ISS-Accel-060913_rev061120
advertisement

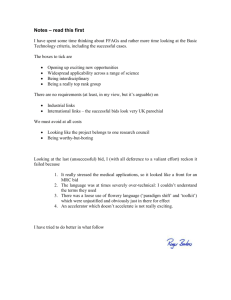
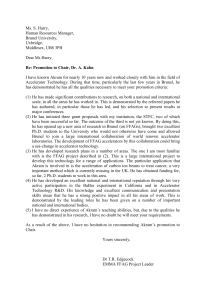
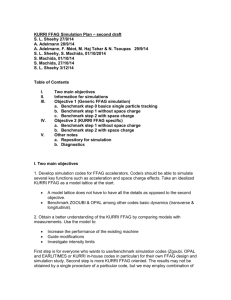
Acceleration The goal of the acceleration systems is to accelerate a beam from a kinetic energy of around 138 MeV (the average kinetic energy in the cooling section) to some final energy. That final kinetic energy is somewhere in the range of 20 to 50 GeV. The layout described here will accelerate to 25 GeV, with an option of doubling that final energy to 50 GeV. The design of the acceleration systems is based on reducing the cost of the acceleration systems, taking into account a cost associated with decays and other losses. The design attempts to minimize transverse and longitudinal emittance growth in the system as well. The design choices are driven by the fact that the muons are decaying, and thus must be accelerated as rapidly as reasonably possible, and that the beam sizes, both transverse and longitudinal, are very large. For these studies, the transverse normalized acceptance is chosen to be 30 mm-rad, and the longitudinal normalized acceptance is 150 mm-rad. The transverse normalized acceptance is defined to be a 2 p mc , where a is the maximum half-size of the beam at a given location, is the Courant-Snyder beta function at that point, p is the total momentum, m is the muon mass, and c is the speed of light. The longitudinal normalized acceptance is defined for an upright ellipse to be tE mc , where t is the maximum half-width in time of the beam, and E is the maximum halfwidth in energy of the beam. The types of subsystems and their sequence are similar to what was proposed in [1]. However, significant changes in the details have occurred, in particular the energies for the transitions between the subsystems. The reasons behind these changes will be described here. Overall Scenario The acceleration systems consist of several different types of subsystems. The choice of where to use which type of subsystem will be governed by beam dynamics and cost considerations. A detailed cost optimization has not been performed at this point, and many of the beam dynamics issues are still being studied. Thus, the scenario chosen here is based on initial estimates of machine performance and on past experience with the cost behavior of these systems. High average gradients are necessary to keep the amount of muon decay under control. Superconducting cavities are used to keep the RF power required to achieve these high gradients modest. Since the RF systems (cavities, their cryostats, RF power systems, and the associated cryogenic systems) tend to be the most expensive component of the acceleration systems, and since RF cavities generally operate most economically at or near their highest achievable gradient, minimizing cost generally involves minimizing the number of RF cavities in the acceleration system. To reduce the number of RF cavities, one must make multiple passes through the RF cavities. Thus, the choice of what subsystem to use where will be based primarily on the number of passes each subsystem is able to make through the cavities. Figure 0 shows a picture of the entire acceleration system. The following subsections will explain the different types of subsystems, why they were chosen, and the reasons behind the energy transition points. 1.2–3.2 GeV RLA Linac to 1.2 GeV 12.5–25 GeV FFAG 3.2–12.5 GeV RLA 25–50 GeV FFAG Figure 1: Layout of the entire acceleration system. Recirculating Linear Accelerators Recirculating linear accelerators (RLAs) are machines that take one or more linacs and connect them by a series of arcs. After each pass though the linac, the beam will enter a different arc, which will transport the beam to the next linac or the next pass through the same linac. The switchyard, where the beam from the linac is transported into each individual arc, guides the beam into individual arcs by use of fixed field magnets based on the energy of the beam. Because of the nonzero energy spread in the beam, the nonzero transverse beam size, the space required for magnet coils, and other considerations, the number of separate arcs the beam can be separated into is limited to around 4 or 5. This limits the number of passes through the cavities that an RLA can expect to achieve. One way to increase the efficiency of an RLA is to change its geometry. Figure 0 shows two different layouts: a racetrack layout and a dogbone layout. The racetrack layout is in principle more straightforward to design and build: the arcs bend in only one direction, Figure 2: RLA geometries: dogbone layout (above), racetrack layout (below). and one need not introduce vertical bending to avoid beamline crossings that occur when one tries to minimize arc length. The dogbone geometry, on the other hand, is in principle more efficient [2]. In particular, since the energy separation at the switchyard effectively limits the number of passes one can make through the linac, the dogbone layout allows one to make twice as many passes