January 25, 2008
INCOSE IW Albuquerque
Model-Based Systems Engineering (MBSE)
Challenge Team Status Report
Mechatronics /
Engineering Analysis & Simulation
Presenter
Russell Peak - Georgia Tech
presentation version v1.1
Portions are Copyright © 2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
Permission to reproduce and distribute without changes for non-commercial purposes (including internal corporate usage) is hereby granted provided this notice and a proper citation are included.
Collaboration Approach
Primary Current Team
• Deere & Co.
– Roger Burkhart
• Georgia Institute of Technology (GIT)
– Russell Peak, Chris Paredis, Leon McGinnis, & co.
– Leveraging collaborations in
PSLM Center SysML Focus Area (see next slide)
• Lockheed Martin
– Sandy Friedenthal
Page 2
GIT Product & Systems Lifecycle Management Center
Leveraging Related Efforts
www.pslm.gatech.edu
• SysML-related projects:
– Deere, Lockheed, NASA, NIST, TRW Automotive, ...
• Other efforts based at GIT:
– NSF Center for Compact & Efficient Fluid Power
– SysML course development
• For Professional Masters in SE program, continuing ed. short course, ...
– Other groups & labs
– Vendor collaboration (tool licenses, support, ...)
• Consortia & other GIT involvements:
–
–
–
–
INCOSE Model-Based Systems Engineering (MBSE) effort
NIST SE Tool Interoperability Plug-Fest
OMG (SysML, ...)
PDES Inc. (APs 210, 233, ...)
• Commercialization efforts:
– www.VentureLab.gatech.edu-based start-up:
tools for executable SysML parametrics
Contents
• Problem Description
– Characteristics of Mechatronic Systems
– Challenge Team Objectives
• Technical Approach
– Techniques and Testbeds
• Expected Deliverables & Outcomes
• Collaboration Approach
Page 4
Characterizing Mechatronics
From Rennselaer Mechatronics Web Site
Page 5
Mechatronics Architecture
Software
Interface
• Displays
• User Controls
• Haptics
• Remote Links
• ...
• Functions
• Operating Modes
• State Machines
• Control Systems
• ...
Electronic
Control Unit
(ECU)
• Modules, Libraries
• Messages
• Protocols
• Code
• ...
Actuators
Sensors
Communications Bus
“Mechanical System”
• Kinematics & Dynamics
• Powertrain
• Thermal
• Fluids
• Electric Power
• ...
Electronics
Feedback Control Loop
Page 6
Mechatronics Product Categories
From Tamburini & Deren, PLM World ‘06
MBSE Challenge Team Objectives
Phase 1: 2007-2008
Overall Objectives
• Define & demonstrate capabilities
to achieve system-simulation interoperability (SSI)
• Phase 1 Scope
– Capabilities: Methodologies, tools, requirements,
and practical applications
– SSI subset: Connecting system specification & design models
with multiple engineering analysis & dynamic simulation models
• Test & demonstrate how SysML facilitates effective SSI
Objectives to date primarily based on projects in GIT PSLM Center
sponsored by industry and government—see backup slides.
Page 8
MBSE Challenge Team Objectives
Phase 1: 2007-2008
Specific Objectives
1. Define system-simulation interoperability (SSI) methodology
2. Define SysML and analysis tool requirements to support SSI
1. Provide feedback to vendors and OMG SysML 1.1 revision task force
3. Demonstrate methodology with 3+ engineering analysis
and dynamic simulation model types
1. Include representative building block library: fluid power
2. Include hybrid discrete/continuous systems
described by differential algebraic equations (DAEs)
4. Develop roadmap beyond Phase 1
Page 9
Contents
• Problem Description
– Characteristics of Mechatronic Systems
– Challenge Team Objectives
• Technical Approach
– Techniques and Testbeds
• Expected Deliverables & Outcomes
• Collaboration Approach
Page 10
Overall Technical Approach
• Technique Development
– Collective model framework technology
• Similar to federated / multi-aspect system models (?)
– System-simulation interoperability (SSI) methodology
– etc.
• Testbed Implementations & Execution
• Iteration
Page 11
Technical Approach—Subset
• Standards-based framework technology
– Collective system models
– Utilize SysML where appropriate (esp. parametrics)
• System-simulation interoperability (SSI) methodology
– Harmonize, generalize, extend new & existing work
– COBs, CPM, KCM, MACM, MRA, OOSEM, ...
