NAVI-DRILL MOTOR
HANDBOOK
Ninth Edition
December, 2002
© Baker Hughes Incorporated, 2002
ALL RIGHTS RESERVED
The information contained herein is believed to be accurate and based on sound
engineering principles. However, Baker Hughes INTEQ makes no warranties or
representations to that effect. All such information is furnished “as is”, and use of
such information is entirely at the risk of the user. Unauthorized copying of the
information contained herein, including photographs and drawings, is prohibited
and subject to penalties under copyright and other laws of the United States and
other countries.
Preface
Since its introduction in 1975, the Navi-Drill® motor has established itself as the
industry standard for performance and reliability. Navi-Drill motors have
accumulated millions of drilling and circulating hours in thousands of directional
and horizontal wells worldwide.
Baker Hughes INTEQ introduced the Navi-Drill Ultra Series in 1995. These newgeneration tools still produce the most power and drill at the highest rates of
penetration in the industry.
The Navi-Drill Ultra Series was the first Baker Hughes INTEQ product to be
designed and manufactured using the Product Development and Management
Process (PDM), where inputs from customers, training and maintenance
personnel, systems engineers, and manufacturing experts were sought and
incorporated into the design specification. This produced a family of fit-forpurpose equipment and covered the full spectrum of our customers’ drilling
activities.
This ninth edition of the Navi-Drill Motor Handbook includes performance data
on the new motor generation—the Navi-Drill® X-treme® Series. A new
manufacturing process ensures that these performance motors provide 50 to 100%
higher torque compared to the Ultra Series motors.
Baker Hughes INTEQ Navi-Drill Motor Series
Navi-Drill
1975
Ultra Series
1995
X-treme Series
2002
As an essential step toward ensuring quality products, we implemented accredited
quality management systems throughout the facilities involved in producing our
motors. All Baker Hughes INTEQ manufacturing facilities have achieved ISO
9001 or Q1 certification.
This handbook also includes information about special applications and
configurations of the Navi-Drill motors and information on tools and services
provided by Baker Hughes INTEQ that incorporate Navi-Drill technology or
enhance Navi-Drill performance.
Table of Contents
PREFACE
TABLE OF CONTENTS
LIST OF FIGURES
Chapter 1 - INTRODUCTION TO NAVI-DRILL® MOTORS
Technical Basics ………………………………………………........
1- 1
Ultra Series Motors………………………………………………...
1- 3
X-treme Series Motors …………………………………………...
1- 4
Power Sections ……………………………………………………..
1- 4
Mach 1XL …………………………………………………………..
1- 5
Mach 1X ………………………………………………………........
1- 5
Mach 1XL-P ………………………………………………………..
1- 5
Mach 1X-P …………………………………………………….........
1- 6
Mach 1Xi-P (Intermediate Radius) ………………………….........
1- 6
Mach 1ADM (Air Drill Motor) …………………………………...
1- 6
Mach 1C ………………………………………………………........
1- 7
Mach 1P …………………………………………………………….
1- 7
Mach 2PXL ………………………………………………………...
1- 7
Mach 4XL ………………………………………………………….
1- 8
Mach 4XL-P ………………………………………………………..
1- 8
i
Temperature Capabilities …………………………………………
1- 8
Rotor Catching Device …………………………………………….
1- 9
Flow Rate Capabilities …………………………………………….
1- 9
Chapter 2 - APPLICATIONS AND CONFIGURATIONS
Steerable and Horizontal Drilling ………………………………...
2- 1
Standard Configuration ………………………………………........
Stabilization …….......…………………………………….
Drill-String Rotation ……………………………………..
2- 3
2- 4
2- 4
Medium and Intermediate Radius Configurations …………….......
2- 4
Thruster …………………………………………………………….
2- 5
Performance Drilling ………………………………………………
2- 6
Air and Foam Drilling ……………………………………………..
2- 7
Vertical Drilling ……………………………………………………
2- 8
Casing while Drilling ………………………………………………
2 -10
Hole Opening …………………………………………………........
2 -11
Re-entry Drilling …………………………………………………...
2 -11
Chapter 3 - OPERATIONS PLANNING
Drilling Fluid Overview …………………………………………...
3- 1
Drilling Fluid Types ……………………………………………….
3- 1
Water Based Fluids …………………………………………….......
Invert Emulsion Fluids …………………………………………….
Drill-In Fluids ………………………………………………….......
Highly Compressible Drilling Fluids…………………......
ii
3333-
2
2
2
3
Lost Circulating Material (LCM) ………………………………….
Sand Content (Abrasive Particles) ……………………………........
Solids …………………………………………………………........
Temperature / Fluid Effects ………………………………………..
Stator Elastomers ………………………………………...
Temperature Operating Range …………………………...
333333-
4
4
4
5
5
6
Dogleg Severity Capabilities ………………………………………
3- 6
DLS Capability …………………………………………………….
Deflection Device and Setting …………………………………......
Dogleg Severity (Build up Rate) Charts ……………………….......
3- 6
3- 6
3- 7
Stabilization ………………………………………………………...
3- 7
Rotor Nozzle Configuration ……………………………………….
3- 8
Special Operational Services ……………………………………...
3- 9
Reaming and Back-reaming ……………………………………….
Overpull and Jarring ……………………………………………….
Drilling Cement Float Equipment ……………………………........
3- 9
3- 9
3 -10
Equipment Options ………………………………………………..
3 -10
String Bypass Valve ……………………………………………….
Float Valve ………………………………………………………...
3 -10
3 -11
Chapter 4 - SOFTWARE
Drilling Application Software …………………………………….
GeoBUR ……………………………………………………….......
AKO Charts ………………………………………………………..
Thruster ……………………………………………………….........
Under-Balanced Drilling Utility ……………………………….......
Torque & Drag …………………………………………………….
Drilling System Hydraulics ………………………………………..
Compressible Fluid Flow (EC*TRAK) ………………………........
BHA Analysis (EC*TRAK) ……………………………………….
BHASYS ………………………………………………………......
BHASYSPro ……………………………………………………….
iii
4- 1
4444444444-
1
1
2
2
2
3
4
4
5
5
Appendix A - PERFORMANCE DATA SPECIFICATIONS
Ultra Series
2-7/8" M1ADM Ultra Series Motor ……………………………….
2-7/8" M2PXL Ultra Series Motor ………………………………...
3-1/8" M1X Ultra Series Motor ……………………………………
3-1/8" M1XL Ultra Series Motor ………………………………….
3-1/8" M1ADM Ultra Series Motor ……………………………….
3-3/4" M1XL Ultra Series Motor ………………………………….
4-3/4" M1X Ultra Series Motor ……………………………………
4-3/4" M1XL Ultra Series Motor ………………………………….
4-3/4" M1XL/RF Ultra Series Motor ……………………………...
4-3/4" M1ADM Ultra Series Motor ……………………………….
4-3/4" M1X-P Ultra Series Motor …………………………………
4-3/4" M1Xi-P Ultra Series Motor ………………………………...
4-3/4" M2PXL Ultra Series Motor ………………………………...
6-1/2" M1X Ultra Series Motor ……………………………………
6-1/2" M1XL Ultra Series Motor ………………………………….
6-1/2" M1ADM Ultra Series Motor ……………………………….
6-1/2" M1X-P Ultra Series Motor …………………………………
6-1/2" M2PXL Ultra Series Motor ………………………………...
6-3/4" M1X Ultra Series Motor ……………………………………
6-3/4" M1XL Ultra Series Motor ………………………………….
6-3/4" M1ADM Ultra Series Motor ……………………………….
6-3/4" M1X-P Ultra Series Motor …………………………………
6-3/4" M2PXL Ultra Series Motor ………………………………...
8" M1XL Ultra Series Motor ………………………………………
8" M1ADM Ultra Series Motor ……………………………………
9-1/2" M1XL Ultra Series Motor ………………………………….
9-1/2" M1ADM Ultra Series Motor ……………………………….
11-1/4" M1P Ultra Series Motor …………………………………..
12-3/4" M1P Ultra Series Motor …………………………………..
A- 1
A- 2
A- 3
A- 4
A- 5
A- 6
A- 7
A- 8
A- 9
A-10
A-11
A-12
A-13
A-14
A-15
A-16
A-17
A-18
A-19
A-20
A-21
A-22
A-23
A-24
A-25
A-26
A-27
A-28
A-29
X-treme Series
2-3/8" M1X-P X-tremeTM Motor …………………………………..
2-7/8" M1X-P X-tremeTM Motor …………………………………..
3-1/2" M1XL-P X-tremeTM Motor ………………………………...
3-1/2" M1Xi-P/LS X-tremeTM Motor ……………………………...
3-1/2" M1X-P/LS X-tremeTM Motor ………………………………
3-1/2" M2XL-P X-tremeTM Motor ………………………………...
4-3/4" M1XL-P X-tremeTM Motor ………………………………...
4-3/4" M4XL X-tremeTM Motor …………………………………...
6-3/4" M1XL-P X-tremeTM Motor ………………………………...
iv
A-30
A-31
A-32
A-33
A-34
A-35
A-36
A-37
A-38
X-treme Series - continued
6-3/4" M4XL-P X-tremeTM Motor ………………………………...
9-1/2" M1X-P X-tremeTM Motor …………………………………..
12-3/4" M1X-P X-tremeTM Motor …………………………………
A-39
A-40
A-41
Appendix B - NOZZLE SIZE CHARTS
Appendix C – ABBREVIATIONS
List of Figures
Figure 1 - Effect of Lobe Configuration on Torque and Speed …...
Figure 2 - Navi-Drill Motor Components ………………................
Figure 3 - Rotor Catching Device …………………………………
Figure 4 - Rotary vs. Oriented Drilling ……………………………
Figure 5 - Example for 3-Point Geometry …………………………
Figure 6 – Steerable Motor with Adjustable Kick Off Sub ………..
Figure 7 - Thruster Work Principle ……………………………......
Figure 8 - Typical Thruster BHA ……………………………….....
Figure 9 - VertiTrak System …………………………………….....
Figure 10- Drilling Liner …………………………………………...
Figure 11- Incompressible Drilling Fluids ………………………...
Figure 12- Bearing Housing and Clamp-On Stabilizer …………....
Figure 13- Bypass Valve Function ………………………………...
v
1- 2
1- 4
1- 9
2- 1
2- 2
2- 3
2- 5
2- 6
2 -8
2 -10
3- 3
3- 7
3 -10
Chapter
1
Introduction to Navi-Drill® Motors
Technical Basics
The Baker Hughes INTEQ Navi-Drill tool is a positive displacement motor
(PDM) used as a downhole drive in deep drilling operations. The motor employs
a reverse application of the pump principle first established by René Moineau in
which circulating drilling fluid is used to drive the drill bit independently of
drillstring rotation. The Moineau principle holds that a helical rotor with one or
more lobes will rotate when placed eccentrically inside a stator having one more
lobe than the rotor. The rotor and the stator form a series of sealed cavities so that
when drilling fluid is pumped into the tool the rotor will be driven in an eccentric,
rotary motion relative to the stator, allowing the fluid to pass while transmitting
rotational power to the drive train and bit. Torque and rotational outputs can be
varied by employing different rotor/stator lobe configurations. In general, more
torque will be generated by configurations employing greater numbers of lobes.
The output torque is proportional to the differential pressure across the power
section. Increased weight on bit (WOB) is seen on surface as increased standpipe
pressure. Maximum torque is limited by the mechanical strength of the stator
elastomer. This material must be rigid enough to withstand abrasion and wear
caused by solids in the drilling fluid but, at the same time, be sufficiently flexible
to provide a pressure seal between the rotor and the stator. As the length of the
power section and the number of lobes increase, the total chamber volume and the
torque output increase. A longer power section improves volumetric efficiency at
a slight cost in mechanical efficiency. Practical limits to power section length, and
thus overall tool length, are imposed by logistical and rig-site handling
difficulties, and by the need to incorporate the tool into a usable bottomhole
assembly (BHA).
Torque and rotational outputs can be varied by employing different rotor/stator
lobe configurations. In general, a higher number of lobes produce increased
torque and a lower number of lobes generate increased speed. Additionally,
rotational speed is proportional to the circulation or flow rate for a given lobe
configuration. The eccentric placement of the rotor in the stator causes the axis of
the rotor to rotate about the axis of the stator. This movement acts as a gear
reduction mechanism and causes bit speed to reduce as rotor/stator lobe
configuration increases. To center the eccentric rotor rotation, a titanium flex
shaft is employed below the rotor. The inner parts of the motor bearing assembly
include high performance axial and radial bearings.
1-1
600
8
500
6
400
300
4
200
2
Speed [rpm]
Torque [ft lb x 1000]
700
10
100
0
0
1/2
3/4
5/6
7/8
9/10
11/12
Motor Configuration
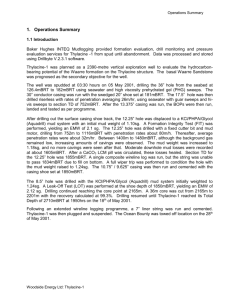
Basis for comparison:
Size – 6-3/4”, Flow rate – 475 GPM, Constant motor length,
Same number of stages, Same pressure drop across entire motor,
Same lobe geometry, Same efficiency.
