Computation of the distance spectrum of convolutional codes and
advertisement

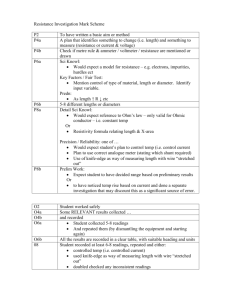
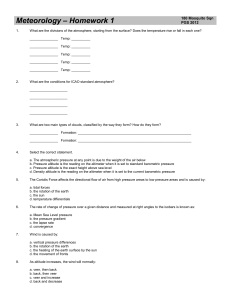
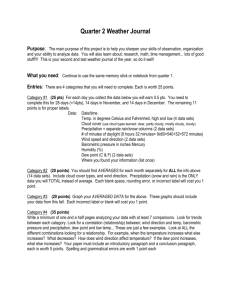
Computation of the distance spectrum of convolutional codes and the delay spectrum of a network (Semester Project) Name: Guftaar Ahmad Sardar Sidhu Majors: Communication Systems and Electronics Supervisor: Prof. Dr. Werner Henkel Tutor: Neele von Deetzen Semester: Fall 2007 Institute: Jacobs University Bremen, Germany 1 Contents 1 Convolutional codes 1.1 Overview . . . . . . . . . . . . . . . . . . . 1.2 Representation of convolutional codes . . . 1.2.1 Generator polynomials . . . . . . . 1.2.2 Generator matrix . . . . . . . . . . 1.2.3 Tree diagram . . . . . . . . . . . . 1.2.4 State diagram . . . . . . . . . . . . 1.2.5 Trellis diagram . . . . . . . . . . . 1.2.6 Logic table . . . . . . . . . . . . . 1.3 Distance properties of convolutional codes 1.3.1 Free distance . . . . . . . . . . . . 1.3.2 Distance spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 4 4 4 5 5 6 6 7 7 7 2 Computation of the distance spectrum and the free distance 9 2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 2.2 Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . 9 2.2.1 Using Matlab’s symbolic math toolbox . . . . . . . . . 10 2.2.2 Without using Matlab’s symbolic math toolbox . . . . 11 3 A network application 3.1 Overview . . . . . . . . . . . 3.1.1 Network delay . . . . 3.1.2 Delay jitter . . . . . 3.2 Finding the delay spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Codes 4.1 Finding distance spectrum by using symbolic math toolbox . . 4.2 Finding distance spectrum without using symbolic math toolbox 4.3 Finding Delay Spectrum(network delay and delay jitter) of a Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 12 12 12 12 12 15 15 16 18 Chapter 1 Convolutional codes 1.1 Overview A convolutional code is a type of error correcting code, first introduced by Elias in 1955, in which each k-bit symbol is transformed into an n-bit symbol where k/n is the code rate. Figure 1.1 shows a rate 1/2 convolutional encoder. The name convolutional codes is due to the fact that the input-output Figure 1.1: Rate 1/2 convolutional encoder relation is a convolution. The transfer function of a convolutional encoder gives the relationship between the input sequence and the output sequence. vij = ∞ X k=0 3 gkj ui−k . where u is the input sequence, vj is output sequence at output j and gj is an impulse response for output j. A binary convolutional code can be represented by a three-tuple (n, k, m). The current n outputs are linear combinations of the present k input bits and the previous m · k input bits, where m is the number of memory cells for each input sequence. The constraint length L represents the maximum time interval out of the input sequence that influences an output sample and hence L = m + 1. The constraint length determines the power and complexity of a code. Convolutional codes are used in applications such as cellular mobiles, satellite communication, digital video and broadcasting etc. 1.2 Representation of convolutional codes Following are the different ways of representing convolutional codes. 1.2.1 Generator polynomials For the convolutional codes, we specify a set of n vectors, one for each of the outputs. Each vector of the dimension m + 1 indicates the connection of the shift register to that ouput, a ’1’ in the ith position of the vector indicates that the corresponding shift register is connected to the modulo-2 adder and a ’0’ indicates no connection. The generator polynomials for the rate 1/2 covolutional encoder shown in Fig.1.1 are G0 (D) = 1 + D + D 2 and G1 (D) = 1 + D 2 . and generally they are written as G0 =[1 1 1] and G1 =[1 0 1]. 