• Testbeds
–
–
–
–
Develop and test techniques iteratively
Implement test cases for verification & validation
Produce reference examples
Produce open resources
(e.g., SysML-based fluid power libraries)
Page 12
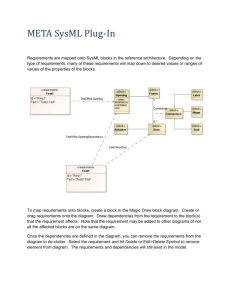
Example Collective Systems Model
Logical composition of models based on various
ontologies/schemas (from native tools, standards, in-house)
Propulsion
Fluid Dynamics
• Standard:
• Standard: CFD
• Software • Status: In Development
• Boeing,
STEP-PRP
• Software:• Status: In Development
• ESA, EADS
Electrical Engineering
Cabling
• Standard: AP210
• Standard: AP212
• Software Mentor Graphics
• Status: Prototyped
• Rockwell, Boeing
• Software MentorGraphics
• Status: Prototyped
• Daimler-Chrysler, ProSTEP
Software Engineering
Optics
Mechanical Engineering
• Standard: NODIF
• Standard: AP203, AP214
• Software - TBD
• Minolta, Olympus
• Software Pro-E, Cadds, SolidWorks,
AutoCad, SDRC IDEAS, Unigraphics,
others
• Status: In Production
• Aerospace Industry Wide, Automotive
Industry
Structural Analysis
• Standard: AP209
Spacecraft Development
Machining
STEP-NC/AP224
•Software:: Gibbs,
•Status:: In Development / Prototyped
Adapted from 2001-12-16 - Jim U’Ren, NASA-JPL
Systems Engineering
• Standard: AP233
• Standard: STEP PDM Schema/AP232
• Standard: STEP-TAS
•STEP-Tools, Boeing
• Software:Rational Rose, Argo, All-Together
• Status: In Production
• Industry-wide
PDM
Thermal Radiation Analysis
• Standard::
Development)
• Software: Statemate, Doors, Matrix-X,
Slate, Core, RTM
• Status: In development / Prototyped
• BAE SYSTEMS, EADS, NASA
• Software: MSC Patran, Thermal
Desktop
• Status: In Production
• Lockheed Martin, Electric Boat
• Software: Thermal Desktop, TRASYS
• Status: In Production
• ESA/ESTEC, NASA/JPL & Langely
• Standard::UML - (AP233 interface In
Inspection
• Standard: AP219
• Software: Technomatics, Brown,
eSharp
• Status: In Development
• NIST, CATIA, Boeing, Chrysler, AIAG
• Software: MetaPhase, Windchill, Insync
• Status: In Production
• Lockheed Martin, EADS, BAE SYSTEMS,
Raytheon
Life-Cycle Management
• Standard: PLCS
• Software: SAP
• Status: In Development
• BAE SYSTEMS, Boeing, Eurostep
Model-Centric Framework
Produce, Merge, Enrich, Consume
http://eislab.gatech.edu/pubs/journals/2004-jcise-peak/
Producer Tools
(Primary Authoring)
Tool A1
...
Tool An
Propulsion
Fluid Dynamics
• Standard:
• Standard: CFD
• Software • Status: In Development
• Boeing,
STEP-PRP
• Software:• Status: In Development
• ESA, EADS
Electrical Engineering
Cabling
• Standard: AP210
• Standard: AP212
• Software Mentor Graphics
• Status: Prototyped
• Rockwell, Boeing
• Software MentorGraphics
• Status: Prototyped
• Daimler-Chrysler, ProSTEP
Software Engineering
Optics
Mechanical Engineering
• Standard: NODIF
• Standard: AP203, AP214
• Software - TBD
• Minolta, Olympus
• Software Pro-E, Cadds, SolidWorks,
AutoCad, SDRC IDEAS, Unigraphics,
others
• Status: In Production
• Aerospace Industry Wide, Automotive
Industry
Structural Analysis
• Standard: AP209
Spacecraft Development
Machining
STEP-NC/AP224
•Software:: Gibbs,
•Status:: In Development / Prototyped
Enricher Tools
(Secondary Authoring)
Systems Engineering
• Standard: AP233
• Standard: STEP PDM Schema/AP232
• Standard: STEP-TAS
•STEP-Tools, Boeing
• Software:Rational Rose, Argo, All-Together
• Status: In Production
• Industry-wide
PDM
Thermal Radiation Analysis
• Standard::
Development)
• Software: Statemate, Doors, Matrix-X,
Slate, Core, RTM
• Status: In development / Prototyped
• BAE SYSTEMS, EADS, NASA
• Software: MSC Patran, Thermal
Desktop
• Status: In Production
• Lockheed Martin, Electric Boat
• Software: Thermal Desktop, TRASYS
• Status: In Production
• ESA/ESTEC, NASA/JPL & Langely
• Standard::UML - (AP233 interface In
Inspection
• Standard: AP219
• Software: Technomatics, Brown,
eSharp
• Status: In Development
• NIST, CATIA, Boeing, Chrysler, AIAG
• Software: MetaPhase, Windchill, Insync
• Status: In Production
• Lockheed Martin, EADS, BAE SYSTEMS,
Raytheon
Life-Cycle Management
• Standard: PLCS
• Software: SAP
• Status: In Development
• BAE SYSTEMS, Boeing, Eurostep
Collective System Model
Tool Bj
Consumer Tools
(e.g., Solvers)
Tool Ck
Meta-Building Blocks:
• Information models & meta-models
• International standards
• Industry specs
• Corporate standards
• Local customizations
• Modeling technologies:
• Express, UML, SysML,
COBs, OWL, XML, …
Sample Standards-based
Model-Centric Framework
Producer
Tools
Electrical
CAD Tools
Mechanical
CAD Tools
Eagle
NX
Mentor
Graphics
CATIA
AP210
Systems Engineering
Tools
DOORS
E+,
MagicDraw,
...
AP203, AP214
…
AP233, SysML
Collective System Model
Standards-based
Submodels
AP210
AP210+
Enricher Tools
(Gap-Fillers)
XaiTools
XaiTools
PWA-B
PWA-B
Stackup Tool
Consumer
Tools
Meta-Building Blocks:
• Information models & meta-models
• International standards
• Industry specs
• Corporate standards
• Local customizations
• Modeling technologies:
• Express, UML, SysML,
COBs, OWL, XML, …
XaiTools
XE
Warpage Tool
Technical Approach—Subset
• Standards-based framework technology
– Collective system models
– Utilize SysML where appropriate (esp. parametrics)
• System-simulation interoperability (SSI) methodology
– Harmonize, generalize, extend new & existing work
– COBs, CPM, KCM, MACM, MRA, OOSEM, ...
