HW2
advertisement

CS316 – Autumn 2013 – 2014
C. Kozyrakis
CS316 Advanced Multi-Core Systems
HW2 – Superscalar Techniques and Cache Coherence
Due Tuesday 11/12/12 at 5PM
(online on Submission portal or in box in front of Gates 303)
Notes
Collaboration on this assignment is encouraged (groups of 3 students)
This HW set provides practice for the exam. Make sure you work on or review ALL
problems in this assignment.
Group: Member1 - _______________ Member2 - ________________ Member3 - ________________
Problem 1: Branch Prediction [9 points]
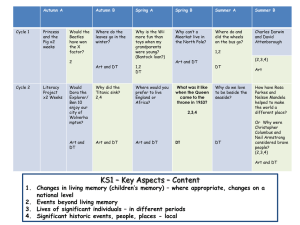
The figure below shows the control flow of a simple program. The CFG is annotated with three
different execution trace paths. For each execution trace, circle which branch predictor (bimodal, local,
or gshare) will best predict the branching behavior of the given trace. More than one predictor may
perform equally well on a particular trace. However, you are to use each of the three predictors exactly
once in choosing the best predictors for the three traces. Assume each trace is executed many times and
every node in the CFG is a conditional branch. The branch history register for the local and gshare
predictors is limited to 4 bits. Bimodal is a common name for a simple branch history table (BHT).
Provide a brief explanation for your answer.
Circle one:
Bimodal
Local
gshare
1
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Circle one:
Bimodal
Local
gshare
Circle one:
Bimodal
Local
gshare
2
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Problem 2: Renaming [6 points]
Consider a MIPS-like instruction set. All instructions are of the form:
LD DST, offset(addr)
SD SRC, offset(addr)
OP DST, SRC1, SRC2
Part A: [3 points]
Computers spend most of their time in loops, so multiple loop iterations are great places to
speculatively find more work to keep CPU resources busy. Nothing is ever easy, though; the compiler
emitted only one copy of that loop’s code, so even though multiple iterations are handling distinct data,
they will appear to use the same registers. To keep register usages multiple iterations from colliding,
we rename their registers. The following code segment shows an example that we would like our
hardware to rename.
Loop: LD
F2,
0(Rx)
I0:
MULTD
F5,
F0,
F2
I1:
DIVD
F8,
F0,
F2
I2:
LD
F4,
0(Ry)
I3:
ADDD
F6,
F0,
F4
I4:
ADDD
F10, F8,
F2
I5:
SD
F4,
0(Ry)
A compiler could have simply unrolled the loop and used different registers to avoid conflicts, but if we
expect our hardware to unroll the loop, it must also do the register renaming. How? Assume your
hardware has a pool of temporary registers (call them T registers, and assume there are 64 of them, T0
through T63) that it can substitute for those registers designated by the compiler. This rename hardware
is indexed by the source register designation, and the value in the table is the T register of the last
destination that targeted that register. (Think of these table values as producers, and the src registers are
the consumers; it doesn’t much matter where the producer puts its result as long as its consumers can
find it.) Consider the code sequence. Every time you see a destination register in the code, substitute
the next available T, beginning with T9. Then update all the src registers accordingly, so that true data
dependences are maintained. Show the resulting code. (Hint: See following sample)
I0:
LD
T9,
0(Rx)
I1:
MULTD
T10, F0,
T9
3
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Part B: [3 points]
Part A explored simple register renaming: when the hardware register renamer sees a source register, it
substitutes the destination T register of the last instruction to have targeted that source register. When
the rename table sees a destination register, it substitutes the next available T for it. But superscalar
designs need to handle multiple instructions per clock cycle at every stage in the machine, including the
register renaming. A simple scalar processor would therefore look up both src register mappings for
each instruction, and allocate a new destination mapping per clock cycle. Superscalar processors must
be able to do that as well, but they must also ensure that any dest-to-src relationships between the two
concurrent instructions are handled correctly. Consider the following sample code sequence:
I0:
I1:
I2:
I3:
MULTD
ADDD
ADDD
DIVD
F5,
F9,
F5,
F2,
F0,
F5,
F5,
F9,
F2
F4
F2
F0
Assume that we would like to simultaneously rename the first two instructions (2-way superscalar).
