實驗3:轉動-剛體的轉動運動Lab. 3 : Rotation
advertisement

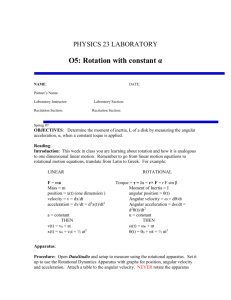
實驗3:轉動-剛體的轉動運動 Lab. 3 : Rotation -Rotational Motion of Rigid Body 實驗目的:測量作用在圓盤上之力矩所產生的角加速 度和角速度的大小 證明剛體繞固定軸所做的轉動運動,亦遵守牛頓第二 運動定律。 並探討轉動物體的能量守恆關係。 Object: To measure angular acceleration and angular velocity of a rotating rigid disk applied by a torque . To prove the rotational motion of a rigid body obey the Newtonian 2nd motional law. The rotational motion also obeys the conservation PhysicsNTHU ofMFTai-戴明鳳 energy. HyperPhysics Most fundamental concepts are subtracted from the web site: http://hyperphysics.phy-astr.gsu.edu/hbase/hframe.html PhysicsNTHU MFTai-戴明鳳 Rotational Dynamics http://hyperphysics.phy-astr.gsu.edu/hbase/hframe.html PhysicsNTHU MFTai-戴明鳳 Circular / Rotational Motion For circular motion at a constant speed v, the centripetal acceleration of the motion can be derived. PhysicsNTHU http://hyperphysics.phy-astr.gsu.edu/hbase/circ.html#rotcon MFTai-戴明鳳 Basic Rotational Quantities The angular displancement is defined by: For a circular path it follows that the angular velocity is The angular acceleration: i.e., Tangential acceleration: Centripetal acceleration: PhysicsNTHU MFTai-戴明鳳 Radian and Conversions q is a pure number, but commonly is given the artificial unit, radian. One radian: is the angle subtended by an arc length equal to the radius of the arc (s = r). Conversion between degrees and radians PhysicsNTHU MFTai-戴明鳳 Angular Displacement The angular displacement is defined as the angle the object rotates through during some time interval. This is the angle that the reference line of length r sweeps out. Fig 10.2 PhysicsNTHU MFTai-戴明鳳 Average Angular Speed & Instantaneous Angular Speed The average angular speed, , of a rotating rigid object is the ratio of the angular displacement to the time interval. The instantaneous angular speed is defined as the limit of the average speed as the time interval approaches zero. Units: radians/sec, rad/s or s-1 (radians have no dimensions) > 0: for q increasing (counterclockwise) < 0: for q decreasing (clockwise) PhysicsNTHU MFTai-戴明鳳 Average and Instantaneous Angular Acceleration The average angular acceleration, , of an object is defined as the ratio of the change in the angular speed to the time it takes for the object to undergo the change. The instantaneous angular acceleration is defined as the limit of the average angular acceleration as the time goes to 0 Units of angular acceleration are rad/s2 or s-2 since radians have no dimensions. PhysicsNTHU MFTai-戴明鳳 Angular Motion, General Notes When a rigid object rotates about a fixed axis in a given time interval, every portion on the object rotates through the same angle in a given time interval and has the same angular speed and the same angular acceleration. – So q, , all characterize the motion of the entire rigid object as well as the individual particles in the object. Directions of Strictly speaking, the speed and acceleration (, ) are the magnitudes of the velocity and acceleration vectors. The directions are actually given by the right-hand rule. PhysicsNTHU Fig 10.3 MFTai-戴明鳳 Rotational Kinematics Under constant angular acceleration, the motion of the rigid object can be described using a set of kinematic equations. – These are