Errors, Random Errors, and Statistical Data in Chemical Analyses
advertisement

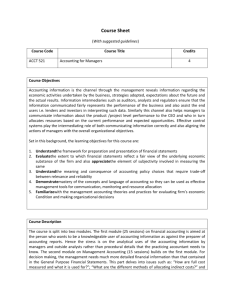
Introduction to Analytical Chemistry CHAPTER 3 ERRORS, RANDOM ERRORS, AND STATISTICAL DATA IN CHEMICAL ANALYSES Errors, Random Errors, and Statistical Data in Chemical Analyses Impossible: The analytical results are free of errors or uncertainties. Possible: Minimize these errors and estimate their size with acceptable accuracy. Statistical calculations for use to judge the quality of experimental measurements are many. 3-2 Copyright © 2011 Cengage Learning Errors, Random Errors, and Statistical Data in Chemical Analyses Only two will be considered: The confidence interval and the least-squares method for constructing calibration curves. 3-3 Copyright © 2011 Cengage Learning Figure 3-1 3-4 Figure 3-1 Results from six replicate determinations for iron in aqueous samples of a standard solution containing 20.00 ppm of iron(III). Copyright © 2011 Cengage Learning Errors, Random Errors, and Statistical Data in Chemical Analyses Measurements are always accompanied by uncertainty. The true value always falls within a range due to uncertainty. The probable magnitude of the error defines the limit within which the true value lies. Data of unknown quality are worthless. The true value of a measurement is never known exactly. 3-5 Copyright © 2011 Cengage Learning Reliability Can Be Assessed In Several Ways Standards of known composition can be analyzed and the results compared with the known composition. Calibrating equipment enhances the quality of data. 3-6 Copyright © 2011 Cengage Learning Reliability Can Be Assessed In Several Ways Questions to answer before beginning an analysis: What is the maximum error that I can tolerate in the result? No one can afford to waste time generating data that are more reliable than is needed. 3-7 Copyright © 2011 Cengage Learning 3A-1 The Mean and Median Mean, arithmetic mean, and average ( x ) are synonyms. (3-1) x i where xi represents the individual values of x making up a set of N replicate measurements. The symbol xi means to add all the values xi for the replicates. 3-8 Copyright © 2011 Cengage Learning 3A-1 The Mean and Median The median is the middle result when replicate data are arranged in order of size. Equal numbers of results are larger and smaller than the median. For an odd number of data points, the median can be evaluated directly. For an even number, the mean of the middle pair is used. 3-9 Copyright © 2011 Cengage Learning 3A-1 The Mean and Median The mean of two or more measurements is their average value. The median is used advantageously when a set of data contains an outlier, a result that differs significantly from others in the set. 3-10 Copyright © 2011 Cengage Learning Example 3-1 Calculate the mean and the median for the data shown in Figure 3-1. Because the set contains an even number of measurements, the median is the average of the central pair: 3-11 Copyright © 2011 Cengage Learning 3A-2 What Is Precision? Precision describes the reproducibility of measurements; the closeness of results to each other. Precision is determined by repeating the measurement on replicate samples. Three terms to describe the precision of a set of replicate data: standard deviation, variance, and coefficient of variation. 3-12 Copyright © 2011 Cengage Learning 3A-2 What Is Precision? Precision is a function of the deviation from the mean di, or just the deviation, which is defined as (3-2) Precision is the closeness of results to others that have been obtained in exactly the same way. 3-13 Copyright © 2011 Cengage Learning 3A-3 How About Accuracy? Accuracy indicates the closeness of the measurement to its true or accepted value and is expressed by the error. Accuracy measures agreement between a result and its true value. Precision describes the agreement among several results that have been obtained in the same way. 3-14 Copyright © 2011 Cengage Learning Figure 3-2 3-15 Figure 3-2 Illustration of accuracy and precision using the pattern of darts on a dartboard Copyright © 2011 Cengage Learning 3A-3 How About Accuracy? Absolute Error The absolute error E in the measurement of a quantity xi is given by the equation (3-3) where xt is the true, or accepted, value of the quantity. Note that we retain the sign in stating the error. 