Combining Prices and Quantities Pollution Controls Under
advertisement

June 8, 2015
Combining Prices and Quantities Pollution Controls Under
Partitioned Environmental Regulation
Jan Abrella , Sebastian Rauscha,b
a
Center for Economic Research at ETH (CER-ETH), Department of Management, Technology and Economics, ETH
Zurich, Zurich, Switzerland.
b
Joint Program of the Science and Policy of Global Change, Massachusetts Institute of Technology, Cambridge, USA.
Abstract
We argue that bounds on permit prices can improve the cost effectiveness of partitioned emissions
regulation under uncertainty if the price constraints are used to reallocate the abatement burden
across sectors. In posing the problem, we have in mind a situation where the regulatory authority
is uncertain about the abatement costs of polluting firms and cannot impose a uniform regulation
scheme. Therefore, one part of the economy is directly subjected to quantity regulation and complementary control measures are taken in the other to meet the overall environmental target. In
such a setting the introduction of a price floor and ceiling below and above the optimal price decreases the cost of regulation. We illustrate the cost savings in a quantitative model of European
carbon abatement in which some sectors are part of the European emission trading schemes and
the remaining are regulated by and additional cost-effective measure. We find that price bounds
have the potential to decrease the excess cost of regulation under uncertainty by around one half.
Keywords: Emissions Trading, Price Floors, EU ETS, Computable General Equilibrium
Modeling
JEL: Q48, Q54, C68
1. Introduction
It is well known that an ex-ante optimal permit (or tax) policy will in general yield ex-post inefficiency when the regulatory authority is uncertain what the actual costs of pollution control will
be (Weitzman, 1974). Several hybrid regulation strategies which combine elements of permit markets and price control and lead to ex-post efficiency have been proposed in the literature (Roberts
& Spence, 1976; Collinge & Oates, 1982; Unold & Requate, 2001; Pizer, 2002). In one way or
another, these hybrid strategies propose to implement a price-quantity relation for emissions that
∗
Corresponding author: Jan Abrell, Department of Management, Technology, and Economics, ETH Zurich,
Zürichbergstrasse 18, ZUE E, 8032 Zurich, Switzerland, Phone: +41 44 632-06-52. Email: jabrell@ethz.ch.
equals the marginal damage function. The welfare gains of ex-post efficient hybrid regulation
relative to using either pure price or quantity controls have shown to be substantial (Pizer, 2002).
Two critical features of real-world examples of quantity controls (or permit markets) seem,
however, to be at odds with the predominant view underlying the literature on ex-post efficient
permit markets. First, it is assumed that policymakers are confronted with the dual task of choosing the overall environmental target and selecting the policy instruments to achieve this target.
While this view unarguably describes the regulatory problem in more general terms, the problems
of target setting and instrument choice (or design) are often viewed separately in real-world policymaking. In particular, the question of how to choose policy instruments is typically investigated
under the assumption of a fixed environmental target. Second, none of the previous analyses have
considered the fact that many real-world examples of environmental regulation are characterized
by incomplete coverage of pollution sources. For example, most of todays carbon dioxide (CO2 )
emissions trading schemes (ETS) implemented in numerous countries around the world to combat
climate change cover only a relatively small fraction of total emissions; at the same time, complementary policy measures to control non-covered emissions are employed to meet a given overall
national environmental target.1
This paper examines the following question: how can hybrid (price and quantity) environmental regulation be designed in order to minimize aggregate compliance costs if the overall environmental goal is fixed and if there exists incomplete regulatory coverage? In posing the problem,
we have in mind a situation where the regulatory authority is uncertain about the (marginal) abatement costs of polluting firms in both parts of the economy, i.e. the one that is directly subjected
to quantity regulation and the one where complementary control measures are taken to meet the
overall environmental target. In particular, we are interested in the question how elements of price
control regulation can be introduced into an otherwise standard permit market system to enhance
ex-post welfare under for a given environmental target.2
As a motivating example for our analysis we take the European Unions 2020 Climate and
Energy Package (Commission, 2008). The central pillar is the EU ETS which represents today
the largest international trading system for greenhouse gases and is often conceived as a prototype
for other cap-and-trade systems now emerging all over the world (Convery, 2009). The EU ETS
covers only about 45% of emissions, mainly from electricity and energy-intensive installations.
The remainder of emissions to achieve overall EU reductions goals of 20% by 2020 (relative
to 1990 levels) has to be achieved outside of the EU ETS through complementary measures by
Member States.3
Permits markets, such as the EU ETS, have shown to suffer from two major structural problems
1
In fact, this situation is reflective of the current energy and climate policy context in many countries. Regulatory
approaches often comprise permit trading instruments and use additional, distinct instruments to regulate energy use
and emissions in non-covered sectors.