similar to the kinematic equations for linear motion. – The rotational equations have the same mathematical form as the linear equations. Rotational Kinematic Equations PhysicsNTHU MFTai-戴明鳳 Comparison Between Rotational and Linear Equations PhysicsNTHU MFTai-戴明鳳 Relationship Between Angular and Linear Quantities Displacements Speeds Accelerations Every point on the rotating object has the same angular motion. Every point on the rotating object does not have the same linear motion. PhysicsNTHU MFTai-戴明鳳 Speed Comparison The linear velocity is always tangent to the circular path. – called the tangential velocity The magnitude is defined by the tangential speed. Fig 10.4 PhysicsNTHU MFTai-戴明鳳 Tangential Acceleration Centripetal Acceleration Fig 10.5 An rotating rigid object traveling in a circle, even though it moves with a constant speed, will have an centripetal acceleration: PhysicsNTHU MFTai-戴明鳳 Resultant Acceleration Tangential component of the acceleration change speed Centripetal component of the acceleration change direction Total acceleration: PhysicsNTHU MFTai-戴明鳳 Notes for Speed and Acceleration All points on the rigid object will have the same angular speed, but not the same tangential speed. All points on the rigid object will have the same angular acceleration, but not the same tangential acceleration. The tangential quantities depend on r, and r is not the same for all points on the object. PhysicsNTHU MFTai-戴明鳳 Torque vs. Force = I vs. F = ma Forces can cause a change in linear motion. – Described by the Newton’s Second Law Torque can cause a change in rotational motion. – The effectiveness of this change depends on the force and the moment arm. – The change in rotational motion depends on the torque. – Also obey the Newton’s 2nd Motional Law PhysicsNTHU MFTai-戴明鳳 Torque Be the vector product or cross product of two vectors r and F. SI units of torque: N.m Torque is a force multiplied by a distance, it is very different from work and energy (unit: Joules). Fig 10.12 PhysicsNTHU MFTai-戴明鳳 Definition of Vector Product Any two vectors, The vector product and = Fig 10.13 The direction of C is given by the right-hand rule. PhysicsNTHU MFTai-戴明鳳 Conditions for Equilibrium An object at equilibrium has no net influences to cause it to move, either in translation (linear motion) or rotation. The basic conditions for equilibrium are: PhysicsNTHU MFTai-戴明鳳 Rotational-Linear Parallels PhysicsNTHU MFTai-戴明鳳 The Rigid Object In Equilibrium Fig 10.15 (a) & (b) PhysicsNTHU MFTai-戴明鳳 Moment of Inertia, Rotational inertia Moment of inertia (rotational inertia) ~ mass for linear motion. It appears in the relationships for the dynamics of rotational motion. The moment of inertia must be specified with respect to a chosen axis of rotation. For a point mass the moment of inertia is just the mass times the square of perpendicular distance to the rotation axis, I = mr2. That point mass relationship becomes the basis for all other moments of inertia since any object can be built up from a collection of point masses. PhysicsNTHU MFTai-戴明鳳 Moment of Inertia Dimensions: ML2, SI units: kg.m2 It is more easily to calculate the moment of inertia of an object by assuming it is divided into many small volume elements, each of mass Dmi. For continuous body, If