Distributed Web-Based Desktop E
advertisement

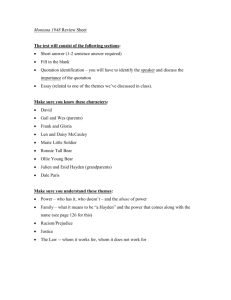
2nd International Conference on Autonomous Robots and Agents December 13-15, 2004 Palmerston North, New Zealand Distributed Web-Based Desktop E-Manufacturing System Jyh-Hwa Tzou Department of Mechanical Engineering, Wu-Feng Institute of Technology Chian-Kuo Rd, Sec. 2, Ming-Hsiung, Chia-Yi 621, Taiwan, R.O.C. Email: tzoujyh@mail.wfc.edu.tw Abstract Rapid prototyping (RP) is an automated manufacturing process that quickly builds physical models from CAD files of 3D prototypes. With the high advanced network technologies, many different software and hardware systems can be integrated as a distributed platform to provide more services, solve more complicated problems and achieve better performance. The main objective of this paper is to develop web-based automated RP system, which provides customers the convenience of distance manufacturing without having an expensive RP machine. We take the advantage of the internet technology to combine product quotation interface, on-line remote monitoring system and order scheduling into a web-based automated RP system. In the mean time, we developed three kinds of rapid prototyping system. (1)Thermal extrusion based RP system,(2)Photo-mask based RP system and (3)Metallic RP system, which demonstrated the various fabrication principles and options. Keywords: RP (Rapid Prototyping), E-manufacture, Distributed system, scheduling program, Product quotation. 1 Introduction With the explosion of the Internet in recent years, e-Business systems are the latest advance in information technology (IT) and business process improvement. Many web-based applications have been developed to reduce the cycle time of transactions.[1] In the RP industry, how to quickrespond to the quotation and select an appropriate RP machine is a critical issue. RP machine is a powerful tool to build RP parts, but it is too expensive for many companies. Therefore, it can make the RP machine more efficient and more useful through the internet. We know that the internet has taken its place beside the telephone and television as an important part of people's lives, and it offers a convenient means for e-commerce activities which can be conducted almost anywhere any machine and at anytime the customer wants. The e-commerce technology is springing up quickly following internet development and it can make prototype production cheaper and easier in the world. E-commerce is going to have a profound effect on the people's lives and work, the enterprises and the government. Ecommerce offers the opportunity to explore new frontiers of collaboration, communication and coordination between consumers and businesses. One of the most important distinctions between the modern business and the traditional business is that on-line automated cost estimation which provides the more convenient and faster service. 2 The architecture of distributed RP system With current advanced network technologies, many different software or hardware systems can be 356 integrated as a distributed platform to provide more services, solve more complicated problems and achieve better performance (Figure 1). The first job to integrate different RP systems on the Web is to make these systems communicate to each other. However, the different RP systems may not communicate to each other easily because they are built on different operating systems, use different communication protocols. CORBA (Common Object Request Broker Architecture) has been proposed to integrate diverse applications within distributed heterogeneous environments such that these different RP systems can be easily integrated regardless of what language they are written in or where these applications reside with any commercial CORBA solutions [2],[3]. Figure 2 is the architecture of the RP web platform. The virtual server can select an appropriate RP machine to manufacture the prototypes according to user requirements, such as short processing time and low cost. [4] Figure 1: The integration of different Web RP manufacturing system. 2nd International Conference on Autonomous Robots and Agents December 13-15, 2004 Palmerston North, New Zealand slicing and pathing results before actual RP manufacturing. Virtual server adaptor communicates with the coordinator to receive prototype specification and to send back simulation results. 