2
Given that we assume the overall environmental target to be fixed, we analyze ex-post “better” but not “efficient”
hybrid permit markets.
3
Under the so-called “Effort Sharing Decision”, Member States have taken on binding annual targets for reducing
their greenhouse gas emissions from the sectors not covered by the EU ETS. See Decision No 406/2009/EC of the
European Parliament and of the Council of 23 April 2009 on the effort of Member States to reduce their greenhouse
gas emissions to meet the Communitys greenhouse gas emission reduction commitments up to 2020.
2
that are directly related to incomplete regulatory coverage. First, the limited sectoral coverage can
severely undermine cost-effectiveness due to the failure to equalized marginal abatement costs
across all emissions sources (Böhringer et al., 2006, 2014).4 . Second, complementary climate and
energy policy measures in sectors not regulated under emissions trading have created substantial
downward pressure on the permit price. Too low carbon prices are often viewed as increasing
investment uncertainty, which is likely to have a negative impact on further investments in lowcarbon technologies. In fact, the Commission (2014) has proposed to introduce in phase 4 a
“Market Stability Reserve which aims at rectifying the structural problem of allowances surplus
by creating a mechanism that adjusts the supply of permits based on the demand for permits. This
feature can be interpreted as effectively introducing price control elements (i.e., a price bound and
ceiling) in the permit market.5
We argue in this paper that bounds on permit prices can improve the cost-effectiveness of hybrid emissions regulation if the price constraint is used to reallocate the abatement burden across
sectors. We find, that permit price floors below the theoretically optimal price decrease the cost of
regulation. Likewise, permit price ceilings are beneficial as long as the ceiling is above the optimal
price. Our results are consequential for the practical implementation of hybrid emission trading
system, particularly for the current discussion about the implementation of a market stability reserve for the EU ETS.
The paper is organized as follows. Section 2 presents theoretical background of price floors
or more general permit price bounds in regulation systems with partitioned environmental targets.
In section 4 analyzes the empirical implications of a price floor for EU-ETS allowances on the
welfare cost of reaching European carbon abatement targets. Section 5 summaries our findings
and draws conclusions for the future design of the EU-ETS.
2. Model
2.1. Setup
We consider an economy with two polluting sectors i ∈ {T, NT} and partitioned environmental regulation. Emissions in sector T are initially regulated by a pure quantity instrument, i.e. an
emissions trading scheme. Emissions in sector NT are not covered under the emissions trading
scheme but are assumed to be regulated by a separate instrument which is assumed to achieve costeffective abatement in sector NT (for example, through a carbon tax or sectoral permit market).
The regulator is uncertain about the(marginal) abatement cost curves in each sector. Before the
revelation of uncertainty the regulator has to decide about regulatory measures. I.e., the regulator
decides about the partition of the emission budget and (possibly) some a price floor and ceiling in
the permit market of the trading sector. In the case of price bounds, it is assumed that the regulator
can ex-post, i.e., after the revelation of marginal abatement cost curves (MAC),6 adjust the abate4
Cost-effectiveness may also be hampered by strategic partitioning (Böhringer & Rosendahl, 2009; Dijkstra et al.,
2011) While this was more likely to be an issue in first and second phases of the EU ETS, the current phase
5
Other cap-and-trade systems in the world, such as in California, RGGI, and Australia already have a minimum
price in place.
6
Throughout the remainder of the is article we refer to situation before (after) the revelation of uncertainty as
ex-ante (ex-post).
3
ment allocation according to an ex-ante specified reallocation rule such that overall abatement
remains constant.
Actual sectoral emissions are denoted by ei , and emissions before the introduction of regulation
are given by e0i . The overall environmental target in the economy is fixed throughout and given by
P
e, and assumed to be binding, i.e. e < i e0i . Sectoral abatement is defined by ai = e0i − ei , and
P
the total abatement requirement is a := i e0i − e > 0. The regulator decides how total abatement
is allocated across sectors by choosing sectoral abatement requirements ai . The fulfillment factor
is defined as the share of total abatement allocated to the sector T subject to emission trading:
λ := aaT .