Further assume that the next two available T registers to be used are known at the beginning of the
clock cycle in which these two instructions are being renamed. Conceptually, what we want is for the
first instruction to do its rename table lookups, and then update the table per its destination’s T register.
Then the second instruction would do exactly the same thing, and any inter-instruction dependency
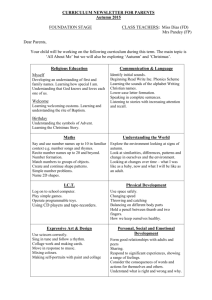
would thereby be handled correctly. But there’s not enough time to write the T register designation into
the renaming table and then look it up again for the second instruction, all in the same clock cycle. That
register substitution must instead be done live (in parallel with the register rename table update). Figure
2.1 shows a circuit diagram, using multiplexers and comparators, that will accomplish the necessary
on-the-fly register renaming. Your task is to show the cycle-by-cycle state of the rename table &
destination / sources register mappings for every instruction of the code. Assume the table starts out
with every entry equal to its index (T0 = 0; T1 = 1….).
Figure 2-1. Rename table and on-the-fly register substitution logic for superscalar machines. (Note:
“src” is source, “dst” is destination.)
4
CS316 – Autumn 2013 – 2014
C. Kozyrakis
You only need to fill in mappings for registers that have been renamed from their starting values
(e.g. no need to write in F60=T60, but if F60=T3 that needs to be filled in). Not all fields may be
used.
Cycle 0:
Architectural
F
F
F
F
F
F
F
Machine
T
T
T
T
T
T
T
Instruction I0
dst =
src1 =
src2 =
Instruction I1
dst =
src1 =
src2 =
Machine
T
T
T
T
T
T
T
Instruction I2
dst =
src1 =
src2 =
Instruction I3
dst =
src1 =
src2 =
Cycle 1:
Architectural
F
F
F
F
F
F
F
5
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Problem 3: Coherence [30 points]
Part A: Single processor coherence [5 points]
A processor such as the PowerPC G3, widely deployed in Apple Macintosh systems, is primarily
intended for use in uniprocessor systems, and hence has a very simple MEI cache coherence protocol.
MEI is the same as MESI, except the Shared (S) state is omitted. Identify and discuss one reason why
even a uniprocessor design should support cache coherence. Is the MEI protocol of the G3 adequate for
this purpose? Why or why not? (Hint: think about Direct Memory Access (DMA))
6
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Part B: MOESIF cache coherence protocol [10 points]
Many modern systems use cache-to-cache transfer as a way to avoid penalties of going off-chip for a
memory access. MOESIF cache coherency protocol extends from the MESI protocol, where the
semantics of the additional states are as follows: O state indicates that the line is shared-dirty: i.e.,
multiple copies may exist, but the other copies are in the S state, and the cache that has the line in the O
state is responsible for writing the line back if it is evicted. F state indicates that the line is shared-clean
but multiple copies may exist in the S state and this cache is responsible for a transfer on fill request.
Fill in the table below for actions on every event trigger. If nothing needs to be done, write in “Do
nothing.” If an event is invalid for a given state, write in “Error.”
Current
State s
Event and Local Coherence Controller Responses and Actions (s’ refers to next state)
Local Read
Local Write Local
Bus Read
Bus Write
Bus
Eviction
Upgrade
Invalid (I)
Shared (S)
Forwarding
(F)
Exclusive
(E)
Owned (O)
Modified
(M)
7
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Part C: Snoopy Coherence [5 points]
Assuming a processor frequency of 1 GHz, a target CPI of 2, a per-instruction level-2 cache miss rate
of 1% per instruction, a snoop-based cache coherent system with 32 processors, and 8-byte address
messages (including command and snoop addresses), compute the inbound and outbound snoop
bandwidth required at each processor node.
