receive - Renesas

Course Introduction
Purpose
• This training course provides an overview of the CAN peripheral in Renesas M16C and R8C microcontrollers that is used to build networked, multiprocessor embedded systems, and the Application Programming Interface (API) used to program that on-chip CAN peripheral.
Objectives
• Get an introduction to the Renesas M16C and R8C CAN peripheral hardware.
• Understand how to program the CAN peripheral using the
Renesas API function calls.
Content
• 29 pages
• 4 questions
Learning Time
• 45 minutes
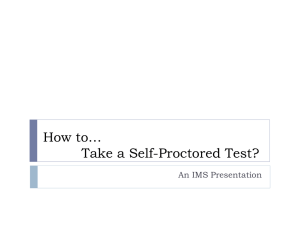
M16C/R8C MCU CAN Peripheral
CAN bus timing control register
MCU data bus
CAN control register
Message control registers 0 to 15
CAN global mask register
CAN local mask register A
CAN local mask register B
CTx
To/From
External CAN
Transceiver
Protocol controller
CRx
Wakeup logic
Acceptance filter slots 0 to 15
16-bit timer
Timestamp register
(not in R8C/23)
CAN receive error count register
CAN transmit error count register
CAN status register
CAN slot status register
MCU data bus
CAN interrupt control register
CAN extended
ID register
Message boxes
(Slots 0 to 15)
• Message ID
• DLC
• Data field
• Timestamp
Interrupt control logic
CAN receive complete
CAN transmit complete
CAN error
CAN wakeup
Message Boxes
.
Communication performed via CAN message boxes:
• Message boxes
– Transmit and receive buffers for CAN messages
– Comprise 16 slots of 16 bytes
(or 8 words) each
– Slots 14 and 15 can be used for
BasicCAN slots
• Individual slots can be set as transmit or receive slots by a program
• During both transmit and receive operation, slots with the lowest numbers have highest priority; i.e., priority increases as slot number decreases
• Each slot retains its previous contents until a new message is sent or received
0068
16
0069
16
006A
16
006B
16
006C
16
006D
16
006E
16
006F
16
0060
16
0061
16
0062
16
0063
16
0064
16
0065
16
0066
16
0067
16
Message ID
(Standard, Extended)
DLC
(6 Bytes)
Data Field
(8 Bytes)
Timestamp Value
(2 Bytes)
Interrupt Control Logic
Interrupt sources:
• CAN receive complete
• CAN transmit complete
• CAN error (error passive state, bus off state, bus error)
• CAN wakeup
Related registers:
• Interrupt control registers (C0RECIC, C0TRMIC, C01ERRIC, [C01WKIC])
– Set priority levels for interrupt sources listed above
• CAN interrupt control register (C0IRC)
– Enables and disables interrupts for individual message box slots
An interrupt service function must be declared with ‘pragma’ somewhere in the program.
Examples:
#pragma INTERRUPT /B fnc_c0recic();
#pragma INTERRUPT /B fnc_c0trmic();
Renesas M16C CAN peripheral API
can_initial ( ) config_can ( ) set_bitrate_can ( ) set_mask_can ( )
Initialization functions set_trm_std_dataframe_can ( slot_nr, dataframe* ) check_trm_std_dataframe_can ( slot_nr)
– if polling fnc_c0trmic ( )
– if using interrupts
Transmit functions set_rec_std_dataframe_can ( slot_nr, id ) check_rec_success_can ( slot_nr, dataframe* )
– if polling fnc_c0recic ( )
– if using interrupts get_message_can ( slot_nr, dataframe* ) check_err_can ( ) abort_trm_can ( slot_nr ) check_hw_tmr_can ( canblock1_tmo_diag* )
Receive functions
Error functions
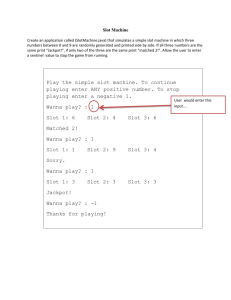
config_can ( )
Initializing CAN Peripheral
CAN Configuration Procedure
START
Enter CAN reset/ initialization mode
Exit CAN sleep mode
• Transition to CAN reset/ initialization mode
• Enable CAN ports
• Set operating mode
• Set bit timing and baud rate
• Set mask registers
• Transition to CAN operating mode
CAN reset mode?
YES
Enable CAN ports
Set CAN control register
- Loopback mode select bit
- Message order select bit
- Basic CAN mode select bit
- Bus error interrupt enable bit
- Timestamp prescaler
NO
Set CAN bit timing and baud rate
Set mask register
Go to CAN operation mode
If using CAN interrupts
Enable CAN interrupts
START
Clear interrupt enable flag
Set interrupt priority level
Set interrupt enable flag
END
NO
CAN operation mode?