Figure 1 – Effect of Lobe Configuration on Torque and Speed
Navi-Drill motors cover the full range of drilling operation requirements with
regard to tool size, bit speed, torque, and flow rate. The Navi-Drill motor operates
effectively with most types of drilling fluids in a wide range of fluid weights and
viscosities, including air, mist, and foam. Several types of elastomer are available
for the Navi-Drill fleet, depending on the temperature, the type of Navi-Drill
motor, and the drilling environment.
Special motor configurations can also reliably reproduce outstanding performance
in higher temperature environments. For example, Navi-Drill motors have an
excellent track record in the Austin Chalk in temperatures up to 420°F (215°C).
The common mud systems usually impose no general limitations but a
mud/elastomer test can be conducted in a questionable situation prior to making
the final elastomer selection. Baker Hughes INTEQ has a comprehensive database
with test results on most common and uncommon mud systems. Based on the
knowledge from the database, special precautions and motor configurations can
be used to enhance tool life expectancies. For closer review, please contact your
Baker Hughes INTEQ representative.
1-2
Ultra Series Motors
The Navi-Drill Ultra Series high performance, positive displacement motors
incorporate significant design enhancements to provide a new standard of drilling
performance. Compared to previous generations the Navi-Drill Ultra Series
delivers:
•
Increased reliability
•
Longer drilling runs
•
Greater horsepower and torque
•
Improved penetration rates
•
Improved temperature capabilities
Rugged Drive Train - The Navi-Drill Ultra Series drive train is built for long,
hard service. Each motor incorporates an industry-proven, rugged bearing
assembly, drive sub, and flex-shaft. The drive train has been thoroughly proven
over millions of hours of downhole service. This demonstrates that the higher
torque developed by the extended length XL power sections can be reliably
delivered to the bit over long drilling intervals and under the most demanding
conditions.
Stronger Connections and Higher Grade Materials - Upgraded connections
throughout the motor have twice the makeup torque ratings of previous
generation tools, preventing downhole backoff during tough and dynamic drilling
applications. These strengthened connections - along with higher-grade materials
in the drive train and power section - allow bending moments 150% higher than
previous designs, increasing motor reliability and drilling performance in both
straight and directional holes.
Improved Power Section - Navi-Drill Ultra Series motors are designed and
manufactured in-house with optimized rotor-stator (power) sections that improve
available fluid hydraulics, providing significant increases in horsepower and
torque at the bit. Navi-Drill Ultra Series motors equipped with optimized
extended-length (XL) power sections outperform, and are more reliable than,
previous dual-power section designs.
X-treme Power Technology - Some Ultra Motors incorporate portions of the
X-treme power technology, which is the latest development in downhole motor
technology. This technology uses pre-contoured steel stator tubes, which reduce
the amount of elastomer in the power section by up to 60%. The X-treme power
section handles increased differential pressures creating as much as 50 to 100%
higher torque above Ultra Series standards. On Ultra motors, X-treme technology
is used to shorten the power section for increased dogleg capabilities, while
maintaining the same power output.
1-3
Bearing Housing
Titanium Flex Shaft
Rotor Catching Device
Rotor Stator
Figure 2 – Navi-Drill Motor Components
X-treme Series Motors
Baker Hughes INTEQ X-treme Series
performance motors are the strongest since
the invention of downhole motors. They
were designed to maximize effective rate of
penetration (ROP) and increase dogleg
capabilities. Compared to the Ultra Series motors, the X-treme Series motors have
higher operating torque capabilities and power output.
X-treme motors include high torque M1XL-P power sections that are capable of
handling even most aggressive polycrystalline diamond compact (PDC) bits for
improved ROP while eliminating the risk of motor stalls. This is achieved by
using pre-contoured steel stator tubes coated with a thin layer of elastomer.
X-treme motors with high speed M4XL X-treme power sections are used with
impregnated bits.
Most X-treme Series motors use a different stabilization
concept than Ultra motors. Using a shorter steering head,
the stabilization on the X-treme motor is optimized to
ensure straight tangent drilling in the rotary mode and
high dogleg capabilities in the sliding mode.
Increased ROP very often requires an increased weight on
bit. To compensate for the additional loading, X-treme motors are equipped with
bearing assemblies, housing special ball or diamond bearings that provide
increased WOB capabilities.
Power Sections
Ultra Series and X-treme motors are available in a large variety of configurations,
covering the entire operational envelope in tool sizes from 2-3/8” up to 12-3/4”
and in various designs for high torque and high-speed applications to demonstrate
reliability in combination with all types of bits.
1-4
Mach 1XL
The Mach 1XL power section is one of the strongest
in the Ultra Series motor fleet. It provides, in each
available tool size, high torque at moderate rotational
speed and provides high performance in all parts of
the well path.
M1XL motors are typically used in straight-holes,
tangents, extended reach, and horizontal wells in
combination with rock or PDC bits.
5/6
Mach 1X
The Mach 1X power section is the short version of
the M1XL power section. It has fewer stages and,
therefore, provides less power and torque. The flow
rate and bit speed range are identical to the M1XL
power sections. Due to fewer stages, the M1X power
section is shorter and is used to drill higher dogleg
severities (DLS).
The main application is to build angle and to drill
ahead after passing curves that are too tight for the
M1XL power sections to pass through.
5/6
Mach 1XL-P
The M1XL-P power section (precontoured stator
tube) is designed for X-treme motors to cover high
torque performance applications. It maximizes
effective ROP in any high WOB or high Torque On
Bit (TOB) application by making use of aggressive
PDC bits. The use of this bit type is recommended to
deliver the extreme power to the formation.
The M1XL-P power section is generally applicable
in the same operations as the M1XL – straight hole
and tangent sections, extended reach drilling, or
horizontal extension applications that may require
extreme aggressive PDC bits.
1-5
5/6
Mach 1X-P
The M1X-P power section is shorter than the M1XLP. Although it has less power and less torque than
the XL-P version, it can be driven with the same
flow rate, and will provide the same rotational speed.
This power section is used with Ultra motors for
high ROP in performance markets that use higher
doglegs and delivers power comparable to the Ultra
Series M1XL. It may be used with low to moderate
aggressive PDC bits or roller cone bits.
5/6
Mach 1Xi-P (Intermediate Radius)
M1Xi-P motors are Baker Hughes INTEQ’s
intermediate radius motors for very high dogleg
severities. M1Xi-P power sections are available with
X-treme technology (precontoured stators tubes) and
deliver built rates up to 60°/100ft (30m).
The tools provide high torque, improved reliability
and a rugged design even under these drilling
conditions.
5/6
Mach 1ADM (Air Drill Motor)
Conventional downhole motors designed for use
with incompressible drilling fluids are not optimized
for use in air or foam drilling. For these applications,
Baker Hughes INTEQ has designed the Mach
1ADM which has a large chamber volume that
results in low bit speed even at elevated flow rates.
Relatively low pressure is required to generate
sufficient torque for drilling, reducing the need for a
booster compressor. Because of the low bit speeds,
these tools also have applications when using
conventional drilling fluids, especially when using
roller cone bits. The low speed is accompanied by
high torque output, allowing high WOB to be
applied.
1-6
7/8
Mach 1C
The Navi-Drill Mach 1C power section has a 5/6
lobe configuration. It is available in 11-1/4" size
only. It is characterized by its short length, moderate
speed, and high torque generation.
It is designed for directional and horizontal drilling
applications with roller cone or PDC bits.
5/6
Mach 1P
The Mach 1P is a high torque motor with a 9/10 lobe
configuration. These motors are offered in larger
sizes for low flow environments that require high
torque motors.
9/10
Mach 2PXL
In contrast to the Mach 1 power sections, the
M2PXL has a 2/3 rotor/stator lobe configuration.
This results in increased rotational speed with
reduced torque, providing the operational conditions
suitable for the use of high-performance fixed-cutter
bits such as PDC, TSP, or natural diamond bits.
The XL length makes the Mach 2PXL applicable for
straight hole, extended reach, or horizontal extension
wells.
2/3
1-7
Mach 4XL
Mach 4XL motors are ideally suited for
impregnated bit applications where high motor
speeds lead to optimum ROP. This motor features a
1/2 rotor/stator lobe configuration. M4 motors
cover the same bit speed range as turbines while
providing a higher torque.
It is available in most common tool sizes. The main
application is Performance Drilling in very hard
formations.
1/2
Mach 4XL-P
The Mach 4XL-P (preconfigured stator tube) also
features a 1/2 rotor/stator lobe configuration. It
delivers very high rotation speeds up to 1,250
revolutions per minute (RPM) with moderate
torque. The motors using M4XL-P power sections
are ideally suited for impregnated bit applications
where high motor speeds lead to optimum ROP.
This motor/bit combination is suitable for drilling
through very hard and abrasive formations.
The Mach 4XL-P covers the same bit speed range
as a turbine while providing much higher torque
and increased flexibility. The higher torque of the
M4XL-P at the same RPM range allows the use of
a higher WOB compared to a turbine, resulting in
higher ROPs.
1/2
Temperature Capabilities
Navi-Drill motors can be configured for air and fluid drilling in high temperature
environments. Temperature ratings of the power section are for standard
elastomeric formulations up to 265°F (130°C) and with special high temperature
elastomer up to 320°F (160°C). The new X-treme power sections allow further
temperature increases up to 320°F (160°C) with standard and 375°F (190°C) for
high temperature elastomers. Special rotor/stator configurations can be used to
sustain even higher temperature ranges. Baker Hughes INTEQ has extensive
experience with Navi-Drill motors in HT wells. Please contact your local service
representative for more details.
1-8
Rotor Catching Device
Every Navi-Drill motor is equipped with a rotor catching device that secures the
lower parts of the motor in case of a twist-off or back-off. The rotor catching
device includes a retainer rod with a mushroom shaped retaining disk that hangs
up on a stop ring inside the stator tube. The retaining disk retains all inner parts of
the motor and all outer parts below the back-off or twist-off, so that no fish
remains in the hole.
Elastomer
Figure 3 – Rotor Catching Device
Flow Rate Capabilities
INTEQ Navi-Drill motors are optimized for the fluid flow range specified in the
technical data sheets. The speed of the Navi-Drill motor is proportional to the
volume of fluid pumped through the power section. Some drilling applications
require the high flow rates that the motors usually handle but do not require the
associated bit speed that comes along with the high flow rates. For this reason,
some Navi-Drill motors allow the application of a rotor nozzle that bypasses the
power section with a portion of the fluid volume that correlates to the chosen
nozzle. This allows a tuning of the bit speed to lower revolutions per minute.
1-9
Chapter
2
Applications and Configurations
Steerable and Horizontal Drilling
A steerable motor system can alternate between two modes – oriented or rotary –
without having to trip out of the hole. In the oriented mode, without string
rotation, the system induces a predetermined wellbore curvature. In the rotary
mode with suppressed string rotation, the assembly can be configured either to
maintain a constant trajectory or to build or drop according to the needs of the
well plan. In general, these systems are capable of rotation through certain
doglegs depending on tool configuration and hole size.
Figure 4 - Rotary vs. Oriented Drilling
The outside diameters and placement of the stabilizers help determine the rotary
drilling characteristics. The assemblies can be designed to achieve build, hold, or
slight drop tendencies in rotary mode.
2-1
The dogleg capability in the oriented mode can be estimated by using a simple 3point geometry approach, neglecting bending and formation effects, or a more
complex analytical approach, resulting in results that are more accurate but
requiring special software and trained software users.
Figure 5 – Example for 3-Point Geometry
Figure 5 shows the basic concept of the three-point geometry approach for a
stabilized, bent housing, steerable system. In this example, the three points of
stabilization are the bit gauge, the Navi-Drill bearing housing stabilizer, and the
string stabilizer (or top stabilizer). The distances from the midpoint of the string
stabilizer to the midpoint of the bearing housing stabilizer (L1) and from the
bearing housing stabilizer to the bit gauge (L2), together with the effective angle
α define a reduced arc that represents the theoretical DLS capability of the
system.
The bit tilt angle α is the resulting angle between bit axis and a line through the
centers of the top and bottom stabilizers. The calculation is dependent on
assumptions regarding stabilizer gauge, hole gauge, and stiffness of the Navi-Drill
components. Advanced analytical software is available to calculate the theoretical
DLS for a specific BHA even more precisely by using a Finite Element approach
and considering the entire BHA and the wellpath.
Due to the high effort for each calculation, this procedure is only used for specific
applications. The 3-point geometry approach is generally the standard procedure
used to predict the dogleg severity of a tilted motor.
2-2
It is normal practice to configure a steerable system so that its DLS capability in
oriented mode slightly exceeds the maximum required in the well plan. This
allows for higher than planned doglegs to be drilled if it becomes necessary.