• Testbeds
–
–
–
–
Develop and test techniques iteratively
Implement test cases for verification & validation
Produce reference examples
Produce open resources
(e.g., SysML-based fluid power libraries)
Page 16
“Wiring Together” Diverse Models via SysML
Level 1: Intra-Template Diversity
par [cbam] LinkagePlaneStressModel [Definition view]
L
B
s
ts1
ts2
red = idealized parameter
rib1
ds1
shaft
rib2
sleeve1
sleeve2
B
soi: Linkage
ds2
Leff
effectiveLength:
deformationModel:
LinkagePlaneStressAbb
sleeve1:
width:
Mechanical
CAD model
CAE model
(FEA)
l:
wallThickness:
ws1:
outerRadius:
ts1:
rs1:
sleeve2:
ws2:
width:
ts2:
wallThickness:
rs2:
outerRadius:
tf:
wf:
shaft:
tw:
ex:
criticalCrossSection:
uxMax:
nuxy:
basicIsection:
sxMax:
force:
flangeThickness:
flangeWidth:
webThickness:
condition: Condition
material:
reaction:
name:
mechanicalBehaviorModels:
description:
sxMosModel:
MarginOfSafetyModel
linearElastic:
youngsModulus:
determined:
allowable:
marginOfSafety:
poissonsRatio:
yieldStress:
Symbolic
math models
uxMosModel:
MarginOfSafetyModel
determined:
allowableInterAxisLengthChange:
allowable:
marginOfSafety:
[Peak et. al 2007]
Diverse Types of Relations ...
(partially supported to date)
System A
System B
a1
b1
b1 = a1 + a2
a2
formula-based
a3
b2
equality
a4
a4 < 100
constraint
a5[ i ]
b3
b3 = AVG( a5 )
aggregate
a6
b4
if (a6 <= 250) b4 = 250
if (250 < a6 < 300) b4 = 300
if( a6 > 300 ) b4 = a6
buffered
a7
if a7 <= 10
b5
if a7 > 10
b6
selector
a8
while a8 <= 50
b7
breaker
a9
b8
black-box
a10
b9
unidirectional
[Tamburini, Peak, Paredis 2005]
“Wiring Together” Diverse Models via SysML
Level 2: Inter-Template Diversity
Naval Systems-of-Systems (SoS) Panorama—An Envisioned Complex Model Interoperability Problem Enabled by SysML/COBs/MRA
Optimization Templates
System Description
Tools & Resources
Simulation
Building Blocks
ECAD & MCAD Tools
Tribon, CATIA, NX, Cadence, ...
Legend
Simulation Templates
of Diverse Behavior & Fidelity
Evacuation
Mgt.
Tool Associativity
Object Re-use
Simulation
Solvers
Evacuation Codes
Egress, Exodus, …
…
2D
General Math
Mathematica,
Maple, Matlab,…
Propeller
Hydrodynamics
Systems & Software Tools
DOORS,
Studio,
MagicDraw,
Eclipse, …
3D
…
Operation Mgt. Systems
CFD
Flotherm, Fluent, …
…
Damaged
Stability
Libraries & Databases
Classification Codes, Materials,
Personnel, Procedures, …
Augmented
Descriptive Models
Navigation
Accuracy
Utilizes generalized MRA terminology (preliminary)
FEA
Abaqus, Ansys,
Nastran, …
Discrete Event
Arena, Quest, …
Russell.Peak@gatech.edu 2007-09
Technical Approach—Subset
• Standards-based framework technology
– Collective system models
– Utilize SysML where appropriate (esp. parametrics)
• System-simulation interoperability (SSI) methodology
– Harmonize, generalize, extend new & existing work
– COBs, CPM, KCM, MACM, MRA, OOSEM, ...
• Testbeds
–
–
–
–
Develop and test techniques iteratively
Implement test cases for verification & validation
Produce reference examples
Produce open resources
(e.g., SysML-based fluid power libraries)
Page 20
Excavator Modeling & Simulation Environment
GIT Testbed: Tool-Model View
RSA/E+ / SysML
Excavator
Executable
Scenario
Model Center
Objective
Function
Operational Scenario
NX / MCAD Tool
No Magic / SysML
CAD Model
Excavator
System Model
XaiTools
Cost
Model
Optimizer
Reliability
Model
Modelica
Tools
Process Flow
Factory CAD
EM Plant / Factory Flow
Factory
Layout
Process
Simulation
Tool Types
Generic Tool Behavior
RSA/E+ / SysML
Factory
Model
2007-11-05
Dig Cycle
Model
MCAD Tools
NX
Data Mgt. Tools
B. Simulation Building Block
Libraries
Cost
Concepts
Optimization
Concepts
Reliability
Concepts
Solid
Mechanics
Queuing
Concepts
Fluid
Mechanics
D. Context-Specific
Models
Excavator Sys-Level Models
Optimization Model
Objective
Function
Cost
Model
Excel
C. Collective Descriptive Models
Excavator Domain Models
SysML Tools
RSD/E+
...
MagicDraw
Hydraulics
Subsystem
Req. &
Objectives
Dig Site
Boom
Linkages
Dump Trucks
Factory Domain Models
Factory CAD Tools
Collective Factory Model
Factory
CAD
Assembly Lines
AGVs
Buffers
Work Cells
Machines
Optimizers
ModelCenter
Generic Math Solvers
Reliability
Model
Excel
Dig Cycle
Model
Mathematica
Collective Excavator Model
Operations
E. Solvers
Boom Linkage Models
Stress/Deformation Models
Sys Dynamics Solvers
2008-01-25
Modelica
Extensional
Linkage Model
FEA Solvers
Plane Stress
Linkage Model
Ansys
Boom Mfg. Assembly Models
Assembly Process Models
MM1 Queuing
Assy Model
Discrete Event
Assy Model*
Discrete Event Solvers
(Specialized)
eM-Plant /
Factory Flow
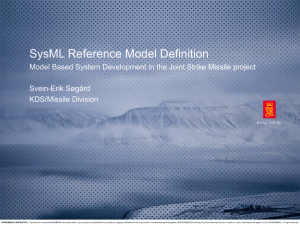
Notes & Legend
1) All models shown are SysML models unless otherwise noted.
2) Each authoring & solving tool also has a native model (not shown)
unless otherwise noted.
3) Infrastructure and middleware tools are also present (not shown)--e.g.,
PLM, CM, parametric graph managers (XaiTools etc.), repositories, etc.
A. Descriptive Tools
(Authoring Tools, ...)