1.2.2 Generator matrix A generator matrix of a convolutional code is a transfer function matrix of the convolutional encoder. The generator matrix for a convolutional code can define the code. The convolutional codes can be generated by a generator matrix multiplied by the information sequence. If u and v are the polynimials representing the information sequence and the output sequence respectively, the relation between u and v can be characterized as v = u · G where G is the generator matrix of the code. The generator matrix for the above encoder in Fig.1.1 is G(D) = (1 + D + D 2 1 + D 2 ) . 4 1.2.3 Tree diagram The tree diagram shows the structure of the encoder in the form of a tree with the branches representing the state transitions and nodes representing the various states of the encoder. The tree diagram for our 1/2 encoder is shown in Fig.1.2. An upward branch in Fig.1.2 corresponds to a ′ 0′ input and downward direction corresponds to a ′ 1′ . The labels of the branches are the corresponding code symbols and the nodes are labeled with the encoder states. Figure 1.2: Tree diagram 1.2.4 State diagram Since the output of the encoder is determined by the input and the current state of the encoder, a state diagram can be used to represent the encoding process. The state diagram is simply a graph of the possible states of the 5 encoder and the possible transition from one state to the other. Figure 1.3 shows the state diagram of the 1/2-rate convolutional encoder of Fig.1.1. Figure 1.3: State diagram 1.2.5 Trellis diagram A tree structure repeats itself once the number of stages is greater than the constraint length. It is observed that all branches emanating from two nodes having the same state are identical in the sense that they generate identical output sequence. So every two nodes having the same label can be merged. By doing this throughout the tree diagram, we can obtain another diagram called a trellis diagram which is a more compact representation. This is the most common representation, especially, since it is the basis for the most important Viterbi decoding algorithm. State diagram and trellis diagram can be used to describe different properties of convolutional codes. Figure 1.4 shows the trellis diagram of the above encoder example. 1.2.6 Logic table A logic table can also be built showing the outputs of the convolutional encoder and the state of the encoder for all of the specific input sequence present in the shift register. 6 Figure 1.4: Trellis diagram 1.3 Distance properties of convolutional codes Following are different distance properties of convolutional codes. 1.3.1 Free distance The free distance df ree of a convolutional code is the minimum Hamming distance between different encoded sequences. In Fig.1.5 the path represented by a bold line, is the path that is remerging to the all zero state with minimum hamming weight. So in this case the free distance is df ree = 5. Figure 1.5: Free distance 1.3.2 Distance spectrum The distance spectrum of an (n, k) convolutional code is given by the function T (W, D, L) = ∞ X ∞ X ∞ X w=0 d=0 l=0 7 Tw,d,l · W w D d Ll , where W, D, and L are placeholders and w, d, and l represent the input weight, the output weight, and the length of the sequence, respectively. n and k are the number of output bits and the number of input bits of the encoder. The coefficient Tw,d,l denotes the number of trellis paths with input weight w, output weight d, and length l. For example, the expression 2W D 2L + 4W 2 D 3 L4 denotes T1,2,1 = 2 paths with input weight 1, output weight 2, and length 1, as well as T2,3,4 = 4 paths with input weight 2, output weight 3, and length 4. 8 Chapter 2 Computation of the distance spectrum and the free distance 2.1 Overview We know that the distance spectrum of a convolutional code is T (W, D, L) = ∞ ∞ X ∞ X X Tw,d,l · W w D d Ll . w=0 d=0 l=0 The distance spectrum can easily be generated using the following formula. T (W, D, L) = ∞ X a · Si · b , i=0 where a, S, and b are vectors and matrices of dimensions [1 × 2M −1 ], [2M −1 × 2M −1 ], and [2M −1 × 1]. The entries of a, S, and b are polynomial with the placeholders W, D, and L, representing transitions in the trellis. In case of no existing transition, the entry is 0. Otherwise, it is W w D d Ll . a defines all transitions going from the all-zero state to other states, S describes the transitions between all states except the all-zero state, and b represents the transitions from all states except the all-zero state to the all-zero state. 