In-Platform Radio Frequency Interference Mitigation for Wireless

Version 1.1 Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
In-Platform Radio Frequency Interference
Mitigation for Wireless Communications
Prof. Brian L. Evans
Graduate Students Kapil Gulati and Marcel Nassar
Undergraduate Students Navid Aghasadeghi and Arvind Sujeeth
Last Updated: May 23, 2007
Version: 1.1
Project website: http://www.ece.utexas.edu/~bevans/projects/rfi/
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
Table of Contents
S) Model ............................................................... 6
S) Model ............................................................... 9
Truncation Analysis and Small Signal Approximation of the Bayesian Detection
2
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
I. Introduction
This project seeks to reduce Radio Frequency Interference (RFI) experienced by the wireless data communication transceivers deployed on a computation platform. In particular, we consider RFI generated by the computing platform itself.
Computing platform subsystems have emissions of varying intensities that interfere with
wireless data transceivers. Table 1 lists the wireless data communication standards of
current interest and the computing platform subsystems that interfere significantly with these standards. The interference from the computing subsystems is dominated by the clocks that drive these systems. With near-field coupling, the interference signals impact the wireless transceivers.
Standard
Carrier
(GHz)
Wireless Networking
Example Interfering
Computer Subsystems
Bluetooth
IEEE
802.11b/g
2.4
2.4
Personal Area Network
Wireless LAN (Wi-Fi)
Gigabit Ethernet, PCI Express
Bus, Memory, Processor, LCD
Gigabit Ethernet, PCI Express
Bus, Memory, Processor, LCD
IEEE 802.11n 2.4
High-Speed
Wireless LAN
Gigabit Ethernet, PCI Express
Bus, Memory, Processor, LCD
IEEE 802.16e
2.5
–2.69
3.3
–3.8
5.725
–5.85
Mobile Broadband
(Wi-Max)
PCI Express Bus, Memory,
Processor, LCD
IEEE 802.11a 5.2 Wireless LAN (Wi-Fi)
PCI Express Bus, Memory,
Processor, LCD
Table 1: Example of computer subsystems interfering with wireless standards ([3], [4], [5])
RFI is a combination of independent radiation events, and predominantly has non-
Gaussian statistics. The key statistical-physical models used for RFI modeling are the
Middleton’s Class A, B and C noise models [6]. Middleton models are well-suited for modeling the predominantly non-Gaussian random processes that arise from the nonlinear phenomena that governs electromagnetic interference. Symmetric Alpha-
Stable processes [10] are also considered in this context primarily due to their mathematically tractable form for parameter estimators and communication detectors. In this report, we will use “noise” and “interference” interchangeably as representing unwanted “signals”.
Mitigation of RFI can be achieved by designing an optimum detector or a non-linear filter based on Middleton models for the interference noise. Parameter estimation for the Middleton models [6] can then be used to design these filters or to aid the optimum
3
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1 detector design. Mitigation of RFI would improve communication performance (e.g. bit error rate) and extend the range of the wireless transceivers.
A brief discussion on the Middleton noise models and Symmetric Alpha Stable
Processes has been presented in Section II. Section III then discusses the parameter estimation techniques for these models, with emphasis on Middleton’s Class A models and Symmetric Alpha Stable models. Optimum detector design for Middleton Class A interference is then discussed in Section IV. Section V concludes the report and discusses future work and long-term vision for the project.
II. RFI Noise Modeling
Two general approaches for modeling electromagnetic interference (EMI) are through physical modeling and through statistical-physical modeling. In physical modeling, each source of EMI would require a different circuit model. Statistical-physical models, on the other hand, provide universal models for accurately modeling EMI from natural and human-made sources. The key statisticalphysical models are the Middleton’s Class A,
B and C noise models [6]. Middleton model are the most widely accepted model for RFI primarily since these models are canonical, i.e. their mathematical form is independent of the physical environment. Middleton models are classified with respect to the receiver bandwidth:
Class A: Narrowband Noise: Interference Spectrum is narrower than the receiver bandwidth
Class B: Broadband Noise: Interference Spectrum is wider than the receiver bandwidth
Class C: Mixed Case: Sum of Class A and Class B
Figure 1: Classification of Middleton Noise Models
The envelope statistics for the Middleton models have been derived in [6] and are summarized as follows:
4
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Middleton Class A Model
Version 1.1
(
)
2 e
A
A
m
0
A
A m
e
2
/ 2
2 m m !
