Structural Analysis 3 - An
advertisement

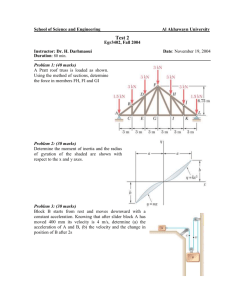
Chapter 16 RIGID BODY MOTION: TRANSLATION & ROTATION (Sections 16.1-16.3) Objectives : To analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. Methodology Understand 1D translational motion Use analogy: To relate rotation with translation To relate general motion of rigid body with relative motion between two particles using vector (tensor) notations. APPLICATIONS Passengers ride are subjected to curvilinear translation. Given the angular motion of the rotating arms, determine v and a experienced by the passengers? Does each passenger feel the same acceleration? How can we relate the angular motions of contacting bodies that rotate about different fixed axes? PLANAR KINEMATICS OF A RIGID BODY There are cases where an object cannot be treated as a particle. In these cases the size or shape of the body must be considered. Also, rotation of the body about its center of mass requires a different approach. For example, in the design of gears and links in machinery or mechanisms, rotation of the body is an important aspect in the analysis of motion. PLANAR RIGID BODY MOTION There are three types of planar rigid body motion. Translation: when every line segment on the body remains parallel to its original direction during motion. When all points move along straight lines: motion is rectilinear, when the paths are curved: motion is curvilinear translation. PLANAR RIGID BODY MOTION (continued) Rotation about a fixed axis: all particles of the body, except those on the axis of rotation, move along circular paths in planes perpendicular to the axis of rotation. General plane motion: the body undergoes both translation and rotation. Translation occurs within a plane and rotation occurs about an axis perpendicular to this plane. PLANAR RIGID BODY MOTION (continued) Example of body undergoing the three types of motion: The wheel and crank (A and B) undergo rotation about a fixed axis. Both axes of rotation are at the location of the pins and perpendicular to the plane of the figure. The piston (C) undergoes rectilinear translation. The connecting rod (D) undergoes curvilinear translation, since it will remain horizontal as it moves along a circular path. The connecting rod (E) undergoes general plane motion, as it will both translate and rotate. RIGID-BODY MOTION: TRANSLATION The positions of two points A and B on a translating body can be related by rB = rA + rB/A The velocity at B is vB = vA+ drB/A/dt . Now drB/A/dt = 0 since rB/A is constant. So, vB = vA, also: aB = aA. Note, all points in a rigid body subjected to translation move with the same velocity and acceleration. RIGID-BODY MOTION: ROTATION ABOUT A FIXED AXIS When a body rotates, point P travels along a circular path. The angular position of P is defined by . d is the angular displacement, with units of either radians or revolutions (1 revol. = 2 radians) Angular velocity, , is the time derivative of angular displacement: = d/dt (rad/s) + Similarly, angular acceleration is = d2/dt2 = d/dt or = (d/d) rad/s2 Time issues: Clockwise versus counterclockwise Design of stairs Time of days, months Hour time?! RIGID-BODY MOTION: ROTATION ABOUT A FIXED AXIS (continued) If is constant (C) by analogy: = O + Ct = O + Ot + 0.5Ct2 2 = (O)2 + 2C ( – O) O and O are initial angular position and angular velocity. RIGID-BODY ROTATION: VELOCITY OF POINT P The velocity of P: v = r, its direction is tangent to the circular path of P. In vector formulation, the magnitude and direction of v can be determined from the cross product of and rp . rp is a vector from any point on