3 The application of E-manufacture on RP system Figure 2: RP Web platform architecture In Figure 2, we show the architecture of main components in the Web platform and the design of components is briefed as follows: RP Client: Users design and simulate slicing and pathing results through a Web browser on a RP client. A client adaptor runs on the same machine and a user can send the request through the browser without knowing the existence of any adaptors. Client adaptors have been implemented to run on different operating systems such as Linux, Solaris, or Microsoft Windows and are responsible for sending user requests and receiving simulating or manufacturing results. Coordinator: A coordinator is the kernel of the Web platform. It receives requests from RP clients and schedules either simulating or manufacturing requests according to real-time scheduling algorithms to guarantee timing constraints and user requirements to balance the load on different machines individually. The coordinator also caches user requests and keep track of RP server information/status for scheduling references. If a request cannot be satisfied at this moment, it will be delayed and try later when any previous request is finished. The coordinator adaptor is running on Linux through CORBA to communicate with client and server adaptors on different operating systems. Database: The database stores information of the entire system, including hardware specification, performance and status of RP servers or virtual servers, prototype specification and user requirement of each request, etc. The database also stores some sample CAD files of prototypes. The files are in “.stl” format, but not limited to, in our platform. Sample files can be downloaded to client adaptors for users to modify or design new prototypes. RP Server: an adaptor runs on a RP server to control and monitor the RP machine connected. It receives prototype specification from coordinator and informs RP machine to start RP manufacturing. It is also responsible for transmitting the manufacturing video stream back to client adaptors. Virtual Server: Virtual server simulates the 357 Figure 3: Flowchart of RP E-manufacturing system The E-Manufacturing application framework of web–based RP system mainly includes five parts. (1)Open STL file and display it using Open GL technology, (2) Product quotation system, (3) Select a suitable RP system, (4) Joint alliance system, (5) Order scheduling program. The flowchart of the RP E-manufacturing system is shown in Figure 3. The Open GL technology can be used to show the 3D models with different color on different directions. The product quotation system supplies an on-line automated cost estimation related to the option of materials, manufacturing time and RP machines before the RP part being manufactured. In the RP selection system, we can use some conditions (such as 2nd International Conference on Autonomous Robots and Agents December 13-15, 2004 Palmerston North, New Zealand materials, cost, and manufactured time) to select the appropriate RP machine. This web-based RP selection system can help users to select an appropriate RP machine. After evaluating, the system shows the manufacturing time and cost. When customers are satisfied with this estimation, they can transmit STL file via the internet to the RP web server. After scheduling, the web server can transmit the STL file to the RP machine that chosen by the customers. Then the RP part can be manufactured in the chosen RP machine. During manufacturing process, customers also can watch a live image of RP part via internet, and monitor the RP machine which fabricates physical part through CCD camera. If customers or companies want to joint the alliance, they can joint the system as a member of the association and upload the information of their RP machine (introduction, specification of the RP machine, and the manufactured parts) to the RP WEB server. 3.1 they can upload the STL file via the internet to the RP Web server. After finishing the order scheduling, the web server can transmit the STL file to the customer chosen RP machine. Then the RP part can be manufactured in our RP machine. [4] Figure 5: Interface of showing STL file and product quotation The RP E-manufacturing system portal site The website includes the interface showing STL file, selection of RP machine, the product quotation and the join alliance system. The flowchart of RP Emanufacturing system portal site is shown in Figure 4 [5]. Figure 6: The RP selection system Figure 4: The flowchart of RP E-manufacturing system portal site The interface of showing the STL file and product quotation system is shown in Figure 5. The system provides customers to view 3D