The costs of abatement in sector i are denoted as Ci (ai , ηi ) and assumed to be strictly convex
in the abatement (∂Ci /∂ai > 0 and ∂2Ci /∂a2i > 0). ηi is a sector specific disturbance term which is
distributed over the compact support [−bi , bi ] with the distribution function fi (ηi ). Abatement cost
are assumed to be increasing in the disturbance term (∂Ci /∂ηi > 0). At the time when the regulator
decides over regulatory instruments the abatement cost functions and the disturbance distributions
are common knowledge. However, neither the regulator nor the firms knows the realization of the
random variables. After the realization of the disturbance terms, they are known by the firms as
well as by the regulator.
The regulatory authority’s decision problem is to choose a set of pollution control measures to
minimize expected total abatement cost:
(1)
Ψ = E CT (λa, ηT ) + CNT ({1 − λ}a, ηNT ) .
In posing this problem, we have in mind a world of partitioned environmental regulation where the
partition of the system is exogenously given in the sense that the assignment of firms to the trading
and non-trading sector is exogenous.7 The regulator seeks to optimize the regulatory scheme by
imposing additional price bounds in the sector that is subject to an ETS for a given instrument
choice in the other sector and given a fixed economy-wide environmental target for the entire
economy.
2.2. First-best
Before characterizing the optimal solutions in the presence of uncertainty, it is useful to define
the first-best situation as a reference point. In such a first best situation the regulator is able to
choose a state-dependent abatement allocation. I.e., for each state of the world (likewise possible
combination of ex-post abatement functions) the regulator can assign the abatement allocation
separately. Minimizing (1) by choosing a state-dependent fulfillment factor, yields the well known
condition that MAC are equalized across sectors in every state of the world:8
∂C NT (aNT , ηNT ) ∂CT (aT , ηT ) =
∀ηT , ηNT .
(2)
∂aT
∂aNT
aT =λa
aNT =(1−λ)a
Condition (2) implicitly defines the ex-post optimal fulfillment factor as a function of the state
variables: λ∗ex-post (ηT , ηNT )
7
Caillaud & Demange (2005) analyze the optimal assignment of activities to trading and tax systems under uncertainty.
8
An interior solution, i.e., λ ∈ (0, 1) is assumed.
4
2.3. Pure quantity control
In general, the regulators has to choose the regulatory measure ex-ante, i.e., before the realization of the marginal abatement cost curves. In this section it is assumed that the regulator can only
choose the abatement burden for the different sectors, likewise, the fulfillment factor λ. Note, that
as the fulfillment factor is chosen ex-ante, i.e., is independent from the state of the world. Minimizing total abatement cost (1) leads to the optimality condition that the expected MAC equalize
across the sectors:
#
"
#
"
∂C NT (aNT , ηNT ) ∂CT (aT , ηT ) =E
.
(3)
E
∂aT
∂aNT
aT =λa
aNT =(1−λ)a
Condition (3) implicitly defines the ex-ante optimal fulfillment factor under pure quantity control
λ∗ex-ante which is independent of the realization of the disturbance terms.
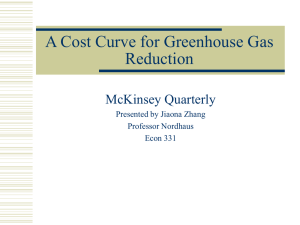
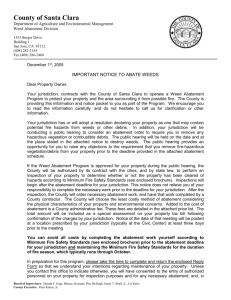
Figure 1: Emissions trading and price controls under partitioned environmental regulation
Given incomplete information about firms’ abatement costs, it is, however, unlikely that the
ex-ante optimal fulfillment factor will equate ex-post marginal abatement costs, i.e. after the realization of the random variable. Thus, in general λ∗ex-ante , λ∗ex-post (ηT , ηNT ). Figure 1 depicts
the ex-post sectoral marginal abatement cost functions and the ex-ante and ex-post optimal fulfillment factors for a given environmental target. Total abatement costs are minimized if abatement
burden is partitioned according to λ∗ex-post which leads to the optimal uniform carbon price P∗ . If
λ∗ex-ante , λ∗ex-post (ηT , ηNT ), the carbon prices in the T and NT sectors, PT and PNT differ and excess
abatement costs are given by the sum of the two gray shaded areas. Given partitioned environmental regulation and uncertainty about firms’ abatement costs, the deviation between ex-ante and
ex-post optimal fulfillment factors causes excess cost of second-best regulation which motivates
the introduction of price bounds in order to hedge against high differences in MAC.
