2.2 Sub circuit
advertisement

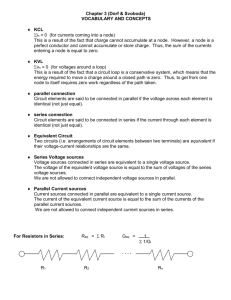
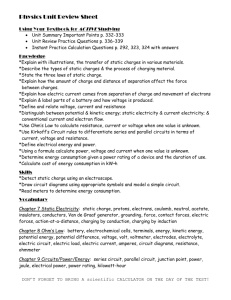
2.2 Sub circuit In this section, the theory of the sub circuit is presented. The first parts describe the role of protection, faults, fault calculations and theory about parts that can be used in a safety circuit. In the second part, some different ways in measuring currents and voltages are described. In the last section, the theory behind pulse width modulation is introduced. 2.2.1 Role of protection and Faults A power system fault can be defined as: ”any condition or abnormality of the system which involves the electrical failure of primary equipment, the reference to primary (as opposed to ancillary) equipment implying equipment such as generators, transformers, busbars, overhead lines and cables and all other items of plants which operate at power system voltage” [12]. There is a risk for a power system with a connected fault, that one or more of the three following effects will occur: The individual generators, or a group of generators, lose synchronism. This leads to a splitting of the system. Large risk of damage to affected plant. Risk of damage to healthy plant. Much of the electronic components in a substation are sensitive to high voltage and currents. Because of the mentioned effects, a protection system that can remove a part on which a fault has occurred is necessary. The faults in a power system can be divided into four different groups [12]: Short-circuited phases Open-circuited phases Simultaneous faults Winding faults Short-circuited phases are caused by insulation failure. The failure can either be between phase conductors or between a phase conductor and earth (or both) see Figure 2.33. Three-phase clear of earth Three-phase-to-earth Phase-to-phase Single-phase-to-earth Two-phase-to-earth Phase-to-phase and single-phase-to-earth Figure 2.33. Different types of short-circuit faults. A three-phase fault of earth or clear of earth is the only balanced fault (symmetrical short-circuit condition). A three-phase short-circuit is often used as a standard fault condition. For example, to decide a systems fault-level, a quote of the three-phase shortcircuit value is often used [12]. An open-circuited phase occurs when one or more phases have problem to conduct, see Figure 2.34. This condition cause unbalance for the systems voltage and currents. Single-phase open-circuit Two-phase open-circuit Three-phase open-circuit Figure 2.34. Open-circuit faults that can occur in a three phase system. Simultaneous faults are when two or more faults of the same or of different types occur at the same time. Winding faults occurs in transformer and machine windings and consist mainly of shortcircuits from one phase winding to earth. 2.2.1.2 Fault calculations Fault calculations are based on a normal behaviour of a system, when the system is in a steady state. To calculate the relations between currents, voltages and impedances, three basic laws are used; Ohm’s law First law of Kirchhoff Second law of Kirchhoff. When these three laws are not fulfilled, there is something wrong with the circuit. Ohm’s law states that the vector voltage drop, V, produced by a vector current, I, flowing through complex impedance, Z, is given by Equation 2.47 and illustrated in Figure 2.35 V I Z (2.47) I Z V Figure 2.35. Illustration of Ohm’s law. Kirchoff´s first law states that the vector-sum of all currents in a circuit should be zero; I i 0 (2.48) i The vector currents that flows into a node are treated as positive inflowing currents and the vector currents that flow out from a node are treated as negative. I2 I1 I3 I4 I1 + I2 - I3 - I4 = 0 Figure 2.36. Kirchhoff´s first law. Kirchhoff´s second law states that in any closed electric circuit the vector sum of all the driving voltage is equal to the vector sum of the products of impedance and current in each part of the network; V I Z i i i (2.49) i i V1 Z1 I1 Z4 V2 I2 I4 Z2 V4 I3 Z3 V3 V1 + V2 + V3 + V4 = I1 Z1 + I2 Z2 + I3 Z3 + I4 Z4 Figure 2.37. Kirchhoff’s second law. In a three-phase system, each phase has the same self-impedance and the voltage is divided equally between the phases. The three-phase currents and the three-phase neutral voltage will be equal in magnitude at a given point in the system and displaced 1200 from each other in time-phase. This condition is called for positive-sequence phase-order and the currents and voltages are often termed positive-sequence currents and voltages (see Figure 2.38). Ic Vc Va Ib 0 0 Vb Ia Figure 2.38. Phase-diagram for the positive-sequence voltages and currents. The mathematical relations for the voltages and currents in figure 2.38 are: Ib x2Ia I c xI a 2 Vb x Va Vc xVa (2.50) The 1200 operator x is given by: 1 3 x j 1120 0 2 2 (2.51) An unbalanced condition in a three-phase system can be represented by the sum of three sets of balanced (symmetrical) vectors [12]; positive-sequence set, negative-sequence set and zero-sequence set. The positive-sequence set has already been discussed. The negative sequence set is similar to the positive-sequence but the phase-order is the reverse, it rotates in the phase order a, c, b. The zero-sequence set consists of three vectors that are equal in magnitude and phase. c c a a 0 0 0 a b C b b Positive-sequence Zero-sequence Negative-sequence Figure 2.39. Phase-diagram for the different sequences. An unbalanced three-phase vector system with the currents, Ia, Ib and Ic, the subscripts a, b and c denotes the three phases. The positive-, negative- and zero phase-sequence are denoted by a second subscript 1, 2 and 0, respectively and I a I a1 I a 2 I a 0 I b I b1 I b 2 I b 0 I I I I c1 c2 c0 c (2.52) Equation 2.52 can with help of the 1200 operator and the reference phase be written as: 1 2 I 1 3 I a xIb x I c 1 2 I 2 I a x I b xI c 3 1 I 3 3 I a I b I c (2.53) With help of Equation 2.47 – 2.53, the voltages and currents can be calculated at a fault in a three-phase system [12]. 2.2.2 Safety circuit The safety circuit consists of two parts; one protects the main circuit (and generator) from over currents and the other part protects the main circuit (and generator) from over voltages. Relay protection systems are used to protect the circuit from over currents. A relay protection system consists of a relay or relay-group with accessories. The relay protection system gives an impulse to switch off a certain construction part (or switch off a signal) at a fault or an abnormal condition in the construction. To protect the circuit from over voltages, variable resistors are used. 2.2.2.1 Relays The concept relay is often used to describe a component that can control a contactfunction with help of a voltage (or current). This type of relay is for example used in telephone-stations or in cars. In power system, the concept relay has a more extensive meaning. According to IEEE, the definition of a relay is [11]: “An electric device that is designed to interpret input conditions in a prescribed manner and after specified conditions is met to respond to cause contact operation or similar abrupt change in associated electric control circuits.” Figure 2.40. Circuit symbol for a relay. Figure 2.40 shows the circuit symbol for a relay, COM (common contact) is the moving part of the switch, NO stands for normally open and COM is connected to this when the relay is on and COM is connected to NC (normally closed) when the relay is off. There are several types of relays and many of them have the same basic construction with just a few distinctions. In this assignment, the relays will be divided into two main groups, comparators and auxiliary relays with subgroups. Comparators, or measuring relays, should detect and measure abnormal conditions and then send a “signal” to close contacts (breakers). Auxiliary relays repeat a controlling signal. This second group is also called “all or nothing” relays or “non measuring relays” [12]. These two groups can in turn be divided in to sub groups. If the relay must not be time delayed, the relays for over current protection are comparators. The most common comparators for over current protection are electromagnetic relays, moving coil relays and static relays [11]. The electromagnetic relay or attracted-armature