2.2 Implementation To find the distance spectrum by this matrix multiplication method a function in Matlab is implemented, which generates the distance spectrum of a 9 given convolutional code up to a certain length. Given is the length of the longest paths to be considered as well as the trellis structure of the code. Both are given as arguments to the function. The trellis structure is handed over as a structure called trellis, containing the fields ’next’ and ’out’. The fields ’next’ and ’out’ contain matrices of dimension [2M × 2k ] = [# trellis states × # possible input combinations]. The entries of matrix trellis.nexti,j , where 0 ≤ i ≤ 2M − 1 and 0 ≤ j ≤ 2k − 1, contain the following state of the current state i with input j, where i, j, and the matrix entries themselves are the decimal representations of the binary combinations with the least significant bit on the left. Consider an example with 4 states, 2input bits,and 2 output bits: 0 2 1 3 0 1 3 2 1 0 3 2 1 0 2 3 trellis.out = trellis.next = 1 3 0 1 3 2 0 1 2 1 3 1 2 3 1 0 Here, in trellis.next the first row corresponds to transitions from state (0)10 to states (0)10 , (1)10 , (3)10 , (2)10 with inputs (0)10 , (2)10 , (1)10 , and (3)10 correspondingly, and e.g. the entry in the second row and third column represents the transition from state (1)10 = (10)2 to state (2)10 = (01)2 with input (2)10 = (01)2 . The same structural properties hold for the above trellis.out and its entries denote the decimal representation of the binary encoder output. The first row shows the decimal outputs with transition from state (0)10 = (00)2 to all states with inputs (0)10 , (2)10 , (1)10 , and (3)10 . The function is implemented by the following two approaches. 2.2.1 Using Matlab’s symbolic math toolbox Here placeholders are defined as symbolic variables, i.e., W, D and L. All computations are done with these variables. First of all a, S and b are computed and then the distance spectrum and the output spectrum are computed on each path of trellis. For example for the above trellis structure a and b are the vectors of dimensions [1 × 3] and S is a matrix of dimension [3 × 3]. The output of the Matlab function is the polynomial showing the weights of different paths in the trellis with their corresponding lengths. The advantage of this approach is its simple implementation, but on the other hand some difficulties are also there e.g. there is no easy way to extract the powers (exponents) of variables which we need for most of the cases, and the symbolic math toolbox is also not included in Matlab by default. 10 2.2.2 Without using Matlab’s symbolic math toolbox This is a more complicated implementation. For each symbolic variable separate vectors are defined e.g. now instead of directly computing a, we have aw, ad, and al containing input weights, output weights and length exponents respectively, and then a=[aw ad al]. Similarly Sw, Sd, Sl, bw, bd, and bl are computed. Since now we are using powers of variables as entries of vectors and a zero entry would not necessarily lead to a 0 in the polynomial, so we would have to go for some other value to represent a 0 in the polynomial, just for this programming we are using −1 for the 0 in the polynomial. Initially all vectors and matrices are initialized by −1. Since now vectors and matrices contain binary numbers instead of variables, this is not the simple matrix multiplication anymore, different sub functions are used to compute the distance spectrum. This approach is more complicated to implement but it solves the problems of the previous approach i.e., extracting the powers of variables, since no symbolic variables are used at all, and also there is no need of the symbolic math toolbox. 