8
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Part D: Memory Consistency [10 points]
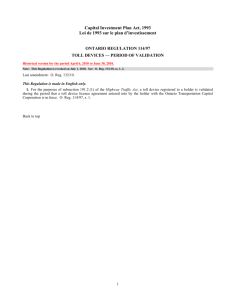
Consider a simple multicore processor using a snoopy MSI cache coherence protocol. Each processor
has a single, private cache that is direct-mapped with four blocks each holding two words. The initial
cache state of the system is shown in the figure below. To simplify the illustration, the cache-address
tag contains the full address.
P0
B0
B1
B2
B3
P1
Coherency Address
State
tag
I
100
S
108
M
110
I
118
B0
B1
B2
B3
P2
Coherency Address
State
tag
I
100
M
128
I
110
S
118
B0
B1
B2
B3
Coherency Address
State
tag
S
120
S
108
I
110
I
118
Reads and writes will experience stall cycles depending on the state of the cache line:
CPU read and write hits generate no stall cycles
CPU read and write misses generate Nmemory and Ncache stall cycles if satisfied by memory and
cache, respectively
CPU write hits that generate an invalidate incur Ninvalidate stall cycles
A write-back of a block, due to either a conflict or another processor’s request to an exclusive
block, incurs an additional Nwriteback stall cycles
The exact cycle count for each event is given in the table below:
Parameter Cycles
100
Nmemory
40
Ncache
15
Ninvalidate
10
Nwriteback
Sequential consistency (SC) requires that all reads and writes appear to have executed in some total
order. This may require the processor to stall in certain cases before committing a read or write
instruction. Consider the following code sequence:
write A
read B
where the write A results in a cache miss and the read B results in a cache hit. Under SC, the processor
must stall read B until after it can order (and thus perform) write A. Simple implementations of SC will
stall the processor until the cache receives the data and can perform the write. Weaker consistency
models relax the ordering constraints on reads and writes, reducing the cases that the processor must
stall. The Total Store Order (TSO, or Processor Order) consistency model requires that all writes
appear to occur in a total order but allows a processor’s reads to pass its own writes. This allows
processor to implement write buffers that hold committed writes that have not yet been ordered with
respect to other processors’ writes. Reads are allowed to pass (and potentially bypass) the write buffer
in TSO (which they could not do under SC). Assume that one memory operation can be performed per
cycle and that operations that hit in the cache or that can be satisfied by the write buffer introduce no
stall cycles. Operations that miss incur the latencies stated above. How many stall cycles occur prior to
each operation for both the SC and TSO consistency models for the cases listed below? Show your
work; a correct answer without any work shown will receive no credit.
9
CS316 – Autumn 2013 – 2014
Instructions
P0: write 110 80
P0: read 108
C. Kozyrakis
Stall cycles
SC
TSO
P0: write 100 80
P0: read 108
SC
TSO
P0: write 110 80
P0: write 100 90
SC
TSO
P0: write 100 80
P0: write 110 90
SC
TSO
P0: read 118
P0: write 110 80
SC
TSO
10
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Problem 4: Instruction Flow and Branch Prediction [30 points]
This problem investigates the effects of branches and control flow changes on program performance for
a scalar pipeline (to keep the focus on branch prediction). Branch penalties increase as the number of
pipeline stages increases between instruction fetch and branch resolution (or condition and target
resolution). This effect of pipelined execution drives the need for branch prediction. This problem
explores both static branch prediction in Part C and dynamic branch prediction in Part D. For this
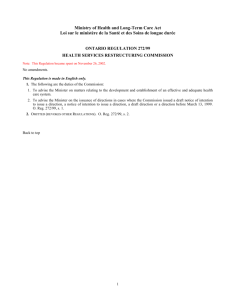
problem the base machine is a 5-Stage pipeline.