3-16 Copyright © 2011 Cengage Learning 3A-3 How About Accuracy? Relative error Often, the relative error Er is a more useful quantity than the absolute error. The percent relative error is given by the expression (3-4) 3-17 Copyright © 2011 Cengage Learning 3A-3 How About Accuracy? Relative error Relative error is also expressed in parts per thousand (ppt). e.g. 3-18 Copyright © 2011 Cengage Learning 3A-4 Classifying Experimental Errors To determine accuracy, we have to know the true value, and this value is exactly what we are seeking in the analysis. Do we know the answer precisely, also know it accurately? The danger is illustrated in Figure 3-3, which summarizes the results for the determination of nitrogen in two pure compounds: benzyl isothiourea hydrochloride and nicotinic acid. 3-19 Copyright © 2011 Cengage Learning Figure 3-3 Figure 3-3 Absolute error in the micro-Kjeldahl determination of nitrogen. Each dot represents the error associated with a single determination. Each vertical line labeled (xi - xt ) is the absolute average deviation of the set from the true value. (Data from C. O. Willits and C. L. Ogg, J. Assoc. Anal. Chem., 1949, 32, 561. With permission.) 3-20 Copyright © 2011 Cengage Learning 3A-4 Classifying Experimental Errors Figures 3-1 and 3-3 suggest that chemical analyses are affected by at least two types of errors. One type, called random (or indeterminate) error, causes data to be scattered more or less symmetrically around a mean value. Refer to Figure 3-3: Notice that the scatter in the data, and thus the random error, for analysts 1 and 3 is significantly less than that for analysts 2 and 4. 3-21 Copyright © 2011 Cengage Learning 3A-4 Classifying Experimental Errors A second type of error, called systematic (or determinate) error, causes the mean of a set of data to differ from the accepted value. The results of analysts 1 and 2 in Figure 3-3 have little systematic error, but the data of analysts 3 and 4 show systematic errors of about –0.7 and –1.2% nitrogen. 3-22 Copyright © 2011 Cengage Learning 3A-4 Classifying Experimental Errors Random, or indeterminate, errors are errors that affect the precision of measurement. Systematic, or determinate, errors affect the accuracy of results. 3-23 Copyright © 2011 Cengage Learning 3A-4 Classifying Experimental Errors A third type of error is gross error. Gross errors differ from indeterminate and determinate errors. They usually occur only occasionally, are often large, and may cause a result to be either high or low. Gross errors lead to outliers, results that appear to differ markedly from all other data in a set of replicate measurements. 3-24 Copyright © 2011 Cengage Learning 3A-4 Classifying Experimental Errors Various statistical tests can be done to determine if a data point is an outlier. 3-25 Copyright © 2011 Cengage Learning 3B Systematic Errors Systematic errors have a definite value, an assignable cause, and are of about the same magnitude for replicate measurements made in the same way. Systematic errors lead to bias in measurement technique. Note that bias affects all the data in a set in approximately the same way and that it bears a sign. 3-26 Copyright © 2011 Cengage Learning 3B-1 How do Systematic Errors Arise? Three types of systematic errors: (1) Instrument errors are caused by imperfections in measuring devices and instabilities in their components. (2) Method errors arise from non-ideal chemical or physical behavior of analytical systems. (3) Personal errors result from the carelessness, inattention, or personal limitations of the experimenter. 3-27 Copyright © 2011 Cengage Learning 3B-1 How do Systematic Errors Arise? Instrument Errors All measuring devices are sources of systematic errors: pipets, burets, and volumetric flasks. These differences arise from using glassware at a temperature that differs significantly from the calibration temperature, from distortions in container walls due to heating while drying, from errors in the original calibration, or from contaminants or scratches on the inner surfaces of the containers. 3-28 Copyright © 2011 Cengage Learning 3B-1 How do Systematic Errors Arise? Instrument errors Electronic instruments are subject to instrumental systematic errors. These uncertainties have many sources. For example, errors emerge as the voltage of a battery-operated power supply decreases with use. Instrument Errors are detectable and correctable. 3-29 Copyright © 2011 Cengage Learning 3B-1 How do Systematic Errors Arise? Method Errors The nonideal chemical or physical behavior of the reagents and reactions upon which an analysis is based often introduce systematic method errors. Such sources of nonideality include the slowness and incompleteness of reactions, the instability of species, nonspecificity of most reagents, and possible interference. 