the axis of rotation to P. v = x rp = x r The direction of v is determined by the righthand rule. RIGID-BODY ROTATION: ACCELERATION OF POINT P The acceleration of P is expressed in terms of its normal (an) and tangential (at) components. In scalar form, these are at = r and an = 2 r. The tangential component, at, represents the time rate of change in the velocity's magnitude. It is directed tangent to the path of motion. The normal component, an, represents the time rate of change in the velocity’s direction. It is directed toward the center of the circular path. RIGID-BODY ROTATION: ACCELERATION OF POINT P (continued) Using the vector formulation, the acceleration of P is a = dv/dt = d/dt x rP + x drP/dt = x r P + x ( x r P) It can be shown that this equation reduces to a = x r – 2r = at + an The magnitude of the acceleration vector is a = (at)2 + (an)2 EXAMPLE Given:The motor M begins rotating at = 4(1 – e-t) rad/s, where t is in seconds. The radii of the motor, fan pulleys, and fan blades are 2.5cm, 10cm, and 40cm, respectively. Find: The magnitudes of the velocity and acceleration at point P on the fan blade when t = 0.5 s. EXAMPLE (Solution:) 1) The angular velocity is given as a function of time, m = 4(1 – e-t), thus: m = dm/dt = 4e-t rad/s2 When t = 0.5 s, m = 4(1 – e-0.5) = 1.5739 rad/s, m = 4e-0.5 = 2.4261 rad/s2 2) Since the belt does not slip (and is assumed inextensible), it must have the same speed and tangential component of acceleration. Thus the pulleys must have the same speed and tangential acceleration at their contact points with the belt. Therefore, the angular velocities of the motor (m) and fan (f) are related as v = m rm = f rf => (1.5739)(2.5) = f(10) => f = 0.3935 rad/s EXAMPLE (continued) 3) Similarly, the tangential accelerations are related as at = m rm = f rf => (2.4261)(2.5) = f(10) => f = 0.606rad/s2 4) The speed of point P on the fan, at a radius of 40cm, is now determined as vP = frP = (0.3935)(40) = 15.8 cm/s The normal and tangential components of acceleration of P are an = (f)2 rP = (0.3935)2 (40) = 6.2 cm/s2 at = f rP = (0.6065) (40) = 24.3 cm/s2 GROUP PROBLEM SOLVING Given: Starting from rest when s = 0, pulley A (rA = 50 mm) is given a constant angular acceleration, A = 6 rad/s2. Pulley C (rC = 150 mm) has an inner hub D (rD = 75 mm) which is fixed to C and turns with it. Find: The speed of block B when it has risen s = 6 m. GROUP PROBLEM SOLVING (Solution) 1) Assuming the belt is inextensible and does not slip, C = 2 rad/s2 2) Assuming the cord attached to block B is inextensible and does not slip, the speed and acceleration of B is aB = 0.15 m/s2 GROUP PROBLEM SOLVING (continued) 3) Since A is constant, vB = 1.34 m/s ABSOLUTE MOTION ANALYSIS (Section 16.4) Objective: To determine the velocity and acceleration of a rigid body undergoing general plane motion using an absolute motion analysis. Note: to be read by student if interested in geometry. In class we only use vector (tensor) methodology. EXAMPLE 1 Given:Two slider blocks are connected by a rod of length 2 m. Also, vA = 8 m/s and aA = 0. Find: Angular velocity, , and angular acceleration, , of the rod when = 60°. EXAMPLE 1 (Solution by geometry)) In class solution by vectors By geometry, sA = 2 cos reference By differentiating with respect to time, vA = -2 sin A sA Using = 60° and vA = 8 m/s and solving for : = 8/(-2 sin 60°) = - 4.62 rad/s Differentiating vA and solving for , aA = -2 sin – 22 cos = 0 = - 2/tan = -12.32 rad/s2 EXAMPLE 2 (Solution by geometry)) In class solution by vectors Given:Crank AB rotates at a constant = 150 rad/s Find: Velocity of P when = 30° Solution: xP = 60 cos + (225)2 – (60 sin )2 vP = -60 sin + (0.5)[(225)2 – (60sin )2]-0.5(-2)(60sin )(60cos ) vP = -60 sin – [0.5(60)2sin2 ] / (225)2 – (60 sin )2 At = 30°, = 150 rad/s and vP = -5550mm/s GROUP PROBLEM SOLVING How to deal with flexible bodies! Given: The and of the disk of the dimensions shown. Find: The velocity and acceleration of cylinder B in terms of . GROUP PROBLEM SOLVING (Solution) Law of cosines: aB = RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5) Objectives: a) Describe the velocity of a rigid body in terms of translation and rotation components. b) Perform a relative-motion velocity analysis of a point on the body. APPLICATIONS As block A moves to the left with vA, it causes the link CB to rotate counterclockwise, thus vB is directed tangent to its circular path. Which link undergoes general plane motion? How to find its angular velocity? Gear systems are used in many automobile automatic transmissions. By locking or releasing different gears, this system can operate the car at different speeds. RELATIVE MOTION ANALYSIS: DISPLACEMENT A body undergoes a combination of translation and rotation (general motion) = Point A is called the base point, has a known motion. The x’-y’ frame translates with the body, but does not rotate. The displacement of B: Disp. due to translation drB = drA + drB/A Disp. due to translation and rotation Disp. due to rotation RELATIVE MOTION ANALYSIS: VELOCITY = + The velocity at B is : (drB/dt) = (drA/dt) + (drB/A/dt) or vB = vA + vB/A Since the body is taken as rotating about A, vB/A = drB/A/dt = x rB/A Here will only have a k component since the axis of rotation is perpendicular to the plane of translation. RELATIVE MOTION ANALYSIS: VELOCITY (continued) vB = vA + x rB/A When using the relative velocity equation, points A and B should generally be points on the body with a known motion. Often these points are pin connections in linkages. Both points A and B have circular motion since the disk and link BC move in circular paths. The directions of vA and vB are tangent to the circular path of motion. RELATIVE MOTION ANALYSIS: VELOCITY (continued) vB = vA + x rB/A When a wheel rolls without slipping, point A has zero velocity. Furthermore, point B at the center of the wheel moves along a horizontal path. Thus, vB has a known direction, e.g., parallel to the surface. EXAMPLE 1 Given: Block A is moving down at 2 m/s. Find: The velocity of B at the instant = 45. EXAMPLE 1 (Solution) vB = vA + AB x rB/A vB i = -2 j + ( k x (0.2 sin 45 i - 0.2 cos 45 j )) vB i = -2 j + 0.2 sin 45 j + 0.2 cos 45 i Equating the i and j components gives: vB = 0.2 cos 45 0 = -2 + 0.2 sin 45 Solving: = 14.1 rad/s or AB = 14.1 rad/s k vB = 2 m/s or vB = 2 m/s i EXAMPLE 2 Given:Collar C is moving downward with a velocity of 2 m/s. Find: The angular velocities of CB and AB at this instant. EXAMPLE 2 (solution) Link CB. Write the relative-velocity equation: vB = vC + CB x rB/C vB i = -2 j + CB k x (0.2 i - 0.2 j ) vB i = -2 j + 0.2 CB j + 0.2 CB i By comparing the i, j components: i: vB = 0.2 CB => vB = 2 m/s i j: 0 = -2 + 0.2 CB => CB = 10 rad/s k EXAMPLE 2 (continued) Link AB experiences only rotation about A. Since vB is known, there is only one equation with one unknown to be found. vB = AB x rB/A 2 i = AB k x (-0.2 j ) 2 i = 0.2 AB i By comparing the i-components: 2 = 0.2 AB So, AB = 10 rad/s k GROUP PROBLEM SOLVING Given: The crankshaft AB is rotating at 500 rad/s about a fixed axis passing through A. Find: The speed of the piston P at the instant it is in the position shown. GROUP PROBLEM SOLVING (solution) 1) First draw the kinematic diagram of link AB. Applying the relative