5
2.4. Quantity control with permit price bounds
We now extend the regulators set of instruments by a price floor and ceiling. I.e., the regulator
chooses the fulfillment factor as well as the bounds on the permit price in the T sector before the
realization of the disturbance terms. As the environmental target is constant, a binding price floor
implies rationing of the emission budget in the T sector and shifting this amount to the remaining
sector. In contrast, a binding price ceiling will decrease (increase) the abatement requirement in the
T (NT ) sector. Thus, the ex-post fulfillment factor, i.e., after realization of abatement cost, will be
a function of the state variables. However, in contrast to the first-best case the ex-post fulfillment
factor is not a choice of the regulatory authority but indirectly influenced by the price collar chosen
before the revelation of uncertainty. We proceed by first analyzing the ex-post situation after the
realization of a specific state followed by a characterization the optimal choice of the fulfillment
factor and price collar.
2.4.1. Ex-post effects of price bounds
Consider again the situation after the realization of specific state as shown in Figure 1. Exante, the regulator has chosen the fulfillment factor λ∗ex-ante as well as a the price floor Pmin . Without
price bounds, i.e., under pure quantity control, this would lead to emission prices PT and PNT in the
respective sectors. If the price in trading sector is above the price floor (PT > Pmin ), the price bound
has no impact. If, in contrast, the price in the T sector realizes below the price floor (PT < Pmin ),
the price bound becomes binding and abatement in the T sector needs to be increased in order to
increase the price. As the environmental target, i.e., total abatement, is constant, abatement in the
NT sector has to decline. Consequently, the allocation factor is adjusted to λmin . As abatement
in the non-trading sector decreases, the carbon price in this sector declines from PNT to Pmin
NT .
Therefore, the introduction of the price floor moves sectoral carbon prices, and, thus, marginal
abatement cost, closer to the uniform first-best carbon price P∗ as compared to a pure quantitybased regulation scheme. As a consequence the excess cost of second-best regulation decrease by
the light gray-shaded area. As a similar argumentation can be applied for a price ceiling above the
optimal first-best price, we obtain the following proposition.
Proposition 1. Given strictly convex sectoral abatement cost functions, a constant economy-wide
environmental target, and partitioned regulation with sectoral targets implied by a pre-determined
fulfillment factor λ
(a) an emission price floor in one partition (weakly) decreases total abatement costs if the price
bound is lower or equal to the optimal permit price P∗ .
(b) an emission price ceiling in one partition (weakly) decreases total abatement costs if the
price bound is greater or equal to the optimal permit price P∗ .
Proof. See Appendix A
Proposition 1 reflects a fundamental economic intuition: Under partitioned environmental regulation and given that the environmental target is assumed to be constant, the regulator cannot
be worse in terms of total abatement costs as long as the price floor is set below or equal to
the (ex-post) optimal environmental tax. If the initially chosen fulfillment factor was too high,
6
i.e. abatement in the trading sector is sub-optimally high, the permit price exceeds the optimal
level anyways but the price floor will not be binding. Thus, total abatement cost are not affected.
In contrast, if the fulfillment factor was set too low, the endogenous adjustment of the fulfillment
factor triggered by introducing a binding price floor will decrease total abatement cost.
Proposition 1 implies that if the regulatory authority faces partitioned environmental targets
and has access to an estimate of the optimal permit price in one of the sectors, imposing a price collar together with a mechanism that adjusts sectoral environmental targets under an overall constant
abatement effort has the potential to decrease total abatement costs. Put differently, introducing the
price collar endogenously reallocates carbon budgets such that abatement costs are reduced. As a
consequence, the optimal carbon price needs not to be known for sure, but estimating an interval
and imposing the respective price collar improves efficiency of environmental regulation.
2.4.2. Ex-ante choice of price bounds
Before the realization of marginal abatement cost curves the regulator decides about the fulfillment factor λ and lower (P) and upper (P) price bounds in the trading sector T . The objective is
to minimize expected total costs, consisting of abatement costs in both sectors. As shown, if one
of the price bounds becomes binding, the fulfillment factor adjusts endogenously such that total
abatement is held constant. Denote
the endogenous fulfillment factor for the case of a binding
floor and ceiling by λ̃ P and λ̃ P , respectively. For given levels of λ, P, and P, there will be two
critical levels of the cost shock ηT for which the price control is binding which are defined and
denoted as:
h
i
∂CT λa, η
∂CT λa, ηT
T
and
− P = 0 ⇒ η λ, P, P
− P = 0 ⇒ η λ, P, P . (4)
∂AT
∂aT
The regulator’s optimizing problem can then be written as:
h
i
min C λ, P, P := E CT (λa, η) + CNT ({1 − λ}a, ηNT ) | η < ηT < η
n
o
+ E CT λ̃ P a, η + CNT 1 − λ̃ P a, ηNT ηT < η
T
n
o
+ E CT λ̃ P a, η + CNT 1 − λ̃ P a, ηNT ηT > ηT
(5)
λ ∈ (0, 1), P, P ≥ 0
The first line part of (5) represents expected total abatement cost in the case when neither
the price floor nor the ceiling is binding. In the second part, the price floor is binding and the
fulfillment factor is endogenously adjusted. The third line expresses the opposite case of binding
price ceiling. If the price floor is equal to zero and the ceiling set a level such that it becomes never
binding, the expected total abatement cost function (5) is equivalent to the expected abatement
csot function under pure quantity control (1). Consequently, the regulator’s problem of choosing
the fulfillment factor and price bounds includes the optimal solution under pure quantity control.