3-30 Copyright © 2011 Cengage Learning 3B-1 How do Systematic Errors Arise? Method Errors In Figure 3-3, the results by analysts 3 and 4 show a negative bias that can be traced to the chemical nature of the sample, nicotinic acid. The compounds containing a pyridine ring are incompletely decomposed by the sulfuric acid ; hence, the negative errors in Figure 3-3 are likely systematic errors from incomplete decomposition of the samples. 3-31 Copyright © 2011 Cengage Learning 3B-1 How do Systematic Errors Arise? Method Errors Errors inherent in a method are often difficult to detect and are thus the most serious of the three types of systematic error. 3-32 Copyright © 2011 Cengage Learning 3B-1 How do Systematic Errors Arise? Personal Errors Measurements requiring personal judgments. Judgments of this type are often subject to systematic, unidirectional errors. An analyst who is insensitive to color changes tends to use excess reagent in a volumetric analysis. Physical disabilities are often sources of personal determinate errors. A universal source of personal error is prejudice. 3-33 Copyright © 2011 Cengage Learning 3B-1 How do Systematic Errors Arise? Personal Errors Number bias is another source of personal error that varies considerably from person to person. The most common number bias encountered in estimating the position of a needle on a scale involves a preference for the digits 0 and 5. Also prevalent is a prejudice favoring small digits over large and even numbers over odd. Color blindness amplifies personal errors in a volumetric analysis. 3-34 Copyright © 2011 Cengage Learning 3B-2 What Effects Do Systematic Errors Have on Analytical Results? Systematic errors may be either constant or proportional. The magnitude of a constant error does not depend on the size of the quantity measured. Proportional errors increase or decrease in proportion to the size of the sample taken for analysis. 3-35 Copyright © 2011 Cengage Learning 3B-3 Detecting Systematic Instrument and Personal Errors Systematic instrument errors are usually corrected by periodic calibration of equipment. The response of most instruments changes with time. Most personal errors can be minimized by care and self-discipline. 3-36 Copyright © 2011 Cengage Learning 3B-4 Detecting Systematic Method Errors Bias in an analytical method is particularly difficult to detect. One or more of the following steps can recognize and adjust for a systematic error in an analytical method. 3-37 Copyright © 2011 Cengage Learning 3B-4 Detecting Systematic Method Errors Analyzing Standard Samples Analyzing standard reference materials, SRM, is the best way to estimate the bias of an analytical method. The SRM Materials contain one or more analytes at wellknown or certified concentration levels. Standard materials can sometimes be prepared by synthesis. Standard reference material can be purchased from a number of governmental and industrial sources. 3-38 Copyright © 2011 Cengage Learning 3B-4 Detecting Systematic Method Errors Analyzing Standard Samples The concentration of one or more of the components in these materials has been determined in one of three ways: (1) by analysis with a previously validated reference method; (2) by analysis by two or more independent, reliable measurement methods; or (3) by analysis by a network of cooperating laboratories that are technically competent and thoroughly knowledgeable with the material being tested. 3-39 Copyright © 2011 Cengage Learning 3B-4 Detecting Systematic Method Errors Standard reference materials from NIST. (Photo courtesy of the National Institute of Standards and Technology.) 3-40 Copyright © 2011 Cengage Learning 3B-4 Detecting Systematic Method Errors Using an Independent Analytical Method If standard samples are not available, a second independent and reliable analytical method can be used in parallel with the method being evaluated. A statistical test must be used to determine whether any difference is a result of random errors in the two methods or due to bias in the method under study. 