r is constant, the integral can be evaluated with known geometry, otherwise its variation with PhysicsNTHU position must be known. MFTai-戴明鳳 PhysicsNTHU MFTai-戴明鳳 PhysicsNTHU MFTai-戴明鳳 Fig 10.7 PhysicsNTHU MFTai-戴明鳳 Parallel Axis Theorem The I (rotational inertia) of any object about an axis through its center of master (C.M.), Icm, is the minimum moment of inertia for an axis in that direction in space. The moment of inertia about any axis parallel to that axis through the C.M. is given by the parallel axis theorem. The expression added to the Icm will be recognized as the moment of inertia of a point mass - the moment of inertia about a parallel axis is the center of mass moment plus the moment of inertia of the entire object treated as a point mass PhysicsNTHU at the center of mass. MFTai-戴明鳳 Analogy between Rotational & Linear Kinetic Energies, KErotational & KELinear For a given fixed axis of rotation, the rotational kinetic energy can be expressed in the form a rotating object is analogous to KELinear and can be expressed in terms of the moment of inertia and angular velocity. The total kinetic energy of an extended object can be expressed as the sum PhysicsNTHU of the translational kinetic energy of the center of mass and the rotational MFTai-戴明鳳 kinetic energy about the center of mass. KErotational Work-Energy Principle The expressions for KErotational & KELinear kinetic energy can be developed in a parallel manner from the workenergy principle. Consider the following parallel between a constant torque exerted on a flywheel with moment of inertia I and a constant force exerted on a mass m, both starting from rest. PhysicsNTHU MFTai-戴明鳳 Rotational Kinetic Energy of the rigid object The total rotational kinetic energy is the sum of the energies of all its particles: [units: Joules (J)]: where I is called the moment of inertia Be similar to the linear kinetic energies associated with motion (K = 1/2mv2) Be not a new type of energy, the form is different because it PhysicsNTHU is applied to a rotating object. MFTai-戴明鳳 For the linear case, starting from rest, the acceleration from Newton's second law is equal to the final velocity divided by the time and the average velocity is half the final velocity, showing that the work done on the block gives it a kinetic energy equal to the work done. For the rotational case, also starting from rest, the rotational work is τθ and the angular acceleration α given to the flywheel is obtained from Newton's second law for rotation. The angular acceleration is equal to the final angular velocity divided by the time and the average angular velocity is equal to half the final angular velocity. It follows that the rotational kinetic energy given to the flywheel is equal to the work done by the torque. PhysicsNTHU MFTai-戴明鳳 Work-Energy Principle This is a general principle which can be applied specifically to rotating objects. For pure rotation, the net work is equal to the change in rotational kinetic energy and for a constant torque, the work can be expressed as For a net torque, Newton's 2nd law for rotation gives Combining this expression gives a useful relationship for describing rotational motion. PhysicsNTHU MFTai-戴明鳳 Rolling Objects without Slipping The K.E. (kinetic energy) is divided between