velocity equation vB = -50 j m/s GROUP PROBLEM SOLVING (continued) 2) Now consider link BC. Applying the relative velocity equation: vC = -50 j m/s INSTANTANEOUS CENTER (IC) OF ZERO VELOCITY (Section 16.6) To be read by student if interested in geometry. Note: every body has an instantaneous center of zero velocity. Think of motion of planets and an instantaneous center for the universe RELATIVE MOTION ANALYSIS: ACCELERATION (Section 16.7) Objectives: a) Resolve the acceleration of a point on a body into components of translation and rotation. b) Determine the acceleration of a point on a body by using a relative acceleration analysis. APPLICATIONS The forces delivered to the crankshaft, and the angular acceleration of the crankshaft, depend on the speed and acceleration of the piston in an automotive engine. How can we relate the accelerations of the piston, connection rod, and crankshaft in this engine? RELATIVE MOTION ANALYSIS: ACCELERATION The equation relating the accelerations of two points on the body is determined by: dvB dvA dv = + B/ A dt dt dt These are absolute accelerations of points A and B. They are measured from a set of fixed x,y axes. This term is the acceleration of B wrt A. It will develop tangential and normal components. The result is aB = aA + (aB/A)t + (aB/A)n RELATIVE MOTION ANALYSIS: ACCELERATION Graphically: aB = aA + = (aB/A)t + (aB/A)n + The relative tangential acceleration component (aB/A)t is ( x rB/A) and perpendicular to rB/A. The relative normal acceleration component (aB/A)n is (-2 rB/A) and the direction is always from B towards A. RELATIVE MOTION ANALYSIS: ACCELERATION (continued) Since the relative acceleration components can be expressed as (aB/A)t = rB/A and (aB/A)n = - 2 rB/A the relative acceleration equation becomes aB = aA + rB/A - 2 rB/A APPLICATION OF RELATIVE ACCELERATION EQUATION In applying the relative acceleration equation, the two points used in the analysis (A and B) should generally be selected as points which have a known motion, such as pin connections with other bodies. In this mechanism, point B is known to travel along a circular path, so aB can be expressed in terms of its normal and tangential components. Note that point B on link BC will have the same acceleration as point B on link AB. Point C, connecting link BC and the piston, moves along a straight-line path. Hence, aC is directed horizontally. EXAMPLE 1 Given:Point A on rod AB has an acceleration of 3 m/s2 and a velocity of 2 m/s at the instant the rod becomes horizontal. Find: The angular acceleration of the rod at this instant. Solution: First, we need to find the angular velocity of the rod at this instant. Locating the instant center (IC) for rod AB (which lies above the midpoint of the rod), we can determine : A = vA/rA/IC = vA/(5/cos 45) = 0.283 rad/s EXAMPLE 1 (continued) Since points A and B both move along straight-line paths, aA = 3 (cos 45 i - sin 45 j) m/s2 aB = aB(cos 45 i + sin 45 j) m/s2 Applying the relative acceleration equation aB = aA + x rB/A – 2rB/A (aB cos 45 i + aB sin 45 j) = (3 cos 45 i – 3 sin 45 j) + ( k x 10 i) – (0.283)2(10i) EXAMPLE 1 (continued) By comparing the i, j components; aB cos 45 = 3 cos 45 – (0.283)2((10) aB sin 45 = -3 sin 45 + (10) Solving: aB = 1.87 m/s2 = 0.344 rad/s2 BODIES IN CONTACT Consider two bodies in contact with one another without slipping, where the points in contact move along different paths. In this case, the tangential components of acceleration will be the same, i. e., (aA)t = (aA’)t (which implies BrB = CrC ). The normal components of acceleration will not be the same. (aA)n (aA’)n so aA aA’ EXAMPLE: ROLLING