through the linac and the racetrack layout, and is thus the preferred layout. The baseline design has two dogbone RLAs. As discussed below, we choose the maximum RLA energy to be 12.5 GeV. It is desirable, as discussed in the next subsection, to lower the injection energy to the first RLA as much as is practical. Making two RLAs allows one to lower the first injection energy further than if one had only one RLA. Furthermore, it potentially increases the amount of synchrotron oscillation in the RLAs, reducing the effects of the time of flight dependence on transverse amplitude in the RLA linacs (see below) and differential beam loading down the bunch train. Pre-Acceleration Linac For several reasons, one should not use an RLA to accelerate from the lowest energies. At lower energies, the beam sizes and relative energy spreads are larger, meaning that injection into the RLA becomes more challenging. The switchyards become more challenging for the same reasons. The variation of the velocity with energy means that if the phase relationship between cavities in the RLA linac is correct for the final linac pass, it is incorrect for the initial pass; this effect becomes worse at low energies. Thus, we begin acceleration with a linac which will accelerate to a point where the aforementioned effects can be handled in the RLA. There are disadvantages to a linac. The primary one is cost: one cannot make multiple passes through the RF cavities. In addition, the time of flight variation with transverse amplitude (see below) causes particles with large transverse amplitudes to fall behind in RF phase. These considerations taken together have led to choosing the final energy of the preaccelerator linac to be 1.2 GeV. While a detailed parameter survey has not been completed, this energy is an estimate of the lowest energy that will keep the phase slip tolerable due to the velocity difference between the first and last linac passes. Fixed Field Alternating Gradient Accelerators (FFAGs) If one could construct an RLA which didn’t have the limitations caused by the switchyard, one could in principle make even more passes through the cavities during an acceleration cycle. To avoid the switchyard, one must have a single arc for all beam energies. This is what is known as a fixed field alternating gradient accelerator (FFAG). All FFAGs consist of a sequence of simple, identical cells with RF cavities in most of the cells. The design of the cell determines the type of the FFAG and the method by which beams must be accelerated. For this study, three types of FFAGs were considered. Scaling FFAGs Scaling FFAGs are the original type of FFAG that was first described and built in the 1950s [3][4][5]. A design study for a neutrino factory which solely used FFAGs for muon acceleration was completed in 2001 [6]. We have chosen not to use scaling designs for the baseline for this study for two reasons. The first is that scaling FFAGs require the use of relatively low frequency RF cavities in order to accelerate muons, of the order of 15 MHz (an exception to this will be discussed later). This is due to the relatively large time of flight variation with energy in these machines. This would require the earlier capture systems to use the same lower RF frequency, and as mentioned earlier, this significantly decreases the capture efficiency of the machine. Furthermore, achieving high gradients required for muon acceleration at these lower frequencies is very challenging, especially considering the large peak power that would be required at these frequencies. The second reason for not using scaling FFAGs is the relatively large aperture required in high field superconducting magnets. This leads to an overall acceleration system which is expensive compared to alternatives, including the use of RLAs to the highest energies. Both of these reasons are related to one another, and arise because of the large dispersion in these machines. It can be shown [7] that to minimize dispersion, bends should be located at the regions of lowest horizontal beta function, meaning that most bending should occur in horizontally defocusing magnets. Scaling FFAGs with a positive field index, however, have most of their bending occurring in the horizontally focusing magnets. One could remedy this by making a scaling FFAG with a negative field index with a large magnitude. No complete design with a correct field model of such a machine has thus far been presented, although there is no known proof that it is impossible to do so. Such a machine may have dynamic aperture problems, however, since to make the tune independent of energy (which is characteristic of scaling FFAGs), large nonlinearities would be required since the dispersion is small. Linear Non-Scaling FFAGs Time-of-Flight Deviation per Cell (ps) 5 Linear non-scaling FFAGs [8][9] attempt 4 to address the two-fold difficulty of scaling FFAGs (large aperture and large 3 time of flight variation with energy) by 2 addressing the underlying reason for these 1 problems: in a