Tool interface (via XaiTools, etc.)
Parametric relationship
Composition relationship
Native model relationship (via tool interface, stds., ...)
GIT Testbed: Pattern View (Interoperability Panorama)
* This model is in a GIT prototype tool
(with a schema based on its offline SysML model).
Excavator Modeling & Simulation Environment
Progress to Date (2008-01)
• SysML authoring tools selection and operation
(EmbeddedPlus/Rational, MagicDraw)
• Excavator as testbed problem
• Initial iterations of excavator system models
• Preliminary system-simulation interoperability (SSI) approach
– Harmonizing system design & analysis models integration methods
• Preliminary testbed environment
– Dig cycle simulation (Modelica)
– CAD/engineering analysis (NX, Ansys)
– Factory simulation (eM-Plant)
• Test suites for [topic] development/demonstration/V&V
– Idealized mass-spring-damper [continuous dynamics]
– Flap linkage [SSI method - mechanical benchmark]
Excavator Modeling & Simulation Environment
GIT Testbed: Tool-Model View
RSA/E+ / SysML
Excavator
Executable
Scenario
Model Center
Objective
Function
[WIP models]
Operational Scenario
NX / MCAD Tool
No Magic / SysML
CAD Model
Excavator
System Model
XaiTools
Cost
Model
Optimizer
Reliability
Model
Modelica
Tools
Process Flow
Factory CAD
EM Plant / Factory Flow
Factory
Layout
Process
Simulation
Tool Types
Generic Tool Behavior
RSA/E+ / SysML
Factory
Model
2007-11-05
Dig Cycle
Model
Excavator Test Case
Top-Level System Breakdown
Excavator Operational Domain
Top-Level Context Model
Excavator Operational Domain
Top-Level Use Cases
Excavator Dig Cycle
Activity Diagram
Excavator Modeling & Simulation Environment
GIT Testbed: Tool-Model View
RSA/E+ / SysML
Excavator
Executable
Scenario
Model Center
Objective
Function
Operational Scenario
NX / MCAD Tool
No Magic / SysML
CAD Model
Excavator
System Model
XaiTools
Cost
Model
Optimizer
Reliability
Model
Modelica
Tools
Process Flow
Factory CAD
EM Plant / Factory Flow
Factory
Layout
Process
Simulation
Tool Types
Generic Tool Behavior
RSA/E+ / SysML
Factory
Model
2007-11-05
Dig Cycle
Model
Excavator Analysis/Simulation Models
Problem Definition
Stakeholder
Concerns
Integration of Concerns about System Aspects
Multi-Body Dynamics,
Hydraulics, ...
Behavior Aspects
Analysis
Simulation
Cost Aspects
System
Architectures
Various
Topologies
Analysis
Simulation
Multi-Attribute
Utility Theory
Reliability Aspects
Analysis
Evaluation of
Preferences
Simulation
[Paredis et al. 2007]
Dynamic Physics-Based Behaviors
Hydraulics
Modelica Dynamic Behavioral Model
• Graphically represented via ISO 1219
• Open-source
• High fidelity
• Nonlinear fluid models
• Thermal models
• Hierarchical
• Multi-disciplinary
Hydraulic Circuit Diagram
Pressure-Compensated, Load-Sensing Excavator—ISO 1219 notation
Mechanical
Interface
Engineering
Schematic
Mechanical
Interface
LS
Mechanical
Interface
Mechanical
Interface
SysML Schematic (ibd) — Basic View
Pressure-Compensated, Load-Sensing Excavator
Mechanical
Interface
Engineering
Schematic
Mechanical
Interface
LS
Mechanical
Interface
Mechanical
Interface
SysML Schematic (ibd) — Detailed View
Pressure-Compensated, Load-Sensing Excavator
ibd [Block] Simple Excavator [Hydraulic System Hxx]
Ref: Doc
Exx
[Electrical
System]
Ref: Doc Mxx
[Mechanical
System]
: Diesel Engine
pn: Cummins242
ElecJunction.a
MechJunction.b
FluidJunction.c
MechJunction.s
A1: Actuator
A2: Actuator
M1: Motor
pn: DBL21
MechJunction.r
FluidJunction.a
FluidJunction.b
pn: DBL21
MechJunction.r
FluidJunction.a
FluidJunction.b
pn: DBL21
MechJunction.r
FluidJunction.a
FluidJunction.b
A1: Servo Valve 5/3
A2: Servo Valve 5/3
M1: Servo Valve 5/3
pn: sv1
pn: sv1
pn: sv1
FluidJunction.5
FluidJunction.4
FluidJunction.2
FluidJunction.1
FluidJunction.3
: Pressure Relief Valve
FluidJunction.1
FluidJunction.2
FluidJunction.5
FluidJunction.4
FluidJunction.2
FluidJunction.1
FluidJunction.3
FluidJunction.5
FluidJunction.4
FluidJunction.2
FluidJunction.1
FluidJunction.3
: Air Separator
pn: AS1
FluidJunction
: FD Pump
A1: Check Valve
A2: Check Valve
M1: Check Valve
pn: CHK1
FluidJunction.2
FluidJunction.1
pn: CHK1
FluidJunction.2
FluidJunction.1
pn: CHK1
FluidJunction.2
FluidJunction.1
pn: AXD
FluidJunction.p
FluidJunction.t
MechJunction.s
pn: TNK-2
: Vented Reservoir
FluidJunction.t
FluidJunction.t
Vendor
or Inhouse
PN
Can use a
specific name for
usage in the
schematic, if like
parts exist
2B: Rubber Hose
Mechanical
Interface
pn: Hose1
FluidJunction
FluidJunction
: Heat Exchanger
pn: HXB-3
FluidJunction.h
FluidJunction.c
Engineering
Schematic
FluidJunction.b : Filter
: Thermostatic Control
Valve
pn: STAT3A
FluidJunction.1
FluidJunction.2
pn: Fil1b5
FluidJunction.a
Mechanical
Interface
LS
Mechanical
Interface
Mechanical
Interface
Excavator Case Study
ArmCylR... BucketC...
c...