relay consists of an iron core with an armature, a multi turn coil wound around a core and an air gap see Figure 2.41. Figure 2.41 Mechanical operation of an electromagnetic relay. When an AC current flow thought the coil contacts, the coil will be energised and the core becomes temporally magnetised. The magnetised core attracts the armature (see the metal arm in Figure 2.41) with a force. The armature is then pivoted so it moves in line with the magnetic field and operates one or more contacts. In Figure 2.41, COM is moved to the NO contact when the coli are energised and the relay is on. When the coil is deenergised, the armature and contacts are released and the relay is off again. The electromagnetic relay has a simple construction, a long lifetime and is one of the most common relay [12]. A moving coil relay consists of a permanent magnet, a coil and a circular iron core. The moving coil relay utilises a DC as the incoming signal and the AC is therefore often rectified in a Graetz’s semiconductor bridge that consists of four diodes [11] (the diodes are discussed in section 2.1). The moving coil relay and the bridge are illustrated in Figure 2.42. Permanent magnet Ir Coil Iron core COM Figure 2.42. To the left, the moving coil relay and to the right, the relay and diode bridge. When a current, ir, flows through the movable coil, the coil is exposed to a torque, m, which is proportional to ir and COM is moved to the NO contact. A static relay consists of a static measure circuit and a fast electromagnetic relay. The incoming current is often rectified in a Graetz semiconductor bridge before the relay, just as the moving coil relay. With a static measuring circuit, the relay power consumption can be neglected [11]. The working principle for the static relay is illustrated in Figure 2.43. (A) V Va A Vc Vb C B D Vr V Open Va Vb=0 (B) V Va Vr Vc=0 Vb Vc (C) Closed Vz Figure 2.43.(A) A block scheme for the measure circuit where A is an amplifier, B a duster (vippa), C an integrating unit and D the electromagnetic relay. (B) The incoming signal V is too small and Vb=0 because Va<Vr, the relay will not have a function. (C) Va>Vb and Vc>Vz the relay functions. The function value for the relay is decided from the relation between the reinforcement in the amplifier A and the value of the reference quantities Vr and Vz. Tow conditions must be fulfilled before the relay will function and these are (see Figure 2.43 (B) and (C) for an example): Va Vr and Vc V z (2.54) 2.2.2.2 Electric-connector, circuit breaker The instruments that let through or stop currents are called electric-connectors. The breakers used in a high voltage power system should break and close normal load currents and should be able to break any short-circuit who can occur at a fault. Power breakers and disconnectors are often used in high voltage power systems. They can break, close and under a certain time lead the short circuit current. In low voltage power systems, breakers with a break-capacity that can handle couplings at normal load-currents are used. The most common types are switch-disconnectors and contactors. Fuses are often used as a complement to break short-circuits in low voltage systems [17]. Figure 2.44. Circuit symbol for a circuit breaker. A switch-disconnector can break the load current but not short-circuit currents. The switch-disconnector is manoeuvrable by hand and they can therefore not be used in this substation. A contactor makes it possible to have one circuit to switch a second circuit. A low voltage battery circuit can for example switch a high voltage circuit. The circuits have no electrical connection to each other; they are connected mechanical and magnetic. A contactor is similar to an electromagnetic relay, both uses a magnetic coli to close a contact, but the contactor is designed to break a high current load. Figure 2.45. Different parts in a contactor. 1: Part fixes magnetic circuit. 2: Moving part of the magnetic circuit. 3: Winding. 4: Screw of connection of the reel, part orders. 5: Mechanical connection. 6: Insulating part. 7: Mobile contacts 1 for this example. Contactors have a long lifetime because the movable contact operates with a coil and not with a spring, this leads to a small piece of movable details and this leads to a less damage on the contactor. In electrical circuits, fuses are often used as a complement to the contactors because they have a shorter switching time. Fuses are the most common devices to use for turning off an incorrect construction part [17]. The fuse can carry load currents and will break the circuit when the current become higher than a settled value. Melt-fuses are often used in low voltage systems. The main part of a melt fuse is the fuse element. Usually, the element is made of silver or silver covered with cupper. The element is enclosed in a porcelain cartridge filled with sand. When the current rice over a certain value (called fuse voltage rating) the element melts and the current will break. The sand makes it easier to put out the light bow that occurs in the break moment and helps to lead away the generated heat [17]. The problem with this type of fuse is when they once has cleared a current it has to be replaced. Another type of fuse used in low voltage system is the automatic fuse. This fuse can sometimes be called a self-resetting fuse. Figure 2.46. An automatic fuse. This type of fuse observes the current in two different ways. The fuse turns off the circuit after a certain time depending on the current, at moderate over currents, this is done by a terminal protection and the circuit will be restored when it is cold. At higher over currents, an electromagnetically controlled breaker in the fuse instantaneously offconnect the circuit. 2.2.2.3 Instrument transformer An instrument transformer is an electrical device that transfers energy from one circuit to another. Instrument transformers are often used in substations to measure currents and voltages or to operate a safety circuit, relay. A measure transformer and a transformer for protection are constructed similar to each other, but they have different requirements. A measure transformer should have a good accuracy in the given measure interval and a low secondary current is preferable at over currents to protect the measure instrument. A transformer for protection does not have the same demand in measure-accuracy but the transformer should have a reasonable measure-accuracy at high over currents. The different types of instrument transformers are often termed CT for current transformers, VT for voltage transformers. The CT is the same as a short circuit transformer, the voltage is almost zero, and can be described with Equation 2.55. The VT is described with Equation 2.56 and can be seen as an idling transformer: IP NP IS NS VP N P VS N S (2.55) (2.56) A CT produces an alternating current or an alternating voltage that is proportional to the primary current. The CT:s can be divided into two basic types, wound and toroidal. A wound CT consists of primary windings in series with the conductor. The toroidal CT does not have a primary winding. Usually, these CT:s have a circular core with the secondary windings around the core (current out) and the primary winding will be the “sensed conductor”, see Figure 2.47. Figure 2.47. A toroidal CT. Wound CTs are often used when the primary current is low, the primary winding must then be strengthening whit more wounding around the core to produce a better secondary current [23], see Equation 2.55. ZH 1:n ZL Rm Burden (ZB) Xm a) Ip 1:n Ip /n RL Ie IL Xm Burden (ZB) b) Figure 2.48. a) Equivalent circuit for a CT. b) Reduced equivalent circuit for a CT. Figure 2.48 a) illustrates an approximate equivalent circuit for a current transformer. ZH is the primary leakage impedance and ZL is the secondary impedance. Rm and Xm are the exiting components and represent the core loss. This circuit can be reduced to the circuit in Figure 2.48 b). The primary impedance is neglected since it does not influence the transformed current Ip/n or the voltage over Xm. The Rm branch has a negligible influence on the circuit and can be neglected. The current through the other branch Xm, the magnetizing branch, is the exiting