11 Chapter 3 A network application 3.1 Overview The idea above is implemented on a small network which has some entities (e.g., routers) and some costs (e.g., delay, delay jitter, capacity, packet loss probability) belonging to transitions from one entity to another. Considering the network like the state machine of a convolutional code, a trellis is built from the network still with the costs on the paths. In the case of convolutional codes, the costs (input/output weight, length) were all additive. The costs of the network transitions may be multiplicative or even non-linear, but for simplicity only additive costs (delay and delay jitter) are considered here. We call the spectrum of these costs the delay spectrum. 3.1.1 Network delay The network delay is the time for a packet to reach a network node from another network node. 3.1.2 Delay jitter The delay jitter is the difference between the transmission delays of two IP packets. 3.2 Finding the delay spectrum Here the task is to find the delay spectrum between two nodes of a network (delay and delay jitter). A network matrix (delay matrix and delay jitter 12 matrix) with the source node n1 , which is the transmitter node, and the destination node n2 , which is the receiving node, are given. For example 0 5.3 4.5 8.7 5.2 0 9.5 4.2 delay = 4.4 9.9 0 5.1 . 8.6 17 6.1 0 The first row shows the delay between node n1 and all other nods, for example delay1,2 = 5.3 means the delay from node n1 to node n2 is 5.3 milliseconds. There are four rows which represent a total of four nodes in the network. The corresponding state diagram is shown in Fig. 3.1. First of all the program Figure 3.1: Network state diagram computes the delay.out and jitter.out matrix of dimension [n − 1 × n − 1] for two nodes, where n is the total number of nodes in the network. These .out matrices are different from the .out matrix of convolutional codes because the source node n1 and the destination node n2 are on the same state in trellis. Now we have a small number of states in the trellis. From .out, matrices a, S, and b are computed and additionally the direct path delay Dp is computed separately, where a shows all paths emerging from source node n1 to all other nodes except the destination node n2 , S shows the transitions between all nodes except the source node n1 and the destination node n2 , b shows all paths merging in the destination node n2 other than the direct path. Dp shows the direct path delay (or jitter) between the source node 13 n1 and the destination node n2 , and the delay spectrum DS is given by the formula ∞ X DS = Dp + a · Si · b . i=0 i where (a · S · b) gives the delays of paths with (i + 1) intermediate nodes in between where intermediate nodes are all nodes except source and destination node. If we want to send data from node 1 to node 4, for the delay matrix first of all delay.out is computed to find the delay between these two nodes 5.3 4.5 8.7 delay.out = 0 9.5 4.2 . 9.9 0 5.1 The column entries of first row of this matrix represent the dealys between the first node 1 and the nodes 2, 3, and 4, similarly second row represent dealys between the node 2 and the nodes 2, 3, and 4 repectively. From delay.out the following variables are computed. 4.2 5.3 D 0 D 9.5 4.5 8.7 D , b= 5.1 . Dp = D , a= D , S= 9.9 D D 0 and finally the delay spectrum is DS = D 8.7 + D 9.5 + D 9.6 + D 18.6 + D 19.9 , which shows there are four paths going from node 1 to node 4 with delays 8.7ms, 9.5ms, 18.6ms, and 19.9ms. 14 Chapter 4 Codes 4.1 Finding distance spectrum by using symbolic math toolbox function [a,s,b,T,Td,fd]=dist spect(trellis,LL) trellis next=trellis.next; trellis out=trellis.out; syms W D L s a b T a2 b2 s2 Td fd; % W=Input weight, % D=Output weight, % L=path % a2,s2 and b2 introduced to calculate output spectrum, theses are same as ’a’,’s’ and ’b’ but these only have D T=0; % ditance spectrum Td=0;%output spectrum fd=0;%free distance lef t[m,nright]=size(trellis next); % to define