MOTION A common problem involves rolling motion without slip; e.g., a ball or disk rolling along a flat surface without slipping. This problem can be analyzed using relative velocity and acceleration equations. As the cylinder rolls, point G (center) moves along a straight line, while point A, on the rim of the cylinder, moves along a curved path called a cycloid. If and are known, the relative velocity and acceleration equations can be applied to these points at the instant A is in contact with the ground: EXAMPLE: ROLLING MOTION(continued) • Velocity analysis. Since no slip occurs, v = 0. From the A kinematic diagram: vG = vA + x rG/A vG i = 0 + (- k) x (r j) vG = r or vG = r i • Acceleration. Since G moves along a straight-line path, aG is horizontal. Just before A touches ground, its velocity is directed downward, and just after contact, its velocity is directed upward. Thus, point A accelerates upward as it leaves the ground. aG = aA + x rG/A – 2rG/A => aG i = aA j + (- k) x (r j) – 2(r j) Evaluating and equating i and j components: aG = r and aA = 2r or aG = r i and aA = 2r j ROLLING MOTION(continued): different view vG = v i and v=2πr/Δt ω=2π/Δt=2π/(2πr/v)=v/r vG =r ω i vA = vG + vA/G =r ω i – ωkX-r j=0 EXAMPLE 2 Given:The ball rolls without slipping. Find: The accelerations of points A and B at this instant. Solution: Since the ball is rolling without slip, aO is directed to the left with a magnitude of aO = r = (4 rad/s2)(0.15 m)=0.6 m/s2 EXAMPLE 2 (continued) Apply the relative acceleration equation between points O and B: aB = aO + x rB/O – 2rB/O aB = -0.6i + (4k) x (0.15i) – (6)2(0.15i)= (-6i + 0.6j) m/s2 Now do the same for point A. aA = aO + x rA/O – 2rA/O aA = -0.6i + (4k) x (0.15j) – (6)2(0.15j)= (-1.2i – 5.4j) m/s2 GROUP PROBLEM SOLVING Given: The disk is rotating with = 3 rad/s, = 8 rad/s2 at this instant. Find: The acceleration at point B, and the angular velocity and acceleration of link AB. Solution: ….. GROUP PROBLEM SOLVING (continued) Draw the kinematic diagram and then apply the relative-acceleration equation: aBi = (1.6 + 0.4 sin 30 AB)i + (-1.8 + 0.4 cos 30 AB)j GROUP PROBLEM SOLVING (continued) Solving: aB = 2.64 m/s2 AB = 5.20 rad/s2 CHAPTER 17 MASS MOMENT OF INERTIA (Section 17.1) Objectives: To determine the mass moment of inertia of a rigid body or a system of rigid bodies. APPLICATIONS The flywheel on the engine has a large mass moment of inertia about its axis of rotation. Once it is set into motion, it will be difficult to stop. Does the mass moment of inertia depend on the radius of the wheel? Its thickness? The crank undergoes rotation about a fixed axis that is not at its mass center. The crank develops a kinetic energy directly related to its mass moment of inertia. As the crank rotates, its kinetic energy is converted to potential energy and vice versa. MOMENT OF INERTIA The mass moment of inertia is a measure of an object’s resistance to rotation: I = r2 dm = r2r dV r acts as the moment arm of the mass element and r is the density of the body. Thus, the value m axis about of I differs for each which it is V computed. In Section 17.1, the focus is on obtaining the mass moment of inertia via integration. MOMENT OF INERTIA (continued) The figures show the mass moment of inertia for two flat plate shapes commonly used when working with 3D bodies. The shapes are often used as the differential element being integrated over the entire body. PROCEDURE FOR ANALYSIS (review of statics/ not required) Shell element • If a shell element having a height z, radius r = y, and thickness dy is chosen for integration, then the volume element is dV = (2πy)(z)dy