An obvious advantage of a steerable system is that the same steerable assembly
can be used in rotary mode for a tangent or horizontal section without the need for
a trip to change or adjust the BHA. Minor course adjustments can be made with
occasional oriented sections.
Steerable assemblies also are required where a hole section passes through a
variety of formation types that exhibit different rotary build or drop tendencies.
Short corrective sections drilled in oriented mode will keep the well path on
course.
Where long tangent sections or horizontal extensions are planned, the Adjustable
Kick Off Sub (AKO) setting should be kept as low as possible to minimize side
loading on the bit and the Navi-Drill bearing section, ensuring maximum service
life and optimizing hole quality.
Standard Configuration
The configuration of the tool is driven by the needs of the specific drilling
application and motor systems and should be planned to help optimize the drilling
process.
The AKO is the standard deflection device for all Navi-Drill motors. It is
positioned between the power section and the bearing assembly. The tilt angle of
the AKO can be adjusted on the rig floor. The AKO can be set to 0° for
applications that do not require steerability. For example, a 0° setting is used
when drilling out cement and casing float equipment.
Power
Section
Bearing
Assembly
Bit
Adjustable
Kick Off Sub
Figure 6 – Steerable Motor with Adjustable Kick Off Sub
Maximum AKO settings vary, especially with tool type, tool size and hole size.
Charts detailing the expected DLS capability for given AKO settings and rotating
limits are shown on the internet at www.bakerhughesdirect.com (after logging in,
select INTEQ > Engineer Toolbox).
2-3
Stabilization
The 3-point geometry determines directional behavior and wellbore curvature
when a Navi-Drill steerable system is used in the oriented mode. The stabilizer
blade width, profile, and hard facing material all contribute to successful steering
with minimal difficulty in transferring weight to the bit.
Additional stabilizers in the BHA will not necessarily improve steering
performance and may increase torque in the rotary mode and drag in the oriented
mode. Nevertheless, additional drilling assembly stabilization may be required to
improve buckling and dynamic stability and to assist in the centralization of
certain MWD formation evaluation modules.
Drill-String Rotation
The maximum allowable rotation speed is limited by the strength of the motor
components. The actual limit depends on the specific motor configuration. It is
defined for all common motor configurations and AKO angles on the internet at
www.bakerhughesdirect.com (after logging in, select INTEQ > Engineer
Toolbox). For certain configurations, no rotation is allowed beyond specified
AKO angles.
Rotation speeds should be selected after consideration of drill-string harmonic
vibration modes in order to avoid conditions where resonance may occur. Chapter
4 introduces BHASYSPro, a dynamic modeling tool.
Medium and Intermediate Radius Configurations
Ultra Series motors of the M1X group can be used to drill medium radius curves
to approximately 15°/100ft (30m). The exact limit varies with tool size and
configuration. Intermediate Radius Motors M1Xi-P are capable of drilling curves
up to a DLS of 60°/100ft (30m).
Compressive Service Non-Magnetic Drill Pipe (CSNMDP) can be used in place
of conventional non-magnetic drill collars in high build rate applications. Special
flexible MWD systems are available for use in combination with CSNMDP.
For detailed recommendations of Navi-Drill configurations for medium and
intermediate radius horizontal drilling applications, please contact your Baker
Hughes INTEQ Representative or Drilling Coordinator.
2-4
Thruster
Baker Hughes INTEQ’s Thruster drilling system efficiently maintains a constant
WOB, reduces downhole vibrations, and compensates for non-uniform axial
drillstring movements. These capabilities provide operators with:
•
improved ROP and extended bit life
•
enhanced steerability
•
fewer tool and string failures
•
increased maximum possible well displacement
The Thruster is a hydraulic cylinder with a piston. The drillstring and the Thruster
housing represent the cylinder, while the piston includes all the tools located
below the Thruster (i.e., bit, mud motor). The hydraulic force caused by the
pressure inside the cylinder acts on the piston, creating the thrust force.
Figure 7 – Thruster Work Principle
The thrust force depends on the cross sectional area of the piston and the
differential pressure between the piston and the annulus. Any tool or device
below the Thruster that creates a pressure drop contributes to the WOB.
The Thruster acts as an “anti-vibration” tool as long as it is kept in a floating
position. The thruster’s pump-open behavior decouples the lower part of the BHA
from the reminder of the drillstring, providing a constant WOB and a stable tool
face orientation. Simultaneously, the system dampens axial shocks and vibration
and compensates for uncontrolled axial string movements (i.e., during sliding
operations on long, horizontal sections).
Drillers derive maximum benefit from the Thruster by placing it as close to the bit
as possible. A Measurement While Drilling (MWD) tool may be placed between
the motor and the Thruster to provide near-bit directional and formation
evaluation (FE) measurements.
2-5
Figure 8 – Typical Thruster BHA
Performance Drilling
Performance drilling is defined as using an optimized integral BHA to increase
the overall ROP and save downhole drilling time in comparison to existing offset
wells. The overall ROP results from the systematic approach to tackle existing
problems with the right use of applicable Navi-Drill motors. The high performing
X-treme Series motors are applicable in vertical wells, build sections, and tangent
sections of directional wells or in horizontal well extensions.
The use of a high torque Navi-Drill motor enhances the drilling process in two
ways: first, by delivering a high level of continuous torque to the bit at a speed
that can be tailored to the formation and the type of bit being used; and second, by
isolating the bit from the most detrimental effects of torsional drill-string
vibration. These effects include erratic torque and speed, backward rotation, and
periods of no rotation, conditions generally referred to as “stick-slip.”
2-6
The full range of available bits—polycrystalline diamond compact (PDC),
thermally stable PDC (TSP), natural diamond, and Tricone—has its applications
in performance drilling. The use of an Ultra Series or X-treme Series motor
allows the bit to work in conditions for which it was designed.
Often the use of a highly aggressive PDC bit is preferred, since it allows higher
ROP and drilling hours compared to roller cone bits. However, the use of
aggressive bits may lead to difficulties in maintaining a stable toolface orientation
during oriented drilling operations. In those cases, the Baker Hughes INTEQ
Thruster tool helps solve the problem.
The complete system might include a Navi-Drill motor providing rotational
power and torsional shock absorption, an anti-whirl bit and a hydraulic thruster to
absorb axial movement and to generate a constant WOB.
It is important to consider the Navi-Drill/bit/thruster combination as a system
when designing the hydraulics program for the application. Advantage™ software
is available to optimize the setup of such a performance BHA. Baker Hughes
INTEQ has conducted numerous successful performance drilling programs for
different customers in various parts of the world, significantly improving ROP
and eliminating drill-string component failures.
The economic value of the Navi-Drill performance drilling option will include
various less tangible benefits such as reduced casing wear, reduced drill pipe
wear, and the cost savings associated with fewer trips.
For a detailed recommendation, please contact your Baker Hughes INTEQ
representative or Drilling Coordinator. A designated performance drilling group is
available to review and assist in optimizing your drilling program.
Air and Foam Drilling
Downhole motors were initially designed to be used with a conventional drilling
fluid. The fluid acts as a power source, provides lubrication, and dissipates the
heat from the motor. These motors have limitations when used with air, mist, or
foam as the circulating medium.
Much higher volumes have to be circulated to obtain adequate hole cleaning,
because of the lower drill cuttings lifting capacity of air, mist, and foam. These
high flow rates must be considered when selecting the downhole motor.
The M1ADM Ultra Series motor was specifically designed for air and foam
applications. It features significantly larger chamber volumes to allow higher flow
rates and to provide a lower rotational speed to reduce the risk of overspeeding
(i.e. when lifting off bottom).
Because of the compressibility of air, motor stalls are not signaled by an abrupt
increase in standpipe pressure as would be the case with conventional drilling
fluids, but are generally indicated by an immediate loss of ROP. Standpipe
pressure must be reduced before lifting off bottom to restart a stalled motor or
when a connection is to be made. Allowing the motor to run freely off bottom
2-7
may cause it to exceed its design speed limit and could lead to severe internal
damage. Some lubrication of the downhole motor, typically liquid soap, is
required to reduce friction and associated stator wear.
Air, foam, or mist drilling projects require special planning; please contact your
Baker Hughes INTEQ Representative or Drilling Coordinator.
Vertical Drilling
Baker Hughes INTEQ’s VertiTrak® system is the industry’s first automated
vertical drilling system. It delivers reliable deviation control in multiple
applications ranging from salt drilling to faulted zones and highly fractured
formations without compromising preferred drilling parameters.
Figure 9 - VertiTrak System
2-8
VertiTrak incorporates an X-treme high-performance power section and pad
steering technology from our proven AutoTrak system. Like AutoTrak, VertiTrak
is a downhole closed-loop system with two-way communication.
VertiTrak is the ideal system for drilling highly dipped formations and fault
zones, such as those encountered in mountainous areas. Other applications
include salt formations, which are extremely susceptible to deviation tendencies
when drilling with PDC bits, and lean casing profiles requiring precise wellbore
placement. The VertiTrak system is available to drill hole sizes ranging from 81/2" to 26".
The advanced VertiTrak system keeps the well absolutely vertical, reduces
wellbore stability problems, and increases the gross ROP. The VertiTrak system
is a downhole closed-loop steering system that continuously measures inclination
and generates the steering forces required to correct any deviation from vertical.
An integrated mud pulser transmits inclination and tool status information to the
surface.
Drilling a perfectly vertical well reduces torque and drag and improves wellbore
quality, facilitating more efficient lean casing profiles, and helping extend the
well’s horizontal reach. Compared to standard steerable motor assemblies,
VertiTrak systems reduce hole spiraling also.
Typically, the VertiTrak system operates in the sliding mode with the pads
engaged and bit rotation provided by a Navi-Drill X-treme power section.
Integrated, near-bit sensors measure hole inclination and pulse this data
continuously to the surface. Whenever the VertiTrak system’s near-bit
inclinometers detect the well path beginning to deviate from vertical, the control
sub activates internal hydraulic pumps. These pumps are engineered to deliver the
necessary force (up to 3 tons per pad) to each of the three steering pads counteracting any deviation tendencies and pushing the wellbore back to 0°
inclination.
The VertiTrak closed-loop system provides continuous, incremental course
corrections to ensure the wellpath remains straight with as little tortuosity as
possible. This reduces torque and drag, and minimizes the likelihood of twist-off
and stick/slip problems. As a result, the VertiTrak system helps control both BHA
and casing wear later.
Although VertiTrak typically drills in sliding mode, the pads generally can be
disengaged to permit rotary drilling and optimize penetration rates. The VertiTrak
system’s near-bit sensors continuously monitor and pulse inclination to the
surface while the tool is rotating. With disengaged pads, the even correction of
the wellpath is disabled as the pads are retracted into the housing to prevent them
from damage.
For more detailed information about the VertiTrak system, please contact your
Baker Hughes INTEQ Representative or Drilling Coordinator.
2-9
Casing while Drilling
Baker Hughes INTEQ’s innovative Drilling Liner system can drill and case a well
simultaneously. The system runs the liner while drilling and prevents hole
collapse caused by sudden pore pressure changes and/or formation instability.
A typical (reentry or new well) application for the Drilling Liner system is a
wellbore featuring a formation with high pore pressure followed by another layer
with significantly lower pressure (depleted reservoir). Normal drilling operations
usually run into trouble while drilling through the high pressure formation and
then drilling into the low pressure layer, as severe mud losses with simultaneous
hole collapse are the common result.
Further applications include drilling unconsolidated sands and drilling time
dependent unstable formations
With the Drilling Liner system, the liner will be set simultaneously when drilling
into the low pressure formation. Although the mud losses and the hole collapse
still occur, the liner is then already in place and protects the borehole. After
cementing and changing the mud, the regular drilling operation may resume in the
low pressure formation.
The Drilling Liner system is composed of an outer and an inner assembly.
Figure 10 – Drilling Liner
2 - 10
The inner assembly components include a pilot bit, male sub, motor and
Thruster. Field-proven Navi-Drill Ultra Series or X-treme motors deliver superior
cutting torque to the pilot bit. Retractable drive splines also transmit torque to the
outer assembly to ensure that the core bit and the pilot bit turn together.
The downhole Thruster above the motor compensates for the assembly’s varying
thermal expansions and leaves the liner in tension at all times.
The outer assembly components include a core bit, female sub, suspension, and
bearing sub. In addition to cutting action, the core head provides guidance for the
inner assembly’s pilot bit. The suspension and bearing sub provides longitudinal
length suspension and radial guidance – ensuring only the core bit and female sub
turn.
For detailed information about the Drilling Liner system, please contact your
Baker Hughes INTEQ Representative or Drilling Coordinator.
Hole Opening
The Ultra Series and the X-treme Series motors are ideal for hole opening
operations, as the additional cutting face requires higher torque to turn the
bit/reamer. Normally, a Ream While Drilling (RWD) bit is used that drills a pilot
hole and simultaneously opens the hole to the chosen size in one run. With special
design features, these bits are highly Steerable Ream While Drilling (SRWD) and
can achieve the same dogleg capabilities as standard bits.
