symmetry
symmetry
LAVAL
LAVAL
SHINZOX
SHINZOX
ININI
ININI
ININI
ININI
bd
pq
Dyslexia…
bd
pq
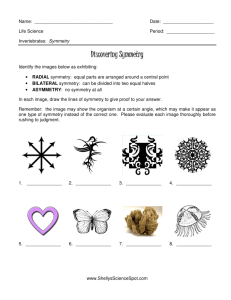
• Symmetry:
• From greak (sun) ‘’with" (metron) "measure"
• Same etymology as "commensurate"
• Until mid-XIX: only mirror symmetry
Definitions
• Transformation, Group
• Évariste Galois 1811, 1832.
Symmetry:
Property of invariance of an objet
under a
space transformation
Definitions
Symmetric:
Invariant under
at least two
transformations
Asymmetric:
Invariant under one
transformation.
Dissymetric:
Lost of symmetry…
Transformation
• Bijection which maps a geometric set in itself
M
f(M)=M’
• Affine transformation maps two points P and P’ such that:
f(M) = P’ + O(PM)
P
P
P’
f : positions
O : vectors
Affine transformation
preserves lines, planes, parallelism
• Translation: O identity
P
P
P
P
P
P
P’
• Homothety: O(PM)=k.PM
• Affinité: Homothety in one direction
• Isometry: preserves distances
P
P
• Simililarity: preserves ratios
P
P
Translation
• Infinite periodic lattices
Homothety
• Self-similar objects
• Infinite fractals
Similitude
Infinite fractal
Logarithmic spiral (r=aebq)
q -> q+q’
r -> re-bq’
e-bq’
q’
Isometries
f(M) = P’ + O(PM)
• Isometry ||O(u)||=||u||
distance-preserving map
• Two types of isometry:
• Affine isometry: f(M)
• Transforms points.
• Microscopic properties of crystals (electronic structure)
• Helix of pitch P
• Translation
• Rotations
• Reflections
(a, Pa /2p)
• Linear isometry O(PM)
• Transforms vectors (directions)
• Macroscopic properties of crystals (response functions)
60°
• Rotations
• Reflections
E
?
Linear isometry- 2D
||O(u)|| = ||u||
• In the plane (2D)
• Rotations
q
• Determinant +1
• Eigenvalues eiq, e-iq
• Reflections
(reflections through an axis)
q/2
• Determinant -1
• Eigenvalues -1, 1
Linear isometry - 3D
• ||O(u)|| = |l| ||u||
Eigenvalues |l | = 1
• l : 3rd degree equation (real coefficients)
±1, eiq, e-iq (det. = ± 1)
• In space (3D) :
• det. = 1
• Direct symmetry
• det. = -1
• Indirect symmetry
𝟏
𝟎
𝟎
−𝟏
𝟎
𝟎
𝟎
cos 𝜽
sin 𝜽
𝟎
− sin 𝜽
cos 𝜽
Rotations
a) Rotation by angle q
b) Roto-reflection q
Improper rotation
c) Inversion (p)
d) Roto-inversion (p+q )
c) Reflection (0)
𝟎
cos 𝜽
sin 𝜽
𝟎
− sin 𝜽
cos 𝜽
Rotoreflections
q
q
q
Stereographic projection
• To represent directions
preserves angles on the sphere
NN
Direction OM
M
P’
O
P
P’
M’
P
S
P, projection of OM :
Intersection of SM and equator
• Conform transformation (preserves angles locally) but not affine
Main symmetry operations
• Conventionally
• Direct
• Rotations (An)
• Reflections (M)
• Inversion (C)
• Rotoinversion (An)
• n-fold rotation An (2p/n)
• Represented by a polygon of same symmetry.
.
.
.
.
.
A2 vertical
A2 horizontal
• Indirect
•
•
•
•
M vertical
M horizontal
. .
.
A3
A4
.
.
.
A5
• Symmetry element
• Locus of invariant points
_
. .
.
.
Rotoreflections (An)
Reflection (M)
Inversion (C)
Rotoinversions (An)
.
.
.
~
_
. .
M
.
.
Inversion
.
.
A4
Difficulties…
• Some symmetry are not intuitive
• Reflection (mirrors)
• Rotoinversion
‘’The ambidextrous universe’’
Why do mirrors reverse left and right
but not top and bottom
Composition of symmetries
• Two reflections with angle a = rotation 2a
M’M=A
M
2a
a
M’
• Euler construction
AN3
AN1
p/N1
Composition of two rotations
= rotation
AN2AN1=AN3
• No relation between N1, N2 et N3
AN2
p/N2
Point group: definition
• The set of symmetries of an object
forms a group G
•
•
•
•
•
A and B G, AB G (closure)
Associativity (AB)C=A(BC)
Identity element E (1-fold rotation)
Invertibility A, A-1
No commutativity in general (rotation 3D)
1
2
2
1
• Example: point groupe of a rectangular table (2mm)
Mx
My
A2
*
E
Mx
My
A2
E
E
Mx
My
A2
Mx
Mx
E
A2
My
My
My
A2
E
Mx
A2
A2
My
Mx
E
• Multiplicity: number of elements
2mm
Composition of rotations
Constraints
AN1
p/N1
AN3 AN2
p/N2
234
Spherical triangle, angles verifies:
22N (N>2), 233, 234, 235
Dihedral groups
Multiaxial groups
Curie’s groups
Cubic
Hexagonal
Tetragonal
Trigonal
Orthorhombic
Monoclinic
Triclinic
...
An
1
2
3
4
6
32
422
622
2
An A2
222
_
Points groups
• Sorted by
Symmetry degree
• Curie‘s limit groups
• Chiral, propers
An
_
1
_
2=m
_
3
_
4
_
6=3/m
• Impropers
An/M
/m
2/m
4/m
6/m
4mm
6mm
• Centrosymmetric
An M
2mm
3m
m
_
An M
_
3m
_
_
_
_
42m (4m2) 62m (6m2)
/mm
An /MM’
mmm
4/mmm
6/mmm
An An’
23
432
_
m3
_
43m
_
An An’
_
m3m
/m/m
23
_
m3
Multiaxial groups
532
432
_
_
__
43m
m3m
53m
Tétraèdre
Octaèdre
Icosaèdre
Cube
Dodécaèdre
Points group:
Notations
• Hermann-Mauguin
(International notation - 1935)
• Generators (not minimum)
• Symmetry directions
• Reflection ( - ): defined by the normal to the plane
Primary Direction: higher-order symmetry
Secondary directions : lower-order
4 2 2
mmm
Notation
réduite
4 mm
m
Tertiary directions : lowest-order
• Schönflies : Cn, Dn, Dnh
Les 7 groupes limites de Pierre Curie
Cône tournant
Vecteur axial + polaire
Cylindre tordu
Tenseur axial d’ordre 2
Cylindre tournant
Vecteur axial (H)
Cône
Vecteur polaire (E, F)
Cylindre
Tenseur polaire d’ordre 2 (susceptibilité)
Sphère tournante
Scalaire axial (chiralité)
Sphère
Scalaire polaire (pression, masse)
2
/m
m
/mm
/m /m
 0
0