Disk element If a disk element having a radius y and a thickness dz is chosen for integration, then the volume element is dV = (πy2)dz PARALLEL-AXIS THEOREM The parallel axis theorem states: IA= IG + md2 where IG = mass moment of inertia about the body’s mass center m = mass of the body d = perpendicular distance between the parallel axes PARALLEL-AXIS THEOREM (continued) Radius of Gyration: has units of length and is a measure of the distribution of the body’s mass about the axis at which the moment of inertia is defined. I = m k2 or k = (I/m) Composite Bodies: If a body is constructed of a number of shapes, the mass moment of inertia of the body about any axis is the algebraic addition of all the mass moments of inertia, found about the same axis, of the different shapes. EXAMPLE 2 Given:Two rods assembled as shown, with each rod weighing 10 N. Find: The location of the center of mass G and moment of inertia about an axis passing through G of the rod assembly. Solution: The center of mass is located relative to the pin at O at a distance y, where EXAMPLE 2 (continued) The mass moment of inertia of each rod about its center of mass is: I = (1/12)ml2 = (1/12)(10/9.80)(2)2 = 0.340 kg·m2 The moment of inertia IG is calculated using the parallel axis theorem. IG = [I + m(y-1)2]OA + [I + m(2- )2]BC IG=[0.34+(10/9.8)(0.5)2]+[0.34+(10/9.80)(0.5)2] = 1.19 kg·m2 PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION (Sections 17.2-17.3) Objectives: a) Apply the three equations of motion for a rigid body in planar motion. b) Analyze problems involving translational motion. APPLICATIONS The boat and trailer undergo rectilinear motion. In order to find the reactions at the trailer wheels and the acceleration of the boat center of mass, we need to draw the FBD for the boat and trailer. = How many equations of motion do we need to solve this problem? What are they? EQUATIONS OF TRANSLATIONAL MOTION • We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. • As discussed when a body is subjected to general plane motion, it undergoes a combination of translation and rotation. • First, a coordinate system with its origin at an arbitrary point P is established. The x-y axes should not rotate and can either be fixed or translate with constant velocity. EQUATIONS OF TRANSLATIONAL MOTION (continued) • If a body undergoes translational motion, the equation of motion is F = m aG . In scalar form: Fx = m(aG)x and Fy = m(aG)y • In words: the sum of all the external forces acting on the body is equal to the body’s mass times the acceleration of it’s mass center. = EQUATIONS OF ROTATIONAL MOTION We need to determine the effects caused by the moments of the external force system. The moment about point P is: (ri Fi) + Mi = rG maG + IG Mp = ( Mk )p where Mp is the resultant moment about P due to all the external forces. The term (Mk)p is called the kinetic moment about P. = EQUATIONS OF ROTATIONAL MOTION (continued) If point P coincides with the mass center G, this equation reduces to MG = IG . Thus, three independent scalar equations of motion are used to describe the general planar motion of a rigid body: Fx = m(aG)x Fy = m(aG)y and MG = IG or Mp = (Mk)p EQUATIONS OF MOTION: TRANSLATION ONLY All the particles of the body have the same acceleration so aG = a and = 0. The equations of motion become: Fx = m(aG)x Fy = m(aG)y MG = 0 Note that the moment equation can be applied about other points instead of the mass center, e.g. MA = (m aG ) d . EQUATIONS OF MOTION: TRANSLATION ONLY (continued) When a rigid body is subjected to curvilinear translation, it is best to use an n-t coordinate system. Then apply the