Alternatively, the Ultra and X-treme Series systems can be used in conjunction
with string RWD tools, allowing the passage or drillout without rotation of the
underreamer in the casing or liner, which could cause damage to the completion
equipment or damage the casing shoe integrity.
Re-entry Drilling
Ultra Series and X-treme Series systems for re-entry work form part of the
complete Baker Hughes INTEQ Re-entry Technology package designed to extend
and increase production from mature fields. Available E-line Systems like
OrientXPress and CoilTrak systems can be used as well as rotary drilling BHAs
for TTRD re-entry applications. A wide variety of Ultra Series and X-treme
Series sizes and configurations have applications in re-entry wells, but smaller
tool sizes predominate. X-treme technology was implemented down to 2-3/8" and
2-7/8" tool sizes to eliminate the risk of motor stalling and to generate sufficient
torque/power at low flow rates. Thru tubing drilling is best when handled as a
system. Such a system requires an integrated BHA to drill a successful well.
2 - 11
Chapter
3
Operations Planning
Drilling Fluid Overview
All types of drilling fluids can be used with the Navi-Drill motor, although with
some reservations with regard to oil-base mud. Water-base systems with high
chlorides may pose some problems with regard to stress corrosion cracking in all
elements of the drill-string, including the Navi-Drill motor. The same applies for
acid gas influxes into the circulating system.
Cleaning the motor and flushing it with non-petroleum based lubricant can reduce
corrosion of motor components when the Navi-Drill motor is racked back or in
transit from the rig. Polymer drilling fluids help with lubricity and are attractive
fluids to use with the Navi-Drill motor as they allow good cuttings carrying
capacity with minimal solids content.
Oil-base fluids have the advantage of providing good lubricity, both internally in
reducing rotor/stator friction and motor bearing wear and externally in reducing
torque and drag. Their greater thermal stability also reduces fluctuations in
rheology at elevated temperatures.
Your Baker Hughes INTEQ Representative or Service Coordinator might
recommend mud / stator rubber compatibility tests. Baker Hughes INTEQ has
conducted extensive testing of the elastomeric reaction on worldwide existing
drilling fluids. This information is organized in a database for use in planning
processes. It might also be beneficial to utilize Baker Hughes INTEQ’s test
facility for pre-well fluid analysis if the reaction is unknown or highly reactive.
Drilling Fluid Types
There are three basic drilling fluids used throughout the world today:
•
Water based fluids (WBM)
•
Invert emulsion fluids—synthetic- or oil-based fluids (SBM/OBM)
•
Drill-in fluids
Fluids selection criteria include environmental constraints, borehole stability
issues, production zone integrity, and overall drilling costs.
3-1
Water Based Fluids
Water based fluids can be combinations of fresh water fluids to saturated salt
fluids, dispersed bentonite systems, or non-dispersed bentonite/polymer systems.
Various chemical additives are used to enable WBMs to drill reactive formations
efficiently. Some of the WBM systems Baker Hughes INTEQ Drilling Fluids
have available are AQUA-DRILL™ glycol system, Alplex® aluminum chemistry,
NEW-DRILL® partially-hydrolyzed polyacrylamide, and PYRO-DRILL® a
multiple co-polymer high temperature system. A typical deepwater water based
fluid would be a salt, PHPA NEW-DRILL® system. The PHPA is an encapsulator
to ensure the cuttings remain intact during removal. The salt adds density, aids
hydrate inhibition and gives the fluid shale inhibition characteristics. Hydrate
suppression additives such as NF2™ or NF3™ are added for additional protection
when required.
When selecting either a WBM or an OBM, not only is wellbore stability an issue,
but ROP and the lubricious characteristics of the two systems also play a role in
the fluid selection. However, there are additives for WBMs that are designed to
increase ROP and reduce torque and drag. Adding PENETREX®, Baker Hughes
INTEQ’s Drilling Fluids’ ROP enhancer, to a WBM system at 2 to 5% by volume
may substantially increase ROP and reduce torque and drag.
Invert Emulsion Fluids
Synthetic-based fluids and oil-based fluids are classified as invert emulsion fluids
if they contain a water/brine phase and “all oil” if there is no water phase. The
internal phase usually consists of calcium chloride brine with chlorides ranging
from 115,000 ppm to 160,000 ppm. Typical SBM/OBM fluids have oil to water
ratios ranging from 95:5 to 70:30.
The advantages of SBM/OBM include formation stability, increased ROP, gauge
hole, gas hydrate suppression, lubricity, reduced corrosion and, often, lower
overall well costs. Disadvantages include lost circulation (often more costly and
more severe compared to WBM), environmental concerns and elastomer
compatibility.
Various types of base fluids are used to formulate SBM. The SYN-TEQ® fluid is
Baker Hughes INTEQ’s Drilling Fluids’ original SBM. Formulations are made
with various hydrocarbon derivative base fluids including isomerized olefins,
linear alpha olefins, paraffins, and combinations of all of the above. Ester-based
SBMs are non-hydrocarbon derivatives and are more environmentally friendly.
NEXESSM and BIO-GREEN™ are the two ester-based systems supplied by Baker
Hughes INTEQ Drilling Fluids.
Drill-In Fluids
Drill-in fluids are used when protection of the production zone is desired. These
fluids are used mainly in cases where open hole completions such as gravel packs,
stand-alone screens, slotted liners and bare-foot completions are planned.
3-2
The PERFFLOW® fluid system is one of Baker Hughes INTEQ’s Drilling Fluids’
drill-in fluids. The system uses polymers for viscosity and fluid loss control and
incorporates sized calcium carbonate for bridging off the pore throats of the
production formation. The fluid loss additives and bridging agent are designed to
®
minimize fluid invasion and form an easily removable filter cake. PERFFLOW
systems can be made up with fresh water or a brine depending on fluid density
requirements.
Figure 11 – Incompressible Drilling Fluids
Highly Compressible Drilling Fluids
Highly compressible fluids are generally associated with underbalanced drilling.
They have densities ranging from 6.95 ppg, with back pressure, down to 0 ppg.
They are comprised of gasses, mists, foams, and aerated liquids with high gas to
liquid ratios. Conventional drilling motors are not designed for use in
compressible fluids and have problems including shortened life, stalling, and
runaway. INTEQ’s ADM incorporates a special design that employs much larger
chamber volumes to give lower output rotational speeds for a given flow rate and
lower pressure drops than conventional motors. This provides the advantages of
improved motor efficiency, fewer stalls versus conventional motors, and reduced
chances of overspeed. They can be used with the entire range of compressible
fluids and liquid drilling fluids as well.
3-3
Lost Circulating Material (LCM)
Navi-Drill motors can be used with common lost circulation material (LCM).
Some of the most common types of LCM in use today are sized and flaked
calcium carbonates, walnut hulls, cellophane, cellulosic material and mica. There
are three important parameters to consider: grain size, quantity per barrel, and
mixing preparation. LCM can lead to plugging of the inner fluid ways of the
Navi-Drill motor (e.g., bonnet ports). Circulation of the mud system and well
control can become impossible.
Recommendations for maximum LCM size are:
•
LCM less than or equal to 1/4" for motor sizes 4-3/4" and larger
•
LCM less than 3/16" for motor sizes 3-7/8" and 3-1/8"
There is also the influence of LCM abrasiveness on the motor, especially the
stator, to be taken into account. There is no definitive limit. In general, a mix of
18 lb/bbl is considered the maximum, whereas 13 lb/bbl is considered normal. As
long as the LCM fluid can be pumped with a centrifugal pump, no problems are
expected for the Navi-Drill motor.
Careful mixing of LCM is essential to avoid clogging the by-pass valve, bearing
assembly and possibly plugging the bit nozzles or fluid ways. Never “dump”
LCM into the mud pits at the pump intake, always use a premix tank for mixing
LCM.
Sand Content (Abrasive Particles)
Too high sand contents in the mud system will lead to high abrasive wear on the
stator and other Navi-Drill motor components. Therefore, for optimum motor life
expectancy, sand content should be no more than a trace as determined by the
American Petroleum Institute (API) sand content test.
Always use centrifuges or equivalent at the rig site to reduce the sand content.
The abrasive property of sand is dependent on the grain form, grain size and grain
sharpness. Field experience has indicated that acceptable motor life can be
attained in most cases with API sand contents up to 1%. With more than 1%, a
reduction of Navi-Drill motor life has to be expected. Other particles (e.g., scale
or corrosion particles from the inner surface of the string or coil) can be very
abrasive and must be avoided. Tool failures (totally worn stators after very few
operating hours) can be caused by these particles.
Solids
The solids content in the mud is dependent on the required mud system, density,
and operating conditions. Solids usually should not contain abrasive particles.
Systems with high solids content do not necessarily lead to increased wear of
motor and other components, as long as the particles are not too abrasive.
3-4
The low gravity solids (LGS), such as bentonite, polymers, and drill solids,
should be less than 7% by volume, otherwise they can cause the fluid paths in the
bearing assembly to “block off” and starve the bearing assembly of passing any
fluid, resulting in bearing assembly failure. Solids control equipment should be
kept in good working order.
Temperature / Fluid Effects
The selection of the appropriate power section depends on a variety of factors,
e.g., downhole temperature, type of mud or chemical compounds. It is possible to
use undersized rotors or oversized stators to achieve a customized rotor/stator fit.
By selecting a loose fit, the power section is allowed to swell while maintaining
its performance.
In addition, there are several elastomer types and different rotor coatings available
that are used for different applications.
Your Baker Hughes INTEQ Representative or Service Coordinator will
recommend the suitable solution for any application.
Stator Elastomers
The effects of different drilling fluids and fluid additives on Navi-Drill stator
elastomers is the subject of continuous investigation at Baker Hughes INTEQ’s
Drilling Systems Engineering Departments in Celle, Germany and in Houston,
Texas. Detailed records of drilling fluid effects on various types of elastomer
compounds are filed in a database.
The main concerns are synthetic-base drilling fluids (e.g., ester oils) and mineral
oil-base (e.g., diesel oil) muds. The elastomers typically used for Navi-Drill stator
linings are based on high-grade synthetic nitriles that exhibit good resistance to
synthetic oil-base and water-base drilling fluids
The interaction between elastomer and drilling fluid can lead to swelling and loss
of physical properties, e.g., hardness or elongation. Also, shrinkage (leading to an
increased hardness) is observed sometimes. Swelling will increase the rotor stator
interference and cause a higher strain and heat build-up in the elastometer. This
increased specific loading of the elastomer finally leads to “chunking” - cracks
and a fracture of the stator elastomer.
Diesel-based drilling fluids have been, to a large extent, displaced by low toxicity
mineral oils or synthetic fluids. Although the synthetics usually contain no
aromatics, they often have an adverse effect on stator elastomers. Pre-job testing
of drilling fluid and elastomer compatibility is recommended where no previous
experience (see BHI-database) has been logged. This service can be provided on
request by our in-house laboratory.
3-5
Temperature Operating Range
Standard Ultra stator elastomers are rated to 265°F (130°C); special high
temperature elastomers rated to 320°F (160°C) are available for both oil- and
water-base drilling fluids.
The Navi-Drill Mach 1ADM is specially suited for high temperature applications
using conventional drilling fluids (rather than the air/foam for which it was
originally designed). The large chamber volume and the rotor profile of this
motor exert the least stress on the stator elastomer of any Navi-Drill motor.
Therefore, its use is recommended in hot-hole environments where very low bit
speed is acceptable.
Due to the reduced amount of elastomer, X-treme stators are also very suitable for
HT applications. The standard types are rated to 320°F (160°C). Special hightemperature units are rated to 374°F (190°C) for both oil- and water-base drilling
fluids.
Dogleg Severity Capabilities
DLS Capability
Steerable systems based on the Navi-Drill motor are dual-purpose: they are able
to initiate and propagate wellbore deviation when used in the oriented mode (no
drillstring rotation); and when rotated, they will drill ahead in much the same
way as a conventional rotary assembly with increased performance due to the
increased power at the bit.
Deflection Device and Setting
The choice of tool and its configuration will depend on what the BHA is expected
to achieve. If the run is planned to kick-off the well from vertical or to initiate a
sidetrack, an AKO setting towards the upper range of its adjustability is
commonly used. The selected AKO setting should be able to generate a slightly
greater dogleg severity than that specified in the well plan. This will allow the
directional driller to meet the directional plan requirements if actual hole
curvature is less than predicted.
It should be noted that the theoretical dogleg severity assumes that toolface
orientation is constant, while in practice it will fluctuate to a certain degree,
especially when using PDC bits on high torque tools. If the Navi-Drill motor is
required to drill a vertical, tangent, or horizontal section with a constant
trajectory, it will generally be configured with a low AKO setting. This allows for
improved drilling performance and lower stress on the tool and bit while still
allowing minor course corrections to be made without the need to trip the
assembly.
3-6
Your Baker Hughes INTEQ Representative or Operations Coordinator can give
advice on the expected performance of any particular tool size, hole size, and
drilling parameter combination.