current Ie. The biggest problem with a current transformer is when the core saturates. The performance of a CT is its ability to reproduce the primary current in the secondary winding. A CTs performance can be determined in three different ways (with the assumption that the primary current is symmetrical i.e. it does not include a DC component) [27]: By formula By the current transformer excitation curves By transformer relaying accuracy classes For all these three methods, the generated secondary voltage, VS, must be known; VS I S Z L Z lead Z B (2.57) where VS = rms secondary induced voltage IS = maximum secondary current ZB = connected impedance ZL = secondary winding impedance Zlead = connecting lead impedance In the formula method, the maximal flux before saturation is calculated. Bmax VS 4.44 N S A f (2.58) where f = frequency. VS = secondary e.m.f in volts NS = the number of turns in the secondary winding A = the net core section in sqare meters If Bmax is larger than the CTs given saturation level, the secondary current has errors. In the excitation curve method, the primary current is plotted versus the secondary current. This curve is done in five steps. First, assume the secondary current, IL, the secondary voltage, VS, is then (second) calculated from Equation 2.57. Third, find the exiting current, Ie. For a given secondary voltage, VS, Ie approximately can be estimated from the excitation curve for the CT, Figure 2.49. Figure 2.49. Excitation curves for a CT [29]. The excitation curve has a linear region and a non linear region. In the linear legion, the exciting current increases with an increasing secondary voltage. Exciting current will not exceed the curve value by more than 25%. In the non linear region, the exciting current increases more with an increasing secondary voltage. The exciting current will not be less than 95% of the curve value. When Ie is known, the primary current can be calculated; I P I S I e NS NP (2.59) The last step is to repeat the four first steps and plot the values of the primary current versus the values of the secondary current. For any given value of the primary current, the secondary can be estimated with help of the plotted curve, an example of a curve is shown in Figure 2.50. IS IP Figure 2.50. Example of a curve plotted with help of the excitation curve method. This method incurs an error when IP is calculated by adding Ie and IS together arithmetically, in a correct way, they should be seen as vectors and be added as vectors. Transformer relaying accuracy classes are according to IEC standards described in terms of protection and measurement classes in Europe [27]. The protection limit classes have the designation P and the standards factors are 5, 10, 15, 20 and 30. A CT label 5P has a maximum error of 5% at the maximum rated current. The maximum current is specified in terms of an accuracy limit current [30]. The accuracy limit factor is a ratio of the accuracy limit current and the rated current. A current transformer for protection is specified in terms of the burden VA at rated current. If the VA burden is known, the coil impedance, or the impedance of burden, can be calculated; Zb VA(burden ) I S2 (2.60) where IS = rated secondary current The total relay impedance can now be calculated and a new calculated value of the burden can be compared with the label burden of a CT. These three methods requires that the CT is in a steady state and do not take into account the DC transient component of the fault current. There are two factors that produce a DC component [27]: 1) The current in an inductance cannot change instantaneously. 2) The steady state current before and after a change must lag (or lead) the voltage by the proper power factor angle. Equation 2.61 gives a condition for the saturation of a CT [27]. Vk 6.28I R T where (2.61) Vk = voltage at the knee of the saturation curve I = symmetrical secondary current R = total secondary resistance T = DC time constant of the primary circuit T can be calculated from T LP f RP (2.62) LP = primary circuit inductance RP = primary circuit resistance f = frequency If Equation 2.61 is fulfilled, the DC component of a fault will not produce saturation in the CT. 2.2.2.4 Variable resistor A variable resistor can in short be called a varistor [20]. Varistors are voltage dependent resistors with a symmetrical V/I characteristic curve whose resistance decreases whit increasing voltage. Figure 2.51. a) Varistor symbol. b) The V/I ideal characteristic curve of a varistor. The resistance in a varistor can be changed in two different ways. In the first way, the resistance in the varistor can be adjusted by hand, like the volume adjustment of a CDplayer. The second way is to use a non linear two-electrode semiconductor voltagedependent resistor. These types of varistors are used to fine-tune a circuit and to compensate for the inaccuracies of the resistor. To stop a surge voltage in a circuit, the varistor absorb pulse energy in the bulk of the material so only a relatively small increase in voltage appears and thereby protecting the circuit. Every real voltage source has, and therefore also every surge voltage, a voltageindependent impendence, Zsource, greater than zero. Zsource can for example be the resistance in a cable or the inductive reactance of a coil. When a surge voltage occurs, a current, i, will flow across Zsource and Ohm’s law states that the relation between the voltage and current is v source Z source i (2.63) where vsource is the voltage over Zsource. Zsource V ZVAR VVAR Figure 2.52. An equivalent scheme with the voltage-independent source impedance, Zsource, and a voltage-dependent varistor, ZVAR. V is the voltage source and VVAR is the voltage after the varistor. The varistor, ZVAR, in Figure 2.52 will cause a proportional voltage drop across Zsource and voltage division gives: ZVAR v vVAR Z Z source VAR (2.64) The voltage drop that ZVAR causes is almost independent of the current and this result in a voltage drop over Zsource, the circuit parallel to ZVAR will be protected. Curve a Curve b Figure 2.53. The principle of over voltage protection by varistors. On top, an equivalent scheme with a fault is illustrated and at the bottom, the protection by the varistor is illustrated in two curves [22]. The operating voltage, VB, and the surge voltage VS are illustrated in Figure 2.53, Curve a. The surge voltage amplitude 1 will be reduced to 2 by the varistor. The intersection of “the load line” with the V/I characteristic curve in Curve b gives the surge current amplitude and the protection level, i.e. the protection level can be decided from the characteristic curve of the varistor. 2.2.3 Measure part The currents and the voltages in the circuit should be measured with good accuracy in the measuring part. Currents and voltages can be measured by using instrument transformers, but the easiest way is to use resistors. 2.2.3.1 Current measuring At current measuring, a device with a low resistance should be coupled in series with the circuit, so all current flows thorough it. A current measuring device should have a small inner resistance because this result in a small affect on the system. An ideal instrument therefore has the inner resistance equal to zero. One way to measure the current is to use a shunt. A shunt is defined as [25]: “a device which allows electrical current to pass around another point in the circuit”. Shunts have high temperature accuracy and have a certain mark current, the highest current the shunt can measure. Figure 2.54. A shunt. Shunts have an accurately known resistance and by measuring a voltage drop over the shunt, a current can be calculated according to Ohm’s law. Current measuring with a shunt results in a small signal level requiring amplification. One other disadvantage with the shunt is that the cable must be split up. The advantages with a shunt is the prize (it is cheaper than other measure devises) do not need any isolation or any extern voltage source. One other way to measure current is to use a LEM Hall Effect current sensor. The Hall Effect can be defined as [32]: “If an electric current flows through a conductor in a magnetic field, the magnetic field exerts a transverse force on the moving charge carriers which tends to push them to one side of the conductor. This is most evident in a thin flat conductor. A build up of charge at the sides of the conductors will balance this magnetic influence, producing a measurable voltage between the two sides of the conductor. The presence of this measurable transverse voltage is called the Hall Effect after E. H. Hall who discovered it in 1879.” The disadvantages with a LEM current sensor is the prize, they are relative expensive, it is a more complex device than a shunt. The LEM current sensor also needs an extern voltage source and the accuracy is not quite as good as in the current shunt. With a LEM current sensor, the cable must not be split up and the signal does not need any amplification. 