ACKNOWLEDGMENTS First, I would like to express my appreciation
advertisement

DATA ACQUISITION FOR SPEECH RECOGNITION SYSTEM
Mitul Shah
B.E., Dharmsinh Desai University, India, 2008
PROJECT
Submitted in partial satisfaction of
the requirements for the degree of
MASTER OF SCIENCE
in
ELECRICAL AND ELECTRONIC ENGINEERING
at
CALIFORNIA STATE UNIVERSITY, SACRAMENTO
FALL
2010
DATA ACQUISITION FOR SPEECH RECOGNITION SYSTEM
A Project
by
Mitul Shah
Approved by:
__________________________________, Committee Chair
Jing Pang, Ph. D.
____________________________
Date
ii
Student: Mitul Shah
I certify that this student has met the requirements for format contained in the University
format manual, and that this project is suitable for shelving in the Library and credit is to
be awarded for the project.
___________________________, Graduate Coordinator
Preetham Kumar, Ph. D.
Department of Electrical and Electronic Engineering
iii
__________________
Date
Abstract
of
DATA ACQUISITION FOR SPEECH RECOGNITION SYSTEM
by
Mitul Shah
The Data Acquisition System is the integral part of the speech recognition system.
The speech recognition system is used for applications such as voice dialing and speechto-text conversion. Acquiring the human voice and storing the data is very important
aspect of that system. The Data Acquisition System provides exactly the same
functionality.
This project report gives the background information for the analog signal
sampling techniques, Analog-to-Digital converter (ADC). It discusses the AVR
ATmega32A microcontroller’s internal ADC interfacing with the microphone using the
pre-amplifier circuit. After the speech is sampled through the internal ADC of the
Atmega32A, the project report gives the description of Serial Peripheral Interface (SPI)
and a serial flash interfacing with the SPI port of the AVR. Finally, the Pulse-width
Modulation is described in the final section. The PWM waveform from the AVR
ATmega32A is then passed through the low-pass filter and then through the power
amplifier to regenerate the original signal.
iv
The AVR STK500 is the development board used to implement the hardware.
The software for the AVR microcontroller is written with C programming language. The
project is successfully demonstrated using this board.
_______________________, Committee Chair
Jing Pang, Ph. D.
__________________
Date
v
ACKNOWLEDGMENTS
First, I would like to express my appreciation for Dr. Jing Pang. She provided me
with an excellent opportunity to work on this project, which provided a great exposure to
the field of audio processing and microcontrollers. I thank her for providing all resources,
help and guidance needed to complete the project successfully. Her knowledge and
expertise in the field was very helpful for me to understand the project and finishing it
successfully. She provided me absolutely unmatched guidance for audio processing, the
AVR STK500 development platform and testing strategies. Without her support, I would
not have completed the work successfully as I have done.
I would like to thank the Atmel Corporation for providing such great application
notes on the various features such as Pulse Width Modulation, sound recording system,
the Serial Peripheral Interface using the AVR devices and STK500. I want to show
appreciation to the engineering forum www.avrfreaks.com for providing me an excellent
discussion platform on the topic related to my project.
I would like to thank Dr. Preetham Kumar for reviewing my report and providing
valuable suggestions that helped me to improve my project report. I would like to thank
my parents and friends for providing me strength and motivation during the critical
phases of this project in last one year. Finally, I would like to thank Department of
Electrical and Electronics Engineering at California State University, Sacramento for
providing me facilities and laboratory services which prove very critical in completing
my project successfully.
vi
TABLE OF CONTENTS
Page
Acknowledgments.............................................................................................................. vi
List of Tables ..................................................................................................................... ix
List of Figures ..................................................................................................................... x
Chapter
1. INTRODUCTION ........................................................................................................ 1
1.1 Introduction to Data Acquisition for Speech Recognition System ................... 1
1.2 Background of the Project ................................................................................ 1
1.3 Organization of Project Report ......................................................................... 3
2. SYSTEM OVERVIEW ................................................................................................ 5
2.1 Introduction ....................................................................................................... 5
2.2 Hardware Implementation ................................................................................ 5
2.3 AVR STK500 Development Platform .............................................................. 8
2.4 Software Organization .................................................................................... 10
3. AUDIO SAMPLING .................................................................................................. 12
3.1 Analog to Digital Conversion ......................................................................... 12
3.2 Hardware ......................................................................................................... 15
3.3 Software .......................................................................................................... 17
4. DATA STORAGE USING SERIAL FLASH MEMORY ......................................... 21
4.1 Serial Peripheral Interface in AVR ATMEGA32A ........................................ 21
4.2 Serial Peripheral Interface in the DataFlash W25Q80BV .............................. 25
4.3 Software for the DataFlash Access ................................................................. 27
4.4 Write to DataFlash .......................................................................................... 28
4.5 Erase Operation............................................................................................... 30
4.6 Read Data from the DataFlash ........................................................................ 32
5. AUDIO GENERATION USING PWM ..................................................................... 33
5.1 Pulse-width Modulation Waveform ............................................................... 33
vii
5.2 AVR ATmega32A Setup for PWM Mode of Operation ................................ 35
5.3 Software Setup for Play Back ......................................................................... 37
5.4 Hardware Circuit............................................................................................. 38
6. CONCLUSION ........................................................................................................... 41
6.1 Conclusion ...................................................................................................... 41
6.2 Future Work .................................................................................................... 42
Appendix - Implementation Software ............................................................................... 43
