CE321-FluidStatics
advertisement

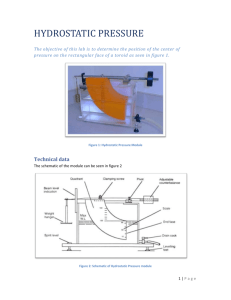
CE 321 INTRODUCTION TO FLUID MECHANICS SPRING 2009 LABORATORY 2: FLUID STATICS OBJECTIVES To experimentally verify the accuracy of the equation derived from hydrostatic theory to predict the location of the center of pressure To determine if uncertainty in measurements appear to explain the inaccuracy in predicting the location of center of pressure using the equation derived from hydrostatic theory To comment on the apparent suitability of the equation derived from hydrostatic theory for use in engineering applications and its advantage over the experimental approach EQUIPMENT Hydrostatic pressure apparatus, set of weights, metric ruler, graduated cylinders SKETCH Figure 1. Hydrostatic Pressure Apparatus 1 HYDROSTATIC THEORY All submerged surfaces experience a hydrostatic force. The point through which this force acts is called the center of pressure. Hydrostatic theory shows that the center of pressure of the submerged area can be calculated using Eq.1. Where yR is the distance of the center of pressure from the fluid surface yc is the location of centroid of the submerged area and Ixc is the second moment of the area. yR I xc yc yc A (1) According to Hydrostatic Theory, the hydrostatic force (FR) on the face of the quadrant is calculated using Eq.2. Where hc is the vertical distance from the fluid surface to the centroid of the submerged area, is the specific weight of the liquid and A is the submerged area. FR hc A (2) These two general equations can be used to develop equations specific to our experiment. Consider the situation when the end face of the apparatus is partially submerged (d< l ). Eq. 2 predicts the hydrostatic force to be: FR 2 d 2w (3) While Eq. 2 is always correct, we have only determined that Eq. 3 applies for those times in our experiment when the end face is partially submerged. It remains to be determined if this equation is suitable for situations when the end face is totally submerged. Eq. 1 predicts the center of pressure lies below the water surface a distance (yR): wd 3 ( ) d 2 12 yR d d 2 3 ( wd )( ) 2 (4) The distance yR can also be determined from the moment arm L 2 determined in the experiment: y R L2 ( L3 d ) (5) 2 We can arrive at similar equations for the condition when the quadrant face is fully submerged. APPROACH While Eq.1 is a well established method for calculating yR, for the purpose of this experiment, you should put yourself in the position of the original investigator of this theory. Begin with the hypothesis that Eq. 1 accurately predicts yR. Compare these values of yR to values determined experimentally by an independent method that relies on basic, well established principals and experimental measurements. A “good agreement” between the two sets of values of yR gives us no reason to reject the Hypothesis. If you find “poor agreement”, you must establish whether this is the result of inaccurate experimental measurements before you can conclude that Eq. 1 may be at fault. Assume that the apparatus shown in Fig. 2 and the experimental procedure described on the next page provide an acceptable independent method for determining yR. The apparatus is designed so that the only hydrostatic force that will rotate the balance arm is the force (FR) that acts perpendicular to the end-area of the quadrant at some unknown distance (L2) below the pivot. This force produces a moment that tends to rotate the balance arm clockwise. This moment is equal to the moment produced by the weight (W) used to prevent the rotation. Knowing W, L 1, and FR, it is possible to calculate L2 and determine yR without using Eq. 1. These experimentally determined values of yR can be compared to values calculated using Eq. 1. All experimental measurements are subject to some unknown amount of error. When measured values (such as L1) are reported, the uncertainty that we have about the true value of this quantity ( L1 ) is also reported. The true value is expected to lie within the limits established by L1 L1 . Use this idea to determine if observed inaccuracies may be the result of inaccurate measurements. If that is the case there is no basis for rejecting the hypothesis that Eq. 1 is accurate. 3 PROCEDURE A. Measure L1 and L3, and estimate their uncertainties, the values of w and l from the quadrant face are given to you. w l Figure 2: Side view of quadrant showing the terms for the dimensions of the face. B. Level the tank. Make sure the quadrant and everything on the balance arm and weight tray are dry. Move the counter balance weight until the balance arm is horizontal; make sure the empty weight tray is in position. Close the drain valve on the tank and fill the tank until the water level reaches the bottom edge of the quadrant, forming a meniscus. This will be the beginning point for data collection. C. Place a known mass on the weight tray. This should move the balance arm out of equilibrium. Slowly add water to the tank until the balance arm returns to equilibrium. Do not use the drain valve to achieve the equilibrium. D. Record the height of the water level (d) above the bottom of the submerged face. This can be read directly from the scale on the quadrant. Record the mass in the weight tray. Estimate the uncertainty in the measurement of d. E. Repeat the above measurement using 40g increments