2.2.3.2 Voltage measuring The main principle in voltage measuring is to have an instrument that measures a potential difference between two measuring points. In a low voltage system, the voltage can be measured directly without any transformations before measuring [24]. A voltmeter is often used to measure the voltage directly. The voltmeter is always coupled in parallel with the circuit. The inner resistance, RV, should in contrast to the shunt be as large as possible; an ideal voltmeter has an infinite resistance. Rv V V Figure 2.55. In-coupling of a voltmeter. 2.2.4 Control circuit To get a desired out-put signal from a DC to AC-inverter, each transistor in the inverter is fed with a gate signal. The signal can be seen as a sample of pulses with the value 1 or 0, the transistor is totally conducting at 1 and it is not conducting at 0. These pulses resemble a pattern and can be created with help of PWM (Pulse Width Modulation). Angle (degrees) Figure 2.56. Pulses from the PWM to the different gates. Figure 2.56 shows an example of the pulses to the gates in a three phase inverter. There is a phase difference 600 between the pulses and the transistors on the same “phase-line” will have a phase different at 1800 because the line will be short-circuited if both of the transistors are leading at the same time. 2.2.4.1 PWM-Pulse Width Modulation There are several different PWM techniques used to modulate the inverter switches to form the output AC to be as close to a sinusoidal shaped wave as possible. In this section, the sinusoidal PWM is discussed in detail and some other PWM techniques are presented briefly. To create a pulse pattern in sinusoidal PWM, a triangle shaped wave, Vtri, is compared with a control signal, Vcont (a sinusoidal wave), see Figure 2.57. Vcont should have the same frequency, fm, as the desired frequency of the wave out from the IGBT, fout [10]. Vcont Vˆcont sin t (2.65) Figure 2.57. Control signal and triangle wave. The switching frequency of the output signal from the PWM is dependent up on the triangular wave frequency, fs, (fs can sometimes be called carrier frequency). The triangular wave frequency is often kept constant and the switch frequency will get the same value as fs. fs is often created with help of a resistor and a capacitor connected to an oscillator. f m f out and f s f switch (2.66) Figure 2.58. Pulse out from the PWM and the control signal (dashed curve). The control signal decides the width of the pulses, under how long time the transistor is in a conducting condition. By varying the control signal, the out coming voltage and current can be changed. The time when the pulses are equal to zero is called the deadtime. The amplitude-modulation ratio, ma, and the frequency-modulation ratio are two important parameters in PWM. The modulation ratio for the amplitude is: ma Vˆcont Vˆ (2.67) tri Vˆcont is the peak amplitude of the control signal and the peak amplitude of the triangle wave is Vˆ ( Vˆ is generally kept constant). tri tri Different values of ma give different conditions on the modulation; For ma 1, the amplitude on the voltages keynote varies linear with ma, this makes the modulation simple to control. The harmonics is in a high frequency range around the switching frequency. When the control signal increases, the time when the voltage of the triangular waveform is greater than the control signal voltage decreases, the output pulse duration will therefore decrease. ma >1 results in over-modulation. The amplitude of control signal is not linear against ma and the out voltage will contain more harmonics than the case ma 1 and the harmonics with dominant amplitudes in the linear range may not be dominant during over-modulation [10]. For ma >>1, the wanted pulse signal is a square-wave with the same frequency as the control signal. Figure 2.59. Voltage-regulation by varying ma [28]. The relation for the frequency-modulation ratio is mf fs fm (2.68) There are several factors that decide the choice of fs and mf. The switch frequency is often chosen as high as possible [10]. A high switch frequency results in a better shape of the out coming wave from the IGBT, but the switch-losses in the transistor increases in proportional with fs. The relation between the switch frequency and the control signal frequency is dependent on the value of mf, see Equation 2.68. According to [10] is mf = 21 the limit between a small and a large value of mf. When mf is small, the triangle wave and the control signal should be synchronized to each other and mf should be an integer, otherwise sub-harmonics will occur. When mf is large, the triangle wave and the control signal do not have to be synchronized with each other because the amplitude of the sub–harmonics is small. The harmonics numbers for bipolar voltage switching in a sinusoidal PWM is n j mf k (2.69) Equation 2.69 is satisfied when ma≤1. j and k are integers and for odd values of j, only even values of k are possible and vice versa. The fundamental frequency is denoted by n=1. In the case of over modulation, the harmonic content will be higher, the harmonics for the two cases are shown in Figure 2.60. a b Figure 2.60. a, Harmonics for a sinusoidal PWM when ma≤1. b, Harmonics for a sinusoidal PWM when ma>1. For a unipolar (the switches are not switching simultaneous) voltage switching the harmonics contents will be less than for bipolar voltage switching [28]. In a three phase inverter system, the triangular voltage waveform is compared with three sinusoidal control voltages which have a 1200 phase different to each other, see Figure 2.61. Figure 2.61. Three-phase PWM waveforms and harmonic spectrum [10]. For a linear modulation (ma≤1), the fundamental-frequency component in the output voltage from the PWM varies linear with ma. In the square wave scheme, the switching frequency of the semiconductors is equal to the output frequency and the output AC voltage has a waveform similar to a square-wave. In this method, only the frequency is controlled. The harmonics in the output is high and therefore, this method is often used in applications with a high frequency output [28]. The square wave modulation has only odd harmonic numbers and for a three-phase inverter, the harmonic numbers are n 6c 1 where c = 1,2,3… (2.70) A programmed harmonic elimination switching is a combination of the sinusoidal PWM and the square wave technique. This technique reduces the harmonics and only some specific odd harmonics will be present [10]. A current-regulated (current-mode) modulation is for example used in DC and AC motor servo drivers and in other applications where the current must be controllable. The measured current (real current) is compared with a reference current and the difference between them is used to control the switches of the inverter. 3. Simulations In this chapter, the filter is simulated with a different number of generators connected to it. The AC from the generators is rectified in six-pulse diode bridges and then, the DC is filtrated. The aim of the filter simulations is to see how the performance of the filter varies with the number of connected generators and to decide what values of the filter components that are necessary to get a smooth DC output. After the filter simulations, a simple model of a PWM is simulated. Last, the complete system with ten generators, rectification, filtration and DC to AC inversion is simulated. The simulations are done in MATLAB and in PSpice. The voltage equations for the linear generators are implemented in MATLAB and the data is stored in files and then used as an input for the generators in PSpice. An example of a three phase MATLAB simulated linear generator output voltage is shown in Figure 1.3. The simulations of the bridge and filter, PWM and IGBT are done in PSpice. 