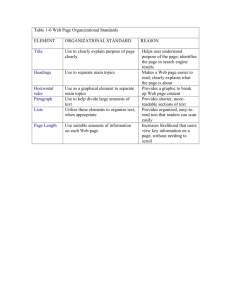
Introduction to Statistical Modeling and Machine Learning
advertisement

Introduction to Statistical Modeling and Machine Learning Lecture 8 Spoken Language Processing Prof. Andrew Rosenberg What is Statistical Modeling • Statistical Modeling is the process of using data to construct a mathematical or algorithmic device to measure the probability of some observation. • Training – Using a set of observations to learn parameters of a model, or construct the decision making process. • Evaluation – Determining the probability of a new observation 1 What is a Statistical Model? • Mathematically, it’s a function that maps observations to probabilities. • Observations can be in – one dimension • one number (numeric), one category (nominal) – or in many dimensions • two numbers: height and weight, • a number and a category: height and gender • Each dimension is called a feature 2 What is Machine Learning? • Automatically identifying patterns in data • Automatically making decisions based on data • Hypothesis: Data Learning Algorithm Behavior ≥ Data Programmer or Expert Behavior 3 Basics of Probabilities. • Probabilities fall in the range [0,1] • Mutually Exclusive events are events that cannot simultaneously occur. – The sum of the likelihoods of all mutually exclusive events must be 1. 4 Joint Probability • We can represent the probability of more than one event at the same time. • If two events are independent. 5 Joint Probability Table • A Joint Probability function defines the likelihood of two (or more) events occurring. Blue box Red box Orange 1 6 7 Green 3 2 5 4 8 12 • Let nij be the number of times event i and event j simultaneously occur. 6 Marginalization • Consider the probability of X irrespective of Y. • The number of instances in column j is the sum of instances in each cell • Therefore, we can marginalize or “sum over” Y: 7 Conditional Probability • Consider only instances where X = xj. • The fraction of these instances where Y = yi is the conditional probability – “The probability of y given x” 8 Relating the Joint Conditional and Marginal 9 Sum and Product Rules • In general, we’ll refer to a distribution over a random variable as p(X) and a distribution evaluated at a particular value as p(x). Sum Rule Product Rule 10 Bayes Rule 11 Interpretation of Bayes Rule Posterior Prior Likelihood • Prior: Information we have before observation. • Posterior: The distribution of Y after observing X • Likelihood: The likelihood of observing X given Y 12 Expected Values • The expected value of a random variable is a weighted average. • Expected values are used to determine what is likely to happen in a random setting • Expectation – The expected value of a function is the hypothesis • Variance – The variance is the confidence in that hypothesis 13 What is a Probability? • Frequentists – A probability is the likelihood that an event will happen – It is approximated by the ratio of the number of observed events to the number of total events – Assessment is vital to selecting a model – Point estimates are absolutely fine 14 What is a Probability? • Bayesians – A probability is a degree of believability of a proposition. – Bayesians require that probabilities be prior beliefs conditioned on data. – The Bayesian approach “is optimal”, given a good model, a good prior and a good loss function. Don’t worry so much about assessment. – If you are ever making a point estimate, you’ve made a mistake. The only valid probabilities are posteriors based on evidence given some prior 15 Boxes and Balls • 2 Boxes, one red and one blue. • Each contain colored balls. 16 Boxes and Balls • Given some information about B and L, we want to ask questions about the likelihood of different events. • What is the probability of selecting an apple? • If I chose an orange ball, what is the probability that I chose from the blue box? 17 Naïve Bayes Classification • This is a simple case of a simple classification approach. • Here the Box is the class, and the colored ball is a feature, or the observation. • We can extend this Bayesian classification approach to incorporate more independent features. 18 Naïve Bayes Classification 19 Naïve Bayes Classification • Assuming independence between the features given the class simplifies the math 20 Argmax • Identify the parameter that maximizes a function. • When training a model, the goal is to maximize the likelihood of the model under some parameters. • Since the log function is monotonic, optimizing a log transform of the likelihood is equivalent. 