BucketC...
c...
a b1_l b
r={.655,....
Carriage
b
a
r={-0.164,1....
BucketCyl
sw ingComma...
B
B
bra...
B
bC...
m=...
Base
r={...
n={0,...
in...
Sw
ArmCyl
B
BoomCylL
a Arm b
r={3.654,...
aArm2 b
r={2.97,0....
n={...
Bu...
n_a={...
JointR...
Boo...
S...
brake
boomCommand
Mechanical model of complete...
frame_...
BoomCyl...
BoomCylR
Buc...
m=...
BoomCyl...
cyl3f
c...
c...
Multi-Body System Dynamics Model
(linkages, ...)
armCommand
LS B
P
T
LS B
P
LS B
T
P
T
LS B
P
T
LS B
P
accumulator
constantSpeed
max
ma...
max2
ma...
ma...
max3
ma...
circuitTank
pclsPump
bucketCommand
Dig Cycle
hydraulics
B
max1
T
environment
y
world
p_amb = 101325
T_amb = 288.15
x
p10
r={.52...
Sw ingMotor
n={...
Ar...
bArm
n={...
Bo...
m=...
Boom
a
b
r={7.11,0,0}
b2_r
a
b
r={2.85,1....
aArm1b
r={0.49...
a b4y b
r={0,.21...
BoomCyl...
ArmCylB...
cyl1...
ab1_r b
r={.655,....
BoomCyl...
Sw ingFl...
r={-.92...
a b3 b
r={2.85,1.18,... r={4.22,1.3...
a
b
b b2_l a
cyl2f b4x
bB...
Boo...
Arm...
cyl1_l
Hydraulics Model
B...
B...
m=50
c...
c...
bB...
Native Tool Models: Modelica
Excavator Hydraulics Subsystem
Design Structure Models
Hydraulics Subsystem Simulation Model
Simulation Component Connectivity Aspects
Excavator Modeling & Simulation Environment
GIT Testbed: Tool-Model View
RSA/E+ / SysML
Excavator
Executable
Scenario
Model Center
Objective
Function
Operational Scenario
NX / MCAD Tool
No Magic / SysML
CAD Model
Excavator
System Model
XaiTools
Cost
Model
Optimizer
Reliability
Model
Modelica
Tools
Process Flow
Factory CAD
EM Plant / Factory Flow
Factory
Layout
Process
Simulation
Tool Types
Generic Tool Behavior
RSA/E+ / SysML
Factory
Model
2007-11-05
Dig Cycle
Model
MCAD Tools
NX
Data Mgt. Tools
B. Simulation Building Block
Libraries
Cost
Concepts
Optimization
Concepts
Reliability
Concepts
Solid
Mechanics
Queuing
Concepts
Fluid
Mechanics
D. Context-Specific
Models
Excavator Sys-Level Models
Optimization Model
Objective
Function
Cost
Model
Excel
C. Collective Descriptive Models
Excavator Domain Models
SysML Tools
RSD/E+
...
MagicDraw
Hydraulics
Subsystem
Req. &
Objectives
Dig Site
Boom
Linkages
Dump Trucks
Factory Domain Models
Factory CAD Tools
Collective Factory Model
Factory
CAD
Assembly Lines
AGVs
Buffers
Work Cells
Machines
Optimizers
ModelCenter
Generic Math Solvers
Reliability
Model
Excel
Dig Cycle
Model
Mathematica
Collective Excavator Model
Operations
E. Solvers
Boom Linkage Models
Stress/Deformation Models
Sys Dynamics Solvers
2008-01-25
Modelica
Extensional
Linkage Model
FEA Solvers
Plane Stress
Linkage Model
Ansys
Boom Mfg. Assembly Models
Assembly Process Models
MM1 Queuing
Assy Model
Discrete Event
Assy Model*
Discrete Event Solvers
(Specialized)
eM-Plant /
Factory Flow
Notes & Legend
1) All models shown are SysML models unless otherwise noted.
2) Each authoring & solving tool also has a native model (not shown)
unless otherwise noted.
3) Infrastructure and middleware tools are also present (not shown)--e.g.,
PLM, CM, parametric graph managers (XaiTools etc.), repositories, etc.
A. Descriptive Tools
(Authoring Tools, ...)
Tool interface (via XaiTools, etc.)
Parametric relationship
Composition relationship
Native model relationship (via tool interface, stds., ...)
GIT Testbed: Pattern View (Interoperability Panorama)
* This model is in a GIT prototype tool
(with a schema based on its offline SysML model).
Excavator Modeling & Simulation Environment
Factory & Manufacturing Process
Modeling & Simulation Using SysML
[McGinnis et al. 2007]
SysML State Diagram
SysML Sequence
Diagram
XML Parser
Discrete Event Simulation
Mfg Process & E/M-BOM Associativity
E-BOM (bdd)
M-BOM (bdd)
Mfg. Process (act)
Laser cutting
Boom
Arm1
Side Plate 2
Side Plate 1
Steel Plat
Side Plate 2
Weld arm
Bottom
Plate
Actuator
Hydraulic
Cylinder
Joints
Arm1
Procure actuator
from suppliers
Bottom
Plate
Actuator
Boom
Side Plate 1
Final assembly
of Boom
E/M-BOM = engineering (design) / mfg. bill of materials
Physical Factory Structure
Welding
Dept.
Weld arm
Laser
Cutting Dept.