YES
END
Set Baud Rate and Bit Timing
set_bitrate_can ( )
• Cancel register protect
• Set divide ratio for CAN clock
• Set register protect
• Set dividing ratio for prescaler
• Set sampling count
• Set sampling points PTS, PBS1,
PBS2, and SJW
Setting CAN bit timing and baud rate
START
Clear protect register
Set CAN clock divide-by-N value
Set protect register
Set:
• Prescaler divide-by-N value
• Sampling count
• PTS, PBS1, PBS2, SJW
END
Question
Is the following statement true or false? Click Done when you are finished.
“The R8C/M16C CAN peripheral provides 16 message boxes, each of which has transmit and receive buffers. The message buffers comprise
16 slots of 16 bytes (or 8 words).”
True
False
Done
Data Frame Transmit Mode set_trm_std_dataframe_can ( slot_nr, dataframe* )
Sets up a slot to transmit:
1.
Check if transmit possible [ “TrmActive” = 0?]
2. Clear message control register
3. Prohibit interrupts for slot (if using TX interrupts)
4. Select standard or extended ID
5. Set TX-ID
6. Byte count of transmit data (set DLC)
7. Set transmit data
8. Interrupt enable the slot (if using TX interrupts)
9. Transmit data frame
If multiple slots are set to data frame transmit mode simultaneously, they transmit in order, starting with slot with lowest number
Verify Successful Transmission fnc_c0trmic ( )
Performs successful data frame transmit interrupt routine:
• Sets a flag so main program knows what data was successfully sent out
• Notify application
• Flash an LED, etc.
Confirming Successful
Transmission using an Interrupt
CAN successful transmission interrupt routine START
Check that slot finished sending
Notify application etc.
CAN successful transmission interrupt routine END
Keep interrupt code short to avoid blocking other interrupts.
Transmit Abort
Applying a time limit to message transmission
Receiving Message transmission
Error
Error frame
Arbitration loss
Message retransmission Reception
Transmit abort request
Time limit
Transmit request
Transmitting the highest-priority message
Arbitration loss
Message (1) transmission Reception Message (2) transmission
Transmit abort request Transmission request for now highest priority message (2)
Transmit Abort abort_trm_can ( in_slot )
• Transmit incomplete? “SentData” = 0?
• Transmit abort request “TrmReq” 0
• When transmit abort complete, transmit highest-priority message
Abort transmission procedure
START
Transmit requested?
YES
Request abort transmission
NO
YES
Being transmitted?
NO
Send priority message
END
Data Frame Receive set_rec_std_dataframe_can ( slot_nr, id )
Functions performed:
• Set up slot for receive
• Prohibit interrupts for slot
(if using RX interrupts)
• Set Standard or Extended ID
• Set RX-ID
• Clear message control register
• Set data frame receive mode
• Set RecReq to 1 to start receiving
• Enable interrupts for the receive slot
(if using RX interrupts)
Question
Which of the following functions is used to set up a slot to receive?
Select the response that applies and click Done.
a. set_rec_std_dataframe_can b. abort_trm_can c. set_trm_std_dataframe_can d. set_bitrate_can
Done
Mask Setting set_mask_can ( )
This function does the following:
• Accept one ID for message box => sets MASK to all ones
• Accept all messages => sets MASK to all zeros
• Accept range of messages => sets the ‘don’t-care’ bits of ID to zero in MASK
Example 1: Receiving standard data frame/ remote frame with ID 123 in CAN slot 0
Slot 0 sees on bus
Mask register
Received message
C0GMR
ID123
SID
10-6
0 0 1 0 0
1 1 1 1 1
0 0 1 0 0
SID
5-0
1 0 0 0 1 1
1 1 1 1 1 1
1 0 0 0 1 1
Example 2: Receiving standard data frames/remote frames with IDs 122 and 123 in CAN slot 0
SID
10-6
Slot 0 sees on bus
Mask register C0GMR
0 0 1 0 0
1 1 1 1 1
Received message
ID123
ID122
0 0 1 0 0
SID
5-0
1 0 0 0 1 X
1 1 1 1 1 0
1 0 0 0 1 1
0 0 1 0 0 1 0 0 0 1 0
Acceptance Filter Support Unit
The ASU function:
• Determines if received Standard IDs are valid
• Provides faster response than software filtering
Upper 8 bits of received ID
Received ID (11 bits)
Acceptance filter support registers
(ASU registers:
C0AFS, C1AFS)
Converted value of lower
3 bits of received ID
Register configuration during read operation b15 b8 b7 b0
CSID
7
CSID
6
CSID
5
CSID
4
CSID
3
CSID
2
CSID
1
CSID
0
SID
10
SID
9
SID
8
SID
7
SID
6
SID
5
SID
4
SID
3
Converted value of lower 3 bits of received ID Upper 8 bits of received ID
Receive Complete using Polling
Confirming by Polling
START
Finished receiving successfully?