3.1 Voltage from the linear generator A modeled voltage from the linear generator can be described with equation 3.1 [33] e(t ) 2Bt t dpqch p 2h cost sin sin t p (3.1) The values for the parameters in Equation 3.1 are listed in Table 3.1. Parameter Name Value Unit Magnetic field in tooth Bt 1.55 T Tooth width ωt 8 mm Width of stator side d 400 mm Total number of poles p 100 Winding ratio q 6/5 slots/ (pole, phase) Number of cables in slot c 6 Translator motion height h 1 m Wave angular frequency Ω 1.2566 rad/s Pole pair width ωp 100 mm Phase displacement δ rad Table 3.1. Values of the parameters in equation 3.1. The phase displacement, δ, will vary so the voltage out from one generator has a phase difference 2π/3. The wave height will be constant in the simulations, but in reality, the waves vary in amplitude. 3.2 AC to DC Figure 3.1 shows the first circuit setup that is simulated in PSpice. e(t) R L G RLOAD e(t) R E L G Figure 3.1. Simulation of the rectification in the six pulse diode bridge. Two generators are coupled in parallel in this figure, but the number of generators connected in parallel will vary in the simulations. The generator resistance and inductance are constant in all simulations and are listed in Table 3.2. In these simulations, the generators are designed to generate a mean power of 10kW each. The burden, RLOAD, will vary dependent on how many generators that are connected to the substation because the total generated power will vary. The max power, Pmax, can be calculated over the load resistor as: 2 Pmax I DC max R Load (3.2) and the max power over E is: Pmax I DC max E (3.3) Parameter Name Value Unit Generator resistance and cable resistance R 0.5 Ω Generator inductance L 11.5 mH DC voltage E 200 V Table 3.2. Constant parameters in the simulations [33]. The simulations are divided into different cases depending on how many generators that are simulated and how the time shift between the generators are. The simulations are listed in Table 3.3. Case 1 Case 2 Case 3 Case 4 Number of generators Displacement (A) [rad] 1 — 2 π 5 2π/5 10 π/5 Displacement (B) [rad] — 3π/5 4π/25, 3π/5, π , 9π/5 4π/25, π/5, 3π/5, 18π/25, 4π/5, 28π/25, 7π/5, 8π/5, 42π/25 Table 3.3. Different simulation cases. Displacement A: the displacement is ideal the generators have the same displacement between each other. Displacement B: The displacement is chosen at random. 3.3 Filter The DC after the rectifier bridge includes a lot of ripples and is far from an ideal DC, a filter is therefore necessary. The filter after the rectifier is illustrated in Figure 3.2. L C1 DC IN DC OUT C1 L Figure 3.2. Simulation setup for the filter. The values of the components will be calculated with equations from the theory in Chapter 2 and the simulations of the rectifier for the different cases. The capacitor, C, in the filter is calculated by Equation 2.26 to get a ripple voltage below 4%. The DC choke, will be used in those cases where the current ripples are big to help the capacitor to filter the DC. 3.4 PWM The ground principle for a PWM is a control wave, a triangular wave and a comparator. The comparator compares the control wave with a triangular wave and creates a pulse pattern. Three different simulations are done on the PWM. Vcont [V] Vtri [V] Modulation index ma Simulation 1: 0.7 1.0 0.7, linear modulation Simulation 2: 1.05 1.0 1.05, over modulation Simulation 3: 1.4 1 1.4, over modulation Table 3.4. Different PWM simulations. Figure 3.3. Coupling scheme for the PWM circuit in PSpice. 3.5 AC to AC One simulation is done on the whole substation (the simulation do not includes the safety system), with ten generators with a purely resistive load at 10 Ohm. The coupling scheme used in PSpice is shown and described in appendix A. In the simulations, the IGBT bridge consists of four IGBT:s and this results in one phase out. A PWM is controlling the IGBT:s and supplying the gate with a Voltage to control the on and off state of the IGBT:s. The switching frequency is set to 2 kHz, and the modulation index ma is 0.9. The control wave to the comparator has a frequency of 50Hz. The purpose with the substation is to connect ten generators and transform their voltage to a 50Hz sinusoidal wave. 4. Experiment: DC to AC inverter In the experiment, a DC to AC inverter is built and the main goal is to get a deeper understanding of PWM and IGBT bridge technique. The inverter built here consists of an IGBT bridge, a PWM and a drive circuit. The different tests on the parts will be presented in this chapter. 4.1 Experimental test setup The IGBT Bridge consists of two IGBT:s connected in one arm, the connections of the bridge is shown in Figure 4.1. DC input + Vdc - Upper IGBT IGBT Lower IGBT IGBT G C E G C E AC output Vac Figure 4.1. IGBT Bridge. The wirings in Figure 4.1 are colored to see the connections clearly; different colors will be used in the real test setup. The red wire goes from the positive DC side to the collector in the upper IGBT. The black wire is connected to the emitter on the lower IGBT. Connection between the upper and lower IGBT is done by the blue wire, this wire goes from the emitter on the upper IGBT to the collector on the lower IGBT. The AC output is showed with the yellow wire that comes from the collector on the lower IGBT. The gate to the IGBT:s are not connected to the drive circuit in this figure, the connection will be shown in Figure 4.3. The IGBT:s will be clamped to a heat sink to keep them cold, a fan or other devices can be used together with the heat sink to lower the temperature even more. The DC input will be provided with a DC voltage unit and the output will be examined by an analog oscilloscope. To create the pulses to the gate on the IGBT, a gate driver and a PWM are used. The coupling scheme of the drive circuit and the PWM is shown in Figure 4.2 and 4.3. R3 R8 R2 R1 R4 CL RL R5 C1 1 2 3 4 5 6 7 16 15 14 13 PWM 12 11 10 8 9 R7 R6 Output sinals to the gate driver Figure 4.2. Coupling scheme for the PWM. 12V To get the right signal with the right amplitude to the gates, the outputs from the PWM are connected to a gate driver. D1 12V 1 2 3 4 5 6 7 8 IN IN R9 12 13 28 27 26 25 24 23 22 21 20 19 18 17 16 14 15 9 10 11 C2 RG RG R10 Figure 4.3. Gate driver circuit with input to the IGBT arm. The gate driver has a capacity to drive six gates, a three-phase bridge. The experiment setup consists of two IGBTs which results in two gates that must be controlled. The type of IGBT, PWM and driver used in the experiment are presented in Table 4.1. To get a further description of the devices, the datasheets are presented in appendix. Component IGBT Gate driver PWM Name Datasheet Appendix B IR2130 International IOR Rectifier Appendix C TL494 Texas Instruments Appendix D Table 4.1. Names of the main components used in experiment. The equipment for the experiment is shown in Figure 4.4. Figure 4.4. a) Two DC power supplies. b) A function generator. c) Digital oscilloscope. The DC power supplies are used to generate a DC signal into the IGBT arm and to drive the PWM and gate driver. A function generator is used to generate a voltage with a sinusoidal wave form, which creates the desired pulses in the PWM. The measurements and curves are done with the help of a digital oscilloscope. The constructions of the PWM and gate driver on the circuit board can be seen in Figure 4.5 a) and b). Figure 4.5. a) PWM circuit board. b) Gate driver circuit board. Pictures of the IGBT arm is shown in Figure 4.6 and the significant parts are marked in Figure 4.6 a. a) b) Figure 4.6. a) IGBT arm. The marked parts are: 1. DC + voltage from DC power supply 2. AC voltage out to the load 3. DC- voltage 4. IGBT on a heat sink 5. Emitter 6. Gate 7. Source 8. High side input from the gate driver 9. Supply return to driver 10. Low side input from the gate driver b) The IGBT arm from the side. 4.2 Experiments Five different tests will be done on the PWM, driver and IGBT. The first four testes are done on the PWM and the last test is on the whole system. Test 1: The switching frequency of the triangle wave. RL is 50kΩ and the pulse width is constant. The calculated value of the switching frequency of the triangle wave is (see appendix C): ftricalc= 1/(RL·CL) = 20kHz (4.1) Test 2: Linear modulation (ma ≤ 1) with a sinusoidal wave. Test 3: Over modulation (ma > 1) with a sinusoidal wave. At over modulation is the control signal sometimes greater than the triangle wave which results in an enabled out signal, the output gradually merge. Test 4: Square modulation (ma >> 1) with a sinusoidal wave. In the square region, all of the on-time pulses are merged. Test 5: The IGBT arm is tested with a linear modulation of the incoming pulses from the driver (as in test 3) to the gate. 5. Results The results from Chapter 3 and 4 are presented in this chapter. 