Thus, expected cost under additional price controls are bounded above by the cost of the pure
quantity scheme. Put differently, the introduction of price bounds can never increase expected
7
abatement cost but has the potential of decreasing them. It has to be mentioned, however, that this
does not necessarily holds in all ex-post states of the world, i.e., the there might be states in which
price bounds increase ex-post cost.
The respective first order conditions become (see Appendix B for derivation):9
"
#
∂CT ∂C NT
∂C
=E
−
=0
(6)
∂λ
∂AT ∂ANT
!
∂C
∂C NT 1
ηT ≤ η = 0
= E ∂2C P −
(7)
T
T
a 2
∂P
∂ANT ∂aT
!
∂C
∂C
1
NT = 0 .
η
≥
= E − ∂2C P −
η
(8)
T
T
T
∂A
NT ∂P
a ∂a2
T
By comparing the first order condition for the optimal fulfillment factor (6) with the one under
pure quantity control (3), we observe that they are equivalent. Thus, the choice of the optimal
fulfillment factor is independent of the possible introduction of permit price bounds in the trading
sector. The first order conditions for the optimal price floor (7) (ceiling(8)) requires the equalization of the non-trading sector’s MAC with the price floor (ceiling) in expectations conditional on
the fact the price bound is binding.
Proposition (1) implies a lower and upper bound on the optimal price floor and ceiling. It states
that every price floor (ceiling) below (above) the first-best optimal permit price does not increase
abatement cost. Consequently, a price floor (ceiling) equal to the lowest (highest) first-best permit
price cannot increase abatement cost. The results are summarized in the following proposition:
Proposition 2. Under a hybrid regulation scheme in which the regulator imposes a quantity regulation in one sector and announces price bounds on the corresponding permit price:
(a) The ex-ante optimal fulfillment factor λ∗ex-ante is identical to the one under pure quantity control.The regulator chooses λ∗ex-ante such that the (unconditional) ex-ante expected difference
of marginal abatement costs across partitions is zero.
(b) The optimal ex-ante price floor (ceiling) is bounded below (above) by the lowest (highest)
first best (ex-post) optimal permit price.
(c) The expected cost under quantity regulation with price bounds are lower equal the expected
cost under pure quantity control.
Summarizing, we showed that the regulator can impose a price collar bounded by the lowest
and highest first-best permit price and will weakly decrease expected total abatement cost. However, that does not necessarily imply that ex-post abatement cost are always lower than under pure
quantity regulation. The result is derived under following main assumptions: First, the total abatement requirement is constant. While it is well known that an constant abatement effort is likely to
9
In the current version we assume the disturbance terms to be independently distributed.
8
lead to ex-post inefficiencies in term of deviating marginal abatement cost and marginal damage,
the assumption reflects a likely situation in a real world policy design in which the choice of the
target and the instruments is often separated. Second, the partition of the regulation system is
exogenously given, i.e., the regulator cannot change the assignment of firms to the different partitions. In a realistic policy environment such an partition is often influenced by monitoring cost
and political feasibility. Therefore, policy makers need to determine the partition and afterwards
determine the instruments. Third, the regulator is able to implement a rationing mechanism that
ex-post shifts abatement burden from one sector to the other. In the case of two parallel trading
systems, this is easily be achieved by converting permits of one system into the ones of the other.
In the case of an tax instrument, the resulting tax change has to be calculated. Whether such an
mechanism is political feasible depends on the associated change in expected cost and, moreover,
on the shift of price risks from one sector to the other. Forth, the regulator has access to a distribution of abatement cost. In an ex-ante assessment of political measures, MAC are always subject to
some uncertainty. Therefore, impact assessment usually perform sensitivity analysis of the most
important parameters. Such sensitivity analysis can be easily extended to provide distributions of
marginal abatement cost curves.