Laser cutting
Laser cut
Machine
Welding
Machine
Human
Resource
Human
Resource
Procure actuator
from suppliers
Space
Space
Model using SysML bdd,
ibd, and par diagrams
Final assembly
of Boom
Final Assembly
MH = material handling
Space
Human Resource
Tools, MH
Excavator Modeling & Simulation Environment
GIT Testbed: Tool-Model View
RSA/E+ / SysML
Excavator
Executable
Scenario
Model Center
Objective
Function
Operational Scenario
NX / MCAD Tool
No Magic / SysML
CAD Model
Excavator
System Model
XaiTools
Cost
Model
Optimizer
Reliability
Model
Modelica
Tools
Process Flow
Factory CAD
EM Plant / Factory Flow
Factory
Layout
Process
Simulation
Tool Types
Generic Tool Behavior
RSA/E+ / SysML
Factory
Model
2007-11-05
Dig Cycle
Model
MCAD-SysML Interface Scenarios
UGS/Siemens NX
RSD/E+
SysML Model
SysML Model Import
User SysML Model
Manipulation
par [cbam] LinkagePlaneStressModel [Definition view]
L
B
s
ts1
ts2
red = idealized parameter
rib1
ds1
shaft
rib2
sleeve1
sleeve2
B
soi: Linkage
ds2
Leff
effectiveLength:
deformationModel:
LinkagePlaneStressAbb
sleeve1:
width:
l:
wallThickness:
ws1:
outerRadius:
ts1:
rs1:
sleeve2:
par [cbam] LinkageExtensionalModel_800240 [Instance view: state 1.0 - unsolved]
width:
ts2:
soi: FlapLinkage_XYZ-510
wallThickness:
outerRadius:
tf:
totalElongation:
area:
tw:
criticalCrossSection:
length:
ex:
criticalCrossSection:
basic:
uxMax:
nuxy:
basicIsection:
area:
in^2 = 1.125
materialModel:
sxMax:
force:
normalStress:
flangeThickness:
youngsModulus:
totalStrain:
flangeWidth:
material: Steel1020HR
condition:
name:
= “1020 hot-rolled steel”
webThickness:
mechanicalBehaviorModels:
condition: Condition
reaction:
lbs = 10000
description:
= “flaps mid position”
force:
linearElastic:
material:
Model Changes
Propagate to CAD Tool
undeformedLength:
wf:
shaft:
Parametrics
Execution
deformationModel:
rs2:
effectiveLength: in = 5.00
shaft:
Simulation
Execution*
ws2:
name:
youngsModulus:
description:
psi = 30e6
mechanicalBehaviorModels:
linearElastic:
youngsModulus:
reaction:
stressMosModel:
determined:
yieldStress:
psi = 18000
sxMosModel:
MarginOfSafetyModel
allowable:
marginOfSafety:
=?
allowable:
determined:
marginOfSafety:
poissonsRatio:
yieldStress:
uxMosModel:
MarginOfSafetyModel
determined:
allowableInterAxisLengthChange:
allowable:
marginOfSafety:
XaiTools COB Services
Engineering
Analysis Models
* = work-in-process
MCAD Native Model and Tool UIs
UGS/Siemens NX
MCAD Model (Subset) in SysML
RSD/E+
Excavator Modeling & Simulation Environment
GIT Testbed: Tool-Model View
RSA/E+ / SysML
Excavator
Executable
Scenario
Model Center
Objective
Function
Operational Scenario
NX / MCAD Tool
No Magic / SysML
CAD Model
Excavator
System Model
XaiTools
Cost
Model
Optimizer
Reliability
Model
Modelica
Tools
Process Flow
Factory CAD
EM Plant / Factory Flow
Factory
Layout
Process
Simulation
Tool Types
Generic Tool Behavior
RSA/E+ / SysML
Factory
Model
2007-11-05
Dig Cycle
Model
Simulation-Based Design Using SysML
Part 1: A Parametrics Primer
Part 2: Celebrating Diversity by Example
OMG SysML™ is a modeling language for specifying, analyzing, designing,
and verifying complex systems. It is a general-purpose graphical modeling
language with computer-sensible semantics. This Part 1 paper and its Part
2 companion show how SysML supports simulation-based design (SBD) via
tutorial-like examples. Our target audience is end users wanting to learn
about SysML parametrics in general and its applications to engineering
design and analysis in particular. We include background on the
development of SysML parametrics that may also be useful for other
stakeholders (e.g, vendors and researchers).
In Part 1 we walk through models of simple objects that progressively
introduce SysML parametrics concepts. To enhance understanding by
comparison and contrast, we present corresponding models based on
composable objects (COBs). The COB knowledge representation has
provided a conceptual foundation for SysML parametrics, including
executability and validation. We end with sample analysis building blocks
(ABBs) from mechanics of materials showing how SysML captures
engineering knowledge in a reusable form. Part 2 employs these ABBs in a
high diversity mechanical example that integrates computer-aided design
and engineering analysis (CAD/CAE).
The object and constraint graph concepts embodied in SysML
parametrics and COBs provide modular analysis capabilities based on
multi-directional constraints. These concepts and capabilities provide a
semantically rich way to organize and reuse the complex relations and
properties that characterize SBD models. Representing relations as noncausal constraints, which generally accept any valid combination of inputs
and outputs, enhances modeling flexibility and expressiveness. We
envision SysML becoming a unifying representation of domain-specific
engineering analysis models that include fine-grain associativity with other
domain- and system-level models, ultimately providing fundamental
capabilities for next-generation systems lifecycle management.
These two companion papers present foundational principles of
parametrics in OMG SysML™ and their application to simulation-based
design. Parametrics capabilities have been included in SysML to support
integrating engineering analysis with system requirements, behavior, and
structure models. This Part 2 paper walks through SysML models for a
benchmark tutorial on analysis templates utilizing an airframe system
component called a flap linkage. This example highlights how engineering
analysis models, such as stress models, are captured in SysML, and then
executed by external tools including math solvers and finite element
analysis solvers.
