
complementation is added
• Matching upper bounds are also obtained
67
Parallel Computation Thesis
// PTIME = // NPTIME = PSPACE
True for Computational Models which combine
Exponential Growth potential with
Uniform Behavior.
The Second
Machine Class
68
Representative examples
Sequential devices operating on huge objects
Vector machine
Pratt & Stockmeyer
74,76
MRAM
Hartmanis & Simon
74
MRAM without bit-logic
Bertoni, Mauri, Sabadini 81
EDITRAM
Stegwee, Torenvliet, VEB 85
ASMM
Tromp, VEB
90,93
Alternating TM (RAM)
Chandra, Stockmeyer & Kozen 81
Parallel Devices
Parallel TM
PRAM
SIMDAG
Aggregate
Array Proc. Machine
Savitch
Savitch & Stimson
Goldschlager
Goldschlager
v Leeuwen & Wiedermann
69
77
76,79
78,82
78,82
85
How to prove it
• Inclusion //NPTIME PSPACE :
– Guess computation trace
– Verify that it accepts by means of
recursive procedure
– Validate that the parameters are
polynomially bounded in size
– Uniformity of behavior is essential
70
How to prove it
• Inclusion PSPACE //PTIME :
– Today’s authors show that
QBF //PTIME
– Original proofs give direct simulations
of PSPACE computations, based on
techniques originating from the proof of
Savitch’ Theorem PSPACE = NPSPACE
71
Walter Savitch
© Peter van Emde Boas
© Peter van Emde Boas
Amsterdam; CWI, Aug 1976
© Peter van Emde Boas
San Diego, Oct 1983
Proved in 1970 PSPACE = NPSPACE
72
Understanding PSPACE
Acceptance = Reachability in Computation Graph
Solitaire Problem: finding an Accepting path in an Exponentially large,
but highly Regular Graph
Matrix Powering Algorithm: Parallelism
Recursive Procedure: Savitch Theorem
Logic: QBF, Alternation, Games
73
Polynomial Space Configuration
Graph
• Configurations & Transitions:
– (finite) State, Focus of Interaction &
Memory Contents
– Transitions are Local (involving State
and Memory locations in Focus only;
Focus may shift). Only a Finite number
of Transitions in a Configuration
– Input Space doesn´t count for Space
Measure
74
Polynomial Space Configuration
Graph
• Exponential Size Configuration Graph:
– input length: |x| = k ; Space bound: S(k)
– Number of States: q (constant)
– Number of Focus Locations: k.S(k)t
(where t denotes the number of “heads”)
– Number of Memory Contents: CS(k)
– Together: q.k.S(k)t. CS(k) = 2O(S(k))
(assuming S(k) = W(log(k)) )
75
Polynomial Space Configuration
Graph
• Uniqueness Initial & Final Accepting
Configuration:
– Before Accepting Erase Everything
– Return Focus to Starting Positions
– Halt in Unique Accepting State
Start
Goal
76
Path Finding in Configuration
Graph
77
Path Finding in Configuration
Graph
Cycles in accepting path are irrelevant
Trash Nodes: Unreachable:
or Useless
78
Unreasonable Algorithm
• Step 1: generate this Exponentially large
structure
• Step 2: Perform Exponentially long heavy
computation on this structure
• Step 3: Extract a single bit of information
from the result - the rest of the work is
wasted.
• : Akoue Pantwn, Eklege de ‘a sumfereis
• Which is just what the Parallel Models do.....
79
Unreasonable Algorithm
Transitive Closure of Adjacency Matrix by
Iterated squaring ==> // Models
Recursive approaches ==> // Models,
Savitch' Theorem &
Hardness QBF and Games
80
Adjacency Matrix
2
1
M :=
1
0
1
0
1
0
1
0
0
0
0
1
1
0
0
1
0
0
1
0
1
0
0
1
1
3
5
4
Matrix describes Presence of
Edges in Graph;
1 on diagonal: length zero paths
81
Adjacency Matrix
M2 =
1
1
1
1
1
0
1
0
0
0
0
1
1
0
0
1
0
1
1
1
1
1
0
1
1
1
3
5
In Boolean Matrix Algebra
M2 : Paths up to length 2
M4 : paths up to length 4
M4 =
1
1
1
1
1
2
4
0
1
0
0
0
0
1
1
0
0
1
1
1
1
1
1
1
1
1
1
2
1
3
5
82
4
Matrix Squaring
M[i,j] :=
( M[i,k]
M[k,j] )
k
On an N node graph, a single squaring requires
O(N3) operations
Log(N) squarings are required to compute N-th
Power of the Matrix
Remember that N = 2O(S)
83
Think Parallel
• O( N3 ) processors can compute these
squarings in time
– O( log(N)) if unbounded fan-in is allowed
– O( log(N)2 ) if fan-in is bounded
• This is the basis for recognizing PSPACE
in polynomial time on PRAM models
• More in Second Machine Class paper
and/or chapter in Handbook of TCS; (both
publications from the 1980-ies)
84
How to obtain this Matrix ?
The row/column index is a binary number
which codes a configuration.
This code must be efficient in order that it
is easy to recognize whether two configurations
are connected by a transition
"Locality" of the transitions is key: configuration
only changes at focus; everywhere else it
remains the same.
85
How to obtain this Matrix ?
The intrinsic representation for Turing Machine
has all desired properties.
We need some routine to extract from a binary
bitstring a group of bits coding a single symbol.
On a RAM model your values are numbers - not
bitstrings. Extracting these symbol codes
requires number-to-binary conversion, which
presupposes the availability of some
"multiplicative" instruction which lacks in the
standard model (but which is always granted).
86
The Problem ??!
Is there a dragon out there ??
© Games Workshop
87
What do actual authors Use ?
• Whenever TM computations are used
in master reductions, the author will
almost always chose either an
intrinsic or a semi intrinsic
representation
• This holds even if the formal
definition for configurations is based
on the mathematical representation
88
Representative authors
Author
Title
Mathematical
Reidel
Ency of Math
X
RI Soare
RE sets and
degrees 87
X
SC Kleene
Intro to
Metamath 52
X
Boolos & Jeffrey Computability
& Logic 74
Börger
Computability
89
Cohen
Computability
& Logic 87
M Davis
Computability
& Unsolv. 58
Intrinsic
Semi-Intrinsic
X
X
X
X
89
Representative authors
Author
Title
Mathematical
Hopcroft &
Ullman
Formal Lang
& Autom 69
X
Hopcroft &
Ullman
Formal Lang
& Autom 79
F Hennie
Intro to
Comput 77
Harrison
Intro Formal
Languages 78
Sudkamp
Intro TCS
06
Lewis &
Papadimitriou
Elts th of
comp 81
Mehlhorn
EATCS mon 2
84
Intrinsic
Semi-Intrinsic
X
illustration
X
X
Without states
X
X
earlier eds as well
X
X
for reductions
X
90
Representative authors
Author
Title
Mathematical
Intrinsic
Rudick &
Wigderson
Comp Compl
Theory 04
J Savage
Models of
Computation 98
Balcazar Diaz &
Gabarro
Structural
Complexity 88
X
H Rogers
Th Recursive
Functions 67
X
Odifreddi
Classical Rec
Theory 89
X
WJ Savitch
Abstr Mach &
Grammars 82
X
J Martin
Intr Lang & th
of comp 97
Semi-Intrinsic
X
X
For k tapes
X
X
X
91
We are Safe
• In practice, all authors on the basis
of their intuition use the intrinsic
representation
• Why then it seems that Stockmeyer
is the unique author who makes the
advantages explicit ??
92