References ......................................................................................................................... 50
viii
LIST OF TABLES
Page
1. Table 4.1 Data direction ............................................................................................. 22
2. Table 4.2 SPI Control Register in ATmega32A ......................................................... 23
3. Table 4.3 CPOL and CPHA states, functionality and SPI mode of operation............ 24
ix
LIST OF FIGURES
Page
1. Figure 2.1 Block diagram ............................................................................................. 5
2. Figure 2.2 Detailed hardware interface with AVR ATmega32a .................................. 7
3. Figure 2.3 AVR STK500 components ......................................................................... 8
4. Figure 2.4 AVR STK500 block diagram ..................................................................... 9
5. Figure 2.5 Software flow chart ................................................................................... 10
6. Figure 3.1 Analog signal converted into a time discrete signal .................................. 12
7. Figure 3.2 Illustration of proper and improper sampling of a sinusoidal signal ......... 14
8. Figure 3.3 Microphone pre-amplifier ......................................................................... 16
9. Figure 3.4 Record function flow chart ........................................................................ 17
10. Figure 3.5 ADC running in single conversion mode .................................................. 19
11. Figure 4.1 Master – Slave interconnection for SPI data transfer ................................ 21
12. Figure 4.2 The SPI data transfer format for CPHA = 0 (Mode 0 and 2) .................... 25
13. Figure 4.3 The SPI data transfer format for CPHA = 1 (Mode 1 and 3) .................... 25
14. Figure 4.4 Pin diagram of the DataFlash W25Q80BV ............................................... 26
15. Figure 4.5 Write to DataFlash flow chart ................................................................... 29
16. Figure 4.6 Chip erase function flow chart .................................................................. 31
17. Figure 4.7 DataFlash read flow chart .......................................................................... 32
18. Figure 5.1 A typical PWM waveform......................................................................... 33
19. Figure 5.2 Frequency spectrum of a typical PWM waveform .................................... 34
20. Figure 5.3 Low-pass filter applied to the PWM waveform ........................................ 34
x
21. Figure 5.4 Timing diagram for Phase Correct PWM Mode ....................................... 36
22. Figure 5.5 Bitwise description of TCCR0 .................................................................. 36
23. Figure 5.6 Play back function flow chart .................................................................... 37
24. Figure 5.7 Fifth-order, Stagger-tuned Chebychev low-pass filter circuit ................... 38
25. Figure 5.8 AC analysis of the filter circuit ................................................................. 39
26. Figure 5.9 The power amplifier circuit ...................................................................... 40
xi
1
Chapter 1
INTRODUCTION
1.1
Introduction to Data Acquisition for Speech Recognition System
The data acquisition system is an embedded solution that has the capability to
record the speech signal and play the same speech back. It is implemented to be a part of
the speech recognition system. The speech recognition application includes a wide range
of fields including but not limited to voice dialing, appliance control and speech-to-text
processing. Obtaining the voice sample from user and storing them for later reference
plays a very important part in successfully completing the speech recognition system.
Moreover, many other sound processing systems such as voice Coders, sound effect
producer and telephone answering machine can also make use of the data acquisition
system discussed in this report.
1.2
Background of the Project
This project report describes the process of sound recording, data storage in the
external memory, and playing back the original speech signal using the development
board AVR STK500 from Atmel, the AVR microcontroller ATmega32A, the serial flash
memory W25Q80BV from Winbond Corporation and a few extra components like
LM324 (general purpose operation amplifier IC), LM386 (power Amplifier IC), resistors
and capacitors.
The AVR STK500 is AVR studio compatible development platform. It has two
RS-232 interfaces to PC: one for programming and control and the other for general use.
2
It supports parallel and serial high voltage programming as well as serial In-system
Programming (ISP) of AVR devices. Other feature includes 8 push buttons and 8 LEDs
for general use, pin header connectors for all AVR I/O ports, several clock options and
supply voltage options for target AVR microcontroller [2].
The ATmega32A is a 40-Pin PDIP package high-performance and low-power 8bit microcontroller with advanced RISC architecture. The ATmega32A includes
32Kbytes of in-system self-programmable flash program memory and 1024 bytes
EEPROM. The peripherals in this AVR microcontroller includes two 8-bit timer/
counters, one 16-bit timer/ counter, four PWM channels, 10-bit resolution ADC with
single-ended and differential channels, master/ slave SPI serial interface, analog
comparator, serial USART, two-wire serial interface. The Supply voltage requirement for
the ATMEGA32A is 2.7 – 5.5V and speed grade can go up to 16 MHz clock frequency
[1].
The W25Q80BV DataFlash is a low-power, serial-interface flash memory. It is an
8M-bit of memory available in 8-pin PDIP package. The W25Q80BV uses a Serial
Peripheral Interface (SPI) to sequentially access its data. This interface facilitates
hardware layout, increases system reliability, minimizes switching noise, and reduces
package size and active pin count. The DataFlash supports the standard Serial Peripheral
Interface (SPI) and a high-performance Dual/ Quad I/O SPI with SPI clock frequencies
up to 104 MHz, which is equivalent to 208 MHz (104 MHz x 2) for Dual I/O and 416
MHz (104 MHz x 4) for Quad I/O. The device operates from a single voltage power
3
supply (from 2.7V to 3.6V) for both the write and read operations with current
consumption as low as 4mA in active mode and 1uA for power down mode. Moreover,
JEDEC standard manufacturer and device identification is also supported with 64-bit
Unique Serial Number for the device. Its serial interface is compatible to the Serial
Peripheral Interface (SPI) Modes 0 and 3, thus it can easily be interfaced to the AVR
microcontroller [4].
1.3
Organization of Project Report
The report contains every detail of the project. Project is divided into 3 different
sections – Record the speech, Store the data and Play Back. Each section is covered in its
individual chapter.
Chapter two describes the overall hardware arrangement from the block diagram
to the hardware implementation including pin connections with the AVR device. It also
gives information about the development platform. The chapter contains the main loop
for the program used in the project.
Chapter three discusses the speech sampling procedure. The sampling criteria and
procedure are presented briefly. The AVR ATmega32A has an internal analog to digital
converter. Its setup is described in this section. Microphone interfacing with the AVR
microcontroller using pre-amplifier is also included in the same chapter.