equations of motion, as written below, for n-t coordinates. Fn = m(aG)n Ft = m(aG)t MG = 0 or MB = e[m(aG)t] – h[m(aG)n] EXAMPLE Given: A 50 kg crate rests on a horizontal surface for which the kinetic friction coefficient k = 0.2. Find: The acceleration of the crate if P = 600 N. Note that the load P can cause the crate either to slide or to tip over. Let’s assume that the crate slides. We will check this assumption later. EXAMPLE (solution) The coordinate system and FBD are as shown. The weight of (50)(9.81) N is applied at the center of mass and the normal force Nc acts at O. Point O is some distance x from the crate’s center line. The unknowns are Nc, x, and aG . Applying the equations of motion: Fy = m(aG)y: Nc – 490.5 = 0, Nc = 490.5 N Fx = m(aG)x: 600 – 0.2 Nc = 50 aG, aG = 10.0 m/s2 MG = 0: -600(0.3) + Nc(x)-0.2 Nc (0.5) = 0,x = 0.467 m EXAMPLE (continued) Since x = 0.467 m < 0.5 m, the crate slides as originally assumed. If x was greater than 0.5 m, the problem would have to be reworked with the assumption that tipping occurred. Example 2 Given: A 2kg bottle rests on the checkout conveyor at a grocery store. The static friction coefficient is s = 0.2. Find: The largest acceleration the conveyor can have without causing the bottle to slip or tip Answer: 1.96m/s2 no slip 1.84m/s2 no tip GROUP PROBLEM SOLVING Given: A uniform rod BC has a mass of 3 kg. The crank is rotating at a constant AB = 5 rad/s. Find: The vertical forces on rod BC at points B and C when = 0 and 90 degrees. GROUP PROBLEM SOLVING (continued) Solution: Rod BC’s FBD at = 0º: Applying the equations of motion: By = 7.215 N Cy = 7.215 N GROUP PROBLEM SOLVING (continued) When = 90º, the FBD is: Applying the equations of motion: By = 14.7 N Cy = 14.7 N EQUATIONS OF MOTION: ROTATION ABOUT A FIXED AXIS (Section 17.4) Objectives: To analyze the planar kinetics of a rigid body undergoing rotational motion. APPLICATIONS The crank undergoes rotation about a fixed axis, caused by the driving torque M from a motor. Pin at the center of rotation. As the crank turns, a dynamic reaction is produced at the pin. It is a function of angular velocity, angular acceleration, and the orientation of the crank. EQUATIONS OF MOTION FOR PURE ROTATION When a rigid body rotates, the body’s center of gravity G moves in a circular path of radius rG. Thus, the acceleration of G can be represented by (aG)t = rG and (aG)n = rG 2. The body experiences an angular acceleration, its inertia creates a moment IG equal to the moment of the external forces about G. Thus Fn = m (aG)n = m rG 2 , Ft = m (aG)t = m rG MG = IG EQUATIONS OF MOTION (continued) MG moment equation may be replaced by a moment summation about any arbitrary point. Summing the moment about the center of rotation O yields MO = IG + rG m (aG) t = (IG + m (rG)2 ) Since, IO = IG + m(rG)2, therefore the three equations of motion for the body becomes: Fn = m (aG) n = m rG 2 Ft = m (aG) t = m rG MO = IO EXAMPLE Given:A rod with mass of 20 kg is rotating at 5rad/s at the instant shown. A moment of 60 N·m is applied to the rod. Find: The angular acceleration and the reaction at pin O when the rod is in the horizontal position. EXAMPLE (continued) FBD & Kinetic Diagram Equations of motion: + Fn = man = mrG2 On = 20(1.5)(5)2 = 750 N + Ft = mat = mrG -Ot + 20(9.81) = 20(1.5) + MO = IG + m rG (rG) EXAMPLE (continued) Using IG = (ml2)/12 and rG = (0.5)(l): MO = [(ml2/12) + (ml2/4)] = (ml2/3) where (ml2/3) = IO. After substituting: 60 + 20(9.81)(1.5) = 20(32/3) Solving: = 5.9 rad/s2 Ot = 19 N GROUP PROBLEM SOLVING Given: Wdisk = 15 N, Wrod = 10 N, ω = 8 rad/s at this instant. Find: The horizontal