The 5-Stage Pipeline without Dynamic Branch Prediction
Execution Assumptions:
Br. Corr.
• unconditional branches Address
execute in the decode
Fetch
stage
Addr.
Sequential
• conditional branches
Addr. Calc.
execute in the execute
Instruction Fetch
stage
• Effective address calculation is performed
Instruction Decode
in the execute stage
• All memory access is
performed in the memory access stage
Execute
• All necessary forwarding paths exist
• The register file is read
Memory Access
after write
Instruction
Cache
Instructions
The fetch address is a choice
between the sequential address
generation logic and the branch
correction logic. If a mispredicted
branch is being corrected the
correction address is chosen over the
sequential address for the next fetch
address.
Write Back
Part A: Branch Penalties. [2 points]
What are the branch penalties for unconditional and conditional branches?
Unconditional ______________ Conditional _______________
11
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Part B: No Branch Prediction. [4 points]
This problem will use the insertion sort program. An execution trace, or a sequence of executed basic
blocks, is provided for this problem. A basic block is a group of consecutive instructions that are
always executed together in sequence.
Example Code: Insertion Sort
BB Line#
Label
Assembly_Instruction
Comment
1
1
2
3
main:
addi r2,
addi r3,
add r4,
r0,
r0,
r0,
ListArray
ListLength
r0
r2 <- ListArray
r3 <- ListLength
i = 0;
2
4
loop1:
bge r4,
r3,
end
3
4
5
6
loop2:
add r5,
ble r5,
r4,
r0,
r0
cont
5
7
8
9
10
addi
lw
lw
bge
r6,
r7,
r8,
r7,
r5, -1
r5(r2)
r6(r2)
r8, cont
while (i < Length)
{
j=i;
while (j > 0)
{
k=j-1;
temp1 = ListArray[j];
temp2 = ListArray[k];
if (temp1 >= temp2) break;
6
11
12
13
14
sw
sw
addi
ba
r8, r5(r2)
r7, r6(r2)
r5, r5, -1
loop2
7
8
15
16
cont:
17
18
end:
addi r4, r4,
ba loop1
lw
ba
r1,
r1
ListArray[j] temp2;
ListArray[k] temp1;
j--;
}
1
i++;
}
(sp)
r1 <- Return Pointer
Execution Trace: Sequence of Basic Blocks Executed:
123 45723 456 456 4723 456 45723
456
456
45728
[Hint: An alternate way to represent the same execution trace above is to use the sequence of branch
instructions, both conditional and unconditional (i.e. ba), executed.]
12
CS316 – Autumn 2013 – 2014
C. Kozyrakis
1. Fill in the branch execution table with an N for not taken and a T for taken. This table is recording
the execution pattern for each (static) branch instruction. Use the execution trace on the previous page.
Branch Execution - Assume No Branch Prediction:
Branch Instruction No.
(i.e. Line#)
Branch Instruction Execution (dynamic executions of each branch)
1
2
3
4
5
6
7
8
9
10
4
6
10
14
16
18
Using the branch execution table above to calculate the statistics requested in the following table.
Branch Execution Statistics:
Branch Instr. No.
Times Executed
Times Taken
Times Not Taken
% Taken
%Not Taken
4
6
10
14
16
18
2. How many cycles does the trace take to execute (include all pipeline fill and drain cycles)? [Hint:
you don’t need to physically simulate the execution trace, just compute the cycle count.]
3. How many cycles are lost to control dependency stalls?
13
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Part C: Static Branch Prediction. [8 points]
Static branch prediction is a compile-time technique of influencing branch execution in order to reduce
control dependency stalls. Branch opcodes are supplemented with a static prediction bit that indicates a
likely direction during execution of the branch. This is done based on profiling information, ala that in
Part B. For this part of Problem 4, new branch opcodes are introduced:
bget - branch greater than or equal with static predict taken
bgen - branch greater than or equal with static predict not-taken
blet - branch less than or equal with static predict taken
blen - branch less than or equal with static predict not-taken
Static branch prediction information is processed in the decode stage of the 5-stage pipeline. When a
branch instruction with static predict taken (i.e. bget) is decoded the machine predicts taken.