linear kinetic energy and rotational kinetic energy. Another key is that for rolling without slipping, the linear velocity of the center of mass is equal to the angular velocity times the radius. PhysicsNTHU MFTai-戴明鳳 Rotation Vector Examples This is an active graphic. Click on any example. http://hyperphysics.phy-astr.gsu.edu/hbase/hframe.html PhysicsNTHU MFTai-戴明鳳 原理(Principle) 物體對旋轉軸轉動(Body rotates about a fixed rotational axis) : 角位移(angular displacement): q [rad] [360o = 2p radians] 角速度(angular velocity): = dq/dt [rad/s] 角加速度(angular acceleration): = d/dt = d2q/dt2 [rad/s2] 外力矩(torque) = r x F (F: 作用力, r : 外力與原點距離) [m.N] then or = I = dL/dt 比率常數: 對轉動軸之轉動慣量(rotational inertia): I [kg.m2] I = Simiri2 = rr2dV mi: 質量, ri: 質量與原點距離, r: 均勻質量密度, r: 與原點距離, dV: 體積單元 力矩(torque) = constant, = constant 等角加速度運動 力矩 = 0, = 0, L = constant, = constant 等角速度運動 PhysicsNTHU MFTai-戴明鳳 (例) 均勻剛體(rigid body)圓盤(disc)或圓柱(質量M, 半徑R) I = MR2/2 (旋轉軸為通過圓心原點之垂直軸) I = MR2/2 + Mh2 (旋轉軸為距圓心距離h之垂直軸) 實驗: 基本設計 利用水平氣墊桌上無摩擦之圓盤(含輪軸及輪軸架)轉動 (非均勻圓盤/旋轉軸通過圓心, I MR2/2) 輪軸(小輪軸或大輪軸)上纏繞細繩, 經滑輪懸吊砝碼質量m 圓盤(含輪軸及輪軸架)受力矩[旋轉軸z軸/右手定則/逆時針轉動]: = r x T = I (r = r1 = 1 cm or r2 = 2 cm, T: 水平繩張力) T = I/r [r x T = rTsinq z= rTz, if q = 90o] 砝碼受力(氣墊水平, 無摩擦時)[方向-z軸] Fnet = mg - T = ma = mr (a = r) 角加速度[旋轉軸z軸] = mgr/(I + mr2) [討論滑輪等摩擦力f] PhysicsNTHU MFTai-戴明鳳 1.小輪軸(small rotational axis) 2.次小輪軸(other rotational axis) 3.外側插栓(outer insert pin) 4.內側插栓(Inner insert pin) 5.送風口(Wind port) 6.滑輪(frictionless pulley) T = mg 7.輪軸架(Pulley support) 8.圓盤(Turntable Disc) 圖2 氣墊桌裝置 9.砝碼(weights) (Fig.2 Air Bearing Turntable) 10.摩擦橡皮圈(Resist elastic band) PhysicsNTHU 11.氣墊桌(Air Table) MFTai-戴明鳳 頂視圖 (Top view) 1.小輪軸(small rotational axis) 2.次小輪軸(other rotational axis) 3.外側插栓(outer insert pin) 4.內側插栓(Inner insert pin) 7.輪軸架(Support of rotation axis ) 8.圓盤(Disc) 9.砝碼(weights) mg – T = ma T = mg – ma a=r T = mg - m r Tension, T = mg T is the force applied by the weight , mg. PhysicsNTHU MFTai-戴明鳳 mg – T = ma T = mg – ma a=r T = mg - m r If friction force, f = 0 = Tr = (mg mr )r = I If friction force, f 0 (mg f mr ) = I PhysicsNTHU MFTai-戴明鳳 實驗流程: 利用氣墊桌系統 (保護儀器:送風後才將圓盤放上) A. 角加速度測量: 固定輪軸半徑(r1 or r2)及砝碼質量(m1, m2 or m3) 角位移 θ (圈數): 1/4, 1/2, 1, 3/2, … (1 圈 = 2p rad) 測量時間 t (s): t1, t2, t3, t4,… 角速度 (rad/s): 1, 2, 3, 4, … (平均值) 角加速度 : 等角加速度運動? 畫圖: θ(t2) : 通過原點之直線(θ = t2/2 ) (t ) : 通過原點之直線( = t ) 求不同輪軸半徑 (r1, r2) 及砝碼質量 (m1, m2, m3) 時, 所獲得的角加速度 (1, 2, 3, 4, 5, 6) 估計力矩值 = r x T = r (mg – ma) ~ rmg (if a << g) PhysicsNTHU (t1, t2, t3, t4, t5, t6) MFTai-戴明鳳 計算慣性矩 I ? 畫 () 圖: 理論上是通過原點、斜率= I 的直線 = I 故求斜率即可得慣性矩 I 與其它方法求得之 I = 13.3 g.m2 比較之 B. 驗證 = I 輪軸半徑 r 及砝碼質量 m 固定 固定力矩: = r x F ~ rmg ~ constant 改變轉動慣量(慣性矩) I 值, 求角加速度變化。 PhysicsNTHU MFTai-戴明鳳 利用輪軸架兩組插栓(內,外),使之安置在離旋轉軸不 同的距離的位置上 h1, h2 可改變轉動慣量(慣性矩) I 值 圓柱體(質量mc, 內徑ri, 外徑ro)放進插栓,一次放兩個, 保持平衡,增加之慣性矩 Ic = Icm + mch2 = mc(ro2 - ri2)/2 + mch2 (x2, 一次放兩個) 總轉動慣量= Itotal = I + 2Ic 求不同插栓距離(h1, h2)及圓柱體質量(mc1, mc2)之角加 速度 Itotal = = rmg? [畫圖或列表] PhysicsNTHU MFTai-戴明鳳 C. 由角速度求角加速度 調整細繩長度, 使砝碼m由高度h加速落下著地時, 細繩 恰好脫離輪軸(半徑r) 此時力矩 = 0 ( = 0) 圓盤轉動不在外力和力矩作用,變成等角速度()運動 2 – 02 = 2qt 因 0 = 0, 總角位移 qt = h/r (rad) T 故 = 2r/2h m 測量等角速度運動之頻率 f 或週期 T = 2pf = 2p/T 代入求角加速度 ,與A的結果比較。 h PhysicsNTHU MFTai-戴明鳳 D. 能量守恆 無摩擦時: 重力位能 = 轉動動能 + 平移動能 mgh = I2/2 + mv2/2 末速v (Final veclocity) = r T m h PhysicsNTHU MFTai-戴明鳳