the size of a,s and b %Initialization of a for jj=1:m-1, a(1,jj)=0; a2(1,jj)=0; end % Initialization of ’S’ for ii=1:m-1, for jj=1:m-1, s(ii,jj)=0; s2(ii,jj)=0; end, end % Initialization of ’b’ for ii=1:m-1, b(ii,1)=0; b2(ii,1)=0; end % Computation of ’a’ i=1; for j=1:n, temp=trellis next(i,j); if temp>0, % not going to zero state tempbin1=de2bi(j-1);% Calculation of input weight(no of 1’s) w=sum(tempbin1); tempbin2=de2bi(trellis out(i,j)); % Calculation of output weight(no of 1’s) d=sum(tempbin2); a(i,temp)=W w * D d * L; a2(i,temp)=D d̂; end, end % Computation of ’S’ for i=2:m; for j=1:n, temp1=trellis next(i,j); 15 if temp1>0, tempbin3=de2bi(j-1);% Calculation of input weight(no of 1’s) , w=sum(tempbin3); tempbin4=de2bi(trellis out(i,j)); % Calculation of output weight(no of 1’s) d=sum(tempbin4); s(i-1,temp1)=Wŵ Dd̂ L; s2(i-1,temp1)=Dd̂; end, end, end % Coputation of ’b’ for i=2:m, for j=1:n, temp2=trellis next(i,j); if temp2==0 % transition to zero state tempbin5=de2bi(j-1);% Calculation of input weight(no of 1’s) w=sum(tempbin5);ctr5=0; tempbin6=de2bi(trellis out(i,j));% Calculation of output weight(no of 1’s) d=sum(tempbin6); b(i-1,1)=Wŵ Dd̂ L; b2(i-1,1)=Dd̂; end, end, end % Distance spectrum and output spectrum for i=2:LL, T=T+a sˆ(i-2)* b; Td=simplify(Td+ a2 s2ˆ(i-2)* b2); end fd=a2 s2 b2; % free distance 4.2 Finding distance spectrum without using symbolic math toolbox function [a,s,b,T,Td,fd]=dist spect2(trellis,len) trellis next=trellis.next; trellis out=trellis.out; T=0;%ditance spectrum Td=0;%output spectrum fd=0;%free distance lef t[m,nright]= size(trellis next);% to define the size of a,s and b %Initialization of a aw=-ones(1,m-1);% aw contains input weights going from ’zero’ state state to all other states ad=-ones(1,m-1);% ad contains output weights going from ’zero’ state state to all other states al=-ones(1,m-1);% al contains output weights going from ’zero’ state state to all other states %Initialization of S sw=-ones(m-1,m-1);% sw contains input weights going from all non zero states to all non zero states sd=-ones(m-1,m-1); sl=-ones(m-1,m-1); %Initialization of b bw=-ones(m-1,1);% bw contains input weights going from all non zero states to zero state bd=-ones(m-1,1); bl=-ones(m-1,1); %Computation of a, i=1;for j=1:n, temp=trellis next(i,j); 16 if temp>0% not going to zero state tempbin1=de2bi(j-1);% Calculation of input weight(no of 1’s) w=sum(tempbin1); aw(i,temp)=w; tempbin2=de2bi(trellis out(i,j));% Calculation of output weight(no of 1’s) d=sum(tempbin2); ad(i,temp)=d; if w>=0, al(i,temp)=1; end, if d>=0, al(i,temp)=1; end, end, end a=[aw,ad,al]; %Computation of S for i=2:m, for j=1:n, temp1=trellis next(i,j); if temp1>0, tempbin3=de2bi(j-1);%Calculation of input weight(no of 1’s) w=sum(tempbin3); sw(i-1,temp1)=w, tempbin4=de2bi(trellis out(i,j));%Calculation of output weight(no of 1’s) d=sum(tempbin4); sd(i-1,temp1)=d; if w>=0, sl(i-1,temp1)=1; end, if d>=0, sl(i-1,temp1)=1; end, end, end, end s=[sw,sd,sl]; %Coputation of b for i=2:m, for j=1:n, temp2=trellis next(i,j); if temp2==0 %transition to zero state tempbin5=de2bi(j-1); w=sum(tempbin5); bw(i-1,1)=w; tempbin6=de2bi(trellis out(i,j)); d=sum(tempbin6); bd(i-1,1)=d; if w>=0, bl(i-1,1)=1; end, if d>=0, bl(i-1,1)=1; end, end, end, end b=[bw,bd,bl]; %Distance spectrum and output spectrum for ii=1:len-2, [aw]=my mult1(aw,sw); % Multiplying a*s,(a*s, a*s*s, a*s*s*s etc depending on length) lef t[ ad right]=my mult1(ad,sd); lef t[alright]=my mult1(al,sl);lef t[asbwright]]=my mult2(aw,bw); % Multiply ’a s,a s2̂,... with ’b’ lef t[asbdright]=my mult2(ad,bd); [asbl]=my mult2(al,bl); if ii==1 % combining a s b, a s2̂ b,.... Tw=asbw; Td=asbd; Tl=asbl; else, Tw=[Tw asbw]; Td=[Td asbd]; Tl=[Tl asbl]; end, end T=[Tw;Td;Tl]; Td=T(2,:);% D’s are in second row of T fd=min(Td); end% end of function 17 subfunction my mult1 function [T1]=my mult1(a,s) lef t[sm,snright]=size(s); [am,an]=size(a); temp=an/sm;% crireria to decide how many elements (columns) of ’a’ multiply with one element of ’s’ p=1; T1=-ones(1,an*sm); for k=1:sm, for j=1:sn, for i=(j-1)*(temp)+1:j*temp if a(1,i)>=0& & s(j,k)>=0, T1(1,p)=a(1,i)+s(j,k); end, p=p+1, end, end, end, end subfunction my mult2 function [T]=my mult2(as,b) lef t[bm,bnright]=size(b); lef t[am,anright]=size(as); temp=an/bm;% crireria to decide how many elements(columns) of ’as’ multiply with one element of b p=1; T1=-ones(1,an); for j=1:bn, for i=(j-1)*(temp)+1:j*temp, if as(1,i)>=0& & b(j,1)>=0, T1(1,p)=as(1,i)+b(j,1); end, p=p+1, end, end % finally remove all ”-1’s” and get the values in new matrix q=1; for ii=1:an, if T1(1,ii)>0, T(1,q)=T1(1,ii); q=q+1; end, end 4.3 Finding Delay Spectrum(network delay and delay jitter) of a Network function [a,s,b,DS]=network(network,n1,n2,len) ND=network.delay; NJ=network.jitter; syms J D L s a b DS; lef t[m,nright]=size(ND); % generation of my delay.out and delay jitter.out matrices from network matrix t1=1; t2=1; for i=1:m, if (i=n2), ˜ for j=1:n, if(j =n1), d out(t1,t2)=ND(i,j); j out(t1,t2)=NJ(i,j); t2=t2+1; end, end, t1=t1+1; t2=1; end, end lef t[om,onright]=size(d out); lef t[jm,jnright]-=size(j out); % computation of direct path delay ’Dp’ and direct path delay jitter ’Dpj’ and ’a’ which is all path emerging from source node execpt direc path if (n1<n2)% if the source node is above the destination node in matrix (Row N0.(source)<Row No.(dest)) Dp(1,1)=d out(n1,n2-1);% Direct path delay from source to destination Dpj(1,1)=j out(n1,n2-1); if n2==n% if the dest node is the last node temp a=d out(n1,1:on-1); temp aj=j out(n1,1:jn-1); 18 else, temp a1=d out(n1,1:n2-2); temp a2=d out(n1,n2:on); temp a=[temp a1 temp a2]; temp aj1=j out(n1,1:n2-2); temp aj2=j out(n1,n2:jn); temp aj=[temp aj1 temp aj2]; end, else% if the source node is below the destination node in matrix(Row No.(src)¿Row No.(dest)) Dp=d out(n1-1,n2); Dpj=j out(n1-1,n2); if n2==1, temp a=d out(n1-1,2:on); temp aj=j out(n1-1,2:jn); else, temp a1=d out(n1-1,1:n2-1); temp a2=d out(n1-1,n2+1:on); temp a=[temp a1 temp a2]; temp aj1=j out(n1-1,1:n2-1); temp aj2=j out(n1-1,n2+1:jn); temp aj=[temp aj1 temp aj2]; end, end lef t[am,anright]=size(temp a); for i=1:am, for j=1:an, d=temp a(i,j); dj=temp aj(i,j); a(i,j)=Dd̂ Jd̂j L;% ’a’ containing delay and delay jitter from source node to all other nodes except destination end, end D p=DD̂p JD̂pj L; temp a % Computation of b i.e all path merging in destination node except direct path if(n1<n2), if n1==1 temp b=d out(2:om,n2-1); temp bj=j out(2:jm,n2-1); else, temp b1=d out(1:n1-1,n2-1); temp b2=d out(n1+1:om,n2-1); temp b=[temp b1;temp b2]; temp bj1=j out(1:n1-1,n2-1); temp bj2=j out(n1+1:jm,n2-1); temp bj=[temp bj1;temp bj2]; end else, if n1==n, temp b=d out(1:n1-2,n2); temp bj=j out(1:n1-2,n2); else, temp b1=d out(1:n1-2,n2); temp b2=d out(n1:om,n2); temp b=[temp b1;temp b2]; temp bj1=j out(1:n1-2,n2); temp bj2=j out(n1:jm,n2); temp bj=[temp bj1;temp bj2]; end, end lef t[bm,bnright]=size(temp b); for i=1:bm, for j=1:bn, d=temp b(i,j); dj=temp bj(i,j); b(i,j)=Dd̂ Jd̂j L; end, end % Computation of ’S’ if n1<n2 temp1=d out(1:n1-1,1:on); temp2=d out(n1+1:om,1:on); tempr=[temp1;temp2]; lef t[tmtnright]=size(tempr); temp3=tempr(1:tm,1:n2-2); temp4=tempr(1:tm,n2:tn); temp s=[temp3 temp4]; temp1j=j out(1:n1-1,1:jn); temp2j=j out(n1+1:jm,1:jn); temprj=[temp1j;temp2j]; lef t[tjm,tjnright]=size(temprj); temp3j=temprj(1:tjm,1:n22); temp4j=temprj(1:tjm,n2:tjn); temp sj=[temp3j temp4j]; else temp1=d out(1:n1-2,1:on); temp2=d out(n1:om,1:on); tempr=[temp1;temp2]; [tm,tn]=size(tempr); temp3=tempr(1:tm,1:n2-1); 19 temp4=tempr(1:tm,n2+1:tn); temp s=[temp3 temp4]; temp1j=j out(1:n1-1,1:jn); temp2j=j out(n1+1:jm,1:jn); temprj=[temp1j;temp2j]; [tjm,tjn]=size(temprj); temp3j=tempr(1:tjm,1:n2-2); temp4j=temprj(1:tjm,n2: temp sj=[temp3j temp4j]; end lef t[sm,snright]=size(temp s); for i=1:sm, for j=1:sn d=temp s(i,j); dj=temp sj(i,j); if(d==0 && dj==0), s(i,j)=0; else, s(i,j)=Dd̂ Jd̂j L; end, end, end % computation of delay spectrum DS=0; for i=2:len DS=DS+D p+a s ˆ(i-2)* b+a * b; end 20