PPT
advertisement

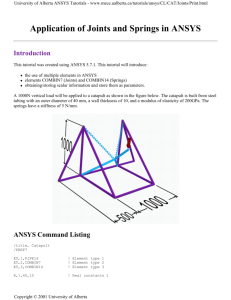
Analysis of Contact Lifting Devices for
Cylindrical Members Using
Adaptive Mesh Refinement in Two Dimensions
Judy Kim – Mechanical Engineering Undergraduate
’14
Maegan Porpora – Mechanical Engineering
Undergraduate ‘14
Adaptive Refinement
Original Mesh
h-Adaptivity
p-Adaptivity
Original elements are
divided to create more
elements
Original elements are
interpolated between with
higher order shape functions
hp-Adaptivity
Real Life Application: Lifting
Devices
Cylindrical parts in the jet engine industry
Lifting Force
Simplified model of a low
pressure turbine interfaced
with a lifting device
Our Design Loads
𝑤𝑒𝑖𝑔ℎ𝑡
2
𝑤𝑒𝑖𝑔ℎ𝑡
2
F
3D Representation with a singularity for the
lifting attachment
Simplified 2D approximation
with a distributed load for
the lifting attachment and
point forces at the ends to
represent contact force
Purpose
• Compare h and p adaptivity
• Which one requires fewer refinements to meet a
target error?
• Which one is easier to implement?
• Is analysis easier in MATLAB or ANSYS?
• Are the results consistent between the two
softwares?
Outline
• Error Estimators
• MATLAB
• ANSYS
• 3 New Geometries
• Conclusions
• Future Recommendations
Initial Problem Setup
Weak form for 2D linear elasticity
𝑛𝑒𝑙
𝑤𝑇
𝐿𝑒
𝑇
𝑇
Ω𝑒
𝑒=1
𝑇
𝐵 𝑒 𝐷𝑒 𝐵𝑒 𝑑Ω𝐿𝑒 𝑑 −
𝑇
𝑁 𝑒 𝑡𝑑Γ −
Γ𝑒
𝑁 𝑒 𝑏𝑑Ω
Ω𝑒
= 0 ∀ 𝑤𝐹 ∈ 𝑈0
There are no body forces in our problem, so this reduces to:
𝑛𝑒𝑙
𝑤𝑇
𝐿𝑒
𝑇
𝑒=1
𝐾𝑒 =
𝑇
𝑁 𝑒 𝑡𝑑Γ
Ω𝑒
Γ𝑒
𝑇
𝑓𝑒 =
𝐵 𝑒 𝐷𝑒 𝐵𝑒 𝑑Ω
Ω𝑒
𝑇
𝐵 𝑒 𝐷𝑒 𝐵𝑒 𝑑Ω𝐿𝑒 𝑑 −
= 0 ∀ 𝑤𝐹 ∈ 𝑈0
𝑇
𝑁 𝑒 𝑡𝑑Γ
Γ𝑒
Summary of A Posteriori Error
Estimation
“From what comes later”
Construct error
estimators from local
info to judge accuracy
of solution
Types of a posteriori
error estimators:
• Explicit
• Implicit
• Recovery-Based
Zienkiewicz-Zhu Patch Recovery
Technique
1/2
1
1D Example
𝐺 − 𝛻𝑔ℎ 2 𝑑Ω
𝜖𝑘 = 𝐺 − 𝛻𝑔ℎ =
0
𝛻𝑔ℎ = 𝐵𝑒 {𝑑 𝑒 }
𝐺 = 𝑁𝑒 𝐺𝑒
Discontinu
ous
𝜖𝑘 = 𝑒𝑟𝑟𝑜𝑟 𝑜𝑓 𝑒𝑙𝑒𝑚𝑒𝑛𝑡 𝐾
𝛻𝑔ℎ = 𝑔𝑟𝑎𝑑𝑖𝑒𝑛𝑡 𝑜𝑓 𝐹𝐸 𝑠𝑜𝑙𝑢𝑡𝑖𝑜𝑛
𝐺 = 𝑟𝑒𝑐𝑜𝑣𝑒𝑟𝑒𝑑 𝑔𝑟𝑎𝑑𝑖𝑒𝑛𝑡 𝑜𝑓 𝐹𝐸 𝑠𝑜𝑙𝑢𝑡𝑖𝑜𝑛
Piecewise
Continuous
[1]
Zienkiewicz-Zhu Error Estimator
Algorithm
𝜂
Calculate FE solution
Calculate recovered
gradient G
For each element
For all 4 Gauss Points
Calculate N
Calculate B
Calculate J and |J|
Interpolate G to Gauss
Point
Interpolate 𝛻g to
Gauss Point
Calculate error by
adding weighted result
at each Gauss Point, take
square root
(−
1 1
, )
3 3
(
1 1
, )
3 3
𝜉
(−
1
1
,
−
)
3
3
𝑁1𝑒
𝑁=
0
𝐵=
𝜕𝑁1𝑒
𝜕𝑥
0
0 𝑁2𝑒
𝑁1𝑒 0
0
𝜕𝑁1𝑒
𝜕𝑦
𝜕𝑁2𝑒
𝜕𝑥
0
(
1
1
,
−
)
3
3
0 𝑁3𝑒
𝑁2𝑒 0
0
𝜕𝑁2𝑒
𝜕𝑦
𝜕𝑁3𝑒
𝜕𝑥
0
0 𝑁4𝑒
𝑁3𝑒 0
0
𝜕𝑁3𝑒
𝜕𝑦
0
𝑁4𝑒
𝜕𝑁4𝑒
𝜕𝑥
0
0
𝜕𝑁4𝑒
𝜕𝑦
Zienkiewicz-Zhu Error Estimator
Algorithm
Calculate FE solution
Calculate recovered gradient
G
For each element
For all 4 Gauss Points
Calculate N
Calculate B
Calculate J and |J|
Interpolate G to Gauss
Point
Interpolate 𝛻g to Gauss
Point
Calculate error by adding
weighted result at each
Gauss Point, take square
root
Sum up local error
If total error < 𝛾 𝑢ℎ
For each element
Mark for refinement
𝜖𝑘 = 𝑙𝑜𝑐𝑎𝑙 𝑒𝑟𝑟𝑜𝑟
Σ𝜖𝑘2 = 𝑡𝑜𝑡𝑎𝑙 𝑒𝑟𝑟𝑜𝑟
𝑢ℎ = 𝑔𝑙𝑜𝑏𝑎𝑙 𝑒𝑛𝑒𝑟𝑔𝑦 𝑛𝑜𝑟𝑚 =
𝑑 𝑇 𝐾𝑑
𝛾 = 𝑒𝑟𝑟𝑜𝑟 𝑡𝑜𝑙𝑒𝑟𝑎𝑛𝑐𝑒 (0 < 𝛾 < 1)