3-41 Copyright © 2011 Cengage Learning 3B-4 Detecting Systematic Method Errors Performing Blank Determinations Blank determinations are useful for detecting certain types of constant errors. In a blank determination, or blank, all steps of the analysis are performed in the absence of a sample. The results from the blank are then applied as a correction to the sample measurements. Blank determinations reveal errors and correct data. 3-42 Copyright © 2011 Cengage Learning 3B-4 Detecting Systematic Method Errors Varying the Sample Size Constant errors can often be detected by varying the sample size. 3-43 Copyright © 2011 Cengage Learning 3C The Nature of Random Errors All measurements contain random errors. Random, or indeterminate, errors occur whenever a measurement is made. Caused by many small but uncontrollable variables. The errors are accumulative. 3-44 Copyright © 2011 Cengage Learning 3C-1 What Are the Sources of Random Errors? Imagine a situation in which just four small random errors combine to give an overall error. We will assume that each error has an equal probability of occurring and that each can cause the final result to be high or low by a fixed amount ±U. Table 3-1 shows all the possible ways the four errors can combine to give the indicated deviations from the mean value. 3-45 Copyright © 2011 Cengage Learning Table 3-1 3-46 Copyright © 2011 Cengage Learning Figure 3-4 Figure 3-4 Frequency distribution for measurements containing (a) four random uncertainties, (b) ten random uncertainties, and (c) a very large number of random uncertainties. 3-47 Copyright © 2011 Cengage Learning Figure 3-4 For a sufficiently large number of measurements, we can expect a frequency distribution like that shown in Figure 3-4a. The ordinate is the relative frequency of occurrence of the five possible combinations. 3-48 Copyright © 2011 Cengage Learning Figure 3-4 Figure 3-4b shows the theoretical distribution for ten equal-sized uncertainties. 3-49 Copyright © 2011 Cengage Learning Figure 3-4 For a very large number of individual errors, a bell- shaped curve like that shown in Figure 3-4c results. Such a plot is called a Gaussian curve or a normal error curve. 3-50 Copyright © 2011 Cengage Learning Table 3-2 3-51 Copyright © 2011 Cengage Learning 3C-2 Describing the Distribution of Experimental Data This 0.025 mL spread of data, from a low of 9.969 mL to a high of 9.994 mL, results directly from an accumulation of all the random uncertainties in the experiment. Rearrange Table 3-2 into frequency distribution groups, as in Table 3-3. 26% of the data reside in the cell containing the mean and median value of 9.982 mL and that more than half the results are within ± 0.004 mL of this mean. 3-52 Copyright © 2011 Cengage Learning 3C-2 Describing the Distribution of Experimental Data The frequency distribution data in Table 3-3 are plotted as a bar graph, or histogram (labeled A in Figure 3-5). As the number of measurements increases, the histogram approaches the shape of the continuous curve shown as plot B in Figure 3-5 (a Gaussian curve, or normal error curve). 3-53 Copyright © 2011 Cengage Learning Figure 3-5 Figure 3-5 A histogram (A) showing distribution of the 50 results in Table 3-3 and a Gaussian curve (B) for data having the same mean and same standard deviation as the data in the histogram. 3-54 Copyright © 2011 Cengage Learning Sources of random uncertainties Many small and uncontrollable variables affect even the simple process of calibrating a pipet. The cumulative effect of random uncertainties is responsible for the scatter of data points around the mean. Statistics only reveal information that is already present in a data set. Do not confuse the statistical sample with the analytical sample. 3-55 Copyright © 2011 Cengage Learning Sources of random uncertainties (1) visual judgments, such as the level of the water with respect to the marking on the pipet and the mercury level in the thermometer (2) variations in the drainage time and in the angle of the pipet as it drains (3) temperature fluctuations, which affect the volume of the pipet, the viscosity of the liquid, and the performance of the balance (4) vibrations and drafts that cause small variations in the balance readings. 3-56 Copyright © 2011 Cengage Learning 3D Treating Random Errors with Statistics The random, or indeterminate, errors in the results of an analysis can be evaluated by the methods of statistics. Ordinarily, statistical analysis of analytical data is based on the assumption that random errors follow a Gaussian, or normal, distribution. 3-57 Copyright © 2011 Cengage Learning 3D Treating Random Errors with Statistics Sometimes analytical data depart seriously from Gaussian behavior, but the normal distribution is the most common. We base this discussion entirely on normally distributed random errors. 