linear non-scaling FFAG, 0 most of the bending is placed in the 10 12 14 16 18 20 -1 defocusing magnets. As a result, for an Total Energy (GeV) T equivalent energy range, magnet apertures -2 can be reduced compared with a scaling -3 FFAG. Furthermore, at least for high energies, the ring can be made isochronous Figure 3: Time of flight as a function of energy in a at a single energy within the energy range linear non-scaling FFAG cell. of the machine. This is shown in Fig. 0, which gives the time of flight as a function of energy in an example of a linear non-scaling FFAG. Note that time of flight is not completely independent of energy. Nonetheless, the relatively small time of flight variation with energy in these machines allows one to use relatively high frequency RF to accelerate, namely the 200 MHz RF that is used in the bunching, phase rotation, and cooling channels. This allows for reasonably high accelerating gradients, and is compatible with the RF systems for the previously described capture, phase rotation, and cooling systems. 0 Energy These linear non-scaling FFAGs become more efficient at higher energies [10]. One is able to make more passes through the cavities at higher energies. The cost per GeV of acceleration is also reduced significantly at higher energies. As a result, one tends to use FFAGs only at the higher energies, where they become more efficient than RLAs. It appears that a factor of 2 is nearly the optimal acceleration range for an FFAG stage. The aperture requirements and time of flight range increase very rapidly as the energy range increases beyond that. Since the tune depends on energy, the lattice tends to become linearly unstable if one tries to increase the energy range significantly beyond this. The primary difficulty with linear nonscaling FFAGs is that the time of flight depends on transverse amplitude [11]. The theoretical foundation and methods for addressing this will be discussed in more detail below. Figure 0 shows how the time of flight depends on the transverse amplitude in a linear nonscaling FFAG. This means that particles with different transverse amplitudes are guided through different regions of longitudinal phase space as shown in Fig. 0. Examining that figure, there is Figure 4: Time of flight as a function of energy for zero transverse amplitude (solid) and 30 mm (dashed) only a limited region of initial phase for normalized transverse amplitude (twice the transverse which particles with both low and high action, normalized). amplitudes will be accelerated. Once particles reach the final energy, low and high amplitude particles will have different phases, since the particles follow trajectories which are roughly parallel to the separatrices. In particular, large amplitude particles will be at a later RF phase than low amplitude particles. Since the phase space diagram looks similar to Fig. 0 for each FFAG stage, this will be problematic when one passes from one stage to the next, since the figure shows that large amplitude particles should arrive earlier, not later, than low amplitude particles for optimal transmission. Despite this shortcoming, linear nonscaling FFAGs seem to be the best option for accelerating to the highest energies. We should, however, implement some improvements (described below) to earlier designs that help to address the time of flight dependence on transverse amplitude. -p/2 0 -p/4 p/4 p/2 RF Phase The likelihood that these improvements will increase the cost and reduce the Figure 5: Phase space channel for low amplitude efficiency of the FFAG stages has particles (black) and high amplitude particles (light motivated us to eliminate the 5–10 GeV grey). The overlap region is dark grey. Particles FFAG stage that was present in the start at low energy (bottom) and accelerated to high energy (top). Study IIa design (which would be a 6.25–12.5 GeV stage in this scenario), and instead use an RLA to accelerate to 12.5 GeV. Further motivation for this change is the desire to potentially accelerate to 50 GeV, which would require a subsequent FFAG stage. Preliminary simulations [12] have indicated that two FFAG stages should result in a tolerable level of longitudinal emittance dilution, but we are more concerned about three stages. Isochronous Non-Scaling FFAGs If one ignores the dependence of the time of flight on transverse amplitude, the primary factor that controls the number of passes that can be made in an FFAG is the variation of the time of flight with energy. If the time of flight is independent of energy, one can in principle make an arbitrary number of passes through the FFAG. Of course, this may not be desirable due to decays, but one could make the maximum number of passes that were desirable. An 8–20 GeV FFAG was designed which was significantly more isochronous than a similar linear non-scaling FFAG would be [13][14]. To accomplish this, it required magnets that were highly nonlinear [15]. The resulting dynamic aperture was insufficient to accelerate the neutrino factory muon beam [15][16]. The lattice seemed to be very sensitive to the precise shape of the magnet end fields; this likely arose due to the high degree of nonlinearity in the lattice. Finally, the rapid field variations required could potentially create difficulties in constructing the magnets. Previous attempts to construct a non-scaling FFAG lattice with highly nonlinear magnets have also had insufficient dynamic aperture for accelerating muons in a neutrino factory [17][18]. Therefore, isochronous non-scaling FFAG lattices were ruled out at this point for accelerating muons. Time of Flight Dependence on Transverse Amplitude It is essential that particles arrive at the appropriate phase of the RF for them to be accelerated and to maintain the appropriate shape of the longitudinal distribution. Usually, the machine can be designed assuming that the transverse amplitude has a negligible effect on the longitudinal motion. Unfortunately, this approximation cannot be made for the acceleration of muons due to their large transverse amplitudes. The underlying reason for this is shown in Fig. 0: particles with larger transverse amplitudes have geometrically longer paths lengths due to the nonzero angles they make with respect to the reference orbit. As shown in [19], the variation of the time of flight over a given length of beamline with transverse amplitude is related to the derivative of the tune over that same length of beamline with respect to energy (the chromaticity) by 2 ( E ) J n , (1) where J n is the normalized transverse action (in eV-s). Figure 6: Trajectories in a FODO lattice, demonstrating that path lengths are longer for particles with larger transverse amplitude. Thus, there is no effect expected if the chromaticity is corrected in the machine. There are, however, two instances where the chromaticity cannot be fully corrected: the initial accelerating linac, and in the linear non-scaling FFAGs. For a linac where the magnetic fields are adjusted to keep the phase advance per cell a constant, and where the cell lengths and accelerating gradients are constant, the time of flight difference along the full length of the linac can be written as pf Jn , (2) 2 ln E pi where is the chromaticity per cell, defined such that tune is , with being the relative momentum deviation, E is the energy gain per cell, pi is the reference total momentum at the beginning of the linac, and p f is the reference total momentum at the end of the linac. Synchrotron oscillations will cause the late arriving particles to be exchanged with earlier arriving ones, mitigating this effect (actually resulting in a shift in the equilibrium energy). For the last section of linac from Study IIa [1], the resulting additional phase slip at the end of the linac is about 30° at the maximum transverse acceptance. In that section of linac, synchrotron oscillations are negligible. When combined with the earlier sections of linac (which still have a relatively small amount of synchrotron oscillation) and the subsequent linac in the RLA stage (which simply acts like an additional section of linac), this amount of phase slip is a potential cause for concern. The complete system has yet to be simulated and analyzed, but these preliminary calculations indicate that it would be preferable to lower the final energy of the initial linac below the Study IIa value of 1.5 GeV, to a value of 1.2 GeV. The same problem occurs in linear non-scaling FFAGs. For the purposes of this issue, linear non-scaling FFAGs can be treated as accelerating uniformly and having a tune per cell which does not vary with the position in the machine (but does vary with energy). The time of flight difference after accelerating through a linear non-scaling FFAG is thus approximately J n , (3) 2 E where is the difference between the tune per cell between the initial and final energies, and E is the energy gain per cell. This becomes particularly problematic when transferring a beam from one FFAG to another: the phase space dynamics in the FFAG mean that a particle with high amplitude should initially arrive earlier than a low amplitude particle to be accelerated, while Eq. (3) indicates that particles with higher transverse amplitude exit the FFAG later than those with low transverse amplitude. Scaling FFAGs do not suffer from this problem, since they have no tune variation with energy. This is part of the motivation an alternative configuration using a scaling FFAG at lower energies that is described below. Addressing the Problem in FFAGs We know of no way of completely eliminating the problems caused by the time of flight dependence on transverse amplitude in linear non-scaling FFAGs. However, we hope to minimize the emittance growth that this causes by a number of methods: We will make optimal use of the longitudinal phase space. The choice of the initial conditions in longitudinal phase space, both for the centroid of the beam and the orientation of the beam ellipse, are important for minimizing the longitudinal distortion [20]. Criteria on the