𝑛𝑒𝑙 = 𝑛𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑒𝑙𝑒𝑚𝑒𝑛𝑡𝑠
MATLAB Analysis with hAdaptivity
𝛾 = 10%
Iterati
on:
1
2
3
MATLAB Analysis with pAdaptivity
1st
Order
2nd
Order
3rd
Order
ANSYS h-Adaptivity
4 Noded Quadrilateral
Elements were used
Mesh size began at a scale
of 10
The lifting device boundaries were
divided as shown
ANSYS p-Adaptivity
Plane182 – 4 Noded
Quadrilateral
Plane183 – 8 Noded
Quadrilateral
Note: Plane145 or “p-method” were discontinued with ANSYS 13.0 but used to allow the user to implement shape
functions up to polynomial order eight
Verifying Results with ANSYS
andOriginal
MATLAB
Setup
Refined Mesh (2nd order shape
functions)
• Zero displacement on side 5
• Loads of -111N in the Y direction on the
highlighted nodes
• MATLAB uses 9 nodes per element
• ANSYS uses 8 nodes per element
Program
Max xdisplace
Max ydisplace
Program
Max xdisplace
Max ydisplace
MATLAB
-4.3265e-8
-1.1511e-8
MATLAB
-3.72e-8
-1.32e-8
ANSYS
-4.0e-8
-1.06e-8
ANSYS
-4.48e-8
-1.23e-8
Error
8%
9%
Error
7%
17%
Deformation Plots
ANSYS
MATLAB
Shared Errors
ANSYS
MATLAB
Additional Geometries
• Shaped to mirror the deformation
curve
• Minimizes material
Max Deformation
7.702e-7
Max Stress
0.570 MPa
Max Error at last
refinement
1.628e-7
Total Iterations
6
Additional Geometries
• Truss shaped geometry
• Minimizes material while utilizing
the strength of a truss shaped
structure
Max Deformation
1.409e-7
Max Stress
0.3613 MPa
Max Error at last
refinement
5.614e-8
Total Iterations
6
Additional Geometries
• Rectangular geometry with holes
through the thickness
• Minimizes material
Max Deformation
7.501e-8 m
Max Stress
0.105 MPa
Max Error at last refinement
Total Iterations
5.589e-8
2
Conclusions
• ANSYS analysis is much easier to implement than
creating a code through MATLAB
• Consistent results can be achieved through
both softwares
• Depending on the geometry, the mesh will
converge at different rates under the same
loading conditions
• All geometries analyzed provide an adequate
factor of safety
Recommendations for Future
Analysis
• Automated MATLAB refinement
• Bringing back p-method ANSYS elements
• Ability to choose element type for individual
elements in ANSYS
References
[1] Ainsworth, Mark, and J. Tinsley Oden. A Posteriori Error
Estimation in Finite Element Analysis. New York: Wiley, 2000. Print.
[2] Babuška, Ivo. Accuracy Estimates and Adaptive Refinements in
Finite Element Computations. Chichester: Wiley, 1986. Print.
[3] Flaherty, Joseph E. "Adaptive Finite Element Techniques." Course
Notes - Finite Element Analysis. RPI, n.d. Web. 15 Mar. 2014.
<http://www.cs.rpi.edu/~flaherje/feaframe.html>.
[4] Kyamakya, Kyandoghere, Wolfgang A. Halang, Wolfgang
Mathis, Jean C. Chedjou, and Zhong Li. Selected Topics in
Nonlinear Dynamics and Theoretical Electrical Engineering.
Heidelberg: Springer, 2013. Print.
[5] Morin, Pedro, Ricardo H. Nochetto, and Kunibert G. Siebert.
"Convergence of Adaptive Finite Element Methods." JSTOR. Society
for Industrial and Applied Mathematics, Dec. 2002.