Dogleg Severity (Build up Rate) Charts
Build up rate (BUR) charts predict the dogleg severity of fully stabilized, partially
stabilized, or unstabilized (slick) Navi-Drill assemblies in the oriented mode
depending on the AKO setting. In addition to the expected dogleg capability, the
charts show the maximum allowable drillstring rotation in normal drilling
conditions. A chart library of possible combinations of motor type and size, hole
size, and stabilization is available on www.bakerhughesdirect.com (after logging
in, select INTEQ > Engineer Toolbox).
Stabilization
Stabilizers for steerable systems are usually slightly undergauged to allow
efficient weight transfer to the bit and to minimize weight-stacking on the
stabilizers. The bearing housing stabilizer has a similar function to the near-bit
stabilizer of a conventional rotary assembly. Experience has shown that the string
stabilizer, most commonly run immediately above the Navi-Drill motor, should
be under-gauged so the assembly has an angle hold tendency in rotary mode.
Figure 12 - Bearing Housing and Clamp-On Stabilizer
The length, width, and profile of the blades for both the bearing housing and the
string stabilizer can make a significant difference in the steerability of the
assembly. Generally, the blades will be straight, relatively short, and profiled with
smooth tapers at the top and bottom of the blades.
The hardfacing material is also important and should be as smooth as possible on
the surface to reduce sliding friction when the Navi-Drill motor is used in the
oriented mode. In addition, a near bit reamer can be used. Near bit reamers are
stabilizers with cutting elements on the front edges of their blades. They are run
between the bit and the mud motor. Near bit reamers are shorter than
3-7
conventional stabilizers to minimize the bending loads on the bearing section of
the mud motor in curved hole sections during directional drilling operations.
Due to the additional guidance of the reamer blades, hole spiralling is reduced to a
minimum and the borehole is kept in gauge. The cutting elements on the blades
smooth the borehole walls by removing possible edges and offsets. The outer
diameter of a near bit reamer typically is 1/32" to 1/16" under-gauge compared to
the bit size, which ensures smooth sliding of the BHA even in curved borehole
sections. The smoother wellpath enables easier sliding of the string and avoids
hanging up of the BHA. Both effects result in steadier WOB with reduced peak
loads on the BHA.
Your Baker Hughes INTEQ Representative or Service Coordinator will
recommend optimal stabilizer configurations.
Rotor Nozzle Configuration
Some of the Navi-Drill motors allow the application of a rotor nozzle to increase
the flow rate through the motor without increasing the bit speed at the same time
or to reduce the pressure loads in case of a motor stall.
The maximum flow rate for a specific motor is given in the motor specifications
and is driven by the following limitations:
•
Increase in flow beyond specified maximum differential pressure and
flow may lead to washouts on the internal parts of the motor.
•
With higher flow, the rotor (motor) speed will also increase above
motor specifications so that higher wear and tear is expected in all parts.
•
As the installation of a rotor nozzle will separate the total flow only in
the power section, the use of a rotor nozzle will not increase the
specified total flow rate range of the motor.
Another advantage of using rotor nozzles is that no additional float equipment is
needed when the motor is tripped in/out the hole. Today’s high performance
motors with the tight fit between the rotor and the stator will act as a valve and
avoid drillstring fill up (or drain out) if the BHA is tripped in or when pulling out
of hole (POOH).
In these cases, “String Bypass Valves” may be used to allow fluid communication
between the annulus and the string. If a rotor nozzle is used, sufficient flow is
ensured and a String Bypass Valve might not be needed. Once the rotor is
equipped with a nozzle, the hydraulic power of the motor is reduced by the
bypassed fluid energy resulting in a reduced motor performance.
If substantially more flow rate is needed the use of an additional circulation sub
on top of the motor should be considered.
Charts will help to determine the optimum nozzle size for each application. See
Appendix B, APPENDIX B: Nozzle Size Charts. A vertical line is drawn
3-8
upwards from the expected operating differential pressure to the actual mud
weight curve. From there a horizontal line is drawn to the intersection with the
curve of the required nozzle. A vertical line from there will result in the achieved
bypass flow rate.
A manual calculation can also be done. Based on the differential pressure across
the motor (on and off bottom), the volume of bypassed fluid can be estimated
with the following equation:
V 2 bypass * ρ
An =
∆p * K
Units1*
Units2*
An
Rotor Nozzle Flow Area
[in2]
[in2]
Vbypass
Bypassed volume of flow
[gpm]
[lpm]
ρ
Mud Weight in
[ppg]
[kg/l]
∆p
Differential pressure of the motor
on/off bottom
Conversion Factor (depending on
set of units 1 or 2)
[psi]
[bar]
10858
283750
K
•
Use EITHER Units 1 or Units 2; do not mix them for calculation.
Special Operational Services
Every tool of Baker Hughes INTEQ’s Navi-Drill fleet is capable of providing the
following services. For handling procedures, technical details and safety issues,
please refer to the operations manual.
Reaming and Back-reaming
The necessity of Reaming or Back-reaming may occur during any drilling
operation. The Navi-Drill Tools are designed to withstand the extra loads of
Reaming or Back-reaming operations.
Overpull and Jarring
Should the drillstring become stuck in the course of operations, overpull and
jarring operations are considered a solution to eliminate the sticking problem.
Every tool in the Navi-Drill fleet can withstand the extreme high load and impact
needed during the freeing operation.
For technical details, please contact your Baker Hughes INTEQ Representative or
Service Coordinator.
3-9
Drilling Cement Float Equipment
Float equipment can be drilled with Navi-Drill motors equipped with deflection
devices, but extra caution should be exercised. Drillstring rotation should be
limited to 20 to 40 RPM and the Navi-Drill unit run at a low differential pressure.
Spudding with the Navi-Drill assembly to remove or break up the plug, float, or
shoe is not recommended. Special care should be taken with PDC bits to prevent
premature damage.
Equipment Options
String Bypass Valve
In the event a Navi-Drill assembly is run without a bypass nozzle in the rotor, a
string bypass valve can be run above the motor. This allows the drillstring to fill
when tripping in and for drilling fluid to drain from the string when tripping out.
With no circulation, a spring holds the bypass piston in the open position,
exposing the ports to the annulus and allowing drilling fluid to flow into or out of
the drillstring. At approximately 30% of the maximum recommended flow rate,
the bypass piston is forced down, closing the ports and circulating the fluid
through the Navi-Drill power section and bearings. When circulation is stopped,
the return spring restores the piston to the open position.
.
Figure 13 - Bypass Valve Function
3 - 10
Float Valve
A float valve run directly above the power section will avoid plugging of the bit
and motor while tripping in the hole. It is especially recommended when milling
steel, drilling under-balanced, or when drilling in very unconsolidated formations.
3 - 11
Chapter
4
Software
Drilling Application Software
Drilling optimization when using motors often requires a detailed analysis of
drilling program objectives and applications (e.g., mud vs. compressible fluids)
and the capability of other drilling system components such as Thrusters or near
bit reamer. Major elements of the planning process that relate to the choice and
use of the appropriate motor configuration are described below.
GeoBUR
This program determines theoretical steady-state wellbore curvatures that would
be established with AKO adjusted drilling motors as a function of general 3-point
geometry motor conformation, high- or low-side toolface orientation, and radialbearing clearance.
AKO Charts
Charts showing the predicted build rates or dogleg severities for various tool
configurations and sizes are available from the AKO Charts application, which is
embedded in INTEQ’s Advantage software platform. These charts are theoretical
data generated from computer modeling of the motor components. Actual drilling
conditions or variants of configurations may cause offsets from predicted
performance. Advantage also offers an application called GeoBUR that provides
Geometric Build-Up Rate calculations for configurations not published on
www.bakerhughesdirect.com (after logging in, select INTEQ > Engineer
Toolbox). The BHA Analysis or BHASYSPro software application is available to
study other directional performance effects such as bit type, bending, or formation
influences. The AKO Chart application also provides drilling performance data
for motor systems in terms of torque, power, and bit speed for their flow rate
ranges.
4-1
Thruster
The Thruster program is used to calculate the operating point (WOB range) of a
BHA containing a Bit-Motor-Thruster system as a function of mud weight and
flow rate. It can be used to optimize such a hydraulic system by comparing
different BHA configurations and drilling conditions with one another. Warnings
are given out for certain configurations or drilling conditions when operational
problems can be expected. It is strongly recommended to run the Thruster
program prior to any Thruster application.
Under-Balanced Drilling Utility
The Under-Balanced Drilling Utility is used to calculate the effective motor flow
rate for two-phase flow based on fluid data, motor characteristics, and operating
conditions. Two general calculation modes are available:
•
Effective Flow Rates Through Motor - Calculates the effective flow rate
of the two-phase mixture through the motor. The calculation is done for
No-Load pressure drop (bit off bottom), operating pressure drop, and
maximum pressure drop of the motor while on bottom.
•
Maximum Allowed Gas Flow Rates - This calculation determines the
maximum allowed gas flow rate that can be pumped without exceeding
the motor flow rate limits. The gas flow rates are reported at standard
conditions. The calculation is done for No-Load pressure drop (bit off
bottom), operating pressure drop, and maximum pressure drop of the
motor while on bottom.
Torque & Drag
A flexible and sophisticated analytical tool, Torque & Drag is used to conduct
comprehensive engineering assessments of drillstring load, drillstring stress, and
drillstring/wellbore contact-load problems commonly associated with directional
drilling operations. Calculation modes are provided for four distinctly different
problem-solving architectures:
•
The Torque & Drag calculation mode provides complete surface-to-bit
load, stress, and contact load information for rotary or non-rotary
(oriented) drilling operations at a user-specified measured depth. A onepage summary report provides key surface-load information, such as
hook load and rotary torque, for all operating load cases, as well as the
magnitude, location, and mode of occurrence (e.g., drilling, slack-off,
etc.) for maximum values of combined (von Mises), axial, torsional,
and bending stress. The reports include warning messages for yield,
buckling, and fatigue when appropriate. Detailed surface-to-bit reports
4-2
give comprehensive load, stress, normal load, and safety factor
information on thirty-foot (ten-meter) stations.
•
The Friction Factor calculation mode enables analytical inference of
cased and open hole drillstring/wellbore friction factors from observed
hook load and rotary torque data. Furthermore, this calculation mode
enables the user to determine Bit Overpull and Bit Drag forces in case
the corresponding observed surface loads and friction factors along the
wellpath are specified.
•
Bit Drag/Overpull Force calculation mode enables the user to
determine bit overpull and bit drag forces (for example, Swab and
Surge forces) in case the corresponding observed surface loads and
friction factors along the wellpath are specified.
•
The Depth In/Depth Out calculation mode provides a means for
evaluating key drillstring operating loads as well as casing wallthickness attrition over the course of drilling a user-specified interval.
This calculation mode also can be used to evaluate the progressive
onset of drillstring or coiled tubing lockup due to advanced helical
buckling.
•
Weight-on-Bit calculation mode reverses the drill-bit-to-surface solution
process employed in the Torque & Drag, Friction Factor and Depth
In/Depth Out calculation modes. It enables direct evaluation of drill bit
or other downhole tool loading for coiled tubing or other drilling and
non-drilling applications where gravity-aided load transfer may be
inadequate and where supplemental thrust loads must be provided by
means of a surface injector head or snubbing system to achieve required
axial loads at total depth.
Drilling System Hydraulics
This is a multi-functional analytical tool for solving system hydraulics, hydraulics
optimization, temperature and/or pressure influence (including HTHP) and
cuttings transport problems related to circulation of incompressible Newtonian
and non-Newtonian fluids in oilfield drilling applications. The user can select
from four general solution architectures:
•
The Spreadsheet Hydraulics calculation mode provides detailed
pressure loss and hydraulic parameter data for complex circulating
systems over a user-specified range of uniformly incremented
circulation rates.
•
System Mud Hydraulics runs the analysis for the operating flow rate.
The emphasis is on the details of the wellbore system hydraulics with
respect to pressure drop, flow regime, local ECD, and annular velocity.
•
The Optimized Hydraulics (Calculated) calculation mode provides
system circulation rate, detailed pressure loss, drill bit nozzle or flow
4-3
area, and optimization objective function solutions for maximum
specific hydraulic horsepower or impact force at the drill bit. This
optimization solution determines the minimum circulation rate for
satisfactory cuttings transport.
•
The Optimized Hydraulics (Rigsite) calculation mode provides a means
whereby rig site observations of circulating system pressure losses at
several circulation rates can be employed to forecast optimum drill bit
nozzle or flow area selections for each drill bit run such that specific
hydraulic horsepower or impact force will be maximized.
Compressible Fluid Flow (EC*TRAK)
EC*TRAK is a program for analyzing drilling hydraulics problems associated
with multi-phase compressible fluids, including wellbore inflow and drill cuttings
transport. The program covers four main applications of drilling with multi-phase
fluids. Particular consideration is in the downhole motor performance.
•
The Two-Phase Fluid calculation mode provides detailed pressure loss
and hydraulic parameter data for circulating the gas/liquid mixture
through drillstring and annulus.