Chapter four talks about the Serial Peripheral Interface (SPI) between the AVR
ATmega32A and the serial DataFlash W25Q80BV. The algorithms to program, read, and
erase the DataFlash is also discussed.
4
Chapter five describes the Pulse Width Modulation (PWM) waveform. The AVR
ATmega32A’s internal PWM channel is used to reproduce the original analog signal. The
low-pass filter circuit and the speaker amplifier circuit are also described in the later part
of this chapter.
Chapter six concludes the report and gives prospective about the future work.
5
Chapter 2
SYSTEM OVERVIEW
2.1
Introduction
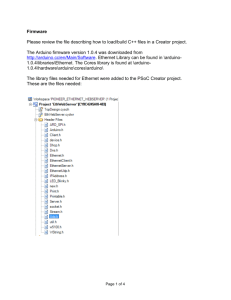
Figure 2.1 shows the basic block diagram of the sound recording system. It
basically consists of a four major building blocks.
Recording Section – microphone and a pre-amplifier circuit.
AVR ATmega32A – computational part of the system.
The DataFlash W25Q80BV – 8Mbit of data storage.
Play Back Section – a low-pass filter, a power amplifier circuit and a speaker.
Each of these blocks is described in the following chapters.
Figure 2.1 Block diagram
2.2
Hardware Implementation
Figure 2.2 shows the detailed hardware interface with the AVR ATmega32A
microcontroller. As shown in the figure, the AVR device is operated with an 8MHz
6
crystal oscillator. The user can operate the system using three pushbutton switches –
Erase, Record, and Playback connected to pins 0 to 2 of port D of the microcontroller.
7
Vcc
Microphone Pre-Amplifier
Speaker Filter Circuit
PB3
(OC0)
PA0
(ADC0)
22pF
XTAL1
8 MHz
Erase
XTAL2
PD0
PD1
Record
Vcc
PB4
(SS#)
CS#
PB5
(MOSI)
SDI
PB6
(MISO)
SDO
PB7
(SCK)
W25Q80BV
PD2
ATMEGA32A
Playback
Vcc
22pF
SCK
Vcc
GND
100R
AGND
AVcc
GND
AREF
100nF
Figure 2.2 Detailed hardware interface with AVR ATmega32a
The flash memory W25Q80BV is connected to the AVR microcontroller’s SPI
bus on the Port B. To convert speech signal into digital samples, the internal ADC of the
8
microcontroller is used. Channel 0 of the ADC is setup to accept the analog input through
the microphone pre-amplifier. For Playback, PWM channel 0 (OC0) is used. It is
connected to speaker filter circuit to smooth out the high frequency PWM output from the
AVR device.
2.3
AVR STK500 Development Platform
Figure 2.3 AVR STK500 components [2]
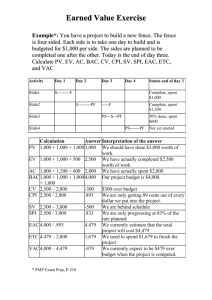
Figure 2.3 shows the AVR STK500 board components. Some important
components to note here are user LEDs, user pushbutton switches, I/O port headers, ISP
programming header, headers for high voltage programming and option setting jumpers.
Other significant part is two RS-232 interface sockets, status LED and power LED [2].
9
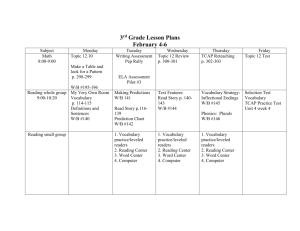
Figure 2.4 AVR STK500 block diagram [2]
Figure 2.4 shows the block diagram of the same development board. The board is
divided into two sections:
Control Section – This section has a control microcontroller. It provides controlling
and programming support for the target AVR device. The board setting allows user to
select the operating voltage of the target section, the analog reference voltage to the
10
ADC in the target device and oscillator frequency of the on-board programmable
oscillator [2].
Target Section – This section of the AVR STK500 board where the target AVR
device is inserted for the user application [2].
2.4
Software Organization
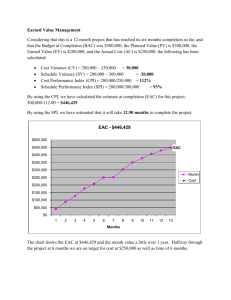
Figure 2.5 Software flow chart
Figure 2.5 shows the main loop used in this project. The SPI bus and I/O ports are
setup as per the requirement. One the ports are setup, the user controls the operation of
11
the system by using three pushbutton switches connected to the Port A. The software
loops through to poll for any pressed switch. If the “Record” button is pressed, it jumps to
the record section of the software and stays there until the button is released. The same is
true for other two procedures – Chip Erase and Play back.
12
Chapter 3
AUDIO SAMPLING
3.1
Analog to Digital Conversion
Before the analog speech signal from the microphone can be processed in the
AVR microcontroller or stored in the DataFlash it has to be converted into a digital
signal. This is done in multiple steps.
First, the analog signal is converted into a time discrete signal by taking periodic
samples (Figure 1).
Figure 3.1 Analog signal converted into a time discrete signal [6]
The Nyquist-Shannon sampling theorem states that to sample any continuous
signal properly, it must not contain any frequency component higher than the one-half of
the sampling rate. The time interval between two samples is called the “sampling period”
13
and its reciprocal the “sampling frequency”. Thus, According to the sampling theorem,
the sampling frequency has to be at least double the maximum signal frequency. If the
minimum sampling frequency criteria is not satisfied, then any frequency component
above half of the sampling frequency is indistinguishable from the lower-frequency
components. This is called an “alias”. Such an aliased signal cannot be uniquely
recovered from its samples. This is illustrated in figure 3.2 where (a), (b) and (c) shows
the proper sampling while (d) shows that when the analog signal frequency is higher that
one-half of the sample rate, then the original signal cannot be reconstructed from the
samples [6].