model, rotate the 3D model, select color, slice, generate tool paths and scale it on the web. Product quotation system provides customers to evaluate the product. After evaluating the product, the system displays required results (such as total fabricating time, volume and cost). When customer satisfied with this estimation, 358 Figure 7: Hierarchy of joint alliance system The RP selection system is shown in Figure 6. The system provides some choices (materials, cost, and manufacturing time) for customer to select proper RP machine. If there are many selections of RP machine on the web, this system can assist customer to choose the appropriate one. The system can efficiently save time in the selection of RP system. 2nd International Conference on Autonomous Robots and Agents December 13-15, 2004 Palmerston North, New Zealand After finishing the evaluation, the system shows the manufacturing time and cost. Then the RP part can be manufactured in our RP machine. The site hierarchy of alliance system is shown in Figure 7. When customers or companies want to join our alliance system, they can upload the information which includes the introduction of the RP machine, the photographs of the RP machine, and the pictures of the completed RP parts. 3.2 Metallic RP system CCD RS 232 RP Controller 4-Axis Motion Card Workstation/ WWW Client 4 4.1 The developed RP systems Thermal extrusion based RP system The thermal extrusion based RP system is shown in Figure 10. There are two lights, two CCDs, 2Dplanar XY table, thermal extrusion head, z-axis elevator, and brush. The CCD is used on the remote monitoring system. It can provide the real time online images when the RP system is working. The user can also control the CCD viewpoint through the browser. The brush is used to clean the tip of the thermal extrusion head. [8] The order scheduling system Thermal extrusion RP system Then the RP part can be manufactured in our RP machine. The architecture of RP database is shown in Figure 9. The RP database framework mainly includes three parts: (1) Alliance system, (2) Data of the members, (3) Order scheduling program. [7] RS 232 iMac/ WWW Client Z axis elevator In t e r n e t RP Controller 4-Axis Motion Card Elevator WWW Server PC PC/ WWW Client Thermal extrusion head Electronic photo-mask Pump Light source RP part PC-based Controller Notebook/ WWW Client Steel brush cleaner CCD camera 1 FDM 2000 Photo-mask based RP system CCD camera 2 Linear planar motor table Figure 8: Architecture of scheduling system Figure 10: The thermal extrusion based RP system RP Database 4.2 Photo-mask based RP system Elevator Alliance system Electronic photo-mask Order scheduling Members database Pump Light source RP machine RP Manufacturer data data Member data Superuser data Thermal extrusion RP system data Metallic RP Photo-mask system data based RP system data PC-based Controller FDM 2000 data Figure 11: The physical photo-mask based RP system Figure 9: Architecture of RP database The architecture of order scheduling system is shown in Figure 8. E-commerce is about using technology to streamline business model and increasing its efficiency. All customers’ data exist in the database of RP web server. The RP web server transmits the first order to the chosen RP machine. 359 The photo-mask based RP system is shown in Figure11. A rapid prototyping system that is based on the electronic photo-mask to build RP parts layer by layer. Unlike general liquid-based rapid prototyping systems, the proposed system makes use of planeshaping method to substitute for line-shaping method, and the light source, laser beam, is superseded by 2nd International Conference on Autonomous Robots and Agents December 13-15, 2004 Palmerston North, New Zealand general visible light. The desktop manufacturing system has the advantages of low cost, compactness and no support needed. [9] 4.3 Metallic RP system The system architecture is shown as Figure 12. The 2500W CW Nd-YAG laser, which is transferred through the optical fiber, is focused to melt the metallic powder on the pre-placed powder mechanism. The pre-placed powder mechanism is placed on the XY table, and the laser head is mounted on the z axis elevator. After fabricating one layer, the RT forming trough of the powder mechanism will descend one layer thickness and the powder feeding trough will ascend one layer thickness at the same time. Then the flat scraper will move from left to right, so that the powder placed on the top of RT forming trough is flat. The next layer of powder is laid and the scanning by Nd-YAG