daconf15_liu - University of Maryland
advertisement

A Random Subgrouping Scheme for
Ensemble Kalman Filters
Yun Liu
Dept. of Atmospheric and Oceanic Science, University of Maryland
Atmospheric and oceanic sciences and Center for Climatic Research, UWMadison
Collaborators: X. Rong, Z. Liu, S. Wu, S. Zhang, R. Jacob, F. Lu
Outline
• Background
• A Random Subgrouping Scheme for
Ensemble Kalman Filters
• OSSE test results
Ensemble Kalman Filter
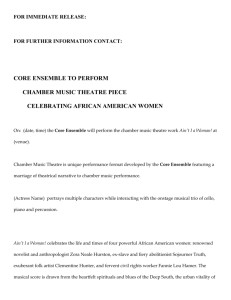
Ensemble Kalman filter is a Mont Carlo approximation of
Kalman Filter. It samples the probability density function (PDF)
of forecast and analysis using ensemble. (Evenson 1994).
Before Ensemble Kalman filter
After Ensemble Kalman filter
Stochastic filter and Deterministic filter
Stochastic filter (EnKF) vs Deterministic filter (EnSRF)
EnKF: the observations are treated as random variables
that are perturbed using their uncertainties (Burgers et al
1998).
Xia = Xif + K(yi - HXif )
EnSRF: transform the forecast ensemble to match the
analysis and its theoretical uncertainty from Kalman filter
(Anderson 2001, Bishop et al. 2001, Whitaker and Hamill
2002, Tippett et al 2003, Hunt et al… ).
xa ' = Ax f '
P a = (1- KH )P f
xa = x f + K(yo - Hx f )
{
or
} ® Pa
xa ' = x f ' A
Error sources for Ensemble Kalman filters
Sampling error from limited ensemble size
EnKF
EnSRF
Forecast
Yes
Yes
observation Yes
No
EnSRFs perform better than EnKF for a linear system,
especially when ensemble size is small.
Linear Hypothesis:
error from Non-Gaussian PDF (in nonlinear system)
EnKF performs better than EnSRF
Lorenz63 model
Experiment design:
• The model time resolution 0.01
• The observation frequency 0.1
• The observation error standard
derivation (2.0, 2.0,2.0) for x, y, z,
respectively
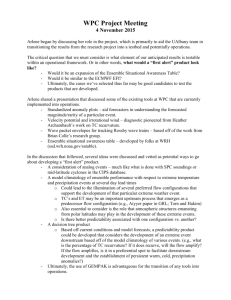
A case study for Lorenz63 model
outlier
The error evolution of 80-member ensemble EnKF / EAKF
assimilation of Lorenz63 model.
Individual members (black lines) and the ensemble means (red lines)
EnKF vs EAKF for Lorenz63
• The EAKF performs worse
when the ensemble size
increases.
• The outlier effect becomes
severer with the increase of
ensemble size.
Kurtosis is an index
for the presence of
outliers
å(x - x )
Kur =
(å (x - x ) )
4
i
i
2 2
i
i
Challenge
• The extreme outlier problem arising from nonGaussian PDFs is a challenge for an ensemble
Kalman filter, especially for EnSRFs with a large
ensemble size (Lawsen and Hansen 2004,
Anderson 2010, Lei et al. 2010)
Previous works
• Sakov and Oke (2008) a random
transformation.
xa ' = x f ' A ® P a = (1- KH )P f
xa ' = x f ' AT
TT T = I, TI = I
T is an arbitrary orthonormal mean-preserving
matrix
• Anderson (2010) rank
histogram filter
A random subgrouping technique on EnSRF (sEnSRFn)
The sEnSRFn randomly divide the full ensemble into sub-ensembles of
equal size of n at each analysis step.
All sub-ensembles are updated independently using a deterministic
filter algorithm.
The random subgrouping technique removes the effect of extreme
outliers from two aspects:
• the smaller ensemble size for each sub-ensemble limits the
divergence of an outlier from the ensemble mean;
• the random subgrouping prevents an outlier persistent.
The flow charter EnKF/ EnSRF/ sEnSRF5
Test in simple model
Model: Lorenz63 model
Observation: Adding random errors onto the “truth” with a
standard derivation (2, 2, 2)
Observation time interval: 0.1 (10 time steps)
Simulation length: 50 time units (500 analysis steps)
500 sets of experiments are performed use EnKF, EAKF and
sEAKFn schemes. For each sets of experiment, all three schemes
use the identical initial conditions and observations
A case study
• The error evolution of 80-member ensemble EnKF / EAKF/sEAKF5
assimilation of Lorenz63 model.