Conversely, when a branch instruction with static predict not-taken (i.e. bgen) is decoded the machine
predicts not-taken.
1. [6 points] Pretend you are the compiler, rewrite each conditional branch instruction in the original
code sequence using the new conditional branch instructions with static branch prediction encoded.
2. [2 points] Assuming the same execution trace, what is the new total cycle count of the modified
code sequence incorporating static branch prediction instructions. Indicate the resultant IPC.
14
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Part D: Dynamic Branch Prediction. [16 points]
This part examines the use of a Branch Target Buffers (BTB) for performing dynamic branch prediction on the 5-Stage scalar pipeline.
The 5-Stage Pipeline without Dynamic Branch Prediction
The branch target buffer
(BTB) in the 5-Stage pipeline contains 4 entries and
is direct mapped. The
BTB caches all branch and
jump instructions. It stores
the branch fetch addresses
along with the branch target addresses. If the
branch fetch address “hits”
in the BTB, the target
address in the BTB is used
if the branch is predicted
taken.
The BTB is updated
immediately after
prediction in the
instruction fetch pipe
stage, i.e. assuming speculative update.
BTB
Br. Corr.
Address
Sequential
Addr. Calc.
Fetch
Addr.
Instruction Fetch
Instruction Decode
Execute
Memory Access
Write Back
15
Instruction
Cache
Instructions
The BTB is accessed simultaneously
with the instruction cache. If the
BTB hits and returns a branch target
address and the branch is predicted
taken, then the next fetch address is
the target address from the BTB. If
the branch is predicted not taken or
the BTB misses, then the sequential
address is the next fetch address.
CS316 – Autumn 2013 – 2014
C. Kozyrakis
1. [6 points] Assume each entry of the BTB employs a 2-bit saturating up/down counter (initialized to
the state 00) that maintains branch history. The BTB uses the following prediction algorithm: 00 - Not
taken, 01 - Not taken, 10 - Taken, 11 - Taken. Fill in the table below with the state of the BTB after
each dynamic branch instruction is executed. Use I[2:1] as the address of an instruction to determine
which BTB entry is referenced, where I is the instruction number in its binary form. (2nd and 3rd bits
resp.)
Dynamic
Branches
Executed
BTB Entry #0
Stat.
Br #
Tar.
Instr#
Hist.
bits
BTB Entry #1
Stat.
Br #
Tar.
Instr#
Hist.
bits
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
16
BTB Entry #2
Stat.
Br #
Tar.
Instr#
Hist.
bits
BTB Entry #3
Stat.
Br #
Tar.
Instr#
Hist.
bits
CS316 – Autumn 2013 – 2014
C. Kozyrakis
2. [4 points] Fill in the table below to evaluate how accurately each branch is predicted.
Branch Instr.
Number
1
2
Branch Instruction Execution
3
4
5
6
7
8
Taken or Not
4
Pred. Direction
Correct? (Y/N)
Taken or Not
6
Pred. Direction
Correct? (Y/N)
Taken or Not
10
Pred. Direction
Correct? (Y/N)
Taken or Not
14
Pred. Direction
Correct? (Y/N)
Taken or Not
16
Pred. Direction
Correct? (Y/N)
Taken or Not
18
Pred. Direction
Correct? (Y/N)
17
9
10
CS316 – Autumn 2013 – 2014
C. Kozyrakis
3. [2 points] Compare and contrast the effectiveness and efficiency of the dynamic branch predictor of
Part D with the static branch predictor of Part C.
4. [4 points] Argue whether the Two-level Adaptive Branch Prediction Scheme [Yeh & Patt]
can improve branch prediction accuracy for the given execution trace? Or for any execution of the
insertion-sort routine?