laser is repeated. Layer after layer, the metallic powders are added and melted until the whole RT part is completed. [10] Laser head X-Y table manufacturing via internet. The final RP parts manufactured by the thermal extrusion based RP system are shown in Figure 17. The finished 3D RT parts manufactured by the metallic RP system are shown in Figure 18. Figure 14: The quotation result of arrow model Shielding gas supply Pre-placed powder mechanism Figure 12: The physical metallic RP system 5 Experimental results Figure 15: The quotation result of vase model Figure 13: The quotation result of thin cylinder model The evaluated result of the models is shown in Figure13, 14, 15. The client-side interface of remote monitoring system is shown in Figure 16. Customers can observe a live image of RP part during RP 360 Figure 16: The interface of remote monitoring system 2nd International Conference on Autonomous Robots and Agents December 13-15, 2004 Palmerston North, New Zealand 7 Figure 17: The final RP parts manufactured by the thermal extrusion based RP system Figure 18: The finished RT parts manufactured by the metallic RP system 6 Conclusions Several RP machines developed by our laboratory can be integrated and the RP resources could be shared on the Web. Users and customers can design, simulate and manufacture RP parts through a Web interface. The objective of this paper is to develop an E-Manufacturing, remote supervisory control rapid prototyping system. The main purpose of the system is to provide remote customers some services through the internet to use the RP machine. The system also can show information to the customers through the internet, and provide various services (such as show STL file, the product quotation system and selection of RP machine). If customers are satisfied with this estimation, they can transmit STL file via the internet to the RP web server. After scheduling, the web server can transmit the STL file to the RP machine which is chosen by the customer. Then the RP part can be manufactured in our RP machine. Several RP and RT part manufactured by the proposed RP/RT systems are also shown in this paper. In the future, we will continue to enhance RP part quality and improve the system efficiency. After the RP manufacturing process is completed, the GSM module can send a message to inform the supervisor and the customer. 361 References [1] Froehlich, G.; Liew, W.; Hoover, H.J.; Sorenson, P.G., “Application framework issues when evolving business applications for electronic commerce”, Proceedings of the 32nd Annual Hawaii International Conference on Systems Sciences, pp.10, 1999. [2] Vinoski “CORBA: Integrating Diverse Applications Within Distributed Heterogeneous Environments” to appear in the feature topic issue of the IEEE Communications Magazine, Vol.35, No.2, February 1997. [3] J.A.Zinky, D.E.Bakken, and R.Schantz,” Architectural Support for Quality of Service for CORBA Objects, “Theory and Practice of Object Systems, vol.3, no.1, 1997. [4] Hsin-Hung Lin, Chih-Wen Hsueh, and Chun-Chih Lin, ‘’A Distributed Real-Time Web Platform for Rapid Prototyping Manufacturing System’’, IEEE/ASME International Conference on Advanced Manufacturing Technologies and Education in the 21st Century, Chiayi, Taiwan, August 2002. [5] Chung-Sheng Li, “Media commerce”, IEEE Circuits and Systems Magazine , Volume: 2 Issue: 1 , 2002, Page(s): 4 -22 [6] Ren C. Luo., Wei Zen Lee, Jyh Hwa Tzou, Hou Tin Leong, “The development of Internet accessible rapid prototyping system“, Industrial Electronics Society, 1999.IECON '99 Proceedings. The 25th Annual Conference of the IEEE, Volume: 3, 1999, Page(s): 1498 -1503 vol.3 [7] A., Klusch, M., “ Agent-based integrated services for timber production and sales Gerber”, IEEE Intelligent Systems [see also IEEE Expert] , Volume: 17 Issue: 1 , Jan.-Feb. 2002, Page(s): 33 39 [8] Ren C. Luo, Jyh-Hwa Tzou, Cheng-Yi Hsieh, Hsiu-Hung Chou, “The Development of a Thermal Extrusion Based Rapid Prototyping Mechatronics system”, 2002 IEEE International Conference on Industral Electronics, Control, and Instrumentation (IECON’02), Sevilla Spain Nov 2002. [9] Ren C. Luo, Hsiao Cheng Lin, Jyh Hwa Tzou, “The Development of a Photo-mask Based Desktop Manufacturing System”, 7th International Conference on Mechatronics Technology ICMT2003, Taipei, Taiwan, December 2~6,2003 [10] Ren C. Luo ,Chun-Ching Chen and Jyh Hwa Tzou, "The Development of a Mechatronic Rapid Tooling System" , 7th International Conference on Mechatronics Technology ICMT2003, Taipei, Taiwan, December 2~6, 2003