•
The Mud with Gas Injection calculation mode combines conventional
mud hydraulics with multi-phase flow in the annulus. This mode is
effective in analyzing the influence of gas injection through a parasitic
string or through the casing on the bottomhole pressure.
•
The Foam calculation mode uses a specific viscosity correlation to
characterize the rheology of a mixture of liquid and gas with an additive
to analyze the flow through the drillstring and annulus.
•
The Air Drilling mode is for the analysis of drilling with pure gas.
BHA Analysis (EC*TRAK)
A structural analysis and predictive performance assessment tool, EC*TRAK
facilitates studying the nature of large-scale drilling assembly deformation during
drilling. EC*TRAK can predict the effect of drilling assembly deformation on
static drilling assembly wall contact loads and, in combination with drill bit and
formation influences, on directional drilling behavior. Two basic calculation
modes are provided:
•
The Compute Static Results calculation mode provides static structural
analysis of a user-defined drilling assembly in wellbores of arbitrary
3-D spatial configuration. Computed results include orthogonal verticalplane and lateral normal loads at all points of drilling assembly or drill
bit contact with the wellbore, resultant force and direction vector for
reactions at the drill bit, and MWD housing misalignment with respect
to the wellbore centerline axis. The static structural analysis further
provides information on lateral and angular deflection, radial clearance,
4-4
bending moment, axial bending, and combined stress distributions
along the BHA.
•
The Predict Well Path calculation mode provides a “drill ahead”
prediction of drilling assembly directional performance in the form of a
pseudo-survey file that progressively describes the drilling trajectory
propagation over a user-specified course length, including dogleg
severity in build and turn planes. Drill-ahead predictions can be made
for conventional rotary drilling assemblies as well as drilling motor or
turbine assemblies in both oriented and rotary operations.
BHASYS
BHASYS is a software program that models the tendency of a BHA and
drillstring to deform axially, torsionally, or laterally.
When the RPM of a rotating drillstring matches any one of the natural bending,
axial, or torsional frequencies of the drillstring, one or more sections of the
drillstring will have a tendency to whirl laterally or vibrate axially or torsionally
with continuously increasing amplitudes.
This deformation of the drillstring in the lateral, axial, or torsional direction (also
called mode shapes) is different for each natural frequency.
This program provides information on natural frequencies and their associated
mode shapes and bending stresses in various sections of the drillstring. It also
computes the buckling load and buckled mode shape.
BHASYSPro
While BHASYS focuses on Critical Speeds Analysis to aid drilling operations
select which operating parameters to run, during in-depth engineering studies
more extensive dynamics analysis of BHA components is often needed. For these
cases, BHASYSPro provides the skilled engineer with a versatile software tool
for investigating the dynamic performance of BHA components.
BHASYSPro builds on the same user interface used in BHASYS, but focuses on
full finite element analysis of a complex drillstring in a curved wellbore.
With BHASYSPro, the user can add BHA or drillstring components in exact
detail, model complex BHA components, or study the dynamic or static response
of the drillstring to a change in MWD tool design. BHASYSPro has also been
validated with downhole measurements, and uses state-of-the-art 3D graphics to
render complex engineering analyses.
4-5
Appendix
A
APPENDIX A: Performance Data Specifications
The following pages list the General Tool Specifications, Performance Data, and
Operational Data for the most common Baker Hughes INTEQ Navi-Drill
motors.
The General Tool Specifications include the most important geometrical
dimensions. These include the length, weight, and connections. The stated outer
diameter of the tool (Max. OD) is dependent on the type of motor. In all cases, the
quoted number refers to an un-stabilized motor and the listed number refers to the
part that represents the maximum OD, i.e. the wear pad of the adjustable kick-off
housing.
The characteristics of a positive displacement motor (PDM) are a function of the
design of the stator/rotor geometry. The available torque and rotational speed
depend on the pitch angle and the number of lobes in the stator and rotor.
The original PDM design was the 1/2 lobe, which worked well with natural and
synthetic diamond bits, but rotated too fast for roller cone bits. As a result, low
speed, high performance PDMs were developed with multi-lobe configurations.
With a multi-lobe system, the relationship between speed and torque is changed
with the number of lobes. The stator/rotor geometry dictates that a helicoidal steel
rotor with one or more lobes is placed inside a stator having one more lobe than
the rotor. The rotor/stator or lobe configuration is written with a slash between the
two numbers: 1/2, 3/4, 5/6, 7/8, or 9/10.
The Performance Data depend on this lobe configuration. The technical
information quotes operating parameters unless otherwise stated.
The flow rate range gives the operating envelope in which the motor will run
efficient and optimized. This flow rate range results in the stated speed range that
is directly related to the driving flow rate, the lobe configuration and the resulting
chamber volume. Baker Hughes INTEQ chooses one operating point of the motor
to quote the operating parameters. This means that the stated operating
differential pressure relates to the operating torque at the operating flow rate with
the resulting speed.
A-i
Helpful Definitions:
Flow Rate
Specified mud flow range through the power section of the
motor
Maximum
differential
pressure
Differential pressure, which can be applied only for short
intervals without accelerated wear/damage
Maximum
torque
Torque at the bit at maximum differential pressure across the
power section
No-load
pressure
(off-bottom) differential pressure, which is required to
overcome internal friction and pressure losses of the motor
Operating
Differential
Pressure
Nominal differential pressure across the power section during
optimum operation
Operating
Torque
Torque at the bit at operating differential pressure across
power section
Power output
Mechanical horsepower at nominal differential pressure and
maximum flow rate
Speed
Bit speed range, relating to flow rate. The minimum bit speed
is achieved at minimum and max bit speed at maximum
specified flow rate.
The mechanical horsepower output of a motor is defined as:
HPout =
T ×n
5252
HPout
HPin
T
dp
Q
n
ηtotal
[hp]
[hp]
[ft-lbs]
[psi]
[gpm]
[RPM]
[%]
mech. horsepower output
hydr. horsepower input
Operating Torque
Operating differential Pressure
Flow Rate
Speed
efficiency of entire PDM
And the input horsepower is defined by the differential pressure and the flow rate:
dp × Q
1714
HPin =
Example: 6-3/4” M1XL-P X-treme Motor (see page A-38)
HPout =
HPin =
8670 ft .lbs × 220 rpm
= 363 HP
5252
1305 psi × 660 gpm
= 503 HP
1714
A - ii
The overall PDM efficiency is defined as a relation of output and input
horsepower:
ηtotal =
HPout 363HP
=
= 0.72 = 72%
HPin 503HP
Volumetric and mechanical efficiencies are a function of the flow rate, pressure,
temperature, lobe configuration, stator/rotor fit, mud properties, surface
conditions, and hard facing of the rotor along with other influences. Efficiencies
are per definition always less than 100%.
The stated power output for the motors listed here always refers to the operating
data and not to the maximum possible power output.
The no load pressure is the differential pressure across a motor that occurs as it is
operated without any torque at the bit (“off bottom differential pressure”). It
represents the internal mechanical friction and leakage flow of the motor. The noload pressure is mainly dependent on the rotor/stator fit of the power section and
on the flow rate. Higher compression fit or higher flow rate result in higher noload pressure. The no load pressure is quoted for the middle of the motor’s flow
rate range.
Some rotors incorporate an axial bore. These motors allow the use of a rotor
nozzle. This can be used to bypass fluid through the motor without performing
work but the stated maximum flow rate must not be exceeded.
Baker Hughes INTEQ’s M1ADM motors can also be operated with compressible
fluids, such as air, foam, or gas. When operated with incompressible fluid, the
PDM’s speed is directly proportional to the flow rate. When operated with
compressible fluids or gas, the speed also depends on the differential pressure
across the power section. The speed decreases with increasing differential
pressure. In the data sheets, the performance data for incompressible drilling
fluids is given in addition to the performance data for mud. For the operating flow
rate a speed range is given. The maximum value is achieved under no-load; the
minimum speed will be achieved under operating differential pressure.
In the Operational Data section, some environmental values are listed. Operating
WOB relates to a safely operable weight on bit. The motor can be operated over
the entire length of the run at this load condition.
The maximum WOB should not be exceeded without expecting increased risks of
failure or severe damage to the tool.
The deflection device, the AKO, is adjustable within the given range. These
values are predetermined and displayed in AKO charts. AKO charts can be found
on www.bakerhughesdirect.com (after logging in, select INTEQ > Engineer
Toolbox), or obtained from the local Baker Hughes INTEQ service representative.
A - iii
There are usually no mud type limitations because of the long and extensive
experience with all kind of drilling fluids. Together with the temperature quoted
in the tables, this is a guideline for safe operations. As stated in previous chapters,
Baker Hughes INTEQ has means to increase the temperature envelope beyond
quoted numbers by minor tool modifications or adaptation to uncommon mud
types.
The maximum sand content is also a guideline that should reflect common best
practices in today’s industry.
A - iv
x
2 7/8"
3 1/8"
x
x
x
x
x
x
3 1/2"
x
x
x
x
3 3/4"
4 3/4"
x
x
x
x
6 1/2"
x
6 3/4"
x
x
x
x
x
x
x
8"
x
x
9 1/2"
x
x
x
x
x
x
x
x
x
x
x
x*
x
X
11 1/4”
12 3/4"
M1P
M4XL-P
M4XL
M2XL-P
M2PXL
M1Xi-P/LS
M1Xi-P
M1XL-P
M1X-P/LS
M1X-P
M1ADM
M1XL/RF
M1XL
M1X
x
2 3/8"
x
X
x Ultra Series Motor
x X-treme Series Motor
x * Only available as NaviGator Power Section
Overview of standard Baker Hughes INTEQ motor offerings
A-v
2-7/8" M1ADM Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
12.17 ft (3.71 m)
203 lbs (92 kg)
2-3/8" PAC DSI (optional 3" CDP)
2-3/8" API Reg. Box
3.19 inch (81 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
Operated with Air:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
5/6
25 - 120 gpm (100 - 450 l/min)
40 - 185 RPM
290 psi (20 bar)
360 ft-lbs (490 Nm)
460 psi (32 bar)
580 ft-lbs (785 Nm)
13 HP (10 kW)
160 psi (11 bar)
No
550 scfm (16 nm³/min)
295 - 850 RPM
230 psi (16 bar)
310 ft-lbs (420 Nm)
370 psi (26 bar)
495 ft-lbs (670 Nm)
17 HP (13 kW)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
7,200 lbs (32 kN)
4,720 lbs (21 kN)
Adjustable
0° - 3,8°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-1
2-7/8" M2PXL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
17.0 ft (5.19 m)
238 lbs (108kg)
2-3/8" PAC DSI (optional 3" CDP)
2-3/8" API Reg. Box
3.19 inch (81 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
2/3
53 - 106 gpm (200 - 400 l/min)
415 - 830 RPM
1,305 psi (90 bar)
345 ft-lbs (465 Nm)
2,090 psi (144 bar)
550 ft-lbs (745 Nm)
52 HP (39 kW)
160 psi (16 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
7,200 lbs (32 kN)
4,720 lbs (21 kN)
Adjustable
0° - 3,8°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-2