and vertical components of the reaction at pin O when the rod is horizontal. GROUP PROBLEM SOLVING (continued) Solution: FBD & Kinetic Diagrams Equations of motion: Fx = m(aG)x: Fy = m(aG)y: MO = Ioα: Therefore, α = 2.85rad/s2, Oy = 4.29 N Ox = 465N EQUATIONS OF MOTION: GENERAL PLANE MOTION (Section 17.5) Objectives: To analyze the planar kinetics of a rigid body undergoing general plane motion. APPLICATIONS As the soil compactor accelerates forward, the front roller experiences general plane motion (both translation and rotation). What are the loads experienced by the roller shaft or bearings? = The forces shown on the roller’s FBD cause the accelerations shown on the kinetic diagram. APPLICATIONS (continued) During an impact, the center of gravity of this crash dummy will decelerate with the vehicle, but also experience another acceleration due to its rotation about point A. How can engineers use this information to determine the forces exerted by the seat belt on a passenger during a crash? EQUATIONS OF MOTION: GENERAL PLANE MOTION When a rigid body is subjected to external forces and couple-moments, it undergoes both translational and rotational motion. Using an x-y inertial coordinate system, the equations of motions about the center of mass, G, may be written as Fx = m (aG)x P Fy = m (aG)y MG = I G EQUATIONS OF MOTION: GENERAL PLANE MOTION (continued) Sometimes, it is convenient to write the moment equation about some point P other than G. Then the equations of motion are: Fx = m (aG)x Fy = m (aG)y MP = (Mk )P P Here, (Mk )P is the sum of the moments of IG α and maG about point P. FRICTIONAL ROLLING PROBLEMS When analyzing the rolling motion it may not be known if the body rolls without slipping or if it slides as it rolls. For example, consider a disk with mass m and radius r, subjected to a known force P. The equations of motion will be Fx = m(aG)x => P - F = maG Fy = m(aG)y => N - mg = 0 MG = IGα => F r = IG α There are 4 unknowns (F, N, α, and aG) in these three equations. FRICTIONAL ROLLING PROBLEMS (continued) Hence, we need an assumption to provide another equation. The 4th equation can be obtained from the slip or non-slip condition of the disk. Case 1: Assume no slipping and use aG = r and DO NOT use Ff = sN. After solving, you need to verify the assumption was correct by checking Ff sN. Case 2: Assume slipping and use Ff = kN. In this case, aG r. EXAMPLE Given: A spool has a mass of 8 kg and a radius of gyration (kG) of 0.35 m. Cords of negligible mass are wrapped around its inner hub and outer rim. There is no slipping. Find: The angular acceleration () of the spool. EXAMPLE (solution) FBD The moment of inertia of the spool is IG = m (kG)2 = 8 (0.35)2 = 0.980 kg·m 2 Method I Equations of motion: Fy = m (aG)y T + 100 -78.48 = 8 aG MG = IG 100 (0.2) – T(0.5) = 0.98 3 unknowns, T, aG, . No slipping, the 3rd equation: aG = r=0.5 Solving, we find: =10.3 rad/s2, aG = 5.16 m/s2, T = 19.8 N EXAMPLE (continued) FBD Method II A moment equation about A will be used. This will eliminate the unknown cord tension (T). MA= (Mk)A: 100 (0.7) - 78.48(0.5) = 0.98 + (8 aG)(0.5) No slip: aG = 0.5α, solving: α = 10.3 rad/s2, aG = 5.16 m/s2 GROUP PROBLEM SOLVING Given:A 50 N wheel has a radius of gyration kG = 0.7 m. Find: The acceleration of the mass center if M = 35 N.m is applied. s = 0.3, k = 0.25. Solution: The moment of inertia of the wheel GROUP PROBLEM SOLVING (continued) FBD: Equations of motion: Do you need another equation before solving for the unknowns? GROUP PROBLEM SOLVING (continued) Solving for the unknowns yields: NA = 50.0 N FA = 0.25 NA = 12.5 N = 7.75 rad/s2 aG = 2.45 m/s2