2 m where,
2 m
m
A
A
1
A
A
Hence the Class A model [6] is uniquely determined by the following two parameters:
A is “overlap index”. It is the product of the average number of emissions events
A
impinging on the receiver per second and mean duration of a typical interfering source emission, and A
[10 -2 , 1] in general.
A
A is the ratio
2
G
/
2 A
, where
2
G
is the intensity of the independent Gaussian component,
2 A is intensity of the impulsive non-Gaussian component, and
[10 -6 , 1] in general.
A
Middleton Class B Model
The Class B interference model [6] is analytically more complex since two characteristic functions are now needed to approximate the exact characteristic function. Hence we have two expressions for the envelope density, one for small and intermediate envelope values ( 0
B
) , the other for the larger values (
B
) , given as follows
(
)
B
I
2
ˆ
m
0
(
1 ) m m !
m
B
1 m
2
1
F
1
1
m
2
; 1 ;
ˆ 2 , ( 0
B
)
(
)
B
II
e
A
B
4 G
B
2 m
0
A
B
e
2 m !
2 m
/ 2
2 m
, (
B
) where ,
ˆ
N
2 G
B
I ;
ˆ
2
A
G
; G 2
B
1
4 ( 1
B
)
4
2
B
Hence the five parameters that uniquely identify the Class B interference are:
A
B
B
is impulsive index, where A
B
[10 -2 , 1] in general. is the ratio
2
G
/
2 B
, where
2
G
is the intensity of the independent Gaussian component,
B
2 B is intensity of the impulsive non-Gaussian component, and where
[10 -6 , 1] in general.
is spatial density propagation parameter equal to
n
such that n is the dimension of space of distribution of noise sources (1, 2, or 3),
-
5
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1 negative power law exponent for the emitting sources, and
is the non-negative power law exponent of their propagation, where
[0, 2] in general.
N
I
, where
[10 -1 , 1] in general.
is the scaling factor used in normalizing the process to the measured intensity of the process, where N
I
[10 -1 , 10 2 ] in general.
Middleton Class C Model
Since Class C interference is a sum of the Class A and Class B interference models, no specific derivations for Class C are required. Furthermore, Middleton proved in [6] that in Class C can be approximated to Class B models in most cases. Hence, we limit our discussion to Class A and Class B Middleton Models for the remainder of the report.
Symmetric Alpha Stable (S
S) Model
While Middleton Class A and Class B models [6] are known to accurately model RFI sources, their practical applications are limited due to the intractable form of their distributions. In particular, Class B interference model is difficult to use due to the existence of five parameters and also an empirically determined inflection point (
) [7].
B
Hence many authors have considered Symmetric Alpha Stable (S
S) model [10] as an approximation to Middleton Class B model. This approximation is particularly accurate for the case of narrowband reception without a Gaussian component, as well as the case of a symmetric pdf without a Gaussian component.
Symmetric Alpha Stable (S
S) models [10] are used to model the statistical properties of an “impulsive” signal. A random variable is said to have (S
S) distribution if its characteristic function is of the form,
(
)
e j
|
|
Hence the following three parameters uniquely identify a (S
S) distribution,
is t he characteristic exponent and is a measure of the ”thickness” of the tail of the distribution, where
[ 0 , 2 ] in general
0
is the localization parameter. It is the mean when
1 , where
(
,
) in general
1
2 and the median when,
is scale parameter or the dispersion and is similar to the variance of the Gaussian distribution, where
0 in general
6
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
III. Parameter Estimation
Version 1.1
Middleton Class A Model
Middleton proposes two estimators for the Class A model [6]. The first is based on empirical observations derived from the plot of envelope threshold ( E
0
) and the probability distribution, P(E > E
0
) , where E is the instantaneous envelope [7]. Although this method yields surprisingly accurate results, it is not practical since it is based on empirical observations. Also, it is affected by finite data record since we have an estimate of distributions based on the observed sample set.
The second method is based on the moments derived from the observed sample set [7].
Since the analytical expression for the characteristic equation for Class A interference model is known, we can derive the expression for all even-order moments (odd-order moments are zero) and relate the parameter to the moments generated. This yields the following result for the parameter estimates,
A
A
2 ( e
6
9 ( e
4
12 e
3
2
2 e
2
2
)
9 e
2
3 e
4
)
2
A
2 e
2
( e
6
3 ( e
4
12 e
3
2
2 e
2
2
9
)
3 e
2 e
4
)
1 where, e
2
, e
4 and e
6
are the second, fourth and sixth order moments of the envelope data respectively. The accuracy of the estimates is affected by finite data record and usually requires a large number of data samples (~10000). Furthermore, we observed that this estimator for
is highly dependent on the observation set and yielded poor estimates
A in many cases.