3. Numerical Framework
3.1. Marginal Abatement Cost Functions
Our numerical analysis requires a distribution of marginal abatement cost curves. In the case
of carbon abatement, such functions are usually derived in a top-down way using Computable
General Equilibrium (CGE) models. A series of carbon taxes is imposed in the sector of interest.
Given the resulting abatement, a MAC function can be derived by fitting a continuous curve on the
series of tax and abatement pairs (e.g Klepper & Peterson, 2006; Böhringer & Rosendahl, 2009;
Böhringer et al., 2014).
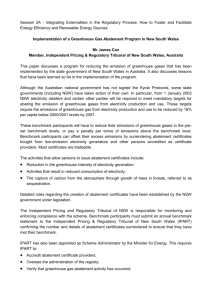
For the derivation of MAC curves, we apply standard static multi-sector, multi-region CGE
model.10 . The model relies on nested Constant Elasticity of Substitution (CES) functions with the
nesting structure shown in Figure 3.1 in which the σ indicate the respective substitution elasticity. For production sectors, we combine materials with an aggregate of value-added, i.e., a capital
labor bundle, and an energy composite which combines electricity with a bundle of fossil fuels.
On the consumption side, non-energy and energy-consumption bundles are combined to the final consumption commodity. Government and investment are included using Leontief functions.
International trade is modeled using the Armington (1969) approach, i.e., domestic and imported
commodities are treated as imperfect substitutes. The model is closed assuming a constant balance
of payment and a fixed investment closure.
The model is parameterized on the GTAP database (Narayanan et al., 2012) database, which
is aggregated to a European and rest of the world region. Energy sectors (electricity, coal, natural gas, refined oil, crude oil) are represented in a detailed manner while the remain sectors are
aggregated to energy intensive production, agriculture, services, transport, and manufacturing. In
10
A full algebraic description of the model is provided in Appendix C
9
Figure 2: Functional Forms
Y
σtop
VAE
vae
...
σ
VA
va
...
...
ENE
ene
σ
K
Materials
C
σ
L
ELE
FOF
COA
PC
σctop
CENE
cene
σfof
CCON
ccon
σ
...
GAS
σ
Energy Commodities
(a) Production
...
...
Non-Energy Commodities
...
(b) Final Consumption
the calibration of the CES function substitution elasticities enter as free parameters. Beside the
elasticities in Figure 3.1, elasticities for the Armington approach are needed. The Central column
in Table 1 lists the substitution elasticities and assumed parameter values in the model which are
in line with the literature (e.g. Paltsev et al., 2005b). Narayanan et al. (2012) provides Armington
elasticities and substitution elasticities for the value-added bundle.
Table 1: Parameter values for substitution elasticities in production and consumption
Parameter
Production
σYTOP
σYMAT
σKLE
σKL
σENE
σFOF
Consumption
σtop
σene
σoth
Description
Materials vs. energy/value-added bundle
Materials
Value-added vs. energy bundle
Capital vs. labor
Primary energy vs. electricity
Fossil fuels
Energy vs. non-energy consumption
Energy commodities
Non-energy commodities
Central
Min
Max
0
0.50
0.8
0.30-1.50
0.30
0.50
0
0
0.4
1
1
1.6
0
0.1
1
0.9
0.5
0.5
0.5
0.9
0.9
0.9
0.1
0.1
0.1
3.2. Quantitative Approach
Given a distribution of MAC curves, we compute the first-best optimum as well as the secondbest optimum of pure quantity control with and without additional price bounds.11 . The computation of the first-best and second-best under pure quantity solution is done using standard techniques
11
The computational approach is described in greater detail in Appendix D
10
of non-linear programming by minimizing expected abatement cost (1) under respective choice
variable. However, the computation of optimal price bounds in (5) is not as straight forward as
the condition in the expectation operator, i.e., the bounds of the integrals, need to be chosen. Our
strategy formulates the problem as Mathematical Program under Equilibrium Constraints (MPEC)
(Luo et al., 1996). As this class of problems is generally difficult to solve, we use Proposition 2
to first compute the optimal fulfillment factor under pure quantity control. Given the fulfillment
factor and an exogenous price floor and ceiling, we reformulate the problem as an Mixed Complementarity Problem (MCP) which can be easily solve. We the used the boundaries on the optimal
price bounds derived in Proposition 2 and perform grid search about the relevant range of price
floor and ceiling to find the cost minimal solution.
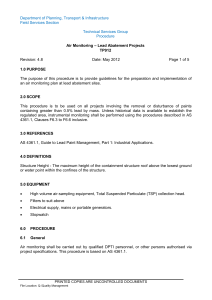
Figure 3: Marginal Abatement Cost Curves
Dotted lines and dark shaded areas represent expected value and 25 to 75% interval, respectively.