3-58 Copyright © 2011 Cengage Learning 3D-1 Samples and Populations In statistics, a finite number of experimental observations is called a sample of data; this is different from the term used in chemical analysis. Statisticians call the theoretical infinite number of data a population, more specifically a parent population, or a universe, of data. 3-59 Copyright © 2011 Cengage Learning 3D-1 Samples and Populations Statistical laws must be modified substantially when applied to a small sample because a few data points may not be representative of the population. 3-60 Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves Figure 3-6a shows two Gaussian curves in which the relative frequency y of occurrence of various deviations from the mean is plotted as a function of the deviation from the mean. The equation for a Gaussian curve has the form 3-61 Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves The equation contains just two parameters, the population mean μ and the population standard deviation σ. 3-62 Copyright © 2011 Cengage Learning Figure 3-6 (a) Figure 3-6 Normal error curves. The standard deviation for curve B is twice that for curve A; that is, σB = 2σA. (a) The abscissa is the deviation from the mean in the units of measurement. (b) The abscissa is the deviation from the mean in units of σ. Thus, the two curves A and B are identical here. 3-63 Copyright © 2011 Cengage Learning Figure 3-6 (b) 3-64 Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves • The Population Mean μ and the Sample Mean x Sample mean = x , where when N is small Population mean = μ, where when N → ∞ 3-65 The difference between x and μ decreases rapidly as N reaches over 20 to 30. Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves The Population Standard Deviation (σ) σ is a measure of the precision or scatter of a population of data, which is given by the equation (3-5) where N is the number of data points making up the population. 3-66 Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves The Population Standard Deviation (σ) The two curves in Figure 3-6a are for two populations of data that differ only in their standard deviations. The standard deviation for the data set yielding the broader but lower curve B is twice that for the measurements yielding curve A. The precision of the data leading to curve A is twice as good as that of the data that are represented by curve B. 3-67 Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves The Population Standard Deviation (σ) Figure 3-6b shows another type of normal error curve in which the abscissa is now a new variable z, which is defined as (3-6) z is the deviation of a data point from the mean relative to one standard deviation. That is, when x – μ = σ, z is equal to one; when x – μ = 2σ, z is equal to two. 3-68 Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves The Population Standard Deviation (σ) A plot of relative frequency versus this parameter yields a single Gaussian curve that describes all populations of data regardless of standard deviation. 3-69 Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves The Population Standard Deviation (σ) Variance: The square of the standard deviation σ2. A normal error curve has several general properties: (1) The mean occurs at the central point of maximum frequency, (2) there is a symmetrical distribution of positive and negative deviations about the maximum, (3) there is an exponential decrease in frequency as the magnitude of the deviations increases. 3-70 Small random uncertainties are more common. Copyright © 2011 Cengage Learning 3D-2 Characterizing Gaussian Curves Areas under a Gaussian Curve Regardless of its width, 68.3% of the data making up the population will lie within the bounds bracketed by ±1σ. Approximately 95.4% of all data points are within ±2σ of the mean and 99.7% within ±3σ. These are shown in Figure 3-6. Because of such area relationships, the standard deviation of a population of data is a useful predictive tool. 3-71 Copyright © 2011 Cengage Learning Feature 3-2 For μ = 0, x = ±σ 3-72 Copyright © 2011 Cengage Learning Feature 3-2 For μ = 0, x = ±2σ 3-73 Copyright © 2011 Cengage Learning Feature 3-2 For μ = 0, x = ±3σ 3-74 Copyright © 2011 Cengage Learning 3D-3 Finding the Sample Standard Deviation Equation 3-5 must be modified for a small sample of data. Thus, the sample standard deviation s is given by the equation (3-7) The quantity N – 1 is called the number of degrees of freedom. 