Joraa001_presentation
advertisement

A Constraint Programming Approach to
Solving a Ship Loading Problem
Andreas Jordan
Professor Markus Stumptner
Background
• Currently, load plans for amphibious ships are
• created by ‘dragging and dropping’ representative size
boxes into a trim and stability software program.
• There is a requirement for some automated support
• when planning loads for both the amphibious ‘mother
ships’ and associated watercraft conducting landings /
withdrawals.
2
Objectives
• The primary objective
• minimise the space used by the loads => minimising the
number of amphibious ships and watercraft to conduct
operations.
• Near-optimal solutions preferred within the order of
seconds
• The load must also produce a stable load plan
3
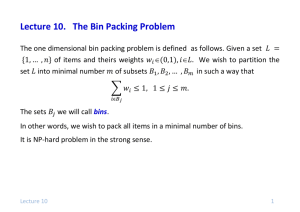
Problem Description
• Belongs to the general class of “Bin Packing Problems”
• Description:
• The packing of a finite number of rectangles into a number of larger
sized bins where:
• No items are allowed to extend past the edges of the bin nor any overlap
permitted.
• The challenge is to assign all the items, with no overlap, to the minimum
number of bins with their edges parallel to those of the bins.
• Problem is NP-Hard (ie. cannot be solved in polynomial time)
• Exhaustive search impractical. Therefore, heuristical
methods are required for most practical problems.
4
Sourcing Software
• Description of problem readily lends itself to modelling as a
Constraint Optimisation Problem (COP)
• Possible choices:•
•
•
•
•
Matlab
Eclipse
Prolog
ILOG CPLEX®
Comet
• Selection criteria
•
•
•
•
Acquisition costs
Optimised libraries with pre-built constraint-reasoning functionality
Availability of Global Constraints (eg. selectMin)
=> Comet
5
Modelling as a Constraint Optimisation Problem
• Determine the finite domain decision variables
•
•
•
•
Packing – establishes a relationship between an item and a bin. eg.
Load – tracks the current load of each bin
X – represents x-positions within each bin
Y – represents y-positions within each bin
• Domains
• Items – represents the number of items to be packed
• Bins – total number of bins
• Constraints
• Constrain load of bin
• Constrain placement of items within bin
• Minimise the number bins used to pack items
6
Packing Heuristic Selection
• Several packing algorithms exist, including:• Finite-First-Fit
• Bottom-Left-Fill
• …and many more
• Most not suitable for this application:• they typically require items to be sorted in non-decreasing order
• no advantage taken of additional attributes (eg. weight)
• Key requirements, including:• Prioritisation of items – Strict, Flexible and None
• Stability of packing (lateral and longitudinal)
• Can make no assumptions about the distribution of item sizes
7
Packing Barrier (Heidelberg et al,1998)
• Nine barrier types
•
•
•
•
C, RL, LR, LCR, CLR, LRC, RCL, RLC, CRL
Barrier composed of (up to) 5 segments
Pack item into lowest barrier
LX, LY, CX, RX, RY represent cartesian barrier coordinates
LX
C
RL
LR
LCR
CLR
LRC
RCL
RLC
CRL
LY
RY
CX
RX
Packed items
8
Representing Variables in Comet
• Example
• var<CP>{int} packing[Items](cp, Bins);
• Explanation
• Var<CP> - declaration for a finite domain decision variable
• {int} – declares that the domain comprises discrete integers
• packing[Items] – name of variable where “Items” represent the
range of variables associated with ‘packing’
• (cp, Bins) - range of valid integer values that each variable can
take.
• This representation allows the constraint solver to reason
• packing[1] = 1..12
•…
• packing[100] = 1..12
9
Representing Constraints in Comet
Solver<CP> cp();
//declare the variables
Solve<cp>{
//post the constraints
//Constraint which ensures that the load of any bin is less than
or equal to a bins capacity
forall(b in Bins)
cp.post((load[b] == sum(i in Items)
(packing[i]==b)*itemWeight[i]) && load[b] <= binCapacity_) ;
} using{
//non deterministic search
}
10
Preliminary Results
• 4 items
==== Post-processing Results ====
Solution found with: 2 bins
load[43800,42000,0,0,0,0,0,0,0,0]
packing[1,2,1,1]
x[0,0,34,44]
y[0,0,0,0]
#Choices = 8
#fail = 0
Time: 0 seconds
==== End ====
• 8 items
==== Post-processing Results ====
Solution found with: 2 bins
load[45400,44000,0,0,0,0,0,0,0,0]
packing[1,2,1,1,1,2,2]
x[0,0,34,0,18,0,15]
y[0,0,0,96,96,96,96]
#Choices = 39728
#fail = 158149
Time: 4 seconds
==== End ====
• >8 items (using Windows machine with 2GB RAM)
• runs out of virtual ram after approximately 3 hours
11
Further Work
• Implement item placement based on multi-tiered
priorities
• Incorporate centre-of-gravity calculations to build
solutions already favouring a stable load
• Automatic barrier adjustment after failing to insert any
items
• Adjust upper bound on item length to be uppermost
adjacent level plus/minus a tolerance, t.
• Incorporate No-Go zones
12
Thankyou
• Questions?
Source:
Wikipedia
…different watercraft and ship types should be considered
Source: http://www.tomw.net.au/technology/transport/amphibious.shtml
13
References
• Dyckhoff, H 1990, 'A typology of cutting and packing problems', European
Journal of Operational Research, vol. 44, no. 2, pp. 145-159.
• Sexton, J, et al. 2004, Efficient Solutions in Load Planning, DEFENCE
SCIENCE AND TECHNOLOGY ORGANISATION SALISBURY
(AUSTRALIA) SYSTEMS SCIENCES LAB.
14