4. Minimum Prices in the European Emission Trading System
We analyze the introduction of price bounds in the EU ETS under parameter uncertainty in the
used policy assessment tool, i.e., the CGE model. As substitution elasticities are most influential
for the results and difficult to estimate as precise values depend on the model structure, there is a
high degree of parameter uncertainty regarding the choice of these elasticity. We thus, consider
the elasticities as uncertain and uniformly distributed between the minimum and maximum values
provided in Table 1. For value provided by Narayanan et al. (2012), i.e., Armington and value
added elasticities, we assume that they might change from half to 1.5 times the value provided. We
11
create a distribution of marginal abatement cost curves by randomly drawing all elasticities from
the respective distributions and imposing a carbon tax from zero to 150 $/tCO2 in the respective
sectors assuming lumpsum revenue recycling. The resulting tax-abatement pairs are then fitted
using the least square method assuming marginal abatement cost curves to be cubic in abatement.
Using a second draw, we then calculate the marginal abatement cost function for the next sector,
i.e., for each sectors’ function the elasticity are independently sampled. Following the design of
the EU ETS, we consider electricity, refined oils, and energy intensive industries to be part of the
trading system. All remaining sectors including final consumption are then part of the non-trading
sector.
Figure 4: Distribution Ex-post Abatement Cost
(a) Total
(b) Trading
(c) Non-Trading
Figure 3 show the resulting MAC curves using 1000 sample draws considering a policy to
reduce 30% of the benchmark carbon emissions which approximately equals 1000 MtCO2 . The
curve of the trading sector runs from the lower right right to the left. The dotted lines represented
the median value while the dark shaded area indicate the 25 to 75% quantiles, respectively. It
becomes evident that the variation in the estimates increases with the abatement requirement.
Figure 3 suggest that the main abatement burden is imposed on the trading sector. This result is
mainly caused by the inclusion of the transport sector and final consumption into the non-trading
sector. The European transport sector is already subject to high fuel tax causing high tax interaction
costs (Paltsev et al., 2005a; Abrell, 2010). Furthermore, we exclude non-CO2 greenhouse gases in
particular methane emissions of agriculture which have a high abatement potential (Hyman et al.,
2002).
The main results are summarized in Table 2 showing the resulting expected abatement cost,
the fulfillment factor, and carbon prices as well as the standard deviations thereof. In the first-best
optimum the total abatement cost become 25.13 Billion $ which are mainly imposed on the trading
sector (17.5 Billion $). The standard deviation of total cost realizes at 5.35 Billion $ with standard
deviation of 3.21 Billion $ in the trading sector. Figure 4 shows the distribution of abatement
cost. The expected carbon price is 67.44 $/tCO2 with a standard deviation of 12.05 $/tCO2 and the
distribution of carbon prices is shown Figure 5. The minimum and maximum first-best optimal
carbon price are 43.35 and 108.11 $/tCO2 , respectively.
The second-best optimum under pure quantity control increases the expected abatement cost
by 0.42 Billion $. As the 76% of the abatement burden is allocated to the trading sector and as
12
Figure 5: Distribution Ex-post Carbon Prices
(a) Trading
(b) Non-Trading
The y-axis showing the frequency is capped at 100. The frequency of a binding price floor (ceiling) is 270 (170).
Table 2: Expected cost and carbon prices under different regulatory instruments
Expected Cost [Billion $]
First-Best
Pure Quantity
Price Collar
Trading
Non-Trading
Total
17.496 (3.213)
7.630 (2.350)
25.126 (5.355)
Trading
Non-Trading
Trading
Non-Trading
Trading
Non-Trading
67.44 (12.05)
67.44 (12.05)
43.35
43.35
108.11
108.11
17.900 (5.516)
7.650 (1.072)
25.550 (5.560)
75.8%
68.55 (10.19)
68.55 (19.20)
37.22
49.05
151.04
105.88
17.625 (3.273)
7.678 (2.860)
25.303 (5.404)
75.8%
67.86 (12.37)
67.84 (16.25)
54.69
25.52
86.75
147.54
Fulfillment Factor [%]
Expected Price [$/tCO2]
Minimum Price [$/tCO2]
Maximum Price [$/tCO2]
Standard deviation are given in parenthesis. Highlighted cells contain price floor and ceiling.
the uncertainty in the MAC estimated is increasing in the abatement effort, the cost uncertainty
in this sector is increasing as indicated by the increase in the trading sector’s standard deviation
of cost. The effect also becomes evident inspecting the cost distributions in Figure 4: While the
cost distribution is narrowing the in non-trading sector, extreme cost events become more likely in
the trading sector. The expected permit price increases by around 3 $/tCO2 . The minimum (maximum) price in the trading sector lies below (above) the counterpart in the first-best equilibrium
indicating the potential of cost savings by introducing additional price control.