5.1 Diode rectifier The result for the different cases is shown in Figure 5.1-5.7. In Case 1, one generator is rectified, E is holding the potential between positive voltage and the negative voltage, otherwise the voltage would reach zero in this case. In Case 2a, the DC current never reaches zero, the smaller current peak between the larger on is formed when the to currents is imposed on each other. This peaks will grove in size when more currents are involved and gives a raise in the current, this can be seen in Case 3a4b. In Case 2b and 3b, the current has big ripples because they are imposed on each other at one time and far away from each other at another time. The small ripples seen in voltage are done by the diode rectifier and are about 30-50Hz. This noise makes it harder to se the low frequency ripples. This is clearer in Case 3a-4b but the rippled current is easier to see. In Case 3a and 3b, the importance to keep the generators in perfect phase between each other is shown. In Case 3a, the low frequency ripples is almost gone and in 3b the low frequency ripples is very clear. In Case 4a, the DC is almost constant accept for the higher frequency ripples, and Case 4b shows some of the lower frequencies. The simulation of the diode rectification agrees well with the theory. Figure 5.1. The voltage and current over the load in case 1, one generator. Figure 5.2. Case 2a, the voltage and current from two generators with an ideal time displacement. Figure 5.3. Case 2b, the voltage and current over the load from two generators. Figure 5.4. Case 3a, the voltage and current over the load from five generators with an ideal time displaced. Figure 5.5 Case 3b, the voltage and current over the load from five generators with a time displacement that is chosen randomly. Figure 5.6. Case 4a, the voltage and current over the load from ten generators with an ideal time displacement. Figure 5.7. Case 4b, the voltage and current over the load from ten generators with a time displacement that is chosen randomly. 5.2 Filter simulations The values for the capacitance, C and the voltage ripple DC is shown in Table 5.1. The output DC for each case is shown in Figure 5.9-5.17. For case 1, 2b and 3b, the current has big ripples as can be seen in simulation from the rectification to help the capacitor with the filtration an inductor is placed in series this improves the current ripples and lower the value of the capacitor. Table 5.2 shows the value of the inductor, capacitor and the ripple voltage. Figure 5.8 compare capacitance to the number of generators connected in parallel here, the time displacement is ideal between each generator. The ripple period for the voltage and current in the different cases arises from the phases of the different generators, the ripple frequency gets higher when the number of generators is increasing and out of phase. In Figure 5.9, 5.11, 5.14 and 5.17, the DC is clearly getting better with increasing numbers of generators. In Case 3a, 4a and 4b the use of a large capacitor is gone, the ripples consist mostly of higher frequency done by the rectifier. This higher frequency is about 30-50Hz and in the simulations, this frequency was reduced much below 1V. C [F] Case 1 6 V (ripple %) 4.1 Case 2a 1.6 3.3 Case 2b 7 3.6 Case 3a 0.26 2.8 Case 3b 8 3.8 Case 4a 0.08 --Case 4b 0.12 --Table 5.1. Calculated values for the capacitor. C[F] L[H] V (ripple %) Case 1 5.5 0.5 3.9 Case 2b 4 0.5 3.3 Case 3b 2 0.5 3.9 Table 5.2. Simulated values for the capacitor together with an inductor. 7 6 5 C [F] 4 Series1 3 2 1 0 0 2 4 6 8 10 12 Number of Generators Figure 5.8. Capacitance VS number of generators, the generator has perfect phase between each other. Figure 5.9. Case 1, the filtrated voltage and current from one generator, measured over the load, filtered with a capacitor. Figure 5.10. Case 1, the filtrated voltage and current from one generator, measured over the load, filtered with an inductor and a capacitor. Figure 5.11. Case 2a, the filtrated voltage and current from two generators, with an ideal time displacement, measured over the load, filtered with a capacitor. Figure 5.12. Case 2b, the filtrated voltage and current from two generators, with a time displacement chosen randomly, measured over the load, filtered with a capacitor. Figure 5.13. Case 2b, the filtrated voltage and current from two generators, with a time displacement chosen randomly, measured over the load, filtered with an inductor and a capacitor. Figure 5.14. Case 3a, the filtrated voltage and current from five generators, with an ideal time displacement, measured over the load, filtered with a capacitor. Figure 5.15. Case 3b, the filtrated voltage and current from five generators, with a time displacement chosen randomly, measured over the load, filtered with a capacitor. Figure 5.16. Case 3b, the filtrated voltage and current from five generators, with a time displacement chosen randomly, measured over the load, filtered with an inductor and a capacitor. Figure 5.17.Case 4a, the filtrated voltage and current from ten generators, filtered with a capacitor. Figure 5.18.Case 4b the filtrated voltage and current from ten generators, with a time displacement chosen randomly, measured over the load, filtered with a capacitor. 5.3 Results of PWM The three results from the simulations are presented and then, the results from the experiment are presented in the following sections. 5.3.1 Simulation 1 In Simulation 1, the PWM is tested in the linear region, see Figure 5.19. Figure 5.19. The pulses out from the comparator (blue curve) and the control wave and triangular wave. The result from this simulation agrees very well with theory. The pulse width varies with the amplitude of the control wave. 5.3.2 Simulation 2 and 3 The simulations in the over modulation region are presented in Figure 5.20 a) and b). The results are as expected, the pulses is merged in the over modulation region. Figure5.20. a) The modulation index is just into the over modulation region. b) The pulses are clearly merged. 5.3.3 Test 1 Figure 5.21 shows the simulation of the triangle wave and the pulses out from the PWM with a constant pulse width. a) b) Figure 5.21. a) Test 1, the pulse train out from the PWM. b) The two pulses out in a push-pull operation. The switching frequency of the measured triangle wave is: ftri= 20.05kHz and ftri ~ ftricalc The simulated value agrees well with the calculated value. The pulse out, as expected from theory is constant when the control voltage is constant. In Figure 5.21 b), one of the pulses can be seen as an inverse of the other pulse, i.e. one of the curves is an inversion of what is expected. 5.3.4 Test 2 The result from Test 2, linear modulation, is shown in Figure 5.22. The orange curve is the pulses out from the PWM and the blue curve is the control wave. Figure 5.22. Test 2, linear modulation, the upper curve is the pulses out from the PWM and the lower cure is the signal from the function generator. The dead time of the pulses decreases when the control signal amplitude increases, as expected from the theory. Due to the high switching frequency the pulses are hard to see and a sequence is therefore enlarged. 5.3.5 Test 3 In Figure 5.23 a), ma is just into the over modulation region (ma is almost one) and a split can be seen in the pulses when the control wave reaches its peak value. In Figure 5.23 b), the pulse is clearly merged when the control signal is in the region for over modulation. a) b) Figure 5.23. Test 3 over modulation. a) The control wave is a little bit over 3V. b) ma is in the over modulation region. 