Homework_Set_SP_13_11_Solutions
advertisement

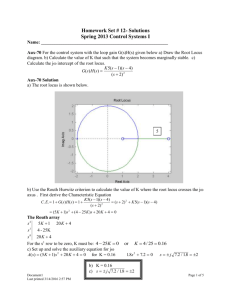
Homework Set #11 Solutions Spring 2013 Control Systems 1 Name: ________________________________________________ Aux-63 Dorf E6.24 Consider the system represented in state variable form x Ax Bu where y Cx Du 0 1 0 0 A= 0 0 1 B= 0 C= 1 0 0 D= 0 -k -k -k 1 a) Determine the system transfer function G(s) using the above matricies. b) Using the Routh - Hurwitz process for what values of k is the system stablr? Solution Aux_63 106767490 Last printed 3/9/2016 9:47 PM Page 1 of 7 Aux_64 - Sketch the Root Locus and determine the breakaway points for K K G( s)H ( s) 3 s ( s 1)( s 2) s 3s 2 2s T ( s) C( s ) K ( s 1) 2 R( s ) s 2s K ( s 1) Solution Aux_64 - Since there are three poles and no zeros in the loop gain function, there must be three zeros at infinity. These zeros must lie on asymptotes at 45 and 180. We have poles at s = 0 and s = -1, therefore the root locus lies on the real axis between 0 and –1. There is no root locus between –1 and –3 because there are an even number of pole/zero entities to the right of that region. The pole at –3 terminates at infinity at -180. Therefore there must be a breakaway point between 0 and –1. To calculate the breakaway points, if there are any, solve the expression (numerator) x (derivative of the denominator) – (denominator) x derivative of the numerator) K K G( s ) H ( s ) 3 s( s 1)( s 2) s 3s 2 2s Breakaway 1(3s 2 6s 2) ( s3 3s 2 2s )( 0) 3s 2 6s 2 0 Solving for the roots s for the above equation s1 = -0.42265 s2 = -1.5773 Since s2 = -1.5773 falls between –1 and –3 where no root locus exists this root cannot be the breakaway point. The root s1 = -0.42265 falls between 0 and –1 where the root locus exists, therefore this must be the 106767490 Last printed 3/9/2016 9:47 PM breakaway point. Page 2 of 7 Aux_65 – (a) Sketch the root locus for the control system shown. (b) Is there a value of K where the system is stable or marginally stable? . R(s) Aux_65 Solution G( s ) H ( s ) +_ K ( s 2) s( s 1)( s 5) C(s) K ( s 2) s( s 1)( s 5) (a) First determine the loop gain: From the loop gain we can see that there are poles at s = 0, -1, and +5. There also is a zero at -2. Since there are two poles and one zero in the loop gain function there must be a zero at infinity that is at -180. (b) Next determine the value of K where the system becomes stable or marginally stable from the Characteristic Equation C . E. s( s 1)( s 5) H ( s 2) s 3 4s 2 ( K 5) s 2 K 0 Clearly the s2 term is negative and no value of K will change that sign, therefore the system is unstable. 106767490 Last printed 3/9/2016 9:47 PM Page 3 of 7 Aux_66 – (a) For the control system shown below plot the root locus of the system characteristic equation as the parameter “a” varies. (b) If the plot intersects the real axis what is the intercept point? R(s) + C(s) 5 s( s a) _ Aux_66 Solution – C.E. 1 (a) First write the characteristic equation: Rewrite the C.E in the form of 1 a 5 0 or s 2 as 5 0 s( s a) Num Den Group the terms that are not multiplied by “a” and divide the equation by these terms. (s 2 5) as 0 and The roots of the loop gain are: 1 a s s2 5 0 s j 5 The pole of the C.E. is s 0 Root Locus 2.5 2 1.5 Imaginary Axis 1 0.5 0 -0.5 -1 -1.5 -2 -2.5 -2.5 -2 -1.5 -1 -0.5 0 Real Axis (b) The intercept point is s = - 106767490 Last printed 3/9/2016 9:47 PM 5 Page 4 of 7 Aux_67– (a) For the loop gain function below sketch the root locus diagram. (b) Approximately calculate the values of the three breakaway points. GH K ( s 1.5)( s 1.6) s( s 1)( s 2)( s 3) Aux_67 Solution (a) Root Locus 4 3 2 Imaginary Axis 1 0 -1 -2 -3 -4 -3 -2.5 -2 -1.5 -1 -0.5 0 Real Axis (b) The breakaway points are approximately s = -0.636, -1.55, and -2.35 106767490 Last printed 3/9/2016 9:47 PM Page 5 of 7 Aux_68 Work part (a) in problem E7.1 in the text book. Solution Aux_68 For the Characteristic Equation C.E. = 1 + s(s + 4) s2 4 s s2 2 s 2 s2 2 s 2 the root locus is: Root Locus 1.5 1 Imaginary Axis 0.5 0 -0.5 -1 -1.5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 Real Axis 106767490 Last printed 3/9/2016 9:47 PM Page 6 of 7 Aux_69 An example of using the Routh-Hurwitz criterion for simple design problems, consider that the characteristic equation of a closed-loop control system is s3 3Ks 2 ( K 2)s 4 0 It is desired to find the range of K so that the system is stable. Aux-69 Solution s3 s 2 1 (K + 2) 3K 4 3K(K + 2) - 4 3K 2 6 K 4 0 or 3K 3K 0 s 4 2 From the s row, the condition of stability is K 0, and from the s1 row, the condition of stability is 3K 2 6 K 4 0 or K 2.528 or K > 0.528 When the conditions of K > 0 and K > 0.528 are compared, it is apparent that the latter requirement is more stringent. Thus, for the closed-loop system to be stable, K must satisfy K > 0.528 The requirement for K < -2.528 is disregarded since K cannot be negative. s1 106767490 Last printed 3/9/2016 9:47 PM Page 7 of 7