An efficient parameter estimation method for Class A model has been developed by
Zabin and Poor [9] based on the Expectation Maximization (EM) algorithm [8]. It is based on identifying that we can express the envelope probability density as a sum of weighted probability densities, under the constraint that the sum of the weights is equal to one. Let
( A
A
, K ) , where K
A
A
A denote the parameter set that has to be estimated. Envelope statistics can then be expressed as
(
)
j
1
j
( A
A
) h j
(
,
) where ,
j
( A
A
)
e
A
A
( j
A
A
(
1 j
1 )
)!
, s .
t .
j
1
j
( A
A
)
1 ; h j
(
,
)
2
j
A
1
K
K e
2
A
K j
1
K
7
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
The two-steps, the expectation step (E-Step) and the maximization step (M-Step), of the expectation maximization algorithm [8] is hence given as follows.
E-Step: Evaluate Q (
|
( p )
) , expected value of the log-likelihood function
M-Step: Determine
( p
1 ) to maximize Q (
|
( p )
)
The log-likelihood function Q (
|
( p )
) can then be expressed as follows [9],
Q (
|
( p )
)
i
N
0 j
1 a ij
A
A
( j
1 ) ln( A
A
)
ln( j
1 )!
i
N
0 j
1 a ij
ln( 2
i
)
ln
j
A
1
K
K
i
2
j
A
1
K
K
where, {
1
,
2
, ....,
N
} are the set of N observations of the envelope, and a ij
j
1
j
( A
A
) h j j
( A
A
) h j
(
i
(
i
,
( p )
)
,
( p )
)
The maximization step is then developed as a two-step iterative procedure [9], where we first maximize over A
A assuming that K is known and then vice-versa. The first minimization can be expressed as a polynomial of order 2 in A
A and the second minimization can be expressed as a polynomial of order 4 in K (after the linearizing approximation ( j
1
K )
( j
1 ) ). The two step Maximization step can therefore be solved efficiently as it reduces to finding roots to polynomial equations of order 2 and 4, respectively.
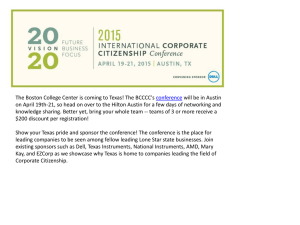
The performance of the EM Estimator developed by Zabin and Poor [9] for Class A
model has been shown in Figure 2 and Figure 3 for the estimation of parameter
A
A
. The estimates were calculated using N = 1000 envelope data samples which were generated synthetically based on the envelope distribution. Note that the envelope pdf is expressed as an infinite sum and only the first 11 terms were used in simulations. The results were averaged over 50 Monte-Carlo simulation runs.
8
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas x 10
-3 Fractional MSE of Estimator for A
2.6
2.4
A = 0.01
A = 0.1
A = 1
2.2
2
1.8
Version 1.1
1.6
1.4
1.2
1
0.8
1e-006 1e-005 0.0001
0.001
0.01
K
Figure 2: Fractional MSE in estimates of parameter A
A
using EM algorithm [9] for Class A model
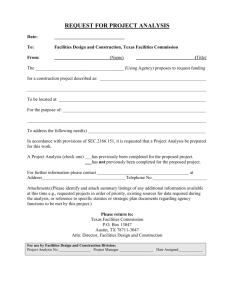
Number of Iterations taken by the EM Estimator for A
30
A = 0.01
A = 0.1
A = 1
25
20
15
10
1e-006 1e-005 0.0001
0.001
0.01
K
Figure 3: Number of iterations taken by the EM Estimator [9] for Class A Model
Symmetric Alpha Stable (S
S) Model
An efficient and computationally fast estimator was developed by Tsihrintzis and Nikias
[10]. It is based on the asymptotic behavior of the extreme order statistics. Following is a short summary of this concept.
9
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
Let X
1
, X
2
,...., X
N be a collection of independent realizations of a random variable with the probability density (pdf) f (.) and cumulative density (cdf) F (.) . Let X
M and X m be the maximum and the minimum in the sequence. Statistics of X
M and X m are refereed to as extreme-order statistics of the collection. For alpha-stable model, it can be shown
(using the theorem for Feasible Asymptotic Distribution for Extreme-Order Statistics
[10]), that the density of maxima and minima ( f and
M f m
) approach the Frechet distributions [10] as N
. Hence the estimators for the three-parameters of the alpha-stable interference models are derived as follows [10]:
Estimator for the localization parameter (
ˆ
): median ( X
1
, X
2
,..., X
N
)
Estimator for characteristic exponent (
):
First subtract the localization parameter from the observations and then segment the resulting “centered” data into L non-overlapping segments, each of length K = N/L .
X l
X
( l
1 ) K
1
ˆ
, X
( l
1 ) K
2
ˆ
, ...
, X lK
ˆ
,
for l
1 , 2 , ..., L
Consider the following standard deviations corresponding to the maximum and the minimum of the data segment: s
s
1
L l
L
1
ln(max( X l
))
X
2
,
1
L l
L
1
ln(min(
X l
))
X
2
,
X
X
1
L l
L
1 ln(max( X l
))
1
L l
L
1
ln(min(
X l
))
With these definitions, the estimator for the characteristic exponent is given as
ˆ
2
6
1 s
1 s
Estimator for the dispersion (
):
ˆ
1
N k
N
1
| X k
ˆ
C ( p ,
ˆ
)
| p
ˆ p
10
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas where,
( 0
p
C ( p ,
ˆ
)
cos(
1
2 p )
1
p
ˆ p
ˆ
) of fractional moment.
Version 1.1
, and p is an arbitrary choice for the order
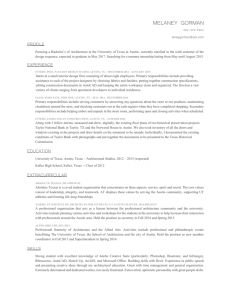
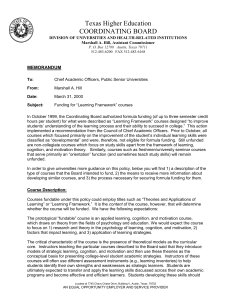
The performance of the extreme order statistics method by Tsihrintzis and Nikias [10] was observed for varying
5 (dispersion parameter),
10 (localization parameter) and by
(characteristic exponent) over its entire range, 0
2 . Estimates were calculated using N =10000 data samples generated synthetically based on the characteristic function of symmetric alpha stable model. The data was segmented into L
= 1250 sets for the estimator for the characteristic exponent
. Fractional lower order moments of 1 / 3 were used in the estimator for the dispersion parameter by choosing p
ˆ
/ 3 .The mean square error in the estimates for the characteristic exponent,
dispersion parameter and the localization parameter has been shown in Figure 4,
Figure 5 and Figure 6, respectively. The results were averaged over 100 Monte-Carlo
simulation runs.
MSE in estimates of the Characteristic Exponent (
)
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
0 0.2
0.4
0.6
0.8
1 1.2
1.4
1.6
1.8
2
Characteristic Exponent:
Figure 4: MSE in the estimates of the Characteristic Exponent for N = 10000 synthetic data samples, true parameters { δ = 10 (localization), γ = 5 (dispersion)}, L = 1250, p = α/3.
11
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
MSE in estimates of the Dispersion Parameter (
)
7
6
5
Version 1.1
4
3
2
1
0
0 0.2
0.4
0.6
0.8
1 1.2
1.4
1.6
1.8
2
Characteristic Exponent:
Figure 5: MSE in the estimates for the dispersion parameter for for N = 10000 synthetic data samples, true parameters {δ = 10 (localization), γ = 5 (dispersion)}, L = 1250, p = α/3.
6
5
4
3
8
7
9 x 10
-3
MSE in estimates of the Localization Parameter (
)
2
1
0
0 0.2
0.4
0.6
0.8
1 1.2
1.4
1.6
1.8
2
Characteristic Exponent:
Figure 6: MSE in the estimates for the localization parameter for N = 10000 synthetic data samples, true parameters {δ = 10 (localization), γ = 5 (dispersion)}, L = 1250, p = α/3.
12
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
IV. Filtering and Detection
The previous section deals with estimating the model parameters for Class A interference. Having constructed the noise model, we are ready to perform filtering and detection of signals corrupted by Class A noise. Although filtering and detection are similar concepts, there are differences in their application to noise mitigation. In general, the filtering problem can be summarized by passing the corrupted signal though a filter
(linear or non-linear) and then applying a signal detection procedure to obtain the transmitted signal. On the other hand, detection, usually called hard detection, tries to
deduce the transmitted signal without any additional preprocessing of the data. Figure 7
illustrates the main difference between the two approaches.
Figure 7: (a) Filtering, and (b) Detection
Class A interference is detrimental to performance due to its highly structured characteristic. As a result, the standard correlation receiver is sub-optimal since it is linear which is optimal only in the case of Gaussian interference and not in the case of
impulsive noise. Figure 8 illustrates the impact of Class A interference on a
communication system. It is noticed that as the value of A increases the performance of the correlator receiver approaches the Gaussian noise case. This is consistent with the fact that the pdf of Class A interference reduces to the Gaussian case as A goes to infinity.
This section starts by describing the Wiener filtering approach to radio frequency interference mitigation. After that, it provides an overview of Bayes detection formulation for coherent signal detection. The corresponding simulation results are included in the relevant sections.
13
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
Figure 8: Comparison of communication performance under Class A interference (
=10 -4 )
Wiener Filtering
Wiener, driven by important applications in communication theory, proposed to design a linear filter that would produce the optimum estimate of a signal from noisy measurements. This linear filter is optimum in the mean squared sense.
Our model can be represented by a desired signal d ( n ) corrupted by Class A noise z ( n ), to produce a corrupted signal x ( n ). This corrupted signal x ( n ) is filtered by the designed
Wiener filter w ( n ) to produce the best linear estimate of d ( n ). This setup is given in
The design criteria for Wiener filter is the minimization of mean squared error e ( n ). The mean squared error is given by the squared difference between the filtered value of the
corrupted signal d (n) and the desired signal d ( n ).
14
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
Figure 9: Simulation framework for the Wiener filter, where d(n) is the desired signal, z(n) is the corrupting noise, x(n) is the corrupted signal, w(n) is the designed Wiener filter coefficient vector,
and d (n) is the filtered signal
As a result, the Wiener filter design problem requires that we find the filter that minimizes
E
E d ( n )
d
( n )
2
. This is illustrated in Figure 10. Two types of
Wiener can be designed: The FIR Wiener Filter and the general IIR Wiener Filter. FIR filters are usually preferred in practice due to their guaranteed stability and their resilience to signal quantization effects. Subsequently, we utilize an FIR Wiener filter design in the following simulations.
Figure 10: Design framework for the Wiener filter, where d(n) is the desired signal, z(n) is the corrupting noise, x(n) is the corrupted signal, w(n) is the designed Wiener filter coefficient vector,
and d (n) is the filtered signal
FIR Wiener Formulation
A ( p-1 ) st-order FIR filter is given in z -domain by W
n
1 p
0 w ( n ) z
n x ( n ) passes through this filter, the filtered output is given by d
( n )
. As a result, when l
1 p
0 w ( l ) x ( n
l ) . Using the orthogonality principle, it seen that the minimization of mean squared error is equivalent to setting E
e ( n ) x
*
( n
k )
0 ; k
0 , 1 , , p
1 . Substituting the value of e ( n )
as a function of d ( n ) and d (n) , we obtain the famous Wiener-Hopf equations under the assumption that x ( n ) and d ( n ) are jointly wide sense stationary (WSS) given [1] by l p
1
0 w ( l ) r x
( k
l )
r dx
( k ) ; k
0 , 1 , , p
1 where r x and r dx are the autocorrelation of x and the cross correlation of x and d . This equation can also be written in a matrix form in the following manner:
15
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
r x r x r x
r x r x
*
p
1
p
2
...
...
r x
*
p
1
r x
w ( w ( 0 ) w ( 1 ) p
1 )
r dx r dx r dx
(
p
( 0 )
( 1
)
1 )
Version 1.1
IIR Wiener Formulation
For the IIR Wiener filter case, the solution is derived from the same principles as for the
FIR filter. However, there is no restriction on the structure of the filter. The solution to this general IIR Wiener filter is given by: where the
( e j
)
H
MMSE
dx x
(
( e e j
j
)
)
d
( e
j
d
)
( e
j
is the power spectrum of a given signal. z
)
( e j
)
Simulation Results
The following figure provides an illustration of the application of Wiener filtering to a raised cosine pulse. It is noticed that Class A interference is impulsive. The Wiener filter output is smoothed. The communication performance of this filter is provided in the next section.
Figure 11: (a) raised cosine pulse, (b) corrupted by Class A interference, and (c) filtered with a
100-tap Wiener filter
16
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Coherent Detection
Version 1.1
The alternate approach to filtering is Bayes detection. In this model, no preprocessing is done on the corrupted signal x ( n ), and the receiver decides directly on the desired signal d ( n ). Bayesian approach produces the optimal detection rule by maximizing the probability of receiving a given corrupted signal x ( n ) given the sent hypothesis. This approach requires the pdf of the noise samples which is available in this case. This dependency on the pdf can increase the complexity of the receiver since it is not restricted to being just a linear filter as in the Wiener case.
Spaulding and Middleton in [2] computed the optimal Bayesian detection rule and derived various theoretical bounds that quantify the performance of their designed detector. In this section, we summarize their approach. Simulation results are presented in the following sections.
In their derivations, Spaulding and Middleton [2] deal mainly with binary digital reception particularly antipodal signaling, orthogonal signaling, and ON-OFF key signaling. As a result their received signal vector X can be modeled as:
H
1
: X
S
1
Z
H
2
: X
S
2
Z where S j
for j=1,2 represents the sent signal, and Z a vector of independent Class A interference samples. The optimal Bayesian detection rule for a binary hypothesis case is given by
( X )
p p
(
(
H
H
2
1
)
) p p
(
(
X
X
|
|
H
H
2
)
1
)
H
1
1
H
2
. Generally, the hypotheses are equally likely so the decision rule reduces to
( X )
p p
(
(
X
X
|
|
H
2
)
H
1
)
H
1
H
2
1 . Now given H j
, Z=X-S j
. As a result, p ( X |H j
)= p z
( X S j
). This implies that the optimal decision rule becomes
( X )
p p
Z
Z
(
(
X
X
S
S
2
1
)
)
H
1
H
2
1 . Observing from the previous section we notice that the pdf of
Class A interference vector Z is given by p
Z
( z )
N
n
1 m
0 e
A m !
A m
2
m
2 e
2
/ 2
2 m ;
m
2 m
A
1
'
'
This follows from the independence of the noise samples and the memoryless channel assumption and N is the number of samples. Substituting the above equations into the equation for the optimal detector we obtain that the optimal detector is given by:
17
H
1
H
2
1
Version 1.1 Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas n
N
1 m
0 e
A m !
( X )
N
n
1
m
0 e
A m !
A m
2
2 m e
x n
s
2 n
2
/ 2
2 m
A m
2
m
2 e
x n
s
1 n
2
/ 2
2 m
This optimal rule is in the form of an infinite series that is impractical to implement. As a result, various approximations need to be derived to facilitate the evaluation of the optimal detection rule. Spaulding and Middleton [2] approach this problem by taking small signal approximation of the decision rule. By taking the Taylor series expansion of the Class A interference pdf and retaining the first order terms of the derivative,
Spaulding and Middleton we able to obtain the a simplified expression for the required pdf. This is illustrated in the following steps. The Taylor expansion of the required pdf is given by p
Z
( X
S j
)
p
Z
( X )
p
Z
( X )
S j
p
Z
( X )
N i
1
p
Z
( x i
X ) s ji
Substituting that equation into the optimal rule and dividing the numerator and denominator by p z
( X ), we get that the optimal decision rule [2] reduces to
( X )
1
i
N
1 s
2 i
1
i
N
1 s
1 i d dx i d dx i ln ln p
Z
( x i
) p
Z
( x i
)
H
1
H
2
1 or
The interesting part about this formula is that it has a similar form to the standard correlation receiver for Gaussian noise with the exception of the non-linearity d ln p
Z
( x i
) that precedes it. dx i
After that Spaulding and Middleton [2] proceed to derive various bounds on the error performance and compare it to the performance of the optimal correlation receiver for
Gaussian noise. Their plots show significant (at least about 25 dB for a bit error rate of
10
−5
) improvement in communication performance over the correlation receiver. Figure
12 provides simulated results for a raised cosine pulse (10 samples per symbol period,
10 symbols period per symbol) corrupted by Class A interference ( A=0.35,
=0.5*10 -3 ) sent through a memoryless channel (no ISI). It is seen from the graph that the Wiener filter does not offer much additional improvement over the correlation receiver. This is not surprising since the Wiener filter is a linear method that is sub-optimal for non-
Gaussian noise. The improvement in communication performance by using the Bayes detection rule is approximately 25 dB for a bit error rate of 10 -3 .