3-1/8" M1X Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
12.1 ft (3.7 m)
220 lbs (100 kg)
2-3/8" API Reg. Box
2-3/8" API Reg. Box
(optional 2-7/8” API Reg. Box on 3-3/4"
OD Drive Sub)
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
3.35 inch (85 mm) at Wear Ring
3.40 inch (86.3 mm) at Bearing
Assy
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
80 - 160 gpm (300 - 600 l/min)
180 - 365 RPM
460 psi (32 bar)
380 ft-lbs (520 Nm)
740 psi (51 bar)
610 ft-lbs (830 Nm)
27 HP (20 kW)
145 psi (10 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
10,100 lbs (45 kN)
6,700 lbs (30 kN)
Adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-3
3-1/8" M1XL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
16.7 ft (5.1 m)
330 lbs (150 kg)
2-3/8" API Reg. Box
2-3/8" API Reg. Box
(optional 2-7/8” API Reg. Box on 3-3/4"
OD Drive Sub)
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
3.35 inch (85 mm) at Wear Ring
3.40 inch (86.3 mm) at Bearing
Assy
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
80 - 160 gpm (300 - 600 l/min)
180 - 365 RPM
870 psi (60 bar)
720 ft-lbs (975 Nm)
1,390 (psi) (96 bar)
1,150 ft-lbs (1,560 Nm)
50 HP (37 kW)
290 psi (20 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
10,100 lbs (45 kN)
6,700 lbs (30 kN)
Adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-4
3-1/8" M1ADM Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
16.7 ft (5.1 m)
330 lbs (150 kg)
2-3/8" API Reg. Box
2-3/8" API Reg. Box
(optional 2-7/8” API Reg. Box on 3-3/4"
OD Drive Sub)
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
3.35 inch (85 mm) at Wear Ring
3.40 inch (86.3 mm) at Bearing
Assy
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
Operated with Air:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
5/6
80 - 160 gpm (300 - 600 l/min)
65 - 125 RPM
290 psi (20 bar)
710 ft-lbs (960 Nm)
460 psi (32 bar)
1,135 ft-lbs (1,540 Nm)
17 HP (13 kW)
190 psi (13 bar)
No
700 scfm (20 nm³/min)
185 - 540 RPM
230 psi (16 bar)
600 ft-lbs (820 Nm)
370 psi (26 bar)
960 ft-lbs (1,310 Nm)
21 HP (16 kW)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
10,100 lbs (45 kN)
6,700 lbs (30 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-5
3-3/4" M1XL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
28.5 ft (8.7 m)
860 lbs (390 kg)
2-7/8" AOH (optional 2-7/8" SL H90,
NC 26)
2-7/8" API Reg. Box
4.1 inch (105 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
80 - 210 gpm (300 - 800 l/min)
150 - 410 RPM
1,600 psi (110 bar)
1,620 ft-lbs (2,200 Nm)
2,550 psi (176 bar)
2,590 ft-lbs (3,520 Nm)
126 HP (94 kW)
318 psi (22 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
14,600 lbs (65 kN)
10,100 lbs (45 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-6
4-3/4" M1X Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
20.7 ft (6.3 m)
800 lbs (360 kg)
NC 38
3-1/2" API Reg. Box
5.1 inch (130 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
105 - 315 gpm (400 - 1,200 l/min)
110 - 325 RPM
725 psi (50 bar)
1,360 ft-lbs (1,850 Nm)
1,160 psi (80 bar)
2,180 ft-lbs (2,960 Nm)
84 HP (63 kW)
175 psi (12 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
22,500 lbs (100 kN)
14,600 lbs (65 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-7
4-3/4" M1XL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
30.8 ft (9.4 m)
1,410 lbs (640 kg)
NC 38
3-1/2" API Reg. Box
5.1 inch (130 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
105 - 315 gpm (400 - 1,200 l/min)
110 - 325 RPM
1,380 psi (95 bar)
2,600 ft-lbs (3,530 Nm)
2,200 psi (152 bar)
4,165 ft-lbs (5,650 Nm)
161 HP (120 kW)
305 psi (21 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
27,500 lbs (100 kN)
14,600 lbs (65 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-8
4-3/4" M1XL/RF Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
30.8 ft (9.4 m)
1,410 lbs (640 kg)
NC 38
3-1/2" API Reg. Box
5.1 inch (130 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
4/5
120 - 225 gpm (450 - 850 l/min)
175 - 335 RPM
1,810 psi (125 bar)
2,350 ft-lbs (3,200 Nm)
2,900 psi (200 bar)
3,760 ft-lbs (5,120 Nm)
150 HP (112 kW)
405 psi (28 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
22,500 lbs (100 kN)
14,600 lbs (65 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A-9
4-3/4" M1ADM Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
22.0 ft (6.7 m)
840 lbs (380 kg)
NC 38
3-1/2" API Reg. Box
5.1 inch (130 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
Operated with Air:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
5/6
160 - 315 gpm (600 - 1,200 l/min)
55 - 110 RPM
290 psi (20 bar)
1,620 ft-lbs (2,200 Nm)
460 psi (32 bar)
2,590 ft-lbs (3,520 Nm)
34 HP (25 kW)
190 psi (13 bar)
No
1,500 scfm (43 nm³/min)
165 - 490 RPM
230 psi (16 bar)
1,390 ft-lbs (1,890 Nm)
370 psi (26 bar)
2,225 ft-lbs (3,025 Nm)
44 HP (33 kW)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
22,500 lbs (100 kN)
14,600 lbs (65 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 10
4-3/4" M1X-P Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
22.0 ft (6.7 m)
816 lbs (370 kg)
NC 38
3-1/2" API Reg. Box
5.1 inch (130 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
105 – 315 gpm (400 – 1,200 l/min)
110 – 325 RPM
1,450 psi (100 bar)
3,135 ft-lbs (4,250 Nm)
1,810 psi (125 bar)
3,920 ft-lbs (5,315 Nm)
194 HP (145 kW)
174 psi (12 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
22,500 lbs (100 kN)
14,600 lbs (65 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 11
4-3/4" M1Xi-P Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
8.26 ft (2.5 m)
476 lbs (216 kg)
NC-38
3-1/2" Regular
1
Depends on Wear Ring
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
105 - 315 gpm (400 - 1,200 l/min)
110 - 325 RPM
325 psi (22.5 bar)
705 ft-lbs (955 Nm)
435 psi (30 bar)
940 ft-lbs (1,275 Nm)
44 HP (33 kW)
145 psi (10 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
13,500 lbs (60 kN)
8,990 lbs (40 kN)
adjustable
0° - 3.6°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 12
4-3/4" M2PXL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
30.8 ft (9.4 m)
1,410 lbs (640 kg)
NC 38
3-1/2" API Reg. Box
5.1 inch (130 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
2/3
80 - 265 gpm (300 - 1,000 l/min)
180 - 600 RPM
1,600 psi (110 bar)
1,440 ft-lbs (1,950 Nm)
2,550 psi (176 bar)
2,300 ft-lbs (3,120 Nm)
165 HP (123 kW)
190 psi (13 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
22,500 lbs (100 kN)
14,600 lbs (65 kN)
Adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 13
6-1/2" M1X Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
23.0 ft (7.0 m)
1,765 lbs (800 kg)
NC 50
4-1/2" API Reg. Box
7.1 inch (180 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
265 - 660 gpm
(1,000 - 2,500 l/min)
90 - 220 RPM
460 psi (32 bar)
2,690 ft-lbs (3,650 Nm)
740 psi (51 bar)
4,300 ft-lbs (5,840 Nm)
113 HP (84 kW)
220 psi (15 bar)
Yes
725 gpm (2,750 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 14
6-1/2" M1XL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
31.7 ft (9.65 m)
2,750 lbs (1,250 kg)
NC 50
4-1/2" API Reg. Box
7.1 inch (180 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
265 - 660 gpm
(1,000 - 2,500 l/min)
90 - 220 RPM
870 psi (60 bar)
5,050 ft-lbs (6,850 Nm)
1390 psi (96 bar)
8,080 ft-lbs (10,960 Nm)
212 HP (158 kW)
350 psi (24 bar)
Yes
725 gpm (2,750 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 15
6-1/2" M1ADM Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
23.0 ft (7.0 m)
1,765 lbs (800 kg)
NC 50
4-1/2" API Reg. Box
7.1 inch (180 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
Operated with Air:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
7/8
345 - 610 gpm
(1,300 - 2,300 l/min)
50 - 95 RPM
350 psi (24 bar)
4,300 ft-lbs (5,800 Nm)
557 psi (38 bar)
6,880 ft-lbs (9,280 Nm)
76 HP (57 kW)
220 psi (15 bar)
Yes
725 gpm (2,750 l/min)
2,100 scfm (60 nm³/min)
110 - 325 RPM
230 psi (16 bar)
3,100 ft-lbs (4,200 Nm)
370 psi (26 bar)
4,960 ft-lbs (6,720 Nm)
65 HP (48 kW)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 16
6-1/2" M1X-P Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
23.0 ft (7.0 m)
1,765 lbs (800 kg)
NC 50
4-1/2" API Reg. Box
7.3 inch (185 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
265 - 660 gpm
(1,000 - 2,500 l/min)
90 - 220 RPM
870 psi (60 bar)
5,780 ft-lbs (7,840 Nm)
1,090 psi (75 bar)
7,225 ft-lbs (9,800 Nm)
242 HP (180 kW)
220 psi (15 bar)
Yes
726 gpm (2,750 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 17
6-1/2" M2PXL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
31.7 ft (9.65 m)
2,750 lbs (1,250 kg)
NC 50
4-1/2" API Reg. Box
7.3 inch (185 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
2/3
265 - 530 gpm
(1,000 - 2,000 l/min)
235 - 470 RPM
1,160 psi (80 bar)
2,690 ft-lbs (3,650 Nm)
1,856 psi (128 bar)
4,300 ft-lbs (5,840 Nm)
240 HP (180 kW)
205 psi (14 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 18
6-3/4" M1X Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
23.0 ft (7.0 m)
1,765 lbs (800 kg)
NC 50
4-1/2" API Reg. Box
7.3 inch (185 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
265 - 660 gpm
(1,000 - 2,500 l/min)
90 - 220 RPM
460 psi (32 bar)
2,690 ft-lbs (3,650 Nm)
740 psi (51 bar)
4,300 ft-lbs (5,840 Nm)
113 HP (84 kW)
220 psi (15 bar)
Yes
725 gpm (2,750 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 19
6-3/4" M1XL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
31.7 ft (9.65 m)
2,750 lbs (1,250 kg)
NC 50
4-1/2" API Reg. Box
7.3 inch (185 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
265 - 660 gpm
(1,000 - 2,500 l/min)
90 - 220 RPM
870 psi (60 bar)
5,050 ft-lbs (6,850 Nm)
1,390 psi (96 bar)
8,080 ft-lbs (10,960 Nm)
212 HP (158 kW)
350 psi (24 bar)
Yes
725 gpm (2,750 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 20
6-3/4" M1ADM Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
23.0 ft (7.0 m)
1,765 lbs (800 kg)
NC 50
4-1/2" API Reg. Box
7.3 inch (185 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
Operated with Air:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
7/8
345 - 610 gpm
(1,300 - 2,300 l/min)
50 - 95 RPM
350 psi (24 bar)
4,300 ft-lbs (5,800 Nm)
557 psi (38 bar)
6,880 ft-lbs (9,280 Nm)
76 HP (57 kW)
220 psi (15 bar)
Yes
725 gpm (2,750 l/min)
2,100 scfm (60 nm³/min)
110 - 325 RPM
230 psi (16 bar)
3,100 ft-lbs (4,200 Nm)
370 psi (26 bar)
4,960 ft-lbs (6,720 Nm)
65 HP (48 kW)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 21
6-3/4" M1X-P Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
23.0 ft (7.0 m)
1,765 lbs (800 kg)
NC 50
4-1/2" API Reg. Box
7.3 inch (185 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
265 - 660 gpm
(1,000 - 2,500 l/min)
90 - 220 RPM
870 psi (60 bar)
5,780 ft-lbs (7,840 Nm)
1,090 psi (75 bar)
7,225 ft-lbs (9,800 Nm)
242 HP (180 kW)
220 psi (15 bar)
Yes
726 gpm (2,750 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 22
6-3/4" M2PXL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
31.7 ft (9.65 m)
2,750 lbs (1,250 kg)
NC 50
4-1/2" API Reg. Box
7.3 inch (185 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
2/3
265 - 530 gpm
(1,000 - 2,000 l/min)
235 - 470 RPM
1,160 psi (80 bar)
2,690 ft-lbs (3,650 Nm)
1,856 psi (128 bar)
4,300 ft-lbs (5,840 Nm)
240 HP (180 kW)
205 psi (14 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
36,000 lbs (160 kN)
23,600 lbs (105 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 23
8" M1XL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
34.77 ft (10.65 m)
4,080 lbs (1,850 kg)
6-5/8" API Reg. Box
6-5/8" API Reg. Box
8.5 inch (217 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
395 - 900 gpm
(1,500 - 3,400 l/min)
85 - 195 RPM
870 psi (60 bar)
7,670 ft-lbs (10,400 Nm)
1390 psi (96 bar)
12,270 ft-lbs (16,640 Nm)
285 HP (213 kW)
300 psi (21 bar)
Yes
990 gpm (3,750 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
67,400 lbs (300 kN)
45,000 lbs (200 kN)
adjustable
0° - 2,5°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 24
8" M1ADM Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
27.8 ft (8.5 m)
3,300 lbs (1,500 kg)
6-5/8" API Reg. Box
6-5/8" API Reg. Box
