PPTX Slides
advertisement

Dr A Sahu
Dept of Comp Sc & Engg.
IIT Guwahati
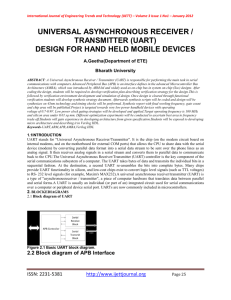
• I/O Port Addressing
• UART Port Basic
–16500 Standardized UART
• UART Programming in C
• Loop back program
• Standardized
• Use command
– $ cat /proc/ioports
0000-001f : dma1
0020-0021 : pic1
0040-0043 : timer0
0050-0053 : timer1
0060-0060 : keyboard
0064-0064 : keyboard
0070-0071 : rtc0
0080-008f : dma page reg
00a0-00a1 : pic2
00c0-00df : dma2
00f0-00ff : fpu
0170-0177 : 0000:00:14.1
0170-0177 : pata_atiixp
01f0-01f7 : 0000:00:14.1
01f0-01f7 : pata_atiixp
0200-020f : pnp 00:09
0220-0233 : pnp 00:09
0240-0253 : pnp 00:09
0260-0273 : pnp 00:09
0280-0293 : pnp 00:09
02f8-02ff : serial
0376-0376 : 0000:00:14.1
0376-0376 : pata_atiixp
0378-037a : parport0
0388-0389 : pnp 00:09
03c0-03df : vga+
03f6-03f6 : 0000:00:14.1
03f6-03f6 : pata_atiixp
03f8-03ff : serial
040b-040b : pnp 00:09
04d0-04d1 : pnp 00:09
• IO Privilege level
– Can be set by root
• If set user can RW to Ios
• Loopback user C/C++ program can access
Modem/UART at address 03F8
• Synchronous
– Sender and receiver must synchronize
• Done in hardware using phase locked loops (PLLs)
– Block of data can be sent
– More efficient : Less overhead than asynchronous
transmission
– Expensive
• Asynchronous
– Each byte is encoded for transmission
• Start and stop bits
– No need for sender and receiver synchronization
Transmission Gaps
Sender
a
Data
Data
Data
Receiver
Asynchronous transmission
CLK
Sender
Data
Data
Data
Data
Synchronous transmission
Data
Receiver
• Character oriented
• Each character carried start bit and stop bits
• When No data are being transmitted
– Receiver stay at logic 1 called mark, logic 0 is Space
• Framing:
– Transmission begins with one start bit (low/0)
– Followed by DATA (8bit) and
– Stop bits (1 or 2 bits of logic high)
Asynchronous transmission
1 start
bit
Source data
1
LSB
Start Bit
0
0
0
1
Time
8 bit Data
1
1
1 or 2 Stop
bit
0
MSB
Start Bits
• Your device-driver module (named ‘uart.c’) is
intended to allow unprivileged programs that
are running on a pair of adjacent PCs to
communicate via a “null-modem” cable
Transmitting…
$ echo Hello > /dev/uart
$_
Receiving…
$ cat /dev/uart
Hello _
• The UART has a transmission-engine, and also
a reception-engine, which are able to operate
simultaneously (i.e., “full-duplex”)
• Software controls the UART’s operations by
accessing several registers, using the x86
processor’s ‘in’ and ‘out’ instructions
• Linux provides some convenient ‘macros’ that
‘hide’ the x86 machine-code details
Device-driver LKM layout
function
function
function
fops
...
