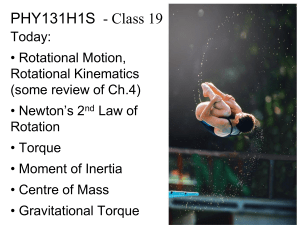
Powerpoint Slide
advertisement

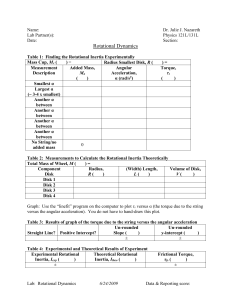
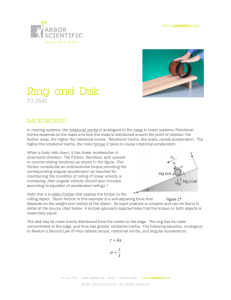
Lab 8: Rotational Dynamics and Moment of Inertia Only 4 more to go!! Rotational motion and linear motion are very similar. Many of the quantities we discuss in rotation have linear motion counterparts: Linear Motion Rotational Counterpart Position: s, d Angular position: Displacement: x = xF - xi Angular displacement: = F - i Velocity: v = x / t Angular velocity: = / t Acceleration: a = v/ t Angular acceleration: = / t Mass: m Moment of inertia: I Force Torque Newton's 2nd law: F = ma Newtons’s 2nd law: = I We can relate these rotational quantities to those analogues linear ones: Linear or tangential velocity: v=r Tangential or linear acceleration: a = r Torque: This is the rotational analogue to a linear force. Torque causes rotations. Torque is related to force by the following equation: = F r sin = F r sin sin = d/r so then torque becomes: = F d We refer to d as the lever arm. F d r What if = 90o? The torque becomes: = F r Moment of Inertia is the rotational analogue of mass, m I (point mass) = Mr2 I (ring) = Mr2 I (disk) = ½ Mr2 What is the moment of inertia for the “dumbells” shown below? M r r M I (point mass) = Mr2 Moments of inertia add, so our total I for the two masses is: I = I1 + I2 = Mr2 + Mr2 = 2Mr2 What is the effect on I if a triple r? r 3r I = I1 + I2 = M(3r)2 + M(3r)2 = 9Mr2 + 9Mr2 = 18 Mr2 We increased I by a factor of 9!! How do we find the moment of inertia for the disk in this situation? After drawing the FBD, we can write Newton’s 2nd Law for the block: r F ma mg T ma T m Next we write Newton’s 2nd law for the rotating disk, and since the disk is rotating we need to use the rotational form of Newton’s 2nd law: I I Which force is causing the disk to raotate? It’s the force Associated with the tension, T in the string so we can write: I rT I mg remember t hat linear accelerati on : a r a rT I r a r If we use the equation for the block we can solve for tension, T: T mg ma a rT I r a And we get: r ( mg ma) I r mr 2 ( g a) Now solve for I: I a Substitute this equation back into : If instead we solve for 1/a from this equation, we get: 1 I 1 1 2 a gr m g