3-75 Copyright © 2011 Cengage Learning 3D-3 Finding the Sample Standard Deviation An Alternative Expression for Sample Standard Deviation (3-8) 3-76 Copyright © 2011 Cengage Learning Example 3-3 The following results were obtained in the replicate determination of the lead content of a blood sample: 0.752, 0.756, 0.752, 0.751, and 0.760 ppm Pb. Calculate the mean and the standard deviation of this set of data. 3-77 Copyright © 2011 Cengage Learning Example 3-3 To apply Equation 3-8, we calculate x i and 2 ( x i ) / N 2 3-78 Copyright © 2011 Cengage Learning Example 3-3 3-79 Substituting into Equation 3-8 leads to Copyright © 2011 Cengage Learning 3D-3 Finding the Sample Standard Deviation Note in Example 3-3 that the difference between Σx2i and (Σxi)2/N is very small. If we had rounded these numbers before subtracting them, a serious error would have appeared in the computed value of s. To avoid this source of error, never round a standard deviation calculation until the very end. 3-80 Copyright © 2011 Cengage Learning 3D-3 Finding the Sample Standard Deviation What Is the Standard Error of the Mean? For replicate samples, each containing N measurements, are taken randomly from a population of data, the mean of each set will show less and less scatter as N increases. The standard deviation of each mean is known as the standard error of the mean and is given the symbol sm. (3-9) 3-81 Copyright © 2011 Cengage Learning 3D-4 The Reliability of s as a Measure of Precision The rapid improvement in the reliability of s with increases in N makes it feasible to obtain a good approximation of σ when the method of measurement is not excessively time consuming and when an adequate supply of sample is available. 3-82 Copyright © 2011 Cengage Learning Pooling Data to Improve the Reliability of s Pooled data from a series of similar samples accumulated over time provide an estimate of s that is superior to the value for any individual subset. Assume the same sources of random error in all the measurements. 3-83 Copyright © 2011 Cengage Learning Pooling Data to Improve the Reliability of s To obtain a pooled estimate of the standard deviation, spooled, deviations from the mean for each subset are squared; the squares of all subsets are then summed and divided by an appropriate number of degrees of freedom. 3-84 Copyright © 2011 Cengage Learning Feature 3-4 Equation for Calculating Pooled Standard Deviations The equation for computing a pooled standard deviation from several sets of data takes the form where N1 is the number of results in set 1, N2 is the number in set 2, and so forth. The term Nt is the number of data sets that are pooled. 3-85 Copyright © 2011 Cengage Learning Example 3-4 The mercury in samples of seven fish taken from Chesapeake Bay was determined by a method based on the absorption of radiation by gaseous elemental mercury. 3-86 Copyright © 2011 Cengage Learning Example 3-4 Calculate a pooled estimate of the standard deviation for the method, based on the first three columns of data: 3-87 Copyright © 2011 Cengage Learning Example 3-4 The values in the last two columns for specimen 1 were computed as follows: 3-88 Copyright © 2011 Cengage Learning Example 3-4 The other data in columns 4 and 5 were obtained similarly. Then One degree of freedom is lost for each of the seven samples. 3-89 Copyright © 2011 Cengage Learning 3D-5 Alternative Terms for Expressing the Precision of Samples of Data Other than sample standard deviation , three other terms are often employ in reporting the precision. The variance (s2) is 1. (3-10) 3-90 People who do scientific work tend to use standard deviation rather than variance as a measure of precision. Copyright © 2011 Cengage Learning Relative Standard Deviation (RSD) and Coefficient of Variation (CV) 2. Relative standard deviation: 3. Coefficient of variation (CV) (3-11) 3-91 Copyright © 2011 Cengage Learning 3D-5 Alternative Terms for Expressing the Precision of Samples of Data Spread or Range (w) Another term to describe the precision of a set of replicate results. It is the difference between the largest value in the set and the smallest. Example: The spread of the data in Figure 3-1 is (20.3 – 19.4) = 0.9 ppm Fe. 3-92 Copyright © 2011 Cengage Learning Example 3-5 For the set of data in Example 3-3, calculate (a) the variance, (b) the relative standard deviation in parts per thousand, (c) the coefficient of variation, and (d) the spread. 