acceptable level of longitudinal distortion will then help determine some of the machine parameters. How to choose these initial conditions and machine parameters has been studied only for the case where the time of flight is a symmetric parabolic function of energy [20]. We will work out how to optimally choose the initial conditions and machine parameters for the more general case. We will then use these results for the time of flight curves over the entire desired range of transverse amplitudes to optimally choose initial conditions and machine parameters for the real system. We will not try to accelerate particles that simultaneously have large transverse and longitudinal amplitudes. This corresponds to transporting a six-dimensionally ellipsoidal phase space, rather than a phase space that is a tensor product of a fourdimensional transverse ellipsoid and a longitudinal ellipse. This is unlikely to have major consequences, since one expects this to cut off a relatively small number of particles, and it is likely that some other system would cause these particles to be lost anyhow. We will add sextupoles to reduce the range of tunes in the machine. Equation (3) shows that for a uniform acceleration rate (a good approximation for these purposes), the time of flight variation with transverse amplitude is proportional to the change in tune from the beginning to the end of the acceleration cycle. The addition of sextupoles can reduce this tune difference. At some energies, the chromaticity actually increases locally (so one must be careful about what this does to the longitudinal phase space), but its average over the energy range of the machine is reduced. The addition of sextupoles reduces the dynamic aperture. The dynamic aperture appears to be acceptable with reduced by 20–30%. Unfortunately, this requires that the low energy horizontal tune be kept below 1/3 to avoid the 3 x 1 resonance line which is driven by the sextupole components, and it may require the avoidance of the 4 x 1 and 4 y 1 resonances as well, all of which lead to a reduction in the number of passes one can make through the RF [21]. We will increase the average amount of RF voltage per cell. Equation (3) shows that the time of flight variation with transverse amplitude is inversely proportional to the energy gain per lattice cell. Before the discovery of this effect, the optimization procedure [10] generally left a large number of cells in the lattice without RF, since that reduced the magnet aperture and increased the number of passes that were made through the RF with only a modest decay cost. Updated designs will lack these empty cells. If necessary, one can increase the number of RF cells per cavity to two and even further increase the energy gain per lattice cell. This correction will reduce the number of passes that one can make through the RF. It is important to achieve the maximum RF gradient possible in the cavities, and thus R&D in this area is important. We will add higher harmonic RF cavities. The shape of the longitudinal phase space (see Fig. 0) will cause particles with a different time of flight profile vs. energy to arrive at the extraction point with different energies as well as different times. Higher harmonic RF cavities will reduce this energy variation. We will consider over-correcting the chromaticity in the transfer lines. If the chromaticity is made positive in the transfer lines, Eq. (1) indicates that it will pre- or post-correct the time of flight variation with transverse amplitude, reducing the average effect, and possibly improving the phase space transmission through the FFAG in the case of pre-correction (see Fig. 0 and the discussion above). It will have to be ascertained if over-correcting the chromaticity in the transfer lines has a negative impact on beam loss or emittance growth in those transfer lines. FFAG Tracking Results with Magnet Errors A non-scaling FFAG lattice has a high superperiodicity: the superperiod is a single cell. The cell tune is chosen below 0.5, and thus a perfect lattice is free from integer and halfinteger resonances. However, once the periodicity is broken due to either misalignment or gradient errors of magnets, we have to take into account the whole machine tune of the ring instead of the cell tune. In fact, both horizontal and vertical tunes vary by several units during acceleration. Crossing of integer and half-integer resonances becomes a concern. In practice, alignment errors excite integer resonances and gradient errors drive integer and half-integer resonances. Furthermore, although the lattice consists of only dipole and quadrupole magnets, the end fields have nonlinearity which could excite nonlinear resonances. The large muon beam normalized acceptance of 30 mm-rad makes kinematic terms non-negligible and they becomes another source of nonlinear resonances. Broken of lattice symmetry may enhance the harmonic content of those nonlinear resonances. A tracking study has been performed with various random errors on a 10 to 20 