21 Bernoulli Distribution • Also known as a Binary Distribution. • Represented by a single parameter • Constrained version of the more general, multinomial distribution 0.72 0.28 b 1-b 22 Multinomial Distribution • If a variable, x, can take 1-of-K states, we represent the distribution of this variable as a multinomial distribution. • The probability of x being in state k is μk 0.1 0.1 0.5 0.2 0.1 23 Gaussian Distribution • One Dimension • D-Dimensions 24 Gaussian Distribution 25 Gaussian Distributions • We use Gaussian Distributions all over the place. 26 Gaussian Distributions • We use Gaussian Distributions all over the place. 27 Supervised vs. Unsupervised Learning • In supervised learning, the desired, target, or class value is known. • In unsupervised learning, there is no observations of the target variable. • Major Tasks – Regression • Predict a numerical value from features i.e. “other information” – Classification • Predict a categorical value – Clustering • Identify groups of similar entities 28 Graphical Example of Regression ? 29 Graphical Example of Regression 30 Graphical Example of Regression 31 Graphical Example of Classification 32 Graphical Example of Classification ? 33 Graphical Example of Classification ? 34 Graphical Example of Classification 35 Graphical Example of Classification 36 Graphical Example of Classification 37 Decision Boundaries 38 Graphical Example of Clustering 39 Graphical Example of Clustering 40 Graphical Example of Clustering 41 Counting parameters • The “size” of a statistical model is measured by the number of parameters that need to be trained. • Bernouli distribution – one parameter • Multinomial distribution – N-1 parameters • 1-dimensional Gaussian – 2 parameter: mean and variance • N-dimensional Gaussian – N-dimensional mean vector – N*N dimensional covariance matrix 42 Curse of Dimensionality • Increased number of features increases data needs exponentially. • If 1 feature can be approximated with 10 observations, 2 features require 10*10 • Models should be “small” – few parameters / features – relative to the amount of available data. 43 Overfitting • Models with more parameters are more general. – I.e., Can represent more relationships between variables • More parameters can allow a statistical model to fit training data too well. • Too well: When the model fails to generalize to unseen data. 44 Overfitting 45 Overfitting 46 Overfitting 47 Evaluation of Statistical Models • Model Likelihood. • Calculate p(x; Θ) of new data x based on trained parameters Θ. • The model parameters (almost always) maximize the likelihood of the training data. • Evaluate the likelihood of unseen – evaluation or testing – data. 48 Evaluation of Statistical Models • Evaluating Classifiers • Accuracy is the most common and most intuitive calculation of performance of a classifier. 49 Contingency Table • Reports the confusion between True and Hypothesized classes True Values Hyp Values Positive Negative Positive True Positive False Positive Negative False Negative True Negative 50 Cross Validation • Cross Validation is a technique to estimate the generalization performance of a classifier. • Identify n “folds” of the available data. • Train on n-1 folds • Test on the remaining fold. • In the extreme (n=N) this is known as “leave-one-out” cross validation • n-fold cross validation (xval) gives n samples of the performance of the classifier. 51 Caveats – Black Swans • In the 17th Century, all known swans were white. • Based on evidence, it is impossible for a swan to be anything other than white. • In the 18th Century, black swans were discovered in Western Australia • Black Swans are rare, sometimes unpredictable events, that have extreme impact • Almost all statistical models underestimate the likelihood of unseen events. 52 Caveats – The Long Tail • Many events follow an exponential distribution • These distributions have a very long “tail”. – I.e. A large region with significant probability mass, but low likelihood at any particular point. • Often, interesting events occur in the Long Tail, but it is difficult to accurately model behavior in this region. 53 Next Class • Gaussian Mixture Models • Reading: J&M 9.3 54