• Individual members (black lines) and the ensemble means (red lines)
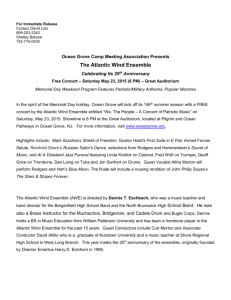
• The ensemble kurtosis (a) and
analysis RMSE (b) for different
ensemble size averaged from 500
sets of experiments.
• The x-axis represents the sample
sizes for subgroups of sEAKFn (EnKF,
EAKF). The solid lines are for sEAKFn
assimilation except the black line,
which indicats the kurtosis of 3 for a
Gaussian white noise distribution.
The dash lines are for the
simulations with subgrouping
scheme but no randomizing.
• The kurtosis (RMSE) from EAKF for
an ensemble size of 80 and 160 are
19.0 (0.84) and 67.0 (1.33) that are
too large to be shown on the plots.
assimilation time interval
• The ensemble kurtosis (a) and
analysis RMSE ratio (b) for different
assimilation schemes with ensemble
size of 80 and different observation
time intervals. The results are
averaged from 500 sets of
experiments. The x-axis represents
the observation time intervals for the
experiments.
• (a) The ensemble kurtosis of y for
different assimilation schemes. The
blue dot line is for EAKF; the green
star line is for EnKF and the red circle
line is for sEAKFn with best subensemble size.
• (b) The RMSE ratio between sEAKFn
with best sub-ensemble size and
corresponding EAKF(blue dot line) or
EnKF ( green star line).
Random subgrouping EnKF
• The ensemble kurtosis
(a) and analysis RMSE
(b) of sEnKFn and EnKF
for different ensemble
size averaged from 500
sets of experiments.
Test in an intermediate model: QG-slab ocean model
• Ψ is the streamfuction, htopo the topography ϰ the
coupling coefficient for the QG atmosphere, T the ocean
temperature, α the coupling coefficient for the ocean.
• H(y) is the mixture layer depth and Qw the solar forcing
for the ocean, both of them using symmetric patterns in
two hemispheres.
• Resolution: 64*54 Gaussian grid, 0.5 hour interval
• Observation for ψ : error scale ~ 10e6, assimilation
interval: 12 hour
• Ensemble size: 80
Outliers in QG-slab model with EAKF
The ensemble kurtosis of ψ from a case study (EAKF and EAKF40), which share the
identical initial condition and observation.
The contour interval is 1.0 with the minimum value of 5.0.
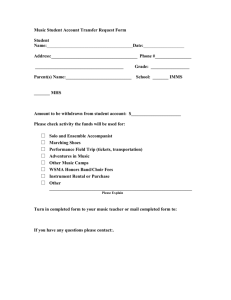
Case study
• The analysis RMSE
difference of ψ
between different
assimilation schemes.
• (a) The analysis RMSE
difference between
EAKF and sEAKF40
from one set of
experiments, which
share the identical
initial condition and
observation.
• (b) The analysis RMSE
between EAKF and
EnKF from same set of
experiment of (a).
RMSE decrease with new scheme
• The analysis RMSE difference of ψ between EAKF and
sEAKF40 averaged over 32 sets of experiments. The
green solid contours indicate 95% confidence level.
Conclusion
• Ensemble Kalman filters can be divided into two categories:
stochastic and deterministic. Both types of filters suffer from the
problem of generating extreme outliers in the ensembles
produced in a nonlinear system.
• A sEnSRF scheme is developed to solve the outlier problem with a
random subgrouping. The sEnSRF randomly divides the full
ensemble into sub-ensembles of equal size at each analysis step.
All sub-ensembles are updated independently using a
deterministic filter algorithm
• The random subgrouping technique removes the effects of
extreme outliers in two ways: the smaller ensemble size for each
sub-ensemble limits the deviation of an outlier from the
ensemble mean and the random subgrouping prevents the longterm persistence of an outlier
• Test results on both simple model and intermediate model show
that the new scheme significantly improves filtering performance,
compared to the traditional stochastic and deterministic filtering
algorithms.
Thank you!