mm2
advertisement

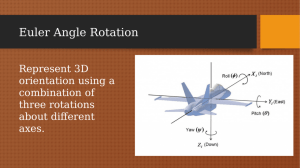
Modelling of Mechanical Systems I Lecture 2 Subject: Euler angles, Quaternions and Kinematics Objectives: 1. To provide understanding of different rotation parameter alternatives and their application areas 2. To provide the students knowledge about rigid body kinematics for the direction cosine matrix, Euler angles and the quaternion Literature: Thomas Bak, Modeling of Mechanical Systems, Aalborg University 2002. page 15-26. Appendix C in “Autonomous Aircraft”, 2005, Finn Jensen, Daniel Pedersen Quaternions Exercises: 1. Let the B frame orientation relative the A be given by the (3-2-1) Euler angles (10, 25, -15) degrees.(θ1 = 10, θ2 = 25, θ3 = -15). Find the corresponding principal axis and angle. 2. What is the geometric condition for which the (3-2-1) Euler angles to encounter a mathematical singularity. 3. Show that the two rotation matrices C(n, θ1) = C1 and C(m, θ2) = C2 commute in multiplication if and only if: nxm=0 4. Show that C.7 in appendix C is equal to 3.51 in Thomas Bak notes