5.3.6 Test 4 The results from the test on square modulation agrees quite well with the theory, see Figure 5.24. Here, the output signal is almost merged all the time. The pulses out from the PWM can be seen as a square wave and have almost the same frequency as the control wave. Figure 5.24. Test 4, square modulation. 5.3.7 Test 5 The voltage out from the IGBT-arm is shown in Figure 5.25. The voltage is a half wave and has a sinusoidal form if the ripples are ignored. The DC voltage into the IGBT is only 23V. The ripples will be constant for different voltages and at a voltage of for example 200V, the ratio between the ripples and the voltage will be smaller, but a filter is still necessary to get a desired wave out from the IGBT-arm. Figure 5.25. Wave out from the IGBT arm at linear modulation. 5.4 AC to AC The AC voltage and current is shown in Figure 5.26. The Voltage is almost a sinus wave with small ripples and it has like the control wave a frequency of 50 Hz. The current is also formed as a sinus wave with a frequency of 50 Hz. The amplitude of the voltage is about 420V and the amplitude of the current is about 40A. The relation between the modulation index, DC voltage and the output amplitude of the AC agrees well with the simulation. Figure 5.26. The blue curve is the sinusoidal wave out from the IGBT bridge and filter and the black curve is the current out. 6. Design of safety circuit In this master thesis, a model of a linear generator is used in the simulations. This model differs from reality; the waves for example, have a varying height which results in a wider spectrum of voltages and currents. The peak power for one linear generator in the simulations is approximately 30kW and in real, the peak power can be much higher. The consequence of this is also; a higher peak voltage and current (only a higher peak current if the generator is voltage regulated) can be expected. In this case, with a linear generator, it is important to decide what currents and voltages that can be expected from the generator. There are two main problems that must be solved before a safety circuit can be designed: 1) What should the voltage and current settings be? 2) The low frequency. The frequency out from the generator is 0-15 Hz and a CT has problem to reproduce a primary current with a low frequency. The problematic to set a limit for a fault is the varying voltage and current. Assume that a fault occurs when the wave climate results in a low voltage and current. The resulting fault current can still be in the “normal” current interval for the generator and can be seen as normal but it is generated by a fault. In this case, with a durable generator, a fault can be seen as a normal condition for the generator and the substation and the fault will not damage any components in the generator. A fault that occurs at a lower voltage can therefore remain in the circuit until the voltage rise and the current rises over the highest current that is accepted in the system. The voltage and current settings for the safety system must therefore be decided on the basis of the highest expected voltage and currents from the generator. The electronics in the substation must be able to manage these voltage and currents. Now, only one problem is left to solve, the low frequency. A CT needs approximately 5Hz to be able to generate a secondary current (the core of the CT must be over dimensioned to be able to reproduce the primary currents at this frequency). This problem is not really a problem any more because faults at lover voltages are accepted. The frequency of the voltage and current is proportional to the velocity of the waves. The high currents and voltages occur when the wave velocity is high and at high voltages the frequency is expected to be about 10-15Hz. The over voltage protection here consist of varistors that leads away the over voltages to logic ground, see figure 6.1 Generator Substation G Figure 6.1. Over voltage protection with varistors. A varistor lifetime is dependent on the value of the currents the varistor is exposed for. A diagram for this is shown in figure 6.2. Figure 6.2. The logarithmic curve with the current on the y-axis and expose-time on the x-axis. The value on the curves tells how many exposes the varistor can handle before it breaks [34]. An over current protection system can be build in many different ways, some of them are more complex than other systems. The substation is placed at the bottom of the ocean and a broken component is not easy to replace. A design example of an over current system is shown in figure 6.3. NO NC COM NO NC COM NO NC COM NO NC COM + - Figure 6.3. An over current protection system. The parts in this over current protection system are CT:s, relays, contactors and a battery. This system includes few components; CT:s, relays, contactors and a battery. When a fault occurs, the CT or CT:s produces a secondary current and the relays (or relays) switch on the battery and the contactor breaks off-connects the linear generator. a) b) c) Figure 6.5 a) Contactor [35] b) Current transformer [36] c) Relay [37] As mentioned in the theory, fuses are often used as a complement in low voltage system, because they have a faster function time than the breakers. The linear generators do not require a fast safety system and fuses are therefore not necessary. In this construction, no fuses will be used, this reduce the number of components and the fuses must either be replaced or recovered after a releasing which is a problem in this case. This protection system does not protect the circuit from high DC currents, which is a draw back with the system. 7. Discussion In this project, a design of a substation for two or more wave generators was examined. A substation consists of a number of devices such as safety circuits, converter, inverters, transformers, filter and voltage-regulators to mention some of the parts. These parts are presented in the theory. Simulations and experiments are done on some of the parts, but not at all of them. The aim of this work is more to present a design for the substation. Further work is needed in detail on the different parts to get a more accurate design. The analytic model of the linear generator was done in MATLAB and the rectification of the AC from the generator was done in Pspice, the results of these simulations were successful. Pspice was used to simulate the filtration of the ripples in the DC after the rectifier. The results were as expected less filtering was needed with an increasing number of generators, if the phase difference was the same for each generator. When the phases between the generators where random, the filtering action increase, this is very important in the design of the filter. Also the AC amplitude from the generators will have impact on the filter size. The ocean wave high in this project was set to 1m, this height might vary between each wave power plant and may also increase the filter size. Further studies of these cases are need to size the filter, also a more accurate model or real data from one or more generators needs to be used to get the correct size of the filter. The DC after the diode bridge is unregulated and this DC needs to be regulated. In this work, two models are presented. In the first case, a DC to DC converter is placed after the rectifier and will have a regulated DC as its output. This alternative will make the sub station more complex with more parts and may give more losses such as switching losses. In this case, a transformer is still necessary after the inverter. The second case is a transformer at the output of the inverter that can change its windings depending on the AC output from the inverter to get a desirable level of the AC. This transformer is driven by a motor and a feedback loop to get a regulated AC. If the losses is the same in this kind of transformer as in a step-up or step-down transformer, then this alternative is to prefer compared with the DC to DC converter. In this project it is hard to draw any conclusion about these