3-93 Copyright © 2011 Cengage Learning Example 3-5 In Example 3-3, we found x = 0.754 ppm Pb and s = 0.0038 ppm Pb (a) s2 = (0.0038)2 = 1.410-5 0.0038 0.754 0.0038 0.754 1000ppt = 5.0ppt (c) CV = 100% = 0.50% (d) w = 0.760 – 0.751 = 0.009 (b) RSD = 3-94 Copyright © 2011 Cengage Learning 3E-1 The Standard Deviation of Sums and Differences Consider the summation Absolute standard deviations 3-95 Copyright © 2011 Cengage Learning 3E-1 The Standard Deviation of Sums and Differences The summation could be as large as +0.02 + 0.03 + 0.05 = + 0.10, or as small as – 0.02 – 0.03 – 0.05 = – 0.10, or any value lies between these two extremes, or even – 0.02 – 0.03 + 0.05 = 0 or + 0.02 + 0.03 – 0.05 = 0 3-96 Copyright © 2011 Cengage Learning Variance and Propagation of Errors The variance of a sum or difference is equal to the sum of the individual variances, which demonstrate how the errors propagate. If y = a + b – c For the computation The variance of y, S2y is given by 3-97 Copyright © 2011 Cengage Learning Table 3-4 3-98 Copyright © 2011 Cengage Learning 3E-2 The Standard Deviation of Products and Quotients 3-99 Copyright © 2011 Cengage Learning 3E-2 The Standard Deviation of Products and Quotients As shown in Table 3-4, the relative standard deviation of a product or quotient is determined by the relative standard deviations of the numbers forming the computed result. 3-100 Copyright © 2011 Cengage Learning 3E-2 The Standard Deviation of Products and Quotients Applying this equation to the numerical example gives we can write the answer and its uncertainty as 0.0104(±0.0003). 3-101 Copyright © 2011 Cengage Learning 3F Reporting Computed Data One of the best ways of indicating reliability is to give a confidence interval at the 90% or 95% confidence level as we describe in Section 3G-2. Another method is to report the absolute standard deviation or the coefficient of variation of the data. A less satisfactory but more common indicator of the quality of data is the significant figure convention. 3-102 Copyright © 2011 Cengage Learning 3F-1 The Significant Figure Convention A simple way of indicating the probable uncertainty associated with an experimental measurement is to round the result so that it contains only significant figures. The significant figures in a number are all the certain digits plus the first uncertain digit. 3-103 Copyright © 2011 Cengage Learning 3F-1 The Significant Figure Convention A zero may or may not be significant depending on its location in a number. A zero that is surrounded by other digits is always significant (such as in 30.24 mL). Zeros that only locate the decimal point for us are not. 3-104 Copyright © 2011 Cengage Learning 3F-2 Significant Figures in Numerical Computations Sums and Differences For addition and subtraction, the number of significant figures can be found by visual inspection. the second and third decimal places in the answer cannot be significant because 3.4 is uncertain in the first decimal place 3-105 Copyright © 2011 Cengage Learning 3F-2 Significant Figures in Numerical Computations Products and Quotients A rule of thumb sometimes suggested for multiplication and division is that the answer should be rounded so that it contains the same number of significant digits as the original number with the smallest number of significant digits. 3-106 Copyright © 2011 Cengage Learning 3F-2 Significant Figures in Numerical Computations The first answer would be rounded to 1.1 and the second to 0.96. If we assume a unit uncertainty in the last digit of each number in the first quotient, however, the relative uncertainties associated with each of these numbers are 3-107 Copyright © 2011 Cengage Learning 3F-2 Significant Figures in Numerical Computations Because the first relative uncertainty is much larger than the other two, the relative uncertainty in the 1 result is also 24 ;the absolute uncertainty is then Therefore, the first result should be rounded to three significant figures or 1.08, but the second should be rounded to only two; that is 0.96. 3-108 Copyright © 2011 Cengage Learning 3F-2 Significant Figures in Numerical Computations Logarithms and Antilogarithms 1. 2. 