18
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Problem 5: Instruction Scheduling in the Metaflow Processor [25 points]
This problem will help you understand the details of scheduling and management in a micro-dataflow
example. The Metaflow architecture was first implemented in the Sparc Lightning processor to help
exploit instruction-level parallelism [Popescu et al. IEEE Micro 1991]. The architecture utilizes an
interagted instruction-shelving (DRIS) structure to execute instructions out of order. To exploit
instruction-level parallelism while maintaining consistency, the DRIS forms a unified structure for
register renaming, dependency checking, result forwarding, and ROB. In this problem, you will
explore the details of the DRIS structure and understand how it functions by tracking the state of the
DRIS through a sample code trace. The DRIS entry parameters and operations are explained in the
IEEE Micro1991 paper distributed along with this assignment.
To simplify the problem, we are going to trace the execution of the Metaflow processor abstractly. For
step 1, show the state of the DRIS after you have issued the instruction trace (from PC=101 to PC=111)
into DRIS starting with entry 1. In step 2, show the state of DRIS after all instructions that are ready to
execute at the end of step 1 have been executed and their results forwarded the appropriate locations in
DRIS. In step 3, show the state of the DRIS and register file after all instructions that are ready to
complete at the end of step 2 have been retired. In the subsequent steps, repeat the operations in step 2
and 3 until all instructions have retired out of the DRIS. You can attach extra tables if necessary.
Note: don’t forget to consider memory dataflow dependences of load and store instructions. Also,
assume load and store addresses are in register indirect format and thus do not require separate
computation. Branch instructions are predicted not taken at first so the execution proceeds down the
sequential path speculatively until the branch is resolved. Assume no internal memory by-passing, i.e
loads and store must go to memory.
PC= 101:
102:
103:
104:
105:
106:
107:
108:
mul
add
sub
sw
mul
sub
lw
bne
r1, r1, r3
r3, r1, r2
r4, r4, r2
(r4), r1
r1, r2, r4
r3, r1, r3
r1, (r4)
r1, r4, (115)
109: sub r2, r2, r4
110: mult r3, r1, r3
111: add r4, r3, r1
; r1 r1 * r3
; r3 r1 + r2
; r4 r4 – r2
; mem[r4] r1
; r1 r2 * r4
; r3 r1 – r3
; r1 mem[r4]
; branch to 115
; if r1 != r4
; r2 r2 – r4
; r3 r1 * r3
; r4 r3 + r1
…………..
115: halt
19
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 1
Register File
r1
r2
5
3
DRIS
Source Operand 1
Tag
1
r3
2
r4
1
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Disp- Func. Exec- Program
atched Unit cuted Counter
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Note:
Please use different color pens to show the state values that changes and don’t change from step to step.
For each new step, first copy the state unchanged to the new sheet and then make the changes with a
different color pen.
Use {add, sub, mul, br, lw, and sw} for the function unit column.
In this problem, the dispatch column is effectively the same as the executed column and do not need to
be filled.
20
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 2
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
21
Disp- Func. Exec- Program
atched Unit cuted Counter
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 3
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
22
Disp- Func. Exec- Program
atched Unit cuted Counter
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 4
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
23
Disp- Func. Exec- Program
atched Unit cuted Counter
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 5
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
24
Disp- Func. Exec- Program
atched Unit cuted Counter
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 6
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
25
Disp- Func. Exec- Program
atched Unit cuted Counter
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 7
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
26
Disp- Func. Exec- Program
atched Unit cuted Counter
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 8
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
27
Disp- Func. Exec- Program
atched Unit cuted Counter
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 9
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
28
Disp- Func. Exec- Program
atched Unit cuted Counter
CS316 – Autumn 2013 – 2014
C. Kozyrakis
Step 10
Register File
r1
r2
DRIS
Source Operand 1
Tag
1
r3
r4
Source Operand 2
Locked Reg. ID Locked Reg. ID Latest
Destination
Reg. Content
2
3
4
5
6
7
8
9
10
11
12
13
14
15
29
Disp- Func. Exec- Program
atched Unit cuted Counter