14
Figure 3.2 Illustration of proper and improper sampling of a sinusoidal signal [6]
The speech signal is band limited to 3000 Hz, i.e., it has most of the information
are contained between D.C and 3000 Hz. So, sampling frequency has to be set at least at
6000 Hz. Moreover, a low-pass filter can be used to suppress any component above 3000
Hz and therefore reduces the aliasing effect while reproducing the same signal from its
samples. In this project, a simple first-order RC filter is used. It does not have a very
steep roll-off for the frequencies above cut-off frequency. So, sampling frequency is
chosen to be very high than the minimum 6000 Hz [3].
15
Second step in the process is to determine the appropriate digital value that truly
represents the analog sample. This is called “quantization” (figure 2). Analog sample
value can vary in the discrete but infinite set of values. Quantization is the process of
approximating the actual analog sample value to nearest value from a finite set of values.
Thus, process of approximation introduces an error. It is called “quantization error”.
Quantization error depends upon the “resolution” of the system and “dynamic range” of
the analog signal. Resolution is defined as the number of digital values and it is limited.
For example, an 8-bit system has the resolution of 256. There are two distinct methods to
reduce quantization error either by adjusting reference voltages (AGND and AREF) of
A/D converter to match the dynamic range of the analog signal or by adjusting the
dynamic range of the analog signal to cover the maximum dynamic range of the A/D
converter. The latter method described here improves the signal-to-noise ratio (SNR) and
hence it is preferred method [3].
3.2
Hardware
In this project, a condenser type electret microphone is used. The design of
electret condenser microphone is based on the charging and discharging motion between
electric capacity conductors. If microphone is directly hooked up to the A/D converter,
then as the microphones produces very small signal output, it will not swing through the
maximum range of the A/D converter of the AVR microcontroller and therefore should
result into a large amount of quantization error. So, the microphone output has to be
16
amplified up to a level, which can cover the full dynamic range of analog-to-digital
converter.
Figure 3.3 Microphone pre-amplifier
Figure 3 shows the microphone pre-amplifier design. This is implemented using
an operation amplifier LM324 in inverting mode and an RC filter. R8 (10Kohm) is used
to as a current limiter resistance to power the microphone and C2 (10uF) blocks any DC
voltage from reaching the op-amp input. Gain of the amplifier is (R5/R1) and it is set
with variable resistance R5 (200KOhm). As the system operates on a single power
supply, virtual ground is created by keeping R3 (20KOhm) at the point where ADC in the
AVR device would give the output 512 in decimal, i.e., ADC Data Register should reflect
the value as 01_1111 _1111 in binary. C5, the capacitor in the feedback loop, introduces
17
a roll-off at high frequencies, giving better stability since the gain is very high. The RC
filter is a simple first order filter with a cut-off frequency of approximately 3000 Hz.
3.3
Software
Figure 3.4 Record function flow chart
18
The ATMEGA32A microcontroller has an in-system 10-bit resolution A/D
Converter (ADC), which is used to obtain the digital voice signal from the microphone.
ADC of the ATMEGA32A is connected to the PORTA. So, PORTA is defined as a highimpedance input.
The conversion rate is set at approximately 15,686 samples per second. To
achieve this rate of sampling, the ADC Data Register (ADCH and ADCL) has to be read
at every 510 cycles (15,686Hz x 510 cycles = 8 MHz) for a system operating at 8 MHz of
clock frequency. The ADC Pre-scaler Select Bits (ADPS [2:0] in the ADC Control and
Status Register A (ADCSRA) to 5. Therefore, ADC clock division factor is set at 32.
ADC is set to operate on single conversion mode. The conversion is started by setting the
ADC Start Conversion (ADSC) bit and clearing the ADC Auto Trigger Enable (ADATE)
bit in the ADCSR. Each conversion, except the first, takes 14 ADC cycles. It takes about
832-oscillator cycle to complete the first conversion and then after it takes only 448
cycles (14 x 32 = 448 cycles).
19
Figure 3.5 ADC running in single conversion mode [1]
Setting the ADC interrupt Enable (ADIE) bit in the ADCSRA also enables ADC
Conversion Interrupt. The interrupt service routine performs a delay loop to fill the
missing 62 cycles (510 – 448 = 62 cycles). Although an internal ADC produces 10-bit
output for every sample, it is sufficient to read only the 8 most significant bits and discard
2 least significant bits. Therefore, ADC is set to produce the result that is represented in a
left adjusted format by setting ADC Left Adjust Result (ADLAR) bit in ADC
Multiplexer Selection (ADMUX) Register. Since, ADC is set to produce left adjusted
results and only 8-bit of the information is required, it is sufficient to only read ADCH
from the ADC Data Register.
Following is the code snippet that shows the ADC settings:
//ADC Setup subroutine
void setup_adc(void){
DDRA = 0x00; //set PORTA as high impedance input port
20
ADMUX |= (1<<ADLAR); //ADC set to be left adjusted
//ADC Enabled, Conversion Complete Interrupt enabled, Clock division factor 32
ADCSRA |= (1<<ADEN)| (1<<ADIE)|(1<<ADPS2)|(1<<ADPS0);}
// ADC Conversion Complete Interrupt Service Routine
interrupt[ADC_INT] void data_ready(void){
unsigned char sample;
static unsigned long int byte_counter=0;
sample = ADCH; //as only 8 MSBs are required, reading only ADCH is sufficient
PORTD=sample;
delay_us(7); //filling up a 62 cycles gap
ADCSRA |= (1<<ADSC); //start new ADC conversion
DF_page_write(byte_counter,sample); // write data into the dataflash
byte_counter++;}
21
Chapter 4
DATA STORAGE USING SERIAL FLASH MEMORY
4.1
Serial Peripheral Interface in AVR ATMEGA32A
AVR ATMEGA32A supports master/ slave SPI serial interface. Some SPI
features of this AVR microcontroller are following [1]:
Three-wire Synchronous Data Transfer
Master/ Slave Operation
Programmable serial clock rates
End of Transmission Interrupt Flag
Serial Peripheral Interface (SPI) supports a very high-speed synchronous data
transfer between the AVR ATMEGA32A and peripheral devices. Figure 4.1 shows the
connection between master and slave SPI devices [1].