the usual pair of
module-administration
functions
module’s ‘payload’
is a collection of
callback-functions
having prescribed
prototypes
AND
a ‘package’ of
function-pointers
init
registers the ‘fops’
exit
unregisters the ‘fops’
• Our System Administrator has created the
device-file needed for your driver-module:
root# mknod /dev/uart c 84 0
root# chmod a+w /dev/uart
• Your driver-module needs to ‘register’ your
package of driver-methods (i.e., functions) in
its initialization routine (and ‘unregister’ them
later in its cleanup routine)
The Transmitter Holding Register (8-bits)
0
1
1
0
0
0
0
Software outputs a byte
of data to the THR
1
The bits are immediately
copied into an internal
‘shift’-register
The bits are shifted out,
one-at-a-time, in sync
with a clock-pulse
0
1
1
0
0
0
0
1
The transmitter’s internal ‘shift’ register
clock
clock-pulses
trigger bit-shifts
1-0-1-1-0-0-0-0-1-0
data-bits
stop
bit
start
bit
• Obviously your driver-module’s ‘payload’ will
have to include ‘methods’ (functions) which
perform the ‘write()’ and ‘read()’ operations
that applications will invoke
• You may decide your driver needs also to
implement certain additional ‘methods’
• A little history is helpful for understanding
some of the UART device’s terminology
input voltage
clock-pulses trigger
voltage-sampling
and bit-shifts
at regular intervals
1-0-1-1-0-0-0-0-1-0
data-bits
stop
bit
clock
The receiver’s internal ‘shift’ register
0
1
1
0
0
0
0
1
0
1
1
0
0
0
0
1
start
bit
Software can input
the received byte
from the RBR
The Receiver Buffer Register (8-bits)
D7-D0
RESET
CLK
C/Db
RDb
WRb
CSb
DSRb
DTRb
CTSb
RTSb
Data Bus
Buffer
R/W
Control
Logic
Modem
Control
I
n
t
e
r
n
a
l
L
i
n
e
Transmit
Buffer
TXD
Transmit
Control
TXRDY
TXE
TXC
Receive
Buffer
Receive
Control
RXD
RXRDY
RXC
SYBDET/BD
D0
D7
Data
Buffer
Register
I
n
t
e
r
n
a
l
D
a
t
a
B
u
s
Transmitter
Buffer
Register
Out put
Register
TxCb
Transmitter
Control Logic
Input
Register
Receiver
Buffer
Register
TxD
Receiver
Control Logic
TxRDY
TxE
RxD
RxCb
RxRDY
EH
IR
RTS
ER SBRK RxE DTR TxE
TxE: transmit enable (0/1 Enable Disable)
DTR: data terminal ready (1=ENABLE DTR)
RxE: receiver enable (1/0=EN/DISABLE)
SBPRK: send break character 1= force TxD low
ER: error reset (Reset Flags: Parity ,Over run,
Framing Error of Status Word)
RTS: request to send (1= Enable Request to send)
IR:
internal reset (Reset 8251 to mode)
EH: enter hunt mode (1=search for Sync Character)
DSR
SYN
DET
TxRDY
RxRDY
TxEMPTY
PE
OE
FE
SYNDET
DSR
FE
OE
Tx
PE
RxRDY TxRDY
EMPTY
transmit ready (DB Buffer is empty)
receiver ready
transmitter empty
parity error (1=when PE detected)
overrun error
framing error (Aynsc only, Valid stop bit
not detected)
sync. character detected
data set ready (DSR set at 0 level)
Base+0
Divisor Latch Register
Base+0
Transmit Data Register
8-bits (Write-only)
Base+0
Received Data Register
8-bits (Read-only)
Base+1
Interrupt Enable Register
Base+2
Interrupt Identification Register
8-bits (Read-only)
Base+2
FIFO Control Register
8-bits (Write-only)
Base+3
Line Control Register
8-bits (Read/Write)
Base+4
Modem Control Register
8-bits (Read/Write)
Base+5
Line Status Register
8-bits (Read-only)
Base+6
Modem Status Register
8-bits (Read-only)
Base+7
Scratch Pad Register
8-bits (Read/Write)
8-bits (Read/Write)
16-bits (R/W)
• The standard UART clock-frequency for PCs
equals 1,843,200 cycles-per-second
• Each data-bit consumes 16 clock-cycles
• So the fastest serial bit-rate in PCs would be
1843200/16 = 115200 bits-per-second
• With one ‘start’ bit and one ‘stop’ bit, ten bits
are required for each ‘byte’ of data
• Rate is too fast for ‘teletype’ terminals
• The ‘Divisor Latch’ may be used to slow down
the UART’s rate of data-transfer
• Clock-frequency gets divided by the value
programmed in the ‘Divisor Latch’ register
• Older terminals often were operated at a
‘baud rate’ of 300 bits-per-second (which
translates into 30 characters-per-second)
• So Divisor-Latch set to 0x0180
Transmitter clock (bit-rate times 16)
DATA
OUT
start-bit
data-bit 0
24 clock-cycles
data-bit 1
16 clock-cycles
sample
Receiver clock (bit-rate times 16)