GeV linear non-scaling FFAG ring. We included alignment and gradient errors. We assume that the defocusing and focusing quadrupole in each cell are on a single support table and misaligned together in horizontal and vertical directions. We did not introduce magnet tilts or longitudinal displacements. Distribution of both errors is Gaussian with a cut at 2 sigma. In order to see the statistics, 40 different cases are examined. Particles gain the same amount of energy per cell, independent of the RF phase, to avoid difficulties related to the time of flight variation with transverse amplitude. This is necessary to separate particle loss due to resonance crossing from other sources. Acceleration from 10 to 20 GeV is completed within 17 turns, giving almost the same crossing speed at individual resonances as the nominal acceleration. The 500 macro particles are distributed in ellipsoidal volume in 4-D transverse space with a waterbag distribution function. There is also a spread in momentum and initial phase corresponding to the nominal neutrino factory values. There is no momentum or phase spread initially. Although we introduce errors in the lattice, we still assume the distortion of lattice beta functions is small. In other words, the initial particle distribution is matched to unperturbed lattice functions, not to the perturbed ones. To make sure this assumption reasonable, we chose the initial tune of a ring away from integer and half-integer resonances at the injection momentum. Thus, the initial momentum was set at 9.965 GeV/c, instead of adjusting quadrupole strength. In order to judge particle loss, particle amplitude, or more specifically single particle emittance, is calculated at every cell for the all macro particles. If the amplitude is more than 45 mm-rad, that is 1.5 times the acceptance, the particle is regarded as lost. Figure 0 (a) shows the tracking results when the lattice has various gradient errors and Fig. 7 (b) shows the tracking results when the lattice has variour alignment errors. The number of survival macro particles is plotted as a function of those errors. Each point corresponds to an individual lattice with different error seed. The number at left bottom corner of each graph shows the RMS value of alignment error. These figures shows that alignment errors should be 100 m (RMS) and gradient errors should be 10 x 10-4 (RMS) when the maximum allowable loss is 10%. Another tracking result confirms that the two errors are additive with no correlation. Those numbers are by no means easy to achieve, but it is not impossible to do so with present technology. Further studies should be performed to better understand these error tolerances. We should consider how much emittance growth we are willing to tolerate and adjust the amplitude at which we throw out particles in the simulation accordingly. This would require that apertures be enlarged, and the cost and possibility of doing so should be studied. Closed orbit distortion is not expected to be a significant problem due to the rapid acceleration. The dependence of particle loss on resonance crossing speed should be studied. Although there may not be much room for adjustment in reality, higher crossing speeds (i.e., faster acceleration rates) should reduce the particle loss. Finally, the loss due to individual resonance crossings instead of loss during a whole cycle should be investigated. Although a beam crosses many resonances, there may be a limited number of resonances which really affect the beam. A study of individual crossing and the relation between particle loss and the driving term of each resonance would give us more insight into the loss and hopefully suggest a way of correction. Figure 7: Number of survival particles with alignment and gradient errors. For each condition, 40 random seeds are taken. (a) (b) Figure 07: Number of surviving particles with gradient errors (a) and alignment errors (b). Multiple Bunch Trains As described in other sections of this document, it is desirable to have multiple bunches accelerated in each proton driver cycle. If one delivered those bunches to the muon cooling and acceleration system separated by a time greater than the cavity fill time, one would substantially increase the average power required for a muon accelerator, since most of the stored energy in the cavities is thrown away after each muon pulse train. Furthermore, one would increase the requirements on the power sources for the cavities, since their duty factor would increase substantially. Instead, one can deliver the bunch trains in rapid succession to the muon cooling and acceleration system. In doing so, one must be concerned with the acceleration systems where multiple passes are made through the RF cavities, in particular the FFAGs, since the beam extracts a non-negligible fraction of the stored energy in the cavities in those cases. If that stored energy is not restored, different bunch trains will be accelerated by different amounts. Consider a 10–20 GeV FFAG, containing 54 