Figure 4.1 Master – Slave interconnection for SPI data transfer [1]
SPI specifies following four signals:
MOSI = Master Output Slave Input
22
MISO = Master Input Slave Output
SCK = Clock Signal
SS# = Slave Select (Active Low)
When the SPI is enabled, the data direction of the MOSI, MISO, SCK and SS# is
overridden according to following table.
Pin
Direction, Master SPI
Direction, Slave SPI
MOSI
User Defined
Input
MISO
Input
User Defined
SCK
User Defined
Input
SS#
User Defined
Input
Table 4.1 Data Direction [1]
Following table describes bit configuration for SPI Control Register (SPCR).
Bit Position
Name
Description
7
SPIE
If SPIF bit in the SPSR
SPI Interrupt Enable
register is set and global
interrupt is enable, this bit
causes the SPI interrupt to
be executed.
6
SPE
This
bit
enables
SPI Enable
operation, when it is set.
SPI
23
5
DORD
MSB is transmitted first,
Data Order
when this bit is set to zero.
Otherwise,
LSB
is
transmitted first.
4
MSTR
When it is set, the device
Master/ Slave Select
operates
in
master
SPI
mode, and slave SPI mode
when written to zero.
3
CPOL
SCK is high in idle mode,
Clock Polarity
when
this
bit
is
set.
Otherwise, when this bit is
written to zero, SCK is low
in idle mode.
2
CPHA
This bit determines when
Clock Phase
data is sampled and setup,
whether
on
leading
or
trailing edge
1, 0
SPR1, SPR0
These bits control the SCK
SPI Clock Rate Select 1 & 0 rate
of
the
device
configured as a master.
Table 4.2 SPI Control Register in ATmega32A [1]
24
The AVR ATMEGA32A has the SPI Data Register (SPDR), which is a read/
write register, and it is used to transfer the data between the master and slave devices. By
writing to this register starts the SPI data transmission. When SPDR is read, it actually
causes the shift register receive buffer to be read [1].
The combinations of parameter CPOL and CPHA determine the SPI mode of
operation. Master device must adhere to the supported mode for the slave device. The
four combinations generated by CPHA and CPOL decide the edge of the clock signals on
which the data are sampled and setup [1].
SPI Mode
CPOL
CPHA
Leading Edge
Trailing Edge
0
0
0
Sample (Rising)
Setup (Falling)
1
0
1
Setup (Rising)
Sample (Falling)
2
1
0
Sample (Falling) Setup (Rising)
3
1
1
Setup (Falling)
Sample (Rising)
Table 4.3 CPOL and CPHA states, functionality and SPI mode of operation [1]
The SPI data transfer formats for CPHA set to zero (mode 0 and mode 2) are
shown in figure 4.2.
25
Figure 4.2 The SPI data transfer format for CPHA = 0 (Mode 0 and 2) [1]
The SPI data transfer formats for CPHA set to one (mode 1 and mode 3) are
shown in figure 4.3.
Figure 4.3 The SPI data transfer format for CPHA = 1 (Mode 1 and 3) [1]
4.2
Serial Peripheral Interface in the DataFlash W25Q80BV
The DataFlash W25Q80BV is a serial-interfaced sequentially accessed flash
memory. It is a 8Mbits of flash memory divided in to 4096 pages. Each page is 256 bytes.
26
Pages are grouped into a sector. A group of 16 pages (4KB) makes a sector. 8 sectors are
grouped together to make a block of 32KB each. The chip has in total of 16 blocks. It is a
byte programmable flash memory, but it also has the facility to program 256 bytes of data
at once through page program [4].
Figure 4.4 Pin diagram of the DataFlash W25Q80BV [4]
The DataFlash supports the SPI operation mode 0 and 1. In the standard SPI
operation, the master device uses Serial Data Input (DI) pin to serial transfer instruction,
addresses and data to the device on the rising edge of the serial clock. The read data from
the DataFlash is put on the Serial Data Out (DO) on the falling edge of the serial clock
[4].
The W25Q80BV contains Status Register 1 and Status Register 2. The status
registers provide information such as if the device is write enabled or disabled, write
protection status, busy status, security register lock bits [4].
27
The DataFlash instruction begins as the falling edge of the chip selects (CS#) and
completed as the rising edge of the chip select (CS#). Data is always sampled as the most
significant bit (MSB) first [4].
4.3
Software for the DataFlash Access
As discussed earlier, the DataFlash is reached using an SPI interface of the AVR
ATmega32A. The Mode 3 SPI is setup using setting the SPCR register’s CPOL and
CPHA bits to logic one. For shifting out MSB of the SPDR first, DORD bit is kept logic
zero. The AVR ATmega32A is serving as a master device in this communication,
therefore MSTR bit is set to logic one. The Serial Clock (SCK) is run at 4 MHz by setting
SPR1 and SPR0 to logic zero. The SPI interrupt is disabled.
The Port B of the AVR device has to be setup separately to support the SPI data
transfer. The AVR ATmega32A drives the Serial Clock (SCK), Master Output Slave
Input (MOSI) and Slave Select (SS#), therefore corresponding pins of Port B – Pin 7
(SCK), Pin 5 (MOSI) and Pin 4 (SS#) are setup as output.
Following Code snippet shows the SPI initialization of the AVR device.
void DF_SPI_init (void){
PORTB= (1<<PORTB4);
//Set SS high
DDRB = (1<<PORTB4) | (1<<PORTB5)| (1<<PORTB7);
//Set SS, MOSI and
SCK as outputs
SPCR = (1<<SPE) | (1<<MSTR) | (1<<CPHA) | (1<<CPOL);
Master mode, mode 3, MSB first}
//Enable
SPI
in
28
4.4
Write to DataFlash
Figure 4.5 shows the flowchart for the write operation on the DataFlash
W25Q80BV. Every Page Write operation has to be preceded with a Write Enable
instruction. The Write Enable instruction sets the Write Enable Latch (WEL) bit in the
Status Register 1. After completing a single Write Enable instruction, the Page Program
(02h) instruction is initiated by driving CS# low then shifting the instruction code “02h”
followed by a 24-bit address and a data byte, into the DI pin. Page Program is a selftimed operation, i.e., after driving the last data byte into the DI pin and driving CS# high,
Page Program instruction begins its internal operation. For that whole time, reading the
status register will return the BUSY bit set to 1. Once the Page Program cycle is finished,
WEL bit will be automatically cleared to 0 [4].
29
Figure 4.5 Write to DataFlash flow chart
30
Following is the code segment, which shows the implementation of the above flowchart
in C.
void DF_page_write(unsigned long int byte_counter, unsigned char data){
unsigned char result;
DF_Write_Enable();
PORTB |= (1<<PORTB4);
//make sure to toggle CS signal in order
PORTB &= ~(1<<PORTB4);
result = DF_SPI_RW(0x02);
//send Page write opcode
result = DF_SPI_RW((char)(byte_counter>>16));
//Send 8 MSB of Page address
result = DF_SPI_RW((char)(byte_counter>>8));
//send 15-8 bits of page address
result = DF_SPI_RW((char)(byte_counter));
//send 7-0 bits of page address
result = DF_SPI_RW(data);
//send data
while((Read_DF_status() & 0x01));}
//make sure that data byte is written in the
memory
4.5
Erase Operation
Erasing the DataFlash works same as the Page Program cycle discussed earlier.
The Write Enable instruction has to be executed before beginning the Erase operation.
The Erase instruction is initiated by driving the CS# low and then shifting the instruction
code for the Chip Erase operation (C7h) into the DI pin. This will begin the self-timed
erase operation once the CS# is driven high again. The BUSY bit in the Status Register
will be set to 1 for the whole time. The BUSY bit can be polled continuously to check for
31
the complete execution of the instruction. The WEL bit in the Status Register will be
automatically cleared to 0 after the Chip Erase is completed. Figure 4.6 shows the
flowchart for the Chip Erase operation [4].
Figure 4.6 Chip erase function flow chart
32
4.6
Read Data from the DataFlash
Figure 4.7 shows the flowchart for the Read Data instruction. The instruction
begins by driving the CS# pin low and then moving the instruction code (02h) followed
by the 24-bit source address into the DI pin. As the master device is responsible for
driving the serial clock (SCK) signal, one byte of dummy data has to be shifted out of the
AVR device for each data byte that has to be read from the DataFlash. The device stays
in the read mode as long as the CS# pin is driven low. The address is automatically
incremented internally [4].
Figure 4.7 DataFlash read flow chart
33
Chapter 5
AUDIO GENERATION USING PWM
5.1
Pulse-width Modulation Waveform
Pulse-width Modulation uses a base square wave with a fixed frequency whose
duty cycle changes (from 0% to 100%) with respect to the amplitude of the analog signal.
For example, a high value of an analog signal may represent an increased duty cycle of
the PWM waveform and vice verse. A typical PWM waveform is shown in figure 5.1 [7].
Figure 5.1 A typical PWM waveform [7]
Figure 5.2 shows the frequency spectrum of the PWM waveform. According to
the Fourier analysis of the PWM waveform, it has a strong peak at Fn = 1/T, which is the
fundamental PWM frequency and other strong harmonics at F = K/T, where K is an
integer. To generate the original signal, all these unwanted harmonics have to be removed
[7].
34
Figure 5.2 Frequency spectrum of a typical PWM waveform [7]
Figure 5.3 shows the effect of passing the PWM waveform from a low-pass filter.
Theoretically if the bandwidth of the low-pass filter is equal to the fundamental
component frequency of the PWM waveform, then the original unmodulated information
signal can be restored at the output of that filter. But, for this to happen, the filter has to
have a brick-wall type of response. Therefore, for the practical purpose, the low-pass
filter should be designed with the bandwidth very much less than the FPWM [7].
Figure 5.3 Low-pass filter applied to the PWM waveform [7]
When PWM waveform is passed through an analog RC filter, the average value
can be extracted as high frequency PWM component gets suppressed through the
process. Thus it makes an inexpensive but efficient digital-to-analog converter (DAC).
35
5.2
AVR ATmega32A Setup for PWM Mode of Operation
The AVR ATmega32A has four PWM channels – one for Timer/ Counter 0, Two
for Timer/ Counter 1, and one for Timer/ Counter 2. Faithful generation of analog signal
depends upon the base PWM frequency. To successfully stop PWM frequency to reach
the analog output, the PWM frequency has to be at least double the signal frequency.
Higher than double the signal frequency is preferred depending upon the analog filter
design. The system clock for the AVR ATmega32A and the PWM resolution decides the
maximum PWM frequency. In this project, the AVR device runs at 8 MHz system clock
and for 8-bit PWM resolution, the maximum PWM frequency can be 15,686 Hz [3].
Timer/ Counter 0 is used to generate the PWM waveform. Figure 5.1 shows the
timing diagram for Phase Correct PWM Mode. Figure 5.2 shows the bit assignment for
Timer Control Register 0 (TCCR0). It is set up to operate on Phase Correct PWM Mode
with a timer clock prescaler to be 1. The Output Compare Register (OC0) is set to behave
as non-inverting mode, i.e., OC0 is cleared on compare match when Timer/ Counter
Register 0 (TCNT0) is up counting and OC0 is set on compare match when TCNT0 is
down counting [1].
36
Figure 5.4 Timing diagram for Phase Correct PWM Mode [1]
FOC0
WGM00
COM01
COM00
WGM01
CS02
CS01
CS00
Figure 5.5 Bitwise description of TCCR0 [1]
Following code segment shows the Timer/ Counter 0 setup for Phase Correct
PWM mode used in this project.
void setup_pwm(void){
DDRB |= (1<<PORTB3);
//Set OC0 as output
TCCR0 = (1<<COM01) | (1<<WGM00) | (1<<CS00);
TCNT0 = 0;
OCR0 = 0;
//Initialize Timer/ Counter register
37
TIMSK = 0x01;
//Timer Overflow Interrupt Enabled
TIFR =0x01;}
5.3
Software Setup for Play Back
Figure 5.6 Play back function flow chart
38
5.4
Hardware Circuit
The PWM waveform is passed through a low-pass filter to extract the analog
information. The filter can be a simple RC filter here. As the steep roll-off is required, a
fifth-order, stagger-tuned Chebychev low-pass filter is used. The Chebychev filter is used
in place of the Butterworth filter, because it has a steep roll-off factor compared to the
Butterworth filter. It contains a first-order unity-gain active low-pass filter followed by
another two second-order, unity-gain active low-pass filters. Overall cut-off frequency is
set to be approximately 4000 Hz, which is sufficient to put high frequency PWM
components at bay and stopping them to reach the output power amplifier input. Figure
5.3 shows the filter used in this system. The R1 and C2 makes the first-order low-pass
filter, the R2, R3 and C3, C4 makes the first of the two second-order low-pass filter and
the R4, R5 and C5, C6 makes up the other second-order low-pass filter. Figure 5.4 shows
the AC Sweep analysis for the filter circuit. The cut-off frequency of the overall design is
clearly marked down in the same figure [5].
V1
5Vdc
C4
C6
5.6n
0
OUT
2
C2
680p
- 11
1
R2
U1B
+
OUT
6
LM324
V-
5
100k
Stage_1_Output
- 11
C3
100p
7
R4
10
+
Output
OUT
9
LM324
V-
U1C
91k
V+
+
4
U1A
V+
4
3
91k
V+
R1
PWM Wav ef orm
10k
R5
4
10n
15k
R3
Stage_2_Output
C5
- 11
8
LM324
V-
560p
Figure 5.7 Fifth-order, Stagger-tuned Chebychev low-pass filter circuit
Power Amplif ier
39
Figure 5.8 AC analysis of the filter circuit
The filter output cannot directly drive a speaker with enough power. Therefore, a
power amplifier is used to drive the speaker. Figure 5.5 shows the power amplifier
circuit. The LM386, an audio power amplifier IC is used. The gain of the circuit is set to
200 by bypassing the internal resistance between pin 1 and pin 8 using a capacitor C4.
The C1 in conjunction with the potentiometer R1 makes a high-filter and blocks any DC
component form the filter circuit. The Potentiometer R1 also serves as a volume control.
At the output, the capacitor C2 is used to block DC voltage to reach the speaker input.
40
220u
R2
C3
10
V1
5Vdc
C1
10u
R1
10K
U1
6
7
Speaker Filter Output
3
C2
5
-
4
8
1
2
+
LS1
220u
LM386
C4
10u
Figure 5.9 The power amplifier circuit
C5
0.05u
R3
10
SPEAKER
41
Chapter 6
CONCLUSION
6.1
Conclusion
In conclusion, this project assignment was about acquiring the human speech
faithfully for the processing purposes. The reproduction of the speech provided a check
for the whole system. The choice of microphone pre-amplifier design proved essential to
the overall success of the project as the gain and the virtual ground was set precisely to
cover the dynamic range of the analog-to-digital converter. The choice of the sampling
rate was also important, but it was chosen greater than the minimum requirement to
compensate for the variations in the component values. The serial DataFlash provided
efficient storage in terms of the system resources. The SPI transfer rate was set to
maximum to ensure maximum throughput. The DataFlash size was taken as 1 Mbyte,
therefore It was possible to store approximately 1 minute of data can be stored with a
15,686 KHz sampling rate. The PWM waveform proved to be very efficient in
reproducing the analog signals from the digital samples. The most difficult part of the
project was the design of the speaker filter. The Chebychev filter design proved effective
in the end as it has steeper roll-off slope than the same of the Butterworth filter. The
resistors were chosen to be precise with the mathematical calculations so that the cut-off
frequency can be achieved accurately.
42
6.2
Future Work
In future, this speech data acquisition system can be integrated into the speech
recognition system. Moreover, a SD/ MMC card interface can be added instead of a serial
flash memory. It can provide far more flexibility in terms of how the data can be accessed
and how much data can be stored for processing. Finally, inclusion of a computer
interface can be very helpful to the overall design.
43
APPENDIX
Implementation Software
#include <mega32.h>
#include <delay.h>
unsigned char wait = 0;
void DF_SPI_init (void);
unsigned char DF_SPI_RW (unsigned char output);
unsigned char Read_DF_status (void);
void DF_Write_Enable(void);
void DF_page_write(unsigned long int byte_counter, unsigned char data);
void DF_page_read(unsigned long int byte_counter);
void DF_chip_erase(void);
void setup_adc(void);
void disable_adc(void);
void setup_pwm(void);
void disable_pwm(void);
void record_speech(void);
interrupt[ADC_INT] void data_ready(void);
void generate_pwm(void);
interrupt[TIM0_OVF] void nothing();
44
void main(void){
DDRD = 0xFF;
PORTD = 0xFF;
#asm
sei
#endasm
DF_SPI_init();
while(1){
if(!(PINA & 8)){
DF_chip_erase();
while(!(PINA & 8));}
if(!(PINA & 2)){
record_speech();}
if(!(PINA & 4)){
generate_pwm();}}}
void DF_SPI_init (void){
PORTB= (1<<PORTB4);
//Set SS high
DDRB = (1<<PORTB4) | (1<<PORTB5)| (1<<PORTB7); //Set SS, MOSI and
SCK as outputs
SPCR = (1<<SPE) | (1<<MSTR) | (1<<CPHA) | (1<<CPOL);} //Enable SPI in
Master mode, mode 3, MSB first
45
unsigned char DF_SPI_RW (unsigned char output){
unsigned char input;
SPDR = output;
//put byte 'output' in SPI data register
while(!(SPSR & 0x80));
//wait for transfer complete, poll SPIF-flag
input = SPDR;
//read value in SPI data reg.
return input;}
//return the byte clocked in from SPI slave
unsigned char Read_DF_status (void){
unsigned char result,index_copy;
PORTB |= (1<<PORTB4);
//make sure to toggle CS signal in order
PORTB &= ~(1<<PORTB4);
//to reset dataflash command decoder
result = DF_SPI_RW(0x05);
//send status register read op-code
result = DF_SPI_RW(0x00);
//dummy write to get result
return result;}
//return the read status register value
void DF_Write_Enable(void){
unsigned char result;
PORTB |= (1<<PORTB4);
//make sure to toggle CS signal in order
PORTB &= ~(1<<PORTB4);
//to reset dataflash command decoder
result = DF_SPI_RW(0x06); }
//send status register read op-code
void DF_page_write(unsigned long int byte_counter, unsigned char data){
46
unsigned char result;
DF_Write_Enable();
PORTB |= (1<<PORTB4);
//make sure to toggle CS signal in order
PORTB &= ~(1<<PORTB4);
result = DF_SPI_RW(0x02);
//send Page write opcode
result = DF_SPI_RW((char)(byte_counter>>16));//Send 8 MSB of Page address
result = DF_SPI_RW((char)(byte_counter>>8));//send 15-8 bits of page address
result = DF_SPI_RW((char)(byte_counter)); //send 7-0 bits of page address
result = DF_SPI_RW(data);
//send data
while((Read_DF_status() & 0x01)); }//make sure that data byte is written in the memory
void DF_page_read(unsigned long int byte_counter){
unsigned char result;
PORTB |= (1<<PORTB4);
//make sure to toggle CS signal in order
PORTB &= ~(1<<PORTB4);
result = DF_SPI_RW(0x03);
//Send Read Byte Opcode
result = DF_SPI_RW((char)(byte_counter>>16));//Send 23-16 bits of address
result = DF_SPI_RW((char)(byte_counter>>8));//Send 15-8 bits of page address
result = DF_SPI_RW((char)(byte_counter)); } //send 7-0 bits of page address
void DF_chip_erase(void){
unsigned char result;
DF_Write_Enable();
47
PORTB |= (1<<PORTB4);
//make sure to toggle CS signal in order
PORTB &= ~(1<<PORTB4);
result = DF_SPI_RW(0xC7); //Send Chip Erase Opcode
while((Read_DF_status() & 0x01));}
void setup_adc(void){
DDRA = 0x00;
//Set PortA as high impedance input port
ADMUX |= (1<<ADLAR);
//Reference Voltage is Aref, ADC set to be
left adjusted, Channel 0 is used
ADCSRA |= (1<<ADEN)| (1<<ADIE)|(1<<ADPS2)|(1<<ADPS0); }
//Clock
division
factor = 32, Interrupt Enabled
void disable_adc(void){
ADCSRA = 0x00;}
void setup_pwm(void){
DDRB |= (1<<PORTB3);
//Set OC0 as output
TCCR0 = (1<<COM01) | (1<<WGM00) | (1<<CS00); //Timer Clock Prescaler =
1, Non inverting mode, Phase correct PWM
TCNT0 = 0;
//Initialize Timer/ Counter register
OCR0 = 0;
TIFR = 0x01;
TIMSK =0x01;}
void disable_pwm(void){
//Timer Overflow Interrupt Enabled
48
TCCR0 = 0x00;
TCNT0 = 0x00;
TIMSK = 0x00;
TIFR = 0x00;}
void record_speech(void){
setup_adc();
ADCSRA |= (1<<ADSC);
//START CONVERSION
while(!(PINA & 2));
//wait until the record button is pressed
disable_adc();}
//STOP ADC
interrupt[ADC_INT] void data_ready(void){
unsigned char sample;
static unsigned long int byte_counter=0;
sample = ADCH;
//read Digital Sample
PORTD=sample;
delay_us(7);
//loop for approx. 62 cycles
ADCSRA |= (1<<ADSC);
DF_page_write(byte_counter,sample); //write in to the dataflash
byte_counter++;}
void generate_pwm(void){
unsigned char stored_sample;
49
unsigned long int byte_counter = 0;
setup_pwm();
DF_page_read(byte_counter);
while(!(PINA & 4)){
stored_sample = DF_SPI_RW(0x00);
while(wait);
OCR0 = stored_sample;
delay_us(100);
wait = 1;}
disable_pwm();}
interrupt[TIM0_OVF] void nothing() {wait = 0;}
50
REFERENCES
[1] Atmel Corp., "8-bit AVR Microcontroller with 32K Bytes In-System Programmable
Flash - ATmega32A", July 2009.
[2] Atmel Corp., "AVR STK500", User Guide, March 2003.
[3] Atmel Corp., "AVR335: Digital Sound Recorder with AVR and DataFlash",
Application Note, April 2005.
[4] Winbond Electronics Corp., "W25Q80BV - 8M-bit Serial Flash Memory with Dual
and Quad SPI", July 2010.
[5] Thomas Kugelstadt and Ron Mancini, "Op amps For Everyone: Design Reference",
Texas Instruments Inc., August 2002.
[6] Steven W. Smith, "Digital Signal Processing - A Practical Guide for Engineers and
Scientists", Newnes, 2003.
[7] Microchip Technology Inc., "Using PWM to Generate Analog Output", 2002.