receiver detects this high-to-low transition,
so it waits 24 clock-cycles,
then samples the data-line’s voltage
every 16 clock-cycles afterward
…
16 clock-cycles
sample
The PC uses eight consecutive I/O-ports to access
the UART’s registers
0x03F8
RxD/TxD
0x03F9
0x03FA
0x03FB
0x03FC
0s03FD
IER
IIR/FCR
LCR
MCR
LSR
0x03FE
0x03FF
MSR
SCR
interrupt
line
modem
enable
status status
register
register register
receive buffer register and
line
modem
scratchpad
transmitter holding
control control
register
register
register register
(also Divisor Latch register)
interrupt identification
register and FIFO control
register
7
0
6
5
0
0
4
LOOP
BACK
3
2
OUT2
OUT1
1
RTS
0
DTR
Legend:
DTR = Data Terminal Ready (1=yes, 0=no)
RTS = Request To Send (1=yes, 0=no)
OUT1 = not used (except in loopback mode)
OUT2 = enables the UART to issue interrupts
LOOPBACK-mode (1=enabled, 0=disabled)
7
6
DCD
RI
5
DSR
4
3
CTS
delta
DCD
2
delta
RI
1
delta
DSR
0
delta
CTS
set if the corresponding bit has
changed since the last time this
register was read
Legend:
[---- loopback-mode ----]
CTS = Clear To Send (1=yes, 0=no)
[bit 0 in Modem Control]
DSR = Data Set Ready (1=yes, 0=no) [bit 1 in Modem Control]
RI = Ring Indicator (1=yes,0=no)
[bit 2 in Modem Control]
DCD = Data Carrier Detected (1=yes,0=no)
[bit 3 in Modem Control]
7
6
Error in TXmitter
idle
Rx FIFO
5
4
3
THR
Break Framing
empty interrupt error
2
1
0
Parity
error
Overrun
error
Received
Data
Ready
These status-bits indicate errors in the received data
This status-bit
indicates that the
data-transmission
has been completed
This status-bit indicates that
the Transmitter Holding Register
is ready to accept a new data byte
This status-bit indicates that a new byte of data has arrived
(or, in FIFO-mode, that the receiver-FIFO has reached its threshold)
7
6
Divisor
set
Latch
break
access
5
stick
parity
0 = normal
1 = ‘break’
0 = not accessible
1 = assessible
4
3
2
even
number
parity
parity
of stop
enable
select
bits
1
word length
selection
00 = 5 bits
01 = 6 bits
10 = 7 bits
11 = 8 bits
0 = 1 stop bit
1 = 2 stop bits
0 = no parity bits
1 = one parity bit
1 = even parity
0 = ‘odd’ parity
0
7
6
0
5
0
0
4
0
3
2
1
0
Modem Rx Line THR Received
Status Status
is
data is
change change empty available
If enabled (by setting the bit to 1),
the UART will generate an interrupt:
(bit 3) whenever modem status changes
(bit 2) whenever a receive-error is detected
(bit 1) whenever the transmit-buffer is empty
(bit 0) whenever the receive-buffer is nonempty
Also, in FIFO mode, a ‘timeout’ interrupt will be generated if neither
FIFO has been ‘serviced’ for at least four character-clock times
7
6
RCVR FIFO
trigger-level
00 = 1 byte
01 = 4 bytes
10 = 8 bytes
11 = 14 bytes
5
4
reserved reserved
3
DMA
Mode
select
2
XMIT
FIFO
reset
1
RCVR
FIFO
reset
Mode: If supported DMA
Writing 1 empties the FIFO, writing 0 has no effect
Writing 0 will disable the UART’s FIFO-mode, writing 1 will enable FIFO-mode
0
FIFO
enable
7
6
5
4
0
00 = FIFO-mode has not been enabled
11 = FIFO-mode is currently enabled
3
2
1
0
0
‘highest priority’ UART
Interrupt still pending
highest
011 = receiver line-status
010 = received data ready
100 = character timeout
001 = Tx Holding Reg empty
000 = modem-status change
lowest
1 = No UART interrupts are pending
0 = At least one UART interrupt is pending
• You need to ‘clear’ a reported interrupt by
taking some action -- depending on which
condition was the cause of the interrupt:
– Line-Status: read the Line Status Register
– Rx Data Ready: read Receiver Data Register
– Timeout: read from Receiver Data Register
– THRE: read Interrupt Identification Register or
write to Transmitter Data Register (or both)
– Modem-Status: read Modem Status Register
• A UART can be programmed to operate in
“polled” mode or in “interrupt-driven” mode
• While “Polled Mode” is simple to program
• It does not make efficient use of the CPU in
situations that require ‘multitasking’ (as the
CPU is kept busy doing “polling” of the UART’s
status instead of useful work
Read the Line Status Register
NO
Transmit Holding Register
is Empty?