of mass until the water level reaches the maximum reading on the quadrant’s scale. Verify that full submergence of the end face occurs whenever d is equal to or greater than l. F. When you have finished collecting the data, drain the tank. 4 ANALYSIS A. Enter your data into the spreadsheet provided by your TA. B. Plot the experimentally determined values of yR on a graph as a function of the water depth (d). Show 2dyR (2 standard deviations) error bars on the values of yR C. Plot the theoretical relationship between yR and d predicted by Eq. 1on the same graph D. Describe the accuracy of the experimentally determined values of yR. Base your description on the relative errors in yR. These errors are shown in the spreadsheet and were computed by assuming that the experimental values of yR are the true values i.e. the errors were divided by the experimental values of yR to get the % error. E. Identify any trends in the accuracy; base your description on the relative errors in yR. F. Describe how uncertainty in the variables L1, L3, and d influence uncertainty of the experimental values of yR. Base your description on the uncertainty (dyR) and/or the relative uncertainty (dyR / yR) in the experimental values. G. Identify any trends in the uncertainty of the experimental values. H. Determine if the uncertainty in the experimental measurements appears to provide an adequate explanation for any inaccuracies identified in section D above. I. Comment on the apparent suitability of Eq. 1 for engineering use and any advantage over the experimental approach. 5 REPORT Explain how the apparatus works in the introduction section of the report. Make sure that as a minimum you address the following issues: A) Indicate all of the forces that act on the apparatus during a typical measurement when part of the system is below water. B) Provide a sketch that shows all forces and other relevant information. C) Write the moment equation for this situation. D) Explain how the initial balancing of moments and the geometry of the quadrant eliminate the need to specifically determine most of the forces and moment arms. E) State the equation that results once the simplifications implied by D are introduced. 6 PROPAGATION OF UNCERTAINTY FOR PARTIALLY SUBMERGED END AREAS Each of the measurements made to obtain an experimental value of yR is subject to an unknown amount of error. So, while our measurements give us an estimate of each yR, we are uncertain of the true value of each experimental yR. Equations 5, 3 and 6 are employed to determine the experimental values of yR: y R L2 ( L3 d ) FR L2 2 (5) d 2w (3) WL1 FR (6) Substituting Eqs. 5 and 3 into 6 results in: yR WL1 ywd 2 ( L3 d ) (7) 2 The equation for propagating uncertainty in L1, L3, and d into yR can be found to be: (dy R ) 2 ( y R 2 y y ) (dL1 ) 2 ( R ) 2 (dL3 ) 2 ( R ) 2 (dd ) 2 L1 L3 d (8) Then by determining the partial derivatives of Eq. 7 and substituting them into Eq. 8 we get: (dy R ) 2 ( W wd 2 ) 2 (dL1 ) 2 (1) 2 (dL3 ) 2 (1 2 WL1 2 ) (dd ) 2 3 wd 4 (9) Eq. 9 can be used to calculate the uncertainty dyR. 7 CHECK LIST FOR THE STATICS LAB DATA APPEAR TO BE REASONABLE A. Check for obvious problems by looking at the graphical plot of measured values of yR. The values should vary reasonably smoothly with d. If you have one or two that seem to deviate a lot from the smooth plot check your data input to make sure you have not made an error entering data into the spreadsheet. B. Check the values of your uncertainty estimates. Are they reasonable given the measurement device and the circumstances? You don’t want to state a larger uncertainty than you can justify, nor a smaller one that does not correctly characterize the situation. METHODS AND MATERIALS SECTION Make sure that you explained how the apparatus works as directed in the lab statement. RESULTS SECTION The facts are correct, clearly stated, and supported by the data presented. Has the accuracy of the experimentally determined values of yR in relative (%) and absolute (m) terms been described? Have any trends in accuracy been clearly described? Has the uncertainty in yR that is due to uncertainty in L1, L3, and d been accurately described? Have any trends in the uncertainty in yR been clearly described? Are there other important results that should be identified? If so, have they been? DISCUSSION The logical arguments are correct and clearly stated. Make sure your interpretation of the results, as well as your discussion of uncertainty, procedural abnormalities, and surprising results, all make sense. 8 Have you convincingly argued that the uncertainties in L1, L3, and d appear to (or do not appear to) provide an adequate explanation for any inaccuracies identified in D and E (see Analysis section in the lab procedure)? Make sure the important results and conclusions are re-stated in the Conclusions Section and summarized in the Abstract. DEFINITIONS ACCURACY – the extent to which the results of a calculation or the readings of an instrument approach the true values of the calculated or measured quantities, and area free from error ERROR – any discrepancy between a computed, observed, or measured quantity and the true, specified, or theoretically correct value of that quantity UNCERTAINTY – the maximum estimated amount by which an observed or calculated value may depart from the true value 9 10