18
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
Figure 12: Communication performance for various detection methods for Class A interference with overlap index (A) of 0.35, and Gaussian factor (
) of 0.5*10 -3 for a memoryless channel (no
ISI) and a raised cosine pulse shape (10 samples per symbol period and 10 symbol periods per symbol, ie. 100 samples in total)
Truncation Analysis and Small Signal Approximation of the Bayesian
Detection
It is noticed that the Bayesian detection method consists of an infinite series of summations. In order to be able to implement it practically, one has to truncate each of the used series. It is expected that the performance of the Bayesian detector deteriorates as we retain less terms of the truncated series. This performance
complexity tradeoff is quantified in Figure 13:. It is noticed from the figure that there is
virtually no difference between the performances of the system when either 10 terms or
100 terms of the series are retained. An interesting observation is that even when we retain only two terms of the series, the performance is significantly better than the correlation receiver.
19
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
Figure 13: Comparison of the Bayes detection as a function of the retained number of terms in the series expansion of the Class A pdf.
Linearization (small signal approximation) or locally optimal Bayesian rule is obtained by taking the Taylor series expansion of the Class A pdf, which was done in the previous section, and substituting it in the Bayesian decision rule to obtain a new decision rule. It is noticed that its implementation is much simpler than the actual Bayesian rule. This is due to the fact that it is a dot-product operation with N-length vectors, where the computationally demanding term (the one containing the pdf function of the Class A interference) is computed only once for a given X and then just multiplied by the sent signal for each user. This should be contrasted to the Bayesian detector where for each
user the pdf has to be calculated which adds tremendous complexity. Figure 14:
detectors and filters considered in this work, and how they compare to the locally optimal Bayesian detection (LOBD) (small signal approximation). It is seen that the
LOBD performance is much better than the correlation receiver and Wiener filter, however, as expected, it is outperformed by the Bayesian detection rule.
20
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
Figure 14: Comparison of the small signal approximation performance to the performance of the other detection methods in terms of bit error rate vs. SNR.
V. Results on Measured Data
Measurements of radio frequency interference (RFI) on a computation platform were obtained from Intel Corporation.
Measurement data was collected using a 20GSPS scope which represented actual radiated data. Four sets of measurement data were recorded in presumably different configuration of the computation platform (i.e. different subsystems active etc). Each set of measurement comprised of 80000 samples of data.
T he noise was assumed to be “broadband”, i.e. noise bandwidth was greater than the receiver bandwidth, and the radio was used to listen to the platform noise only (no data communication was being carried out). No further information was provided.
Since the noise spectrum is wider than the receiver bandwidth, the interference could be modeled as Middleton Class B model [6]. Furthermore, we observed that the PDF of the measurements was symmetric. Hence symmetric alpha stable model [10] was chosen as an approximation to the
Middleton Class B model for parameter estimation [6]. The data was thus assumed to follow the symmetric alpha stable model and parameter estimation was carried out using the extreme order statistics method developed by Tsihrintzis and Nikias [11].
21
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
Ошибка! Источник ссылки не найден.
lists the estimated parameters for the
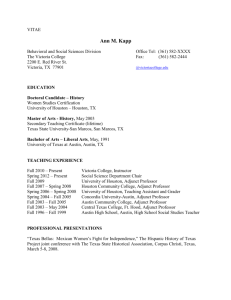
symmetric alpha stable model for all the four measurement data sets. Figure 15
compares the probability density function of the measured data (obtained via the ksdensity function in MATLAB) and the estimated PDF based on the parameters of the symmetric alpha stable model for measurement data set #1. The figure shows a good match between the measured and estimated probability density function. The mean squared error between the measured and estimated PDF, normalized by the energy of the measured PDF, have been listed in
Ошибка! Источник ссылки не найден.
.
Characteristic
Exponent
Dispersion
Parameter
Localization
Parameter
Normalized
MSE
Measurement Set #1
Measurement Set #2 1.4364
Measurement Set #3
Measurement Set #4
1.5525
1.4354
1.4423
0.5833
0.5614
0.5000
0.4953
-0.0393
-0.0314
0.0399
-0.0387
0.0055
0.0130
0.0078
0.0074
Table 2: Estimated Parameters of the symmetric alpha stable model for measured data
4.5
x 10
-3 PDF of measured data against estimated alpha-stable model
4
3.5
Measured PDF
Estimated PDF using alpha stable modeling
3
2.5
2
1.5
1
0.5
0
-50 -40 -30 -20 -10 0 10 20 30 40 50
Noise Amplitude
Figure 15: PDF of measured data compared with PDF of estimated symmetric alpha stable model for measurement set 1, α = 1.5525, γ = 0.5833, δ = -0.0393
22
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
The results are highly promising since they validate both the parameter estimation method used and the assumption that the measured data can be modeled as a symmetric alpha stable model in this case.