YES
Process received message
NO
END
CAN slot status register or “NewData” in CAN message control register
Data received?
If yes: process received message
Note: Check for overruns!
Receive Complete using Interrupt fnc_c0recic ( )
• Copy data to buffer
• Notify main program that data was received
Confirming successful reception with a
CAN successful reception interrupt
CAN successful reception interrupt routine START
Check that the slot finished receiving successfully
Processing for received message
END
Received Message Processing check_rec_success_can ( slot_nr, dataframe )
• Checks whether or not received data to slot is complete
• Looks at receive complete flag (NewData)
get_message_can ( slot_nr, dataframe )
• Reads received message
• Checks for more received data before leaving (to reduce ‘nr’ of interrupts)
Dataframe = pointer to a dataframe structure
Question
Match each CAN API function to the most appropriate explanation by dragging the letters on the left to the correct locations on the right. Click Done when you are finished.
A set_trm_std_dataframe_can
B fnc_c0recic
C ASU
D fnc_c0trmic
D
Tells main application that message has been sent successfully
C
Determines if received Standard IDs are valid
B
Executed when an interrupt verifies successful data frame reception
A Sets up a slot to transmit
Done Reset
Show
Solution
Timestamp Function
This function:
• Automatically writes timestamp during normal receive operation
• Useful for determining sequence in which a group of messages was received
Standard cycle:
1-bit-time cycle
Prescaler
(Divide by 1, 2, 4, or 8)
Receive slot
Received ID
Received data
Timestamp
16-bit free-running counter
Cycle and initialization are programmable
Reset by software
What Slots Have New Data?
At system setup time:
(If the CAN receive interrupts are used)
1.
Set interrupt priority level
2.
Clear interrupt request bit
3.
Set slot ICR enable flag
4.
Set receive enable bit (I flag)
Running:
Polled message boxes - check which slots have new data
Receive interrupts - check Active Slot
Bits for which slot has received last
Received message processing
CAN receive interrupt control register (c0recic)
Flag registers
“NewData” in CAN message control register
CAN status register
Error Handling check_err_can ( )
Error Confirmation (Polling Processing)
CAN error generated?
CAN bus error handling :
• CAN error passive state?
– Error passive handling
• CAN bus off state?
– Bus off handling
Error Confirmation (Interrupt Processing)
CAN bus off state?
• CAN return from bus off
CAN status register
CAN Status Register
Error
Active
State
-Normal
Error passive state flag
Error bus off state flag Bus error state flag
Set if any
Error frame
CAN
Status
Register b15 b14 b13 b12 b11 b10 b2 b1 b0
Error!
Error!
Error!
Bus
Off
State
- too many errors stop transmitting
Error
Error
Passive
State
Data
Frames
Return From Bus Off State
Slot’s state changes when
- Slot receives 11 consecutive recessive bits 128 times
‘Return from bus off’ function is executed
Error
Active
State
CAUTION
- A node is supposed to go bus off if it is faulty. Use this function with care so a faulty node doesn’t keep coming back.
Bus
Off
State
‘Return from bus off’ function b11
CAN control register
1
Sets return from bus off bit to 1
Loopback Function
This function does the following:
• Allows confirmation of transmitted content
– Useful as self-diagnostic during debugging, etc.
Message transmission
Transmit Unit
Transmit slot
Receive slot
Same ID set for transmit and receive slot
Listen-Only Mode
Receive unit
(Listen-Only mode)
Normal mode
Receive unit
Receive unit
Transmit unit
Transmitting
Message
Receive unit
(Listen-Only mode)
Receive unit
Receive unit
No ACK or error frame transmit operations are performed
Transmit unit
Getting
Responses
• Normal receive completed: ACK output
• Communication error: Error frame output
For more CAN API information:
• CAN Application Note — Data on API for R8C and M16C MCUs; download from http://documentation.renesas.com/eng/products/mpumcu/apn/rej05b0276_16ccanap.pdf
• CAN Specification Version 2.0, 1991, Robert Bosch GmbH
• M16C/6NK, M16C/1N, M16C/29, R8C/23, etc. hardware manuals
Question
Which of these statements correctly describe error handling, slot status and other issues? Select all that apply and then click Done.
The polling approach to error confirmation uses the bus error state flag, error active status flag, and bus off status flag in the CAN status register.
A slot returns from the bus off state when it receives
11 consecutive recessive bits 128 times or when a
‘Return from bus off’ function executes.
The loopback function is useful as self-diagnostic during debugging because it can confirm transmitted content.
A receive unit in listen-only mode doesn't transmit ACKs or error frames.
Done
Course Summary
• CAN peripheral in R8C and M16C microcontrollers
• Initializing the CAN peripheral
• CAN API functions