Teleoperated Nano Scale Object Manipulation

Teleoperated Nano Scale Object Manipulation
Ioan Burda
*)
, Mihaita Horodinca
Universite Libre de Bruxelles, Av. Roosevelt 50, 1050 Bruxelles, C.P. 165/42, Belgium
Within the past decade, a family of powerful surface imaging techniques, known collectively as
Scanned Probe Microscopy (SPM), has developed in the wake of the invention of the Scanning
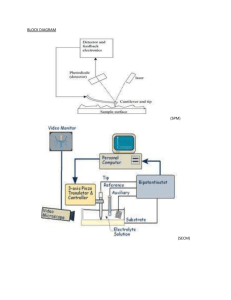
Tunneling Microscope (STM). In the first approximation, an SPM (Fig. 1) is a 3 degree-of-freedom
(3DOF) robot. It can move in x , y , and z , which is the analog of a macrorobotic hand. The vertical displacement is controlled very accurately by a feedback loop involving tunneling current or force (or other quantities for less-common SPMs).
The SPM tip is the primary end effector in nanomanipulation.
A plain, sharp tip seems to be adequate for most pushing operations. In some cases it may also suffice for picking and depositing objects, especially in conjunction with electrostatic forces generated by applying a suitable bias to the tip. This requires both a conducting tip and a conducting substrate. A top-down technique that is closely related to nanomanipulation involves removing or depositing small amounts of material by using an SPM.
An important area of nanorobotics research involves manipulation of nanoscale objects with macroscopic instruments. Experimental work has been focused on this area, especially through the use of SPMs as robots. In
Fig. 1. Nanomanipulator Smena - A macrorobotics the physical processes involved are mechanical and relatively well understood. At the nanoscale, the processes are chemical and physical, and still an area of active research. In addition, nanomanipulation takes place in several different environments, such as liquids, air or ultra high vacuum (UHV). The environment has a strong influence on the physics and chemistry of the processes. Nanomanipulation is not restricted to mechanical interactions. Nanorobotics manipulation with SPMs is a promising field that can lead to revolutionary new science and technology.
In our laboratory a SPM (Fig. 1) is used as nanomanipulator; the tasks of manipulation are controlled via MATLAB environment, for which a real-time Toolbox has been developed. In addition to being user friendly and widely available, this interface allows web telemanipulation. A 3 DOF
Haptic device (with voice-coil actuators, Fig. 2) is also under development. It is controlled via the real-
Fig. 2. A 3DOF Haptic Device time MATLAB Toolbox plus high performance microcontrollers and digitally assisted analog-loop.
This haptic device is designed with nanomanipulation applications in mind, to allow the operator to feel the interaction forces at the nanoscale and atomic level. Our goal is to use the user-friendly
MATLAB programming environment, which is well known in engineering academia, for nanomanipulation, image processing and virtual reality.
*) mailto:ioan_burda@yahoo.com