Allowing for the additional introduction of permit price bounds in the trading sector, reduces
the excess cost of second-best regulation to 0.18 Billion$. Put differently, the introduction of a
price floor and ceiling decreases the excess cost of second-best regulation by around 58%. The
optimal price floor an ceiling are set to 54,69 and 86,75 $/tCO2 . As it becomes evident in Figure
13
Figure 6: Cost Difference Pure Quantity Control without and with Price Bounds
The y-axis showing the frequency is capped at 100. The frequency of zero cost savings is 558.
4 the price bounds decrease expected cost in the trading sector. In particular, the cost distribution
in the trading sector narrows, i.e., the uncertainty about future cost is reduced as also shown by an
40% decrease in the standard deviation. As a consequence the cost uncertainty in the non-trading
sector increase and expected non-trading sector cost are also increasing. The imposition of permit
price bounds becomes most evident in distribution of the trading-sector’s carbon price in Figure
5 which shows a high probability mass at the minimum and maximum price. The probability of
binding price floor (ceiling) becomes 27% (17%). In contrast, the price distribution in the nontrading sector is widening. However, the expected price in both sector is increasing.
As noted, the introduction of a permit price collar does not necessarily leads to an decrease of
total abatement cost in all states of the world. Figure 4 shows the distribution of the cost savings
due to the introduction of price bounds. Naturally, the distribution shows a high mass at zero cost
savings, i.e., the probability of non-binding price controls is 56%. With a probability of 39% cost
savings are realized, however, with a 5% probability cost are increasing. In total, expected cost
savings are equal to 0.25 Billion $.
Summarizing,the introduction of price bounds decreases the excess cost due to uncertainty by
approximately one half. The regulator uses the additional instrument to decrease cost uncertainty
in the trading sector at the expense of increasing uncertainty in the non-trading sector. This behavior makes intuitively sense, as the trading sector is bearing the main abatement burden. As
uncertainty is increasing in the abatement burden, the trading sector is also bearing the main un14
certainty which is decreased using the price collar.
5. Conclusions
This paper examined the introduction of a permit price collar in a hybrid regulation scheme
under uncertainty over future marginal abatement cost. Assuming a constant abatement burden,
a binding price floor or collar implies shifting abatement burden from one regulation scheme to
the other. Thus, the price collar introduces state contingency of the ex-post abatement burden.
We showed that the mechanism has the potential to decrease expected abatement cost in a save
way, i.e., without the risk of increasing expected cost. In order to implement such an scheme the
regulator needs to have access to an estimate of the distribution of abatement cost functions in the
respective sectors. As such uncertainty assessments are part of nearly policy impact assessments,
we see this as an rather low information requirement.
We quantitatively analyzed the implications of introducing price bounds in a stylized model of
the EU ETS. The results show that the excess cost of regulation under uncertainty can be reduced
by approximately one half. As the trading sector carries the main abatement burden and the optimal allocation of the abatement burden and as uncertainty in the abatement cost is increasing in
the abatement burden, the trading sector also bears the main cost uncertainty in a pure emission
trading system. The optimal price bounds decrease this uncertainty at the expense of increasing
the risk in the non-trading sector.
Acknowledgments
We thank Renger van Nieuwkoop we very helpful discussions and constructive comments.
We acknowledge the support of the Swiss Competence Centers for Energy Research, Competence
Center for Research in Energy, Society and Transition (SCCER-CREST) and the Commission for
Technology and Innovation (CTI).
References
Abrell, J. (2010). Regulating CO2 emissions of transportation in europe: a cge-analysis using market-based instruments. Transportation Research Part D: Transport and Environment, 15, 235–239.
Armington, P. (1969). A theory of demand for products distinguished by place of production. International Monetary
Fund Staff Papers, 16, 159–76.
Böhringer, C., Dijkstra, B., & Rosendahl, K. E. (2014). Sectoral and regional expansion of emissions trading. Resource and Energy Economics, .
Böhringer, C., Hoffmann, T., & Manrique-de Lara-Penate, C. (2006). The efficiency costs of separating carbon
markets under the eu emissions trading scheme: A quantitative assessment for germany. Energy Economics, 28,
44–61.
Böhringer, C., & Rosendahl, K. E. (2009). