Clustering
advertisement

Clustering
Credit: Padhraic Smyth
University of California, Irvine
Clustering
• “automated detection of group structure in data”
– Typically: partition N data points into K groups (clusters) such
that the points in each group are more similar to each other
than to points in other groups
– descriptive technique (contrast with predictive)
– for real-valued vectors, clusters can be thought of as clouds of
points in p-dimensional space
Clustering
Sometimes easy
Sometimes impossible
and sometimes in between
Why is Clustering useful?
•
“Discovery” of new knowledge from data
– Contrast with supervised classification (where labels are known)
– Long history in the sciences of categories, taxonomies, etc
– Can be very useful for summarizing large data sets
• For large n and/or high dimensionality
• Applications of clustering
–
–
–
–
–
Clustering of documents produced by a search engine
Segmentation of customers for an e-commerce store
Discovery of new types of galaxies in astronomical data
Clustering of genes with similar expression profiles
Cluster pixels in an image into regions of similar intensity
– …. many more
General Issues in Clustering
•
Clustering algorithm = Representation + Score + Optimization
•
Cluster Representation:
•
Score:
•
Optimization and Search
•
–
–
–
–
What types or “shapes” of clusters are we looking for? What defines a cluster?
A clustering = assignment of n objects to K clusters
Score = quantitative criterion used to evaluate different clusterings
Finding the optimal (minimal/maximal score) clustering is typically NP-hard
•
Greedy algorithms to optimize the score are widely used
Other issues
–
Distance function, D[x(i),x(j)] critical aspect of clustering, both
–
–
How is K selected?
Different types of data
•
•
distance of individual pairs of objects
distance of individual objects from clusters
•
•
Real-valued versus categorical
Attribute-valued vectors vs. n2 distance matrix
Different Types of Clustering Algorithms
• partition-based clustering
– e.g. K-means
• probabilistic model-based clustering
– e.g. fuzzy k-means, mixture models
[both of the above work with measurement data, e.g., feature vectors]
• hierarchical clustering
– e.g. hierarchical agglomerative clustering
• graph-based clustering
– E.g., min-cut algorithms
[both of the above work with distance data, e.g., distance matrix]
Different Types of Input to Clustering Algorithms
• Data matrix:
– N rows d columns
• Distance matrix
– N x N distances between objects
Partition-Based Clustering
•
input:
– n data points X={x(1) … x(n)}, of dimension d
–
•
K = number of cluster s
output: C = {C1 … CK} = specification of K clusters
– implicit representation:
• each x(i) is assigned to a unique Cj (hard-assignment)
– explicit representation
• each Cj is specified in some manner, e.g., as a mean or a region in input space
•
Optimization algorithm
– require that score[C] is minimized (or maximized)
• e.g., sum-of-squares of within cluster distances
– exhaustive search is intractable
– combinatorial optimization problem: assign n objects to K classes
– large search space: number of possible clusterings is approximately Kn / K!
• so, use greedy iterative method
• will be subject to local maxima
Score Functions for Partition-Based Clustering
• want compact clusters
– minimize within cluster distances wc(C)
• want different clusters far apart
– maximize between cluster distances bc(C)
• given cluster partitioning C, find centers c1…cK
– e.g. for vectors, use centroids of points in cluster Ci
• Ci = 1/(ni)
x Ci
x
– wc(C) = sum-of-squares within cluster distance (minimize)
• wc(C) = i=1…k wc(Ci)
where
wc(Ci) = i=1…k
– bc(C) = distance between clusters (maximize)
• bc(C) = i,j=1…k d(ci,cj)2
x Ci
d(x,ci)2
K-means Clustering
• basic idea:
– Score = wc(C) = sum-of-squares within cluster distance
– start with randomly chosen cluster centers c1 … cK
– repeat until no cluster memberships change:
• assign each point x to cluster with nearest center
– find smallest d(x,ci), over all c1 … cK
• recompute cluster centers over data assigned to them
– Ci = 1/(ni) x Ci x
• algorithm terminates (finite number of steps)
– Score(C) at each iteration (if membership changes)
• converges to at least a local minimum of Score(C)
– not necessarily the global minimum …
– different initial centers (seeds) can lead to diff local minima
Squared Errors and Cluster Centers
• Squared error (distance) between a data point x and a cluster center c:
d[x,c]=
j ( xj - cj )2
• •Total squared error between a cluster center c(k) and all Nk points
assigned to that cluster:
Sk =
i d [ xi , ck ]
Distance is usually defined as Euclidean distance
• Total squared error summed across K clusters
SSE =
Data Mining Lectures
k Sk
Lectures 12,13: Clustering
Padhraic Smyth, UC Irvine
K-means Complexity
• time complexity = O(I e n K) << exhaustive ~ Kn / K!
– I = number of interations (steps)
– e = cost of distance computation (e=p for Euclidean dist)
• Approximations/speed-up tricks for very large n
– use x(i)’s nearest to means as cluster centers instead of actual mean
• reuse of cached dists from size n2 dist mat D (lowers effective “e”)
– “condense”: reduce “n” by replacing group with prototype
– Additional references:
K-means
1. Ask user how many
clusters they’d like.
(e.g. K=5)
(Example is courtesy of
Andrew Moore, CMU)
K-means
1. Ask user how many
clusters they’d like.
(e.g. K=5)
2. Randomly guess K
cluster Center
locations
K-means
1. Ask user how many
clusters they’d like.
(e.g. K=5)
2. Randomly guess K
cluster Center
locations
3. Each datapoint finds
out which Center it’s
closest to. (Thus
each Center “owns”
a set of datapoints)
K-means
1. Ask user how many
clusters they’d like.
(e.g. k=5)
2. Randomly guess k
cluster Center
locations
3. Each datapoint finds
out which Center it’s
closest to.
4. Each Center finds
the centroid of the
points it owns
K-means
1. Ask user how many
clusters they’d like.
(e.g. k=5)
2. Randomly guess k
cluster Center
locations
3. Each datapoint finds
out which Center it’s
closest to.
4. Each Center finds
the centroid of the
points it owns
5. New Centers =>
new boundaries
6. Repeat until no
change
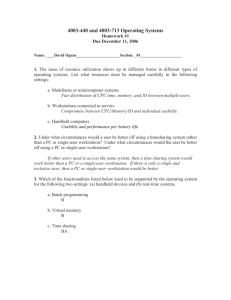
Image
K-means clustering of RGB (3 value) pixel
color intensities, K = 11 segments
(from David Forsyth, UC Berkeley)
Image
Clusters on color
K-means clustering of RGB (3 value) pixel
color intensities, K = 11 segments
(from David Forsyth, UC Berkeley)
Issues in K-means clustering
• Simple, but useful
– tends to select compact “isotropic” cluster shapes
– can be useful for initializing more complex methods
– many algorithmic variations on the basic theme
• e.g., in signal processing/data compression is similar to vector-quantization
• Choice of distance measure
– Euclidean distance
– Weighted Euclidean distance
– Many others possible
• Selection of K
– “screen diagram” - plot SSE versus K, look for “knee” of curve
• Limitation: may not be any clear K value
Convergence to Global Minimum
• Does K-means always converge to the best possible solution?
– i.e., the set of K centers that minimize the SSE?
• No: always converges to *some* solution, but not necessarily the
best
– Depends on the starting point chosen
• To think about: prove that SSE always decreases after every
iteration of the K-means algorithm, until convergence. (hint: need to
prove that assignment step and computation of cluster centers both
decrease the SSE)
Local Search and Local Minima
Data Mining Lectures
Lectures 12,13: Clustering
Padhraic Smyth, UC Irvine
Suboptimal Results from K-means on
Simulated Data
Why does k-means not perform so well on this example?
Finite Mixture Models
p ( x) ?
Finite Mixture Models
K
p (x) p(x, ck )
k 1
Finite Mixture Models
K
p (x) p (x, ck )
k 1
K
p (x | ck ) p (ck )
k 1
Finite Mixture Models
K
p (x) p (x, ck )
k 1
K
p (x | ck ) p (ck )
k 1
K
p (x | ck , k ) wk
k 1
Finite Mixture Models
K
p (x) p (x, ck )
k 1
K
p (x | ck ) p (ck )
k 1
K
p (x | ck , k ) wk
k 1
Component
Modelk
Weightk
Parametersk
0.5
p(x)
0.4
Component 1
Component 2
0.3
0.2
0.1
0
-5
0
5
10
5
10
0.5
p(x)
0.4
Mixture Model
0.3
0.2
0.1
0
-5
Data Mining Lectures
0
x
Lectures 12,13: Clustering
Padhraic Smyth, UC Irvine
0.5
p(x)
0.4
Component 1
Component 2
0.3
0.2
0.1
0
-5
0
5
10
5
10
0.5
p(x)
0.4
Mixture Model
0.3
0.2
0.1
0
-5
Data Mining Lectures
0
x
Lectures 12,13: Clustering
Padhraic Smyth, UC Irvine
2
p(x)
1.5
Component Models
1
0.5
0
-5
0
5
10
5
10
0.5
p(x)
0.4
Mixture Model
0.3
0.2
0.1
0
-5
Data Mining Lectures
0
x
Lectures 12,13: Clustering
Padhraic Smyth, UC Irvine
Interpretation of Mixtures
1. C has a direct (physical) interpretation
e.g., C {age of fish}, C = {male, female}
Interpretation of Mixtures
1. C has a direct (physical) interpretation
e.g., C {age of fish}, C = {male, female}
2. C is a convenient hidden variable (i.e., the cluster variable)
- focuses attention on subsets of the data
e.g., for visualization, clustering, etc
- C might have a physical/real interpretation
but not necessarily so
Probabilistic Clustering: Mixture Models
• assume a probabilistic model for each component cluster
• mixture model: f(x) = k=1…K wk fk(x;k)
• wk are K mixing weights
– 0 wk 1 and k=1…K wk = 1
• where K component densities fk(x;k) can be:
–
–
–
–
Gaussian
Poisson
exponential
...
P
d
• Note:
– Assumes a model for the data (advantages and disadvantages)
– Results in probabilistic membership: p(cluster k | x)
Gaussian Mixture Models (GMM)
• model for k-th component is normal N(k,k)
– often assume diagonal covariance: jj = j2 , ij = 0
– or sometimes even simpler:
jj = 2 , ij = 0
• f(x) = k=1…K wk fk(x;k) with k = <k , k> or <k ,k>
• generative model:
– randomly choose a component
• selected with probability wk
– generate x ~ N(k,k)
– note: k & k both d-dim vectors
Learning Mixture Models from Data
• Score function = log-likelihood L()
– L() = log p(X|) = log H p(X,H|)
– H = hidden variables (cluster memberships of each x)
– L() cannot be optimized directly
• EM Procedure
– General technique for maximizing log-likelihood with missing data
– For mixtures
• E-step: compute “memberships” p(k | x) = wk fk(x;k) / f(x)
• M-step: pick a new to maximize expected data log-likelihood
• Iterate: guaranteed to climb to (local) maximum of L()
The E (Expectation) Step
n data
points
Current K clusters
and parameters (mean
and covariance for each
cluster)
E step: Compute p(data point i is in group k)
given mean and covariance for each cluster
The M (Maximization) Step
n data
points
New parameters for
the K clusters
M step: Compute , given n data points and memberships
a new estimate for mean and covariance for each cluster
Complexity of EM for mixtures
n data
points
K models
Complexity per iteration scales as O( n K f(p) )
Comments on Mixtures and EM Learning
•
Complexity of each EM iteration
– Depends on the probabilistic model being used
• e.g., for Gaussians, Estep is O(nK), Mstep is O(nKp2)
– Sometimes E or M-step is not closed form
• => can require numerical optimization or sampling within each iteration
• Generalized EM (GEM): instead of maximizing likelihood, just increase likelihood
• EM can be thought of as hill-climbing with direction and step-size provided automatically
•
K-means as a special case of EM
– Gaussian mixtures with isotropic (diagonal, equi-variance) k ‘s
– Approximate the E-step by choosing most likely cluster (instead of using
membership probabilities)
•
Generalizations…
–
–
–
–
Mixtures of multinomials for text data
Mixtures of Markov chains for Web sequences
+ more
Will be discussed later in lectures on text and Web data
ANEMIA PATIENTS AND CONTROLS
Red Blood Cell Hemoglobin Concentration
4.4
4.3
4.2
4.1
4
3.9
3.8
3.7
3.3
Data Mining Lectures
3.4
3.5
3.6
3.7
Red
Blood
Volume
Lectures
12,13:Cell
Clustering
3.8
3.9
4
Padhraic Smyth, UC Irvine
EM ITERATION 1
Red Blood Cell Hemoglobin Concentration
4.4
4.3
4.2
4.1
4
3.9
3.8
3.7
3.3
Data Mining Lectures
3.4
3.5
3.6
3.7
RedLectures
Blood
Volume
12,13:Cell
Clustering
3.8
3.9
4
Padhraic Smyth, UC Irvine
EM ITERATION 3
Red Blood Cell Hemoglobin Concentration
4.4
4.3
4.2
4.1
4
3.9
3.8
3.7
3.3
Data Mining Lectures
3.4
3.5
3.6
3.7
RedLectures
Blood
Volume
12,13:Cell
Clustering
3.8
3.9
4
Padhraic Smyth, UC Irvine
EM ITERATION 5
Red Blood Cell Hemoglobin Concentration
4.4
4.3
4.2
4.1
4
3.9
3.8
3.7
3.3
Data Mining Lectures
3.4
3.5
3.6
3.7
RedLectures
Blood
Volume
12,13:Cell
Clustering
3.8
3.9
4
Padhraic Smyth, UC Irvine
EM ITERATION 10
Red Blood Cell Hemoglobin Concentration
4.4
4.3
4.2
4.1
4
3.9
3.8
3.7
3.3
Data Mining Lectures
3.4
3.5
3.6
3.7
RedLectures
Blood
Volume
12,13:Cell
Clustering
3.8
3.9
4
Padhraic Smyth, UC Irvine
EM ITERATION 15
Red Blood Cell Hemoglobin Concentration
4.4
4.3
4.2
4.1
4
3.9
3.8
3.7
3.3
Data Mining Lectures
3.4
3.5
3.6
3.7
RedLectures
Blood
Volume
12,13:Cell
Clustering
3.8
3.9
4
Padhraic Smyth, UC Irvine
EM ITERATION 25
Red Blood Cell Hemoglobin Concentration
4.4
4.3
4.2
4.1
4
3.9
3.8
3.7
3.3
Data Mining Lectures
3.4
3.5
3.6
3.7
RedLectures
Blood
Volume
12,13:Cell
Clustering
3.8
3.9
4
Padhraic Smyth, UC Irvine
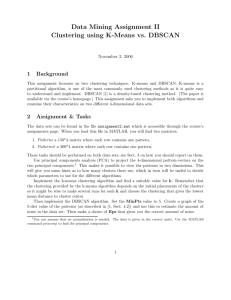
ANEMIA DATA WITH LABELS
Red Blood Cell Hemoglobin Concentration
4.4
4.3
4.2
4.1
4
3.9
3.8
3.7
3.3
Data Mining Lectures
3.4
3.5
3.6
3.7
RedLectures
Blood
Volume
12,13:Cell
Clustering
3.8
3.9
4
Padhraic Smyth, UC Irvine
LOG-LIKELIHOOD AS A FUNCTION OF EM ITERATIONS
490
480
Log-Likelihood
470
460
450
440
430
420
410
400
0
Data Mining Lectures
5
10
15
EM Iteration
Lectures 12,13: Clustering
20
25
Padhraic Smyth, UC Irvine
Selecting K in mixture models
•
cannot just choose K that maximizes likelihood
–
•
Likelihood L() is always larger for larger K
Model selection alternatives:
–
1) penalize complexity
•
•
•
–
2) Bayesian: compute posteriors p(k | data)
•
•
•
–
P(k|data) requires computation of p(data|k) = marginal likelihood
Can be tricky to compute for mixture models
Recent work on Dirichlet process priors has made this more practical
3) (cross) validation:
•
•
•
•
–
e.g., BIC = L() – d/2 log n , d = # parameters
(Bayesian information criterion)
Asymptotically correct under certain assumptions
Often used in practice for mixture models even though assumptions for theory are not met
Score different models by log p(Xtest | )
split data into train and validate sets
Works well on large data sets
Can be noisy on small data (logL is sensitive to outliers)
Note: all of these methods evaluate the quality of the clustering as a density estimator,
rather than with any explicit notion of clustering
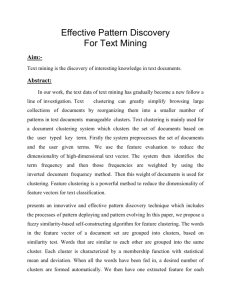
Example of BIC Score for Red-Blood Cell Data
Example of BIC Score for Red-Blood Cell Data
True number
of classes (2)
selected by BIC
Hierarchical Clustering
•
•
Representation: tree of nested clusters
Works from a distance matrix
– advantage: x’s can be any type of object
– disadvantage: computation
•
two basic approachs:
– merge points (agglomerative)
– divide superclusters (divisive)
•
visualize both via “dendograms”
– shows nesting structure
– merges or splits = tree nodes
•
Applications
– e.g., clustering of gene expression data
– Useful for seeing hierarchical structure, for
relatively small data sets
Simple example of hierarchical clustering
Agglomerative Methods: Bottom-Up
•
algorithm based on distance between clusters:
– for i=1 to n let Ci = { x(i) }, i.e. start with n singletons
– while more than one cluster left
• let Ci and Cj be cluster pair with minimum distance, dist[Ci , Cj ]
• merge them, via Ci = Ci Cj and remove Cj
•
time complexity = O(n2) to O(n3)
– n iterations (start: n clusters; end: 1 cluster)
– 1st iteration: O(n2) to find nearest singleton pair
•
space complexity = O(n2)
– accesses all distances between x(i)’s
•
interpreting large n dendrogram difficult anyway (like decision trees)
– large n idea: partition-based clusters at leafs
Distances Between Clusters
• single link / nearest neighbor measure:
– D(Ci,Cj) = min { d(x,y) | x Ci, y Cj }
– can be outlier/noise sensitive
Distances Between Clusters
• single link / nearest neighbor measure:
– D(Ci,Cj) = min { d(x,y) | x Ci, y Cj }
– can be outlier/noise sensitive
• complete link / furthest neighbor measure:
– D(Ci,Cj) = max { d(x,y) | x Ci, y Cj }
– enforces more “compact” clusters
Distances Between Clusters
• single link / nearest neighbor measure:
– D(Ci,Cj) = min { d(x,y) | x Ci, y Cj }
– can be outlier/noise sensitive
• complete link / furthest neighbor measure:
– D(Ci,Cj) = max { d(x,y) | x Ci, y Cj }
– enforces more “compact” clusters
• intermediates between those extremes:
– average link: D(Ci,Cj) = avg { d(x,y) | x Ci, y Cj }
– centroid:
D(Ci,Cj) = d(ci,cj) where ci , cj are centroids
• Note that centroid require that vector mean can be defined
•
Which to choose? Different methods may be used for exploratory purposes,
depends on goals and application
Old-Faithful Eruption Timing Data Set
• Notice that these variables are not scaled: so waiting time will get a
lot more emphasis in Euclidean distance calculations than duration
Dendrogram Using Single-Link Method
Old Faithful Eruption Duration vs Wait Data
Notice how single-link
tends to “chain”.
dendrogram y-axis = crossbar’s distance score
Dendogram Using Ward’s SSE Distance
Old Faithful Eruption Duration vs Wait Data
More balanced than
single-link.
Hierarchical Cluster
Structure of languages
Scalability of Hierarchical Clustering
• N objects to cluster
• Hierarchical clustering algorithms scale as O(N2) to O(N3)
– Why?
• This is problematic for large N……
• Solutions?
– Use K-means (or a similar algorithm) to create an initial set of K clusters
and then use hierarchical clustering from there
– Use approximate fast algorithms
Data Mining Lectures
Lectures 12,13: Clustering
Padhraic Smyth, UC Irvine
Divisive Methods: Top-Down
• algorithm:
– begin with single cluster containing all data
– split into components, repeat until clusters = single points
• two major types:
– monothetic:
• split by one variable at a time -- restricts search space
• analogous to decision trees
– polythetic
• splits by all variables at once -- many choices makes this difficult
• less commonly used than agglomerative methods
– generally more computationally intensive
• more choices in search space
MATLAB Demo
• In-class Matlab demo comparing different hierarchical algorithms
and k-means, on the same data sets
Spectral/Graph-based Clustering
Idea:
• think of distance matrix as a weighted graph where
- objects are nodes
- edges exist for objects with high similarity
Spectral/Graph-based Clustering
Idea:
• think of distance matrix as a weighted graph where
- objects are nodes
- edges exist for objects with high similarity
• finding a good grouping of the objects is
somewhat equivalent to finding low-weight
subgraphs
- can be reduced to “min-cut” algorithms
- related to eigenstructure of distance matrix
- e.g., Shi and Malik, 1997, for image segmentation
Clustering non-vector objects
•
E.g., sequences, images, documents, etc
– Can be of varying lengths, sizes
•
Distance matrix approach
– E.g., compute edit distance/transformations for pairs of sequences
– Apply clustering (e.g., hierarchical) based on distance matrix
– However….does not scale well computationally
•
“Vectorization”
– Represent each object as a vector
– Cluster resulting vectors using vector-space algorithm
– However…. can lose (e.g., sequence) information by going to vector space
•
Probabilistic model-based clustering
– Treat as mixture of stochastic models (e.g., Markov models)
– Can naturally handle variable lengths/sizes
– Will discuss application to Web session clustering later in the quarter
Clustering of TROPICAL CYCLONES Western North Pacific 1983-2002
(from Scott Gaffney’s Phd Thesis, 2004: uses mixture of regressions clustering)
K-Means Clustering
Task
Clustering
Representation
Partition based on K
centers
Score Function
Within-cluster sum of
squared errors
Search/Optimization
Iterative greedy search
Data
Management
None specified
Models,
Parameters
K centers
Probabilistic Model-Based Clustering
Task
Representation
Score Function
Search/Optimization
Clustering
Mixture of Probability
Components
Log-likelihood
EM (iterative)
Data
Management
None specified
Models,
Parameters
Probability
model
Single-Link Hierarchical Clustering
Task
Clustering
Representation
Tree of nested groupings
Score Function
No global score
Search/Optimization
Iterative merging of
nearest neighbors
Data
Management
None specified
Models,
Parameters
Dendrogram
Summary
• Many different approaches and algorithms
• No “optimal” or “best” approach
– What type of cluster structure are you looking for?
• Computational complexity may be an issue for large n
• Dimensionality is also an issue
• Validation/selection of K is often an ill-posed problem
– Often no “right answer” on what the optimal number of clusters
is