Inference on the actual physical variation in the computation platform for the different measurement datasets can be made based on the estimated parameters of the assumed symmetric alpha stable model. For example, the characteristic exponent and the dispersion parameter estimated for measurement set #1 is greater than that obtained for measurement set #2
(
Ошибка! Источник ссылки не найден.
). This indicates that the physical conditions for measurement set 1 are relatively less impulsive that those for measurement set #2.
This could happen if the number of subsystems active on the computation system for measurement set #2 is less than those for measurement set #1. Further deductions can also be made, but they require the knowledge of the potential interference sources that could be active and there relative intensities and duration of interference.
VI. Conclusion and Future Work
Radio frequency interference generated by the computational platform affects wireless communication subsystems implemented on the same computational platform. This interference is non-Gaussian in nature. Middleton models provide a canonical model that is able to model this type of noise accurately. This enables us to perform Wiener filtering and optimal detection, resulting in a better communication performance than the standard correlation receiver. The improved communication performance results in higher bit rates and lower bit errors.
The following points include future work (offline methods) to be done for this project:
• Estimator for single symmetric alpha-stable process plus Gaussian
•
Estimator for mixture of alpha stable processes plus Gaussian (requires blind source separation for 1-D time series)
• Estimator for Middleton Class B parameters
• Quantify communication performance vs. complexity tradeoffs for Middleton
Class A detection
• Exploring the application of particle filtering to noise mitigation
The ultimate goal of this project is to develop online methods that include fixed-point
(embedded) methods for parameter estimation of Middleton Noise models, mixtures of alpha-stable processes and embedded implementations of detection methods and noise cancellation.
23
Embedded Signal Processing Laboratory
The University of Texas at Austin, Austin, Texas
Version 1.1
VII. REFERENCES
[1] M. H. Hayes, Statistical Digital Signal Processing and Modeling . Wiley, 1996.
[2] A. Spaulding and D. Middleton, “Optimum reception in an impulsive interference enviroment-part I : Coherent detection,” IEEE Transactions on Communications , vol.
25, no. 9, pp. 910
–923, 1977.
[3] P. Havarasan, M. Haines, H. Skinner, and F. Justice, “Current and future EMI challenges at Intel and how to manage them ”, Proc. IEEE International Symposium on Electromagnetic Compatibility, vol. 1, pp. 281
–283, Aug. 2000.
[4]
E. A. Morse, “A method for EMI evaluation of notebook computer liquid crystal display panels while eliminating the contribution of computer generated EM I,” Proc.
IEEE International Symposium on Electromagnetic Compatibility , pp. 343
–346, Aug.
1995.
[5] T. M. Zeeff, T. H. Hubing, J. L. Drewniak, R. E. Dussroff, and T. P. Van Doren, “EMC analysis of an 18" LCD monitor”, Proc. IEEE International Symposium on
Electromagnetic Compatibility, vol. 1, pp. 169-173, Aug. 2000 .
[6]
D. Middleton, “Non-Gaussian noise models in signal processing for telecommunications: New methods and results for Class A and Class B noise models”,
IEEE Transactions on Information Theory , vol. 45, no. 4, pp. 1129-1149,
May 1999.
[7] D. Middleton, “Procedures for determining the properties of the first-order canonical models of Class A and Class B electromagnetic interference”,
IEEE Transactions on
Electromagnetic Compatibility , vol. 21, pp. 190-208, Aug. 1979.
[8] J. Bilmes, "A Gentle Tutorial of the EM [Expectation-Maximization] algorithm and its application to parameter estimation for Gaussian mixture and hidden Markov models," Manuscript, International Computer Science Institute , 1998.
[9] S. M. Zabin and
H. V. Poor, “Efficient estimation of Class A noise parameters via the
EM [ExpectationMaximization] algorithms”, IEEE Transaction on Information Theory , vol. 37, no. 1, pp. 60-72, Jan. 1991.
[10] G. A. Tsihrintzis and C. L. Nikias, "Fast estimation of the parameters of alphastable impulsive interference", IEEE Transactions on Signal Processing , vol. 44, no
6, pp. 1492-1503, June 1996.
24