YES
Write byte to the Transmitter Data Register
DONE
Read the Line Status Register
NO
Received Data
is Ready?
YES
Read byte from the Receiver Data Register
DONE
// declare the program’s variables and constants
char inch, outch = ‘A’;
// --------------------- Transmitting a byte ------------------// wait until the Transmitter Holding Register is empty,
// then output the byte to the Transmit Data Register
do { } while ( (inb( LINE_STATUS) & 0x20) == 0 );
outb( outch, TRANSMIT_DATA_REGISTER );
// ---------------------- Receiving a byte -----------------------// wait until the Received Data Ready bit becomes true,
// then input a byte from the Received Data Register
do { } while ( (inb( LINE_STATUS ) & 0x01 ) == 0 );
inch = inb( RECEIVED_DATA_REGISTER );
Set the Divisor Latch Access Bit
in the Line Control Register
Write a nonzero value to the Divisor Latch Register
Clear the Divisor Latch Access Bit
and specify the desired data-format
in the Line Control Register
Set the Loopback bit
in the Modem Control Register
DONE
• IO Privilege Level
• Linux provides a system-call to privileged
programs which need to access I/O ports
• The <sys/io.h> header-file prototypes it, and
the ‘iopl()’ library-function invokes it
• The kernel will modify the CPU’s current I/O
Permission Level in cpu’s EFLAGS (if the
program’s owner has ‘root’ privileges)
• First execute our ‘iopl3’ command
• Use Root mode to do this
• Download and run our ‘testuart.cpp’ demo
• It uses the UART’s ‘loopback’ test mode to
‘receive’ each character that it ‘transmits’
UART ‘loopback’ mode
TxShiftReg
TxData
RxShiftReg
RxData
Output loops back to become input
The external signal-lines are bypased
#define UART_PORT
0x03F8 // base port-address for the UART
#define DIVISOR_LATCH
(UART_PORT + 0)
#define TX_DATA_REG
(UART_PORT + 0)
#define RX_DATA_REG
(UART_PORT + 0)
#define LINE_CONTROL
(UART_PORT + 3)
#define MODEM_CONTROL
(UART_PORT + 4)
#define LINE_STATUS
(UART_PORT + 5)
char msg[] = "\n\tThis is a test of the UART's loopback mode\n";
int main( int argc, char **argv ) {
// set the CPU's I/O Permission-Level to allow port-access
if ( iopl( 3 ) ) { perror( "iopl" ); exit(1); }
// establish the UART's operational parameters
outb( 0x80, LINE_CONTROL ); // set DLAB=1
outw( 0x0001, DIVISOR_LATCH );
// set 11520 baud
outb( 0x03, LINE_CONTROL ); // set data-format: 8-N-1
outb( 0x10, MODEM_CONTROL );
// turn on 'loopback' mode
// write each message-character, read it back, and display it
for (int i = 0; i < sizeof( msg ); i++) {
do { } while ( (inb( LINE_STATUS )&0x20) == 0x00 );
outb( msg[i], TX_DATA_REG );
do { } while ( (inb( LINE_STATUS )&0x01) == 0x00 );
int
data = inb( RX_DATA_REG );
printf( "%c", data );
}
outb( 0x00, MODEM_CONTROL );// turn off 'loopback' mode
printf( "\n" );
}