3-109 In a logarithm of a number, keep as many digits to the right of the decimal point as there are significant figures in the original number. In an antilogarithm of a number, keep as many digits as there are digits to the right of the decimal point in the original number. Copyright © 2011 Cengage Learning Example 3-7 Round the following answers so that only significant digits are retained: (a) log 4.000 105 = –4.3979400 and (b) antilog 12.5 = 3.162277 1012. (a) 3-110 Following rule 1, we retain 4 digits to the right of the decimal point (b) Following rule 2, we may retain only 1 digit Copyright © 2011 Cengage Learning 3F-3 Rounding Data A good guide to follow when rounding a 5 is always to round to the nearest even number. For example, 0.635 rounds to 0.64 and 0.625 rounds to 0.62. We should note that it is seldom justifiable to keep more than one significant figure in the standard deviation because the standard deviation contains error as well. 3-111 Copyright © 2011 Cengage Learning 3F-4 Rounding the Results from Chemical Computations The uncertainty of the result is estimated using the techniques presented in Section 3E. Finally, the result is rounded so that it contains only significant digits. It is especially important to postpone rounding until the calculation is completed. At least one extra digit beyond the significant digits should be carried through all the computations to avoid a rounding error. This extra digit is sometimes called a “guard” digit. 3-112 Copyright © 2011 Cengage Learning 3G Confidence Limits 1. Defining a numerical interval around the mean of a set of replicate analytical results within which the population mean can be expected to lie with a certain probability. This interval is called the confidence interval. 2. Determining the number of replicate measurements required to ensure at a given probability that an experimental mean falls within a certain confidence interval. 3. Using the least-squares method for constructing calibration curves. 3-113 Copyright © 2011 Cengage Learning 3G Confidence Limits Confidence limits define a numerical interval around that contains μ with a certain probability. A confidence interval is the numerical magnitude of the confidence limit. 3-114 Copyright © 2011 Cengage Learning 3G-1 Finding the Confidence Interval When s Is a Good Estimate of σ confidence limits (CL) (3-15) 3-115 Copyright © 2011 Cengage Learning 3G-1 Finding the Confidence Interval When s Is a Good Estimate of σ 3-116 Copyright © 2011 Cengage Learning 3G-2 Finding the Confidence Interval When σ Is Unknown (3-17) 3-117 Copyright © 2011 Cengage Learning Table 3-6 3-118 Copyright © 2011 Cengage Learning 3H Analyzing Two-dimensional Data: The Least-squares Method A statistical technique called regression analysis provides the means for objectively obtaining such a line and also for specifying the uncertainties associated with its subsequent use. 3-119 Copyright © 2011 Cengage Learning 3H-1 Assumptions of the LeastSquares Method The method of least squares is used to generate a calibration curve, two assumptions are required. The first is that there is actually a linear relationship between the measured variable (y) and the analyte concentration (x). The mathematical relationship that describes this assumption is called the regression model, which may be represented as where b is the y intercept (the value of y when x is zero) and m is the slope of the line. 3-120 Copyright © 2011 Cengage Learning 3H-2 Computing the Regression Coefficients and Finding the Least-Squares Line The vertical deviation of each point from the straight line is called a residual. 3-121 Copyright © 2011 Cengage Learning 3H-2 Computing the Regression Coefficients and Finding the Least-Squares Line 1. The slope of the line m: 2. The intercept b: 3. The standard deviation about regression sr : 3-122 Copyright © 2011 Cengage Learning 3H-2 Computing the Regression Coefficients and Finding the Least-Squares Line 4. The standard deviation of the slope sm : 5. The standard deviation of the intercept sb : 6. The standard deviation for results obtained from the calibration curve sc : 3-123 Copyright © 2011 Cengage Learning 3H-2 Computing the Regression Coefficients and Finding the Least-Squares Line The standard deviation about regression sr (Equation 3-24) is the standard deviation for y when the deviations are measured not from the mean of y (as is usually the case) but from the straight line that results from the least-squares analysis: 3-124 Copyright © 2011 Cengage Learning 3H-2 Computing the Regression Coefficients and Finding the Least-Squares Line The standard deviation about regression is often called the standard error of the estimate or the standard error in y. 3-125 Copyright © 2011 Cengage Learning THE END 3-126 Copyright © 2011 Cengage Learning