8.5 inch (217 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
Operated with Air:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
7/8
530 - 900 gpm
(2,000 - 3,400 l/min)
50 - 80 RPM
350 psi (24 bar)
7,450 ft-lbs (10,100 Nm)
557 psi (38 bar)
11,920 ft-lbs (16,160 Nm)
114 HP (85 kW)
220 psi (15 bar)
Yes
990 gpm (3,750 l/min)
3,000 scfm (85 nm³/min)
90 - 265 RPM
230 psi (16 bar)
5,320 ft-lbs (7,220 Nm)
370 psi (26 bar)
8,510 ft-lbs (11,550 Nm)
91 HP (68 kW)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
67,400 lbs (300 kN)
45,000 lbs (200 kN)
adjustable
0° - 2, 5°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 25
9-1/2" M1XL Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
36.1 ft (11.0 m)
5,950 lbs (2,700 kg)
6-5/8" API Reg. Box (7 5/8” API
Reg. Box)
6-5/8" API Reg. Box
10.4 inch (265 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
530 - 1,060 gpm
(2,000 - 4,000 l/min)
85 - 165 RPM
870 psi (60 bar)
10,770 ft-lbs (14,600 Nm)
1390 psi (96 bar)
17,230 ft-lbs (23,360 Nm)
338 HP (252 kW)
260 psi (18 bar)
Yes
1,160 gpm (4,400 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
92,200 lbs (410 kN)
60,700 lbs (270 kN)
adjustable
0° - 2,0°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 26
9-1/2" M1ADM Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
29.2 ft (8.9 m)
5,300 lbs (2,400 kg)
6-5/8" API Reg. Box (7 5/8” API
Reg. Box)
6-5/8" API Reg. Box
10.4 inch (265 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
Operated with Air:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
7/8
660 - 1,110 gpm
(2,500 - 4,200 l/min)
40 - 70 RPM
350 psi (24 bar)
11,060 ft-lbs (15,000 Nm)
557 psi (38 bar)
17,700 ft-lbs (24,000 Nm)
147 HP (110 kW)
190 psi (13 bar)
Yes
1,160 gpm (4,400 l/min)
3,900 scfm (110 nm³/min)
80 - 230 RPM
230 psi (16 bar)
7,900 ft-lbs (10,710 Nm)
370 psi (26 bar)
12,640 ft-lbs (17,140 Nm)
120 HP (90 kW)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
92,200 lbs (410 kN)
60,700 lbs (270 kN)
adjustable
0° - 2,0°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 27
11 1/4" M1P Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
32 ft (9.75 m)
6,892 lbs (3,126 kg)
7 5/8" API Reg. Box
7 5/8" API Reg. Box
12.09 inch (307 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
9/10
790 - 1,270 gpm
(3,000 - 4,800 l/min)
70 - 110 RPM
725 psi (50 bar)
17,700 ft-lbs (24,000 Nm)
1,160 psi (80 bar)
28,320 ft-lbs (38,400 Nm)
370 HP (276 kW)
230 psi (16 bar)
Yes
1,400 gpm (5,300 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
114,700 lbs (510 kN)
75,300 lbs (335 kN)
adjustable
0° - 2,0°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 28
12-3/4" M1P Ultra Series Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
34.25 ft (10.44 m)
7,165 lbs (3,250 kg)
7-5/8" API Reg. Box
7-5/8" API Reg. Box
12 31/32 inch (330 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
9/10
795 - 1,270 gpm
(3,000 - 4,800 l/min)
70 - 110 RPM
725 psi (50 bar)
17,700 ft-lbs (24,000 Nm)
1,160 psi (80 bar)
28,320 ft-lbs (38,400 Nm)
371 HP (276 kW)
230 psi (16 bar)
Yes
1,400 gpm (5,300 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
114,700 lbs (510 kN)
75,300 lbs (335 kN)
adjustable
0° - 2,0°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 29
2-3/8" M1X-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
8.4 ft (2.6 m)
100 lbs (45 kg)
1-1/2" AMT
1-1/2" AMT
2.5 inch (62.5 mm)
Mud lubricated Bearing Section
(Diamond Bearing available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
25 - 80 gpm (100 - 300 l/min)
145 - 435 RPM
725 psi (50 bar)
290 ft-lbs (395 Nm)
905 psi (62.5 bar)
365 ft-lbs (495 Nm)
24 HP (18 kW)
85 psi (6 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
3,800 lbs (17 kN)
2,500 lbs (11 kN)
adjustable
0° - 2,8°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
320°F (160°C)
375°F (190°C)
1%
A - 30
2-7/8" M1X-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
10.8 ft (3.3 m)
175 lbs (80 kg)
2-3/8" PAC DSI / 3" CDP
2-3/8" API Reg. Box
3.2 inch (81 mm)
Mud lubricated Bearing Section
(Diamond Bearing available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
25 - 120 gpm (100 - 450 l/min)
110 - 490 RPM
1,160 psi (80 bar)
625 ft-lbs (845 Nm)
1,450 psi (100 bar)
780 ft-lbs (1,055 Nm)
58 HP (43 kW)
116 psi (8 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
7,200 lbs (32 kN)
4,720 lbs (21 kN)
adjustable
0° - 3,8°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
320°F (160°C)
375°F (190°C)
1%
A - 31
3-1/2" M1XL-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
24 ft (7.35 m)
615 lbs (279 kg)
2-7/8" AOH
1
2-3/8" Regular
3.74 inch (95 mm)
Mud lubricated Bearing Section
(Diamond Bearing available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
80 - 180 gpm (300 - 680 l/min)
160 - 360 RPM
1,525 psi (105 bar)
1,710 ft-lbs (2,320 Nm)
2,030 psi (140 bar)
2,280 ft-lbs (3,090 Nm)
117 HP (87 kW)
305 psi (21 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
13,500 lbs (60 kN)
8,990 lbs (40 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
1
320°F (160°C)
375°F (190°C)
1%
2-7/8" Regular optional
A - 32
3-1/2" M1Xi-P/LS X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
8.32 ft (2.54 m)
192 lbs (87 kg)
2-7/8" AOH
1
2-3/8" Regular
2
3.74 inch (95 mm)
Mud lubricated Bearing Section
(Diamond Bearing available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
80 - 180 gpm (300 - 680 l/min)
90 - 200 RPM
220 psi (15 bar)
440 ft-lbs (600 Nm)
350 psi (24 bar)
700 ft-lbs (960 Nm)
17 HP (13 kW)
145 psi (10 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
10,100 lbs (45 kN)
6,740 lbs (30 kN)
adjustable
0° - 4,0°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
1
2
320°F (160°C)
375°F (190°C)
1%
2-7/8" Regular Optional
3.937 inch (100 mm) for 4-3/4" Hole Size
A - 33
3-1/2" M1X-P/LS X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
24.3 ft (7.39 m)
448 lbs (203 kg)
2-7/8" AOH
1
2-3/8" Regular
3.74 inch (95 mm)
Mud lubricated Bearing Section
(Diamond Bearing available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
80 - 180 gpm (300 - 680 l/min)
90 - 200 RPM
580 psi (40 bar)
1,165 ft-lbs (1,580 Nm)
725 psi (50 bar)
1,455 ft-lbs (1,975 Nm)
44 HP (33 kW)
160 psi (11 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
13,500 lbs (60 kN)
8,990 lbs (40 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
1
320°F (160°C)
375°F (190°C)
1%
2-7/8" Regular optional
A - 34
3-1/2" M2XL-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
23.92 ft (7.29 m)
593 lbs (269 kg)
2-7/8" AOH
1
2-3/8" Regular
3.74 inch (95 mm)
Mud lubricated Bearing Section
(Diamond Bearing available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
1/2
60 - 130 gpm (230 - 490 l/min)
400 - 890 RPM
1,525 psi (105 bar)
550 ft-lbs (745 Nm)
2,030 psi (140 bar)
735 ft-lbs (995 Nm)
92 HP (69 kW)
290 psi (20 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
13,500 lbs (60 kN)
8,990 lbs (40 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
1
320°F (160°C)
375°F (190°C)
1%
2-7/8" Regular optional
A - 35
4-3/4" M1XL-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
32.81 ft (10.0 m)
1,655 lbs (750 kg)
NC 38
3-1/2" API Reg. Box
5.2 inch (133 mm)
Mud lubricated Bearing Section
(Diamond Bearing available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
105 - 315 gpm (400 - 1,200 l/min)
110 - 325 RPM
2,065 psi (140 bar)
4,470 ft-lbs (5,950 Nm)
2,755 psi (190 bar)
5,960 ft-lbs (8,080 Nm)
276 HP (205 kW)
305 psi (21 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
22,500 lbs (100 kN)
14,600 lbs (65 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
320°F (160°C)
375°F (190°C)
1%
A - 36
4-3/4" M4XL X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
30.8 ft (9.4 m)
1,410 lbs (640 kg)
NC 38
3-1/2" API Reg. Box
5.1 inch (130 mm)
Mud lubricated Diamond Bearing
Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
1/2
130 - 315 gpm (500 - 1,200 l/min)
520 - 1,250 RPM
1,520 psi (105 bar)
960 ft-lbs (1,300 Nm)
2,436 psi (168 bar)
1,475 ft-lbs (2,000 Nm)
230 HP (170 kW)
200 psi (14 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
22,500 lbs (100 kN)
14,600 lbs (65 kN)
adjustable
0° - 3,2°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
265°F (130°C)
320°F (160°C)
1%
A - 37
6-3/4" M1XL-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
35.4 ft (10.8 m)
2,980 lbs (1,350 kg)
NC 50
4-1/2" API Reg. Box
7.3 inch (186 mm)
Mud lubricated Bearing Section
(Diamond Bearings available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
265 - 660 gpm
(1,000 - 2,500 l/min)
90 - 220 RPM
1,305 psi (90 bar)
8,670 ft-lbs (11,760 Nm)
1,740 psi (120 bar)
11,560 ft-lbs (15,675 Nm)
363 HP (270 kW)
348 psi (24 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
54,000 lbs (240 kN)
36,000 lbs (160 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
320°F (160°C)
375°F (190°C)
1%
A - 38
6-3/4" M4XL-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
31.5 ft (9.6 m)
2,756 lbs (1,250 kg)
NC 50
4-1/2" API Reg. Box
7.4 inch (188 mm)
Mud lubricated Bearing Section
(Diamond Bearing available on
request)
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
1/2
265 - 530 gpm
(1,000 - 2,000 l/min)
450 - 900 RPM
1,960 psi (135 bar)
2,880 ft-lbs (3,900 Nm)
2,610 psi (180 bar)
3,845 ft-lbs (5,210 Nm)
493 HP (368 kW)
174 psi (12 bar)
No
-
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
45,000 lbs (200 kN)
30,300 lbs (135 kN)
adjustable
0° - 2,75°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
320°F (160°C)
375°F (190°C)
1%
A - 39
9-1/2" M1X-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
29.2 ft (8.9 m)
6,615 lbs (3,000 kg)
6-5/8" API Reg. Box (7 5/8" API
Reg.)
6-5/8" API Reg. Box
10.6 inch (270 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
530 - 1,160 gpm
(2,000 - 4,400 l/min)
80 - 185 RPM
1,160 psi (80 bar)
16,450 ft-lbs (22,300 Nm)
1,450 psi (100 bar)
20,565 ft-lbs (27,900 Nm)
575 HP (430 kW)
220 psi (15 bar)
Yes
1,160 gpm (4,400 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
92,170 lbs (410 kN)
60,700 lbs (270 kN)
adjustable
0° - 2,0°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
320°F (160°C)
375°F (190°C)
1%
A - 40
12-3/4" M1X-P X-tremeTM Motor
General Tool Specifications
Length:
Weight:
Top Connection:
Bit Connection:
Max. OD (at Wear Pad):
Bearing Type:
Drive Mechanism:
34.2 ft (10.4 m)
10,600 lbs (4,800 kg)
7 5/8" API Reg. Box
7 5/8" API Reg. Box
13.1 inch (333 mm)
Mud lubricated Bearing Section
Mud Flow
Performance Data
Lobe Configuration:
Flow Rate:
Speed:
Operating Differential Pressure:
Operating Torque:
Maximum Differential Pressure:
Maximum Torque:
Power Output:
No Load Pressure:
Rotor Nozzle:
Maximum Flow Rate w/ Nozzle:
5/6
790 - 1,740 gpm
(3,000 - 6,600 l/min)
70 - 150 RPM
1,160 psi (80 bar)
29,650 ft-lbs (40,200 Nm)
1,450 psi (100 bar)
37,050 ft-lbs (50,250 Nm)
845 HP (630 kW)
290 psi (20 bar)
Yes
1,740 gpm (6,600 l/min)
Operational Data
Maximum WOB:
Operating WOB:
Defl. Device Type:
Defl. Angle:
Maximum DLS and String Rotation:
Mud Type Limitation:
114,700 lbs (510 kN)
75,300 lbs (335 kN)
adjustable
0° - 2,0°
Depends on AKO setting,
stabilization, hole size
No general limitation (in case of
uncommon mud system a rubber/mud
compatibility test is recommended)
Temperature (Stator System D):
Temperature (Stator System F):
Maximum Sand Content:
320°F (160°C)
375°F (190°C)
1%
Max. Build Up Rate in a 17 1/2" hole up to 6°/100ft
A - 41
Appendix
B
APPENDIX B: Nozzle Size Charts
SI Units
B-1
US Units
B-2
Appendix
C
APPENDIXC: Abbreviations
AKO
API
BHA
BUR
CSNMDP
DLS
ECD
HP/HT
LCM
LGS
LWD
MWD
OBM
PDC
POOH
ROP
RPM
RWD
SBM
SWRD
TOB
TSP
WBM
WOB
Adjustable Kick Off Sub
American Petroleum Institute
Bottomhole Assembly
Build Up Rate
Compressive Service Non Magnetic Drill Pipe
Dog Leg Severity
Equivalent Circulating Density
High Pressure/High Temperature
Lost Circulation Material
Low Gravity Solids
Logging While Drilling
Measurement While Drilling
Oil-based Fluids
Polycrystalline Diamond Compact
Pulling Out Of Hole
Rate of Penetration
Revolution Per Minute
Ream While Drilling
Synthetic-based Fluids
Steerable Ream While Drilling
Torque On Bit
Thermally Stable PDC bit
Water-based Fluids
Weight On Bit
C-1