We summarize the multi-representation architecture (MRA) method and
how its simulation knowledge patterns support computing environments
having a diversity of analysis fidelities, physical behaviors, solution
methods, and CAD/CAE tools. SysML and composable object (COB)
techniques described in Part 1 together provide the MRA with graphical
modeling languages, executable parametrics, and reusable, modular, multidirectional capabilities.
We also demonstrate additional SysML modeling concepts, including
packages, building block libraries, and requirements-verification-simulation
interrelationships. Results indicate that SysML offers significant promise as
a unifying language for a variety of models-from top-level system models to
discipline-specific leaf-level models.
Citation
Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I
(2007) Simulation-Based Design Using SysML. INCOSE Intl. Symposium,
San Diego.
Part 1: A Parametrics Primer
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-1-peak-primer/
Part 2: Celebrating Diversity by Example
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-2-peak-diversity/
Flap Linkage Mechanical Part
A simple design ... a benchmark problem.
L
B
s
ts1
ts2
red = idealized parameter
rib1
ds1
shaft
rib2
sleeve1
sleeve2
B
ds2
Leff
Background
This simple part provides the basis for a benchmark tutorial for CAD-CAE interoperability and
simulation template knowledge representation. This example exercises multiple capabilities relevant to
such contexts (many of which are relevant to broader simulation and knowledge representation
domains), including:
• Diversity in design information source, behavior, fidelity, solution method, solution tool, ...
• Modular, reusable simulation building blocks and fine-grained inter-model associativity
See the following for further information:
- http://eislab.gatech.edu/pubs/conferences/2007-incose-is-1-peak-primer/
- http://eislab.gatech.edu/pubs/conferences/2007-incose-is-2-peak-diversity/
Design-Simulation Knowledge Graph
Flap Linkage Model—A Benchmark Design-Analysis Example
Design Tools
Analysis Building Blocks
(ABBs)
MCAD Tools
CATIA, NX, Pro/E*, ...
Analysis Templates
of Diverse Behavior & Fidelity
(CBAMs)
1D
Extension
Requirements Tools
DOORS*, MagicDraw,
E+, Rhapsody*, Studio, …
Materials Libraries
In-House, ...
Parts Libraries
In-House*, ...
Legend
Tool Associativity
Object Re-use
Analysis Solvers
(via SMMs)
General Math
Mathematica,
Matlab*,
MathCAD*,
...
FEA
Analyzable Product Model
(APM)
2D
Torsion
1D
FEA
Ansys, Abaqus,
CATIA Elfini*,
MSC Nastran*,
MSC Patran ,
NX Nastran*,
...
* = Item not yet available in toolkit. All
others have working examples 2007-12
Implementation in MagicDraw (WIP)
(see demo including parametrics solving via XaiTools EMF interface)
Enabling Executable SysML Parametrics
GIT XaiTools Prototype Status
SysML parametrics execution via composable objects (COBs) for graph management and math/FEA solving via web services.
COB Solving & Browsing
Plugins Prototyped by GIT
(to SysML vendor tools)
1) Artisan Studio [2/06]
2) EmbeddedPlus [3/07]
3) NoMagic [12/07]
NextGeneration
Spreadsheet
Parametrics plugin
COB Services (constraint graph manager, including COTS solver access via web services)
Composable Objects (COBs)
...
Native Tools Models
...
Ansys
(FEA Solver)
...
L
COTS =
commercial-off-the-shelf
(typically readily available)
FL
TL Mathematica
EA
(Math Solver)
Traditional COTS or
in-house solvers
XaiTools FrameWork™
2007-12 Status
- Examples working from
IS07 Parts 1 & 2 papers
- Prototype being scaled
and hardened for industrial
usage
COB API
Execution via
API messages
or exchange files
XaiTools SysML Toolkit™
SysML Authoring Tools
Design Template Instance: Flap Linkage XYZ-150
Executable parametric model in XaiTools COB browser—an object-oriented spreadsheet.
Computed outputs
(targets and ancillary outputs)
Detailed design inputs
from CAD and requirements
(givens)
Design features
(object-oriented structure)
L
B
s
ts1
ts2
red = idealized parameter
rib1
ds1
shaft
rib2
sleeve1
sleeve2
B
ds2
Leff
Parametric design relationships
(multi-directional)
Contents
• Problem Description
– Characteristics of Mechatronic Systems
– Challenge Team Objectives
• Technical Approach
– Techniques and Testbeds
• Expected Deliverables & Outcomes
• Collaboration Approach
Page 54
Expected Deliverables &
Outcomes—Phase 1
• Solution and supporting models
– Excavator test case models, test suites, …
• MBSE practices used
– System-simulation interoperability (SSI) methodology, …
• Model interchange capabilities
– Tests between SysML tools, CAD/CAE tools, …
• MBSE metrics/value
– See next slide (candidate metrics)
• MBSE findings, issues, & recommendations
– Issue submissions to OMG and vendors, publications, …
• Training material
– Examples, tutorials, …
• Plan forward
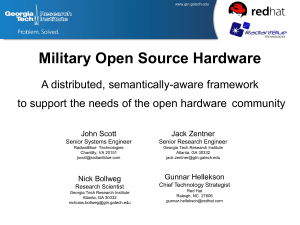
Page 55
Integrated System Design and Analysis Models
Primary Impacts
Enabling Capabilities
Increased Knowledge
Capture & Completeness
Increased
Modularity & Reusability
Increased
Traceability
Reduced
Manual Re-Creation
Increased
& Data Entry Errors
Automation
Reduced
Modeling Effort
Increased
Analysis Intensity
Reduced
Time
Reduced
Cost
Reduced
Risk
Increased
Understanding
Increased
Corporate Memory
Increased Artifact
Performance
Anticipated Benefits of SysML-based Template Approach
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
Precision Information
for the
Model-Based Enterprise
Primary Reporting Venues
• Call for Participation @ IS’07
– Jun 26, 2007 in San Diego
• Phase 1 Status Report @ IW’08 MBSE Workshop #2
– Jan 25, 2008 in Albuquerque
• Phase 1 Final Report @ IS’08
– Jun 15-19, 2008 in Utrecht/Amsterdam
• Misc. reports/updates/publications @ various venues
– OMG meetings, society & vendor conferences, ...
