Formal Design Review
advertisement

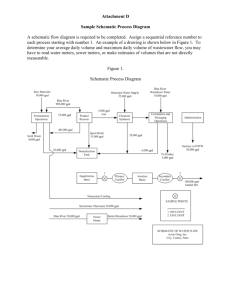
Formal Design Review Ryan McLean John-Michael Mulesa Joe Perrin Zach Schoenberger [Outline] • • • • • • • • • Project Overview Project-Specific Success Criteria Block Diagram Component Selection Rationale Packaging Design Schematic & Theory of Operation PCB Layout & Considerations Software Design & Development Status Project Completion Timeline [Project Overview] • GPS-Based Head-Up Display – – – – – Multi-mode driving aid GPS navigation Google Maps® (GSM chip) Performance data Color display • Infinite focus • Dashboard-mounted [Proposed PSSCs] 1. An ability to display speed and elevation (obtained using GPS). 2. An ability to display heading and G-force (obtained using compass and accelerometer). 3. An ability to toggle map overlays (obtained via GSM modem from Google Maps). 4. An ability to project a heads-up display focused at infinity. 5. An ability to change display brightness and vertical position. [Block Diagram] Component Selection Rationale Packaging Design [Packaging Design] • Size – Plenty to pack inside! – Limited external space • Color – Matte black – Reduce/eliminate glare • Material – Aluminum construction – Electronic components not affected [Packaging Design] [Packaging Design] [Packaging Design] [Packaging Design] Schematic & Theory of Operation [Schematic & Theory of Operation] • GM862-GPS – GPS/GSM Unit – 3.5V operation – SCI connection to microcontroller – Query-based data retrieval • Query sent from microcontroller • Formatted, query-based data returned [Schematic & Theory of Operation] • HMC6352 – Digital Compass – 3.5V operation – I2C connection to microcontroller – Pass an address over I2C interface to listen to compass module [Schematic & Theory of Operation] • ADXL345 – Accelerometer – 3.5V operation – I2C connection to microcontroller – Pass an address over I2C interface to listen to accelerometer – Both accelerometer and compass are connected to one I2C bus [Schematic & Theory of Operation] • FT232RL – USB to RS232 Adapter – – – – 3.5VCCIO 5VCC SCI connection to microcontroller USB connection to ARM board [Schematic & Theory of Operation] • ATXMega16D4 – 3.5V operation – 12MHz frequency – Using: • • • • • 2 SCI buses 1 I2C bus 1 PWM 1 ADC 4 GPIO PCB Layout & Considerations [PCB Layout & Considerations] Peripheral Considerations • Keep I2C components close together • Keep USB to RS232 IC close to USB connector • Headers to access I/O traces • Test points on power rails to quickly measure voltage • GSM/GPS unit can draw 2A – Uses direct connection to ground and power – Assumes no vias [PCB Layout & Considerations] Microcontroller Considerations • Locate microcontroller near middle of board • Use 0.1μF decoupling capacitor for each power-ground pair • Small current draw • Internal oscillator [PCB Layout & Considerations] Power Considerations • Max current draw is about 2.2A – Traces will have to be able to cope with current draw • Approximately 1.1mm traces – Need sufficient bulk capacitance – Minimize vias on power rails Software Design & Development Status [Microcontroller] • Polling the peripherals – Timer interrupt driven polling of the peripherals • Accelerometer • Digital compass • Control knob for mirror – RTI driven peripherals • All external buttons • Controls Servo Motor – PWM signal used to control servo to adjust mirror – Based on change in Control Knob • GSM Data – Retrieves data constantly based on SCI interrupts – Immediately signals ARM board and sends data [Microcontroller] • Interfacing with the ARM board – Forwards data about peripherals upon request • Based on custom instruction set over SCI – ARM board can ask for data about specific peripheral – Interrupt driven – Forwards GSM data over SCI every time new data is received [ARM Board] • Communicates with microcontroller to get raw data – Accelerometer, Digital Compass data • Deals with all image manipulation • Sends final image to projector Project Completion Timeline [Project Completion Timeline] Week Milestone Items Due 8 • Package design to EE shop • PCB, schematic revisions complete Formal Design Review 9 • Image display software started • Microcontroller software started • Projector ordered Final PCB Final Schematic Proof-of-Parts 10 Spring Break 11 • MCU-to-ARM communication • Package complete • Send/receive via GSM modem verified • Receive GPS data verified Software Design Narrative 12 • Image display software finished • PCB assembled, tested Patent Liability Analysis [Project Completion Timeline] Week Milestone Items Due 13 • External control functionality • Projector, mirror mounted in package Reliability and Safety Analysis 14 • MCU, ARM mounted in package • Initial “full-package” testing Ethical and Environmental Impact Analysis 15 • Dashboard mount fabrication • Vehicle testing • Final documentation User Manual 16 • Guest vehicle demonstrations • Project complete PSSC Demos [Summary] • • • • • • • • • Project Overview Project-Specific Success Criteria Block Diagram Component Selection Rationale Packaging Design Schematic & Theory of Operation PCB Layout Software Design & Development Status Project Completion Timeline [Questions?]