to cases, because no simulations or experiments have been done. The choice between them has to be grounded on simulations and experiments that might be done in another project. The IGBT bridge with control system for the substation will be similar to the IGBT, PWM and driver circuits described in Chapter 4. The circuits in Chapter 4 were constructed for one IGBT arm and for the substation a circuit with three IGBT arms is needed. The pulse pattern used in the experiment was created with help of a function generator. In reality, the pulses must be controlled with respect to the voltage at the grid. This can be done with a DSP, the frequencies of the three control phase voltages are regulated to the wanted value. In the simulation of the AC to AC, the IGBT:s was controlled by pulses created with a triangular wave, control wave and a comparator. The aim in this simulation was to create one phase AC out from the inverter. According to the results, the simulated circuit has the potential to work in the planned substation in the project Islandsberg. The current measuring in the substation are easiest done with current shunts or LEM Hall Effect current sensors. Instrument transformers are not to prefer because of the low frequency. The two devices have different advantages and disadvantages. A current shunt is cheaper and easier to understand, but the measured signal must be amplified. The LEM shunt is mounted around the cable and the measured voltage do not need any amplification, but the voltage out from a LEM shunt is often noise and a LEM shunt is expensive. The LEM current sensor needs also an external DC source. The current shunt used for measuring high currents, has a higher accuracy than a LEM shunt. Because of the price and accuracy, a current shunt is to prefer for current measuring. The proposal protection system in the substation includes a simple over voltage protection and over current protection system. The linear generator is durable against over currents and over voltages and a more complex system is not needed here. The special with the linear generator protection, is to decide which currents and voltages that are caused by a fault. The wide voltage and current range makes it possible that a current caused by a fault can be in the “normal” current range. In figure 1.4, an over current protection system is placed at the end of the substation, if this protection is necessary or not is hard to decide. The purpose with a safety circuit here is to break the circuit if there are a fault with the voltage and currents out from the substation. Most of the parts in the substation have built-in safety systems, as snubber circuits and a safety circuit at the end of the substation will not protect the parts. The AC is not connected to the grid just after the substation and to have a safety system here is not necessary. But it could be desirable to be able to break the circuit at the end of the substation. Contactors can be placed here and if there is any problem to adjust the three phase voltage after the three phase voltage at the grid, the substation can be offconnected. 8. Conclusion The simulated and the experimental results compared with the calculated values were satisfactory. Simulations of the rectification of the AC with Pspice agreed well with the theory. The filter simulations in Pspice have drawbacks when it comes to the component library but overall the simulations were as expected. The conclusion of the rectification and the filter is the importance of the phase difference of the generator together with the number of generators. The filter has to be oversized but how much is to some degree probability theory of ocean waves. In the ideal cases, when the phase difference between each generator is the same, the filter size will decrease with increasing number of generators. When the generators phase difference between each other where random, the capacitor size increased, in some cases with over 3000% compared with the ideal phase difference. The need of an inductor together with the capacitor in these cases, with high current ripples, increases. The inductor decrease the current ripples and lower the capacitance needed to filter the DC. The inductor also helps reducing harmonics created by the non linear loads. In the simulations, the need of additional filter capacitors for the higher frequency might be needed but where not a big impact on the result in this work. The simulations of the AC to AC circuit with ten generators connected to it works in a proper way. The system was able to connect and transform the incoming AC from the ten generators to a sinusoidal 50 Hz AC which is the main goal with the substation. The simulations and experiments on the PWM agree well with the theory and calculated switching frequencies. The IGBT arm works in a proper way but the AC out from the IGBT must be filtrated. A printed circuit card is to prefer, this reduces the risk for leading faults and coupling faults. The linear generator is dimensioned to manage a wide range of currents and voltages, the demands of the safety system are therefore less than for other generators. 9. Acknowledgement 10. References [1] www.el.agnstrom.uu.se, Karl Åstrand [2] Segergren Erik, K. Nilsson, J. Sundberg, M. Leijon, "The Marine Current Power Project at the Swedish Centre for Renewable Electric Energy Conversion " , Presented at the 6th EWTEC conference in Glasgow, 28th of August to 3rd of September 2005 [3] Thorburn Karin, Eriksson M., Leijon M. “Paramagnet fixation concepts for linear generator” [4] www.americanmicrosemi.com/tutorials/diode.htm [5] www.usace.army.mil/publications/armytm/tm5-689/c-5.pdf [6] www.kettering.edu/~bguru/PE424UCR/3FWR.pdf [7] http://en.wikipedia.org/wiki/Capacitor [8] www.tpub.com/content/neets/14178/ [9]www.joliettech.com/abb_guide-to-harmonics-with-ac-drives.htm [10] Mohan Ned, Undeland Tore M., Robbins William P., Power Electronics, Converters, Applications and Design, second Edition, [11] Berggren Jan, Reläskydd I elkraftsystem,1980. [12] The institution of Electrical Engineers, London, Power system protection Volume 1: Principles and components [13] http://www.eleinmec.com/article.asp?24 [14] http://www.mikroelektronika.co.yu/english/product/books/keu/03.html [15] http://www.ee.surrey.ac.uk/Workshop/advice/coils/mu/index.html#sat [16] http://www.batterycouncil.org/made.html [17] Alfredsson Alf, Elkraft, tredje upplagan Liber AB 2000 [18] Elfving Gunnar, ABB Handbok industri, 1993 [19] http://en.wikipedia.org/wiki/Resistor [20] Dictionary of electronics [21] http://www.epcos.com/inf/70/db/var_01/00610092.pdf [22] http://www.epcos.com/inf/70/db/var_01/00430060.pdf [24] Blomqvist Hans, Elkraft handboken: Elkraftsystem 2,1997 andra upplagan [25] http://en.wikipedia.org/wiki/Shunt_%28electrical%29 [27] Elmore W.A., Protective Relaying Theory and applications, chapter 5 Instrument transformer for relaying, www.engnetbase.com [28] Gisselmann Michael mfl, Power Electronics, ch 5 Invereters, http://www.engnetbase.com/books/447/7336_PDF_C05.pdf [29] http://library.abb.com/GLOBAL/SCOT/scot235.nsf/VerityDisplay/13BFD9F519D 4EEF085256B1700543C57/$File/42-858TS.pdf [30] The institution of Electrical Engineers, London, Power system protection Volume 2: Systems and methods [31] ELFA AB 2005 [32] http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/hall.html [33] Thorburn Karin and Leijon Mats, Farm size comparison with analytical model of linear generator wave energy converters. [34] http://www.farnell.com/datasheets/27968.pdf [35] http://library.abb.com/GLOBAL/SCOT/SCOT209.nsf/VerityDisplay/6DD2DD1E8 D0E8E2DC1256C3F0040738D/$File/%201SBC100129C0201.pdf [36] http://www.injab.se/kwk/kabelstr/kabelstromtransformatorer.htm [37] http://www.elfa.se/se/index1.html [38] http://www.tpub.com/content/neets/14178/index.htm [39] http://www.eetasia.com/ARTICLES/2001AUG/2001AUG23_AMD_AN.PDF [40] http://www.enm.com/training/siemenscourses/acdrives2pdf [41] http://www.cas.web.cern.ch/cas/Warrington/PDF/Visintini.pdf [42] http://www.fujielectric.co.jp/eng/fdt/scd/pdf/manual [43] http://www.fairchildsemi.com/an/AN/AN-9020.pdf Appendix A – Circuit scheme for the AC to AC simulations Appendix B – Datasheet IGBT Appendix C – Datasheet gate driver Appendix D – PWM