Page 57
Contents
• Problem Description
– Characteristics of Mechatronic Systems
– Challenge Team Objectives
• Technical Approach
– Techniques and Testbeds
• Expected Deliverables & Outcomes
• Collaboration Approach
Page 58
MBSE Challenge—Mechatronics
Open “Call for Participation”
• Systems engineering drivers in commercial settings
– Increased system complexity
– Cross-disciplinary communication/coordination
• Enhancement possibilities based on interest
– Demonstration examples and testbeds
– Shared models and libraries
– Interoperability of tools & frameworks
• Contacts
– Russell Peak [Russell.Peak @ gatech.edu]
– Roger Burkhart [BurkhartRogerM @ JohnDeere.com]
– Sandy Friedenthal [sanford.friedenthal @ lmco.com]
Page 59
Backup Slides
SysML-Related Efforts at Georgia Tech
• SysML Focus Area web page
– http://www.pslm.gatech.edu/topics/sysml/
– Includes links to publications, applications,
projects, examples, etc.
• Selected projects
–
–
–
–
–
Deere: System dynamics (fluid power, ...)
Lockheed: System design & analysis integration
NASA: Enabling technology (SysML, ...)
NIST: Design-analysis interoperability (DAI)
TRW Automotive: DAI/FEA (steering wheel systems ... )
Composable Objects (COB) Requirements & Objectives
Abstract
This document formulates a vision for advanced collaborative engineering environments (CEEs) to aid in the design,
simulation and configuration management of complex engineering systems. Based on inputs from experienced Systems
Engineers and technologists from various industries and government agencies, it identifies the current major challenges
and pain points of Collaborative Engineering. Each of these challenges and pain points are mapped into desired
capabilities of an envisioned CEE System that will address them.
Next, we present a CEE methodology that embodies these capabilities. We overview work done to date by GIT on the
composable object (COB) knowledge representation as a basis for next-generation CEE systems. This methodology
leverages the multi-representation architecture (MRA) for simulation templates, the user-oriented SysML standard for
system modeling, and standards like STEP AP233 (ISO 10303-233) for enhanced interoperability. Finally, we present
COB representation requirements in the context of this CEE methodology. In this current project and subsequent phases
we are striving to fulfill these requirements as we develop next-generation COB capabilities.
Citation
DR Tamburini, RS Peak, CJ Paredis, et al. (2005) Composable Objects (COB) Requirements & Objectives v1.0.
Technical Report, Georgia Tech, Atlanta. http://eislab.gatech.edu/projects/nasa-ngcobs/.
Associated Project
The Composable Object (COB) Knowledge Representation: Enabling Advanced Collaborative Engineering Environments
(CEEs). http://eislab.gatech.edu/projects/nasa-ngcobs/.
Leveraging Simulation Templates & Processes with SysML
Applications to CAD-FEA Interoperability
Abstract
SysML holds the promise of leveraging generic templates and processes across design and simulation. Russell Peak
joins us to give an update on the latest efforts at Georgia Tech to apply this approach in various domains, including
specific examples with a top-tier automotive supplier. Learn how you too may join this project and implement a similar
effort within your own company to enhance modularity and reusability through a unified method that links diverse models.
Russell will also highlight SysML’s parametrics capabilities and usage for physics-based analysis, including integrated
CAD-CAE and simulation-based requirements verification. Go to www.omgsysml.org for background on SysML—a
graphical modeling language based on UML2 for specifying, designing, analyzing, and verifying complex systems.
Speaker Biosketch
Russell S. Peak focuses on knowledge representations that enable complex system interoperability and simulation
automation. He originated composable objects (COBs), the multi-representation architecture (MRA) for CAD-CAE
interoperability, and context-based analysis models (CBAMs)—a simulation template knowledge pattern that explicitly
captures design-analysis associativity. This work has provided the conceptual foundation for SysML parametrics and its
validation.
He teaches this and related material, and is principal investigator on numerous research projects with sponsors
including Boeing, DoD, IBM, NASA, NIST, Rockwell Collins, Shinko Electric, and TRW Automotive. Dr. Peak joined the
GIT research faculty in 1996 to create and lead a design-analysis interoperability thrust area. Prior experience includes
business phone design at Bell Laboratories and design-analysis integration exploration as a Visiting Researcher at
Hitachi in Japan.
Citation
RS Peak (2007) Leveraging Simulation Templates & Processes with SysML: Applications to CAD-FEA Interoperability.
Developing a Design/Simulation Framework, CPDA Workshop, Atlanta.
http://eislab.gatech.edu/pubs/conferences/2007-cpda-dsfw-peak/
Mechatronics Definition
“The synergistic combination of mechanical, electronic, and
software engineering” (Wikipedia)
System
Modeling
Mechanics
Electronics
Sensors
Electromechanics
CAD/CAM
Control
Circuits
Mechatronics
Digital Control
Simulation
Software
Control
Micro-controllers
From Tamburini & Deren, PLM World ’06
http://eislab.gatech.edu/pubs/conferences/2006-plm-world-tamburini/
Page 64
Mechatronics—Open Technology
for Modeling & Frameworks
Systems
Mechanics
• SysML
• STEP AP233
• Open Modelica
• Domain-specific models
• MCAD/CAE
• STEP AP203/214/209 ...
• Part & subsystem models
...
Software
• UML 2
• Real-time middleware
• Communication protocols
• Programming languages & libraries
• Code generators
• IDEs (Eclipse, ...)
...
...
Electronics
• ECAD/CAE
• STEP AP210
• Component models
...
Not shown: Cross-cutting infrastructure (PLM, CM, ...)
Page 65
Modelica Multi-Discipline Models
Page 66