cavities. Assume that the maximum power delivered to the cavity, due to limitations of the input coupler, is 1 MW. Assume a 4 MW proton driver, delivering some number of proton bunches in rapid succession every 20 ms, with 24 GeV protons and 0.17 muons per proton at the acceleration. Then the minimum time between bunch trains and the minimum time for the entire sequence of trains, as a function of the number of trains, is Bunches in Train Time between bunch trains (μs) Time for all bunch trains (μs) 2 105 105 3 70 140 4 52 157 5 42 168 Unfortunately, due to the use of a mercury jet target, if the time between proton pulses hitting the target is too long, the target will begin to break up and not provide a suitable target for the protons. The times indicated for the entire bunch train are unfortunately substantially longer than what that breakup time is assumed to be (around 50 μs). Reducing the energy gain per cavity would reduce the time required for the bunch train, but it would require substantially more cavities, it would increase the effect of beam loading on different bunches within the same train, and it would worsen the effects of the variation of the time of flight with transverse amplitude. Instead, the proposed solution is to drive different cavities with slightly different frequencies, creating a beat wave with a period that is long compared to the time for the bunch train. The phasing of that beat wave can be chosen, in combination with the energy loss from beam loading, to make all the bunch trains gain the same amount of energy. This will, unfortunately, require a larger number of RF cavities to be installed. The time between bunch trains can then be reduced to any time that is greater than the time spent in a single stage of acceleration. In earlier FFAG designs, the time spent in the 10–20 GeV FFAG stage was about 21 μs, meaning that if all the bunch trains could take at most 50 μs, one would be limited to 3 bunch trains per proton driver cycle. However, the updated FFAG designs may have somewhat smaller times spent in them, since the issue of the time of flight dependence on transverse amplitude will be addressed by having a larger average accelerating gradient. On the other hand, the beat frequency solution will reduce the average accelerating gradient. References [1] J. S. Berg et al., Phys. Rev. ST Accel. Beams 9, 011001 (2006). [2] J. Scott Berg, Carol Johnstone, and Don Summers, in Proceedings of the 2001 Particle Accelerator Conference, P. Lucas and S. Webber, eds., IEEE, Piscataway, NJ (2001), p. 3323. [3] K. R. Symon et al., Phys. Rev. 103, 1837 (1956). [4] F. T. Cole et al., Rev. Sci. Instrum. 28, 403 (1957). [5] D. W. Kerst et al., Rev. Sci. Instrum. 31, 1076 (1960). [6] NuFactJ Working Group, A Feasibility Study of a Neutrino Factory in Japan (2001). http://www-prism.kek.jp/nufactj/ [7] D. Trbojevic and E. Courant, in Fourth European Particle Accelerator Conference, V. Suller and Ch. Petit-Jean-Genaz, eds., World Scientific, Singapore (1994), p. 1000. [8] C. Johnstone, W. Wan, and A. Garren, in Proceedings of the 1999 Particle Accelerator Conference, New York, 1999, A. Luccio and W. MacKay, eds., IEEE, Piscataway, NJ (1999), p. 3068. [9] F. E. Mills and C. Johnstone, in Proceedings of the 4th International Conference on Physics Potential & Development of μ+ μ– Colliders, San Francisco, CA (UCLA, Los Angeles, CA, 1999), pp. 693-698. [10] J. Scott Berg, in The International Workshop on FFAG Accelerators, October 13– 16, 2004, KEK, Tuskuba, Japan, S. Machida, Y. Mori, and T. Yokoi, eds. (2005), p. 1, available from http://hadron.kek.jp/FFAG/FFAG04_HP/. Also MUC-CONFACCELERATION-309. [11] S. Machida, in The International Workshop on FFAG Accelerators, December 5–9, 2005, KURRI, Osaka, Japan, Y. Mori, M. Aiba, and K. Okabe, eds. (2006), p. 65. http://hadron.kek.jp/FFAG/FFAG05_HP/ [12] S. Machida, “FFAGs as Muon Accelerators for a Neutrino Factory,” to appear in the proceedings of the 10th Biennial European Particle Accelerator Conference, EPAC’06 (2006). [13] G. H. Rees, Nucl. Phys. B (Proc. Suppl.) 155 (2006), 301–304. [14] G. H. Rees, “Design of an Isochronous FFAG Ring for Acceleration of Muons,” unpublished note (2005). [15] F. Lemuet, F. Méot, and G. Rees, in Proceedings of 2005 Particle Accelerator Conference, C. Horak, ed. (IEEE, Piscataway, NJ, 2005) p. 2693. [16] F. Méot, presentation at the FFAG Workshop, Fermilab, April 3–7, 2005, http://www.bt.pa.msu.edu/ffag/ [17] Dejan Trbojevic, oral presentation, 2003. [18] A. G. Ruggiero, Brookhaven National Laboratory Collider-Accelerator Department report C-A/AP/208 (2005), http://www.agsrhichome.bnl.gov/AP/ap_notes/cad_ap_index.html. [19] J. Scott Berg, BNL-76759-2006-JA, MUC-PUB-338, arXiv:physics/0607275, submitted to Nucl. Instrum. Methods A (2006). [20] J. Scott Berg, Phys. Rev. ST Accel. Beams 9, 034001 (2006). [21] J. Scott Berg and Carol Johnstone, in Proceedings of the 2003 Particle Accelerator Conference, Joe Chew, Peter Lucas, and Sara Webber, eds., (IEEE, Piscataway, NJ, 2003) p. 2216.