ESE406/505-MEAM513: Lecture 1
Introduction to Feedback and Control
Ali Jadbabaie
January 11, 2005
Goals:
Give an overview of the course; describe course structure, administration
Define feedback/control systems and learn how to recognize main features
Describe what control systems do and the primary principles of control
Reading (available on course web page):
Astrom and Murray, Analysis and Design of Feedback Systems, Ch 1
“For the Spy in the Sky, New Eyes”, NY Times, June 2002.
Course Administration
Announcements :
•First class is on Tuesday January 13th 2004 in Towne 313 from 12:00-1:30pm.
Course Description: This course is an introduction to analysis and design of feedback control systems,
including classical control theory in the time and frequency domain. Modeling of physical, biological and
information systems using linear and nonlinear differential equations. Stability and performance of interconnected systems,
including use of block diagrams, Bode plots, Nyquist criterion, and Design of feedback controllers.
Suggested pre-requisites: Basic course on ordinary differential equations and linear algebra.
For Systems Engineering Students: knowledge of ESE 210 (SYS 200) material.
For EE students: Knowledge of signals and systems (ESE 325)
Instructor:
•Ali Jadbabaie , jadbabai@seas.upenn.edu ,
Office hours : Wednesdays 2:00-4:00pm, 365 GRW Moore bldg.
Lectures: T- TR 12:00-1:30pm, Towne 313.
Textbook:
•Feedback Control of Dynamic Systems, by Franklin, Powell and Emami Naieni, 4th Edition, Prentice Hall, 2002.
Other References:
•Modern Control Engineering, 4th Edition, by K. Ogata, Prentice Hall, 2001
•Modern Control Systems, 9th Edition, by Dorf and Bishop, Prentice Hall, 2001.
•Automatic Control Systems, by B. Kuo, Prentice Hall, 1995.
Course Notes and Links Reading material for the class will be posted on blackboard
Required reading sources
•R. M. Murray (ed), Control in an Information Rich World: Report of the Panel on Future Directions in Control,
Dynamics, and Systems, SIAM, 2002. Available online at http://www.cds.caltech.edu/~murray/cdspanel/
•K. J. Åström and Richard M. Murray, Analysis and Design of Feedback Systems, Preprint, 2004. Online access on blackboard
•J. Doyle, B. Francis, and A. Tannenbaum, Feedback Control Theory, McMillan, 1992. Online access on blackboard
•Grading : Homeworks : 20% Midterm I: 35% Midterm II : 45%
•Teaching assistants: Nima Moshtagh , Ali Ahmadzadeh
January 11, 2005
1
Controls Course Sequence
Fall
ESE500 – Linear Systems Theory
Detailed description of state space concepts.
Rigorous analysis and synthesis of time invariant and time varying
systems.
Spring
ESE406/505-MEAM513 – Introduction to the principles and tools of
control and feedback
Summarize key concepts, w/ examples of fundamental principles at work
Introduce MATLAB-based tools for modeling, simulation, and analysis
Introduction to control design
Provide knowledge to work with control engineers in a team setting
ESE 617/MEAM 613- Nonlinear Systems
• Tools and algorithms for analysis and design of nonlinear control systems
January 11, 2005
2
What is Feedback?
Miriam Webster:
the return to the input of a part of the
output of a machine, system, or
process (as for producing changes in
an electronic circuit that improve
performance or in an automatic control
device that provide self-corrective
action) [1920]
Feedback = mutual interconnection
of two (or more) systems
System 1 affects system 2
System 2 affects system 1
Cause and effect is tricky; systems
are mutually dependent
Feedback is ubiquitous in natural
and engineered systems
January 11, 2005
System 1
System 2
Terminology
System 1
System 1
System 2
System 2
Closed
Loop
Open
Loop
3
What do these two have in common?
Boeing 777
Tornado
• Highly nonlinear, complicated dynamics!
• Both are capable of transporting goods and people over long distances
BUT
• One is controlled, and the other is not.
