Real-Time Image Processing Requirements
advertisement

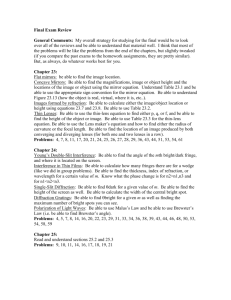
Real-Time Image Processing Requirements For the Synoptic K-corona Imager (SKI) This document introduces the SKI coronagraph and some of the image processing requirements for the instrument. Introduction: A coronagraph images the solar corona. Even at the best sites in the world, the sky (scattering in the Earth's atmosphere) is many orders of magnitude brighter than the corona. The reason a corona is easily visible during a solar eclipse is the Moon blocks sunlight from striking the Earth’s atmosphere above the observing site. A coronagraph typically forms an image of the Sun and the surrounding sky using a simple lens. At the focus of the lens the bright light of the solar disk is diverted or absorbed by an ‘occulting disk’ which just barely covers the solar disk, making an artificial eclipse. Although the occulting disk blocks the disk light, the Earth’s atmosphere is still fully illuminated by the Sun and therefore the bright sky must be suppressed in some other way. This is possible because the light from the corona is polarized. A bright ring around the occulter is common. Blue: bright sky background Blue: bright sky background n d An occulting disk blocks the direct sunlight Grey: faint coronal light background Bright wandering aerosol n d Figure 1: A cartoon of a coronagraph image. The black disk is the occulter blocking the disk of the Sun. A bright ring is often seen just above the occulter (due to diffraction and other effects). The corona (shown in grey) is ~10-4 of the brightness of the sky background (blue). Bright aerosols (dust, bugs, etc.) will often enter the field of view. These should be removed in real-time processing. At the edge of the SKI field of view, the sky is ~104 times brighter than the corona. Imaging the corona therefore requires separating its faint (but polarized) light from this huge background (the sky is also polarized, but this can be modeled and subtracted). To do this the light passing around the occulting disk is sent through polarization optics. These optics separate the light into two beams and each beam is refocused onto a camera. The polarizing elements are electrooptical and the light passing through them is ‘modulated’ at very high speeds (equal to the camera frame rate). This modulation is required to determine the polarization of the light. In SKI there are a total of 4 modulation ‘states’. The image processing system must read each of the cameras and process the images produced in each of these four states separately (there are therefore a total of eight frames to process: 2 cameras x 4 states). To see a signal which is 10-4 of the sky brightness the sky must be measured with enough photons such that the shot noise is suppressed to this level or better. Since shot noise goes like the square root of the signal, at least 108 photons must be read by the cameras. Modern CMOS cameras of the size required to image the field (~1k square) have well depths on the order of 60ke-. To accommodate bright objects in the field the CMOS camera should have a nominal 20% exposure, filling each well to ~10ke-. At this exposure, 10,000 frames must be read to have enough photons to see the coronal signal. A 1k x 1k camera running at 500fps (near the limit of a Camera Link interface) will acquire this number of images in 20 seconds. This is also the time cadence which is required to capture the evolution of flares and other quickly-evolving solar events. This number of photons is easy captured with a ~20cm telescope. The problems are the cameras and the real-time processing requirements. For the system to work, each camera image must be shot-noise limited. At 10ke- per read, this requires a read noise significantly below 100e-. For the digitization noise to be less than the shot noise at least 10 bits are required with 12+ being desirable. Polarimetry also requires that the camera operate in a ‘global shutter’ mode. All of these requirements seem reasonable with modern CMOS cameras. Of important note is that we do not need to store images at 1000fps. For scientific and diagnostic needs, the processed images only need to be written to disk every 250ms or so (a complete set of eight polarimetric images stored every 2 seconds). Because the Sun will be observed for ~8 hours continuously, the processing of the 1000fps data into 4fps stored imagery must be done in real time. In principle the processing system would only need to sum the images of each state into buffers. In practice there is additional processing which we would like to do in real time: the removal of bright aerosols. Aerosol Removal: Aerosols are particles floating in the air. Insects, pollen, and airborne seeds all scatter light very strongly. When they pass in front of the telescope’s aperture these appear as bright, fuzzy blobs which wander across the field of view (see Figure 1) in times scales of ~1 second (depending on wind, etc.) If the individual images are simply averaged, these show up as bright streaks in the data. The optimal solution is to remove these bright objects from each image before they are accumulated into their state buffers. As an example, consider the following algorithm: An independent video processor & computer is used for each camera. Each camera runs at 500fps where the polarization modulation state is changes after each read (so the read sequence is state 1, 2, 3, 4, 1, 2, 3, 4, etc.) Each modulation state requires 3 buffers: a sum frame, running mean frame and a ‘good read’ frame. The sum frame stores the image and is initialized to zero each time it is dumped to disk. Before a read is added to the sum buffer, each pixel is compared with a few second long running mean, stored in the running mean frame. If a pixel read is ‘high’ compared with the running mean, it is tagged as containing an aerosol and set to zero. A ‘good read’ frame counts how many good reads are recorded for each pixel. Before writing to disk, the sum buffer is divided by the good read frame to make an average image (after which the good read frame is re-initialized). The running mean frame is updated with the processed image. The algorithm requires an initialization of the running mean frame before filtering can be started. There are many possible algorithms for aerosol removal. For example, the running mean could be replaced by a reference image taken at intervals over the day. If it is computationally too intensive to remove aerosols on a read-by-read basis the problem can be scaled down to a level where the removal is possible. For example, two sequential reads (in the same state) can be simply added then the above algorithm performed. If this is still too intensive then three frames could be summed before aerosol removal (and so on).