• Control is “the hidden technology that you meet every day”
• It heavily relies on the notion of “feedback”
January 11, 2005
4
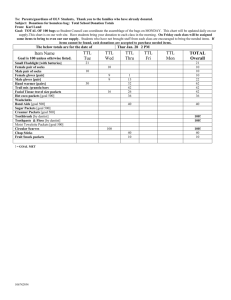
Example #1: Flyball Governor
“Flyball” Governor (1788)
Regulate speed of steam engine
Reduce effects of variations in load
(disturbance rejection)
Major advance of industrial revolution
Balls fly out
as speed
increases,
Valve closes,
slowing engine
Steam
engine
Boulton-Watt steam engine
January 11, 2005
Flyball
governor
http://www.heeg.de/~roland/SteamEngine.html
5
Other Examples of Feedback
Biological Systems
Physiological regulation (homeostasis)
Bio-molecular regulatory networks
Environmental Systems
Microbial ecosystems
Global carbon cycle
Financial Systems
Markets and exchanges
Supply and service chains
January 11, 2005
ESE
6
Control = Sensing + Computation + Actuation
In Feedback “Loop”
Actuate
Sense
Gas Pedal
Vehicle Speed
Compute
Control “Law”
Goals
Stability: system maintains desired operating point (hold steady speed)
Performance: system responds rapidly to changes (accelerate to 65 mph)
Robustness: system tolerates perturbations in dynamics (mass, drag, etc)
January 11, 2005
7
A modern Feedback Control System
January 11, 2005
8
Two Main Principles of Control
Robustness to Uncertainty through
Feedback
Feedback allows high performance in the
presence of uncertainty
Example: repeatable performance of
amplifiers with 5X component variation
Key idea: accurate sensing to compare
actual to desired, correction through
computation and actuation
Design of Dynamics through Feedback
Feedback allows the dynamics of a
system to be modified
Example: stability augmentation for highly
agile, unstable aircraft
Key idea: interconnection gives closed
loop that modifies natural behavior
X-29 experimental aircraft
January 11, 2005
9
Example #2: Cruise Control
disturbance
reference
mv bv uengine uhill
uengine k (vdes v )
velocity
vdes
vss
k
1
vdes
uhill
bk
bk
1 as
k
0 as
k
time
January 11, 2005
+
-
Control
+
System
Stability/performance
Steady state velocity approaches
desired velocity as k
Smooth response; no overshoot or
oscillations
Disturbance rejection
Effect of disturbances (hills)
approaches zero as k
Robustness
Results don’t depend on the specific
values of b, m, or k for k sufficiently
large
10
Example #3: Insect Flight
SENSING
neural
superposition
eyes
hind wing
gyroscopes
(halteres)
specialized
“power”
muscles
two wings
(di-ptera)
ACTUATION
COMPUTATION
~500,000 neurons
January 11, 2005
More information:
M. D. Dickinson, Solving the mystery of
insect flight, Scientific American, June
2001.
11
EXAMPLE # 4: Coordinated Control of Manned
and Unmanned Systems
January 11, 2005
12
Other
Examples
Temperature control
Air bags
EGR control
Active
suspension
Electronic fuel injection
Electronic ignition
Electric power
steering (PAS)
January 11, 2005
Anti-lock brakes
Electronic
transmission
Cruise control
13
Steering
Brakes
Anti-skid
Cruise control
Traction control
Shifting
Electronic ignition
Wipers Mirrors
GPS
Temperature control
Electronic fuel injection
Seatbelts
Bumpers Fenders
Suspension (control) Airbags
January 11, 2005
Radio
Headlights
Seats
14
Gene networks?
essential:
nonessential:
unknown:
total:
January 11, 2005
230
2373
1804
4407
http://www.shigen.nig.ac.jp/ecoli/pec
15
essential:
nonessential:
230
2373
Are these
“redundant?”
No!
January 11, 2005
16
Cartoon of E.
Coli metabolism
January 11, 2005
Regulatory
feedback
17
Regulatory
feedback
January 11, 2005
18
Actuation
Decision
January 11, 2005
Sensing
Signaling
19
Organized complexity
Simple behavior
Robust and adaptive
Evolvable
Enormous “hidden” complexity
January 11, 2005
20
Segway: The human Transporter
January 11, 2005
21
January 11, 2005
22
Modern Engineering Applications of Control
Flight Control Systems
Modern commercial and military
aircraft are “fly by wire”
Autoland systems, unmanned
aerial vehicles (UAVs) are already
in place
Robotics
High accuracy positioning for
flexible manufacturing
Remote environments: space, sea,
non-invasive surgery, etc.
Chemical Process Control
Regulation of flow rates,
temperature, concentrations, etc.
Long time scales, but only crude
models of process
Communications and Networks
Amplifiers and repeaters
Congestion control of the Internet
Power management for wireless
communications
Automotive
Engine control, transmission
control, cruise control, climate
control, etc
Luxury sedans: 12 control devices
in 1976, 42 in 1988, 67 in 1991
AND MANY MORE...
January 11, 2005
23
The Internet: Largest feedback system built by man
Applications
Web
FTP
Mail
News
Video
Audio
ping
napster
Transport protocols
TCP SCTP UDP
ICMP
IP
Ethernet 802.11
Power lines ATM
Optical
Satellite Bluetooth
Link technologies
January 11, 2005
24
The Internet hourglass
Applications
Web
FTP
Mail
News
Video
Audio
ping
napster
TCP
IP
Ethernet 802.11
Power lines ATM
Optical
Satellite Bluetooth
Link technologies
January 11, 2005
25
The Internet hourglass
Applications
Web
FTP
Mail
News
Video Audio
IP under
everything
ping
napster
TCP
IP
Ethernet 802.11
IP on
Power lines ATM Optical
everything
Satellite Bluetooth
Link technologies
January 11, 2005
26
Network protocols.
Files
HTTP
Files
TCP
IP
packets
packets
packets
packets
packets
packets
Links
Sources
January 11, 2005
27
Protocol stack
Applications
TCP
IP
Hardware
January 11, 2005
Modules
Files
packets
packets
packets
packets
packets
TCP
packets
packets
packets
packets
packets
IPpackets
packets
packets
packets
packets
packets
Layerpackets
2 packets
packets
packets
packets
packets
packets
Bits
28
Animation of the protocols
Files
HTTP
Files
TCP
packets
packets
packets
packets
packets
TCP
packets
January 11, 2005
29
Animation of the protocols
Files
HTTP
Files
TCP
packets
packets
packets
packets
packets
TCP
packets
IP
packets
packets
packets
packets
packets
TCP
packets
packets
packets
packets
packets
packets
packets
January 11, 2005
30
Animation of the protocols
Files
HTTP
Files
TCP
packets
packets
packets
packets
packets
TCP
packets
packets
packets
packets
packets
IPpackets
packets
IP
packets
packets
packets
packets
packets
TCP
packets
packets
packets
packets
packets
IPpackets
packets
packets
packets
packets
packets
packets
Layer
2 packets
Links
Sources
January 11, 2005
packets
packets
packets
packets
packets
Bits
31
TCP
IP
January 11, 2005
Vertical decomposition
Protocol Stack
Application
IP
Application
Application
Each layer can evolve
TCP
TCP
independently provided:
1. Follow the rules
2. Everyone else does
IP
IP with IP
“good enough”
their layer
Routing
Provisioning
32
Application
Application
TCP
TCP
IP
Application
IP
IP
TCP
IP
IP
Horizontal decomposition
Each level is decentralized and asynchronous
January 11, 2005
Routing
Provisioning
33
Vertical decomposition
• Entirely different from the telephone system,
although the parts are essentially identical (VLSI,
Application
Application
Application
copper, and fiber)
• The Internet is much more like biology and
TCPrelies on feedbackTCP
TCP
regulation at every level.
• Only recently has a coherent theory of the
Internet started to emerge and pay off.
IP
IP
IP
IP
IP
January 11, 2005
Routing
Horizontal
decomposition
Provisioning
34
Internet
Interface
Application
Application
TCP
TCP
Operating
System
Simplify
IP
IP
Computer
Board
Device
January 11, 2005
Link
35
Links
Sources
January 11, 2005
36
Routers
packets
January 11, 2005
Hosts
37
Files
Routers
Hidden from the user
packets
January 11, 2005
Hosts
38
Routers
packets
January 11, 2005
Hosts
39
Routers
packets
January 11, 2005
Hosts
40
Control Tools
Modeling
Input/output representations for subsystems +
interconnection rules
System identification theory and algorithms
Theory and algorithms for reduced order modeling
+ model reduction
Analysis
Stability of feedback systems, including
robustness “margins”
Performance of input/output systems (disturbance
rejection, robustness)
Synthesis
Constructive tools for design of feedback systems
Constructive tools for signal processing and
estimation (Kalman filters)
January 11, 2005
MATLAB Toolboxes
SIMULINK
Control System
Neural Network
Data Acquisition
Optimization
Fuzzy Logic
Robust Control
Instrument Control
Signal Processing
LMI Control
Statistics
Model Predictive Control
System Identification
µ-Analysis and
Synthesis
41
Magic of Feedback
• Feedback is used to regulate the value of a quantity in a system to a desired
level, by measuring the error, i.e., difference between the desired value and the
sensed value.
•Sometimes the decision is based on the instantaneous value of error, and
sometimes is based on the history of the error, and/or predictions on the future
value of the error. Some times we use all three.
•The performance of a feedback system is measured based on the response to a
“step” change in the reference, or in tracking a sinusoid.
• Feedback regulation will work even when the “components” are uncertain.
• The down side of using feedback is that
It can cause instability
It makes the design more complicated
• The main components of a feedback loop are sensing, decision/computation, and
actuation.
• We will use theory of differential equations, linear algebra and complex variables
to analyze feedback systems.
January 11, 2005
42
Overview of the Course
Wk
1
2-3
Tue/Thur
Introduction to Feedback and Control
System Modeling/Analysis,
Review of ODEs, and Laplace Transform
January 11, 2005
4-5
Stability and Performance
6-7
Tests for stability
8-9
Root locus analysis. Design for time
domain specs.
1011
Frequency Domain Design: Bode plot.
1214
Loop Analysis of Feedback Systems.
Nyquist criterion
15
Fundamental Limits on Performance
16
Uncertainty Analysis and Robustness
43
Summary: Introduction to Feedback and Control
Actuate
Sense
Control =
Sensing + Computation +
Actuation
Feedback Principles
Robustness to Uncertainty
Design of Dynamics
Compute
Many examples of feedback and control in natural & engineered systems:
BIO
ESE
BIO
ESE
CS
January 11, 2005
44
Summary
Feedback control is Every where
you just have to look for it
January 11, 2005
45
Welcome to
ESE406/505- MEAM513
Control Systems
Instructor: Ali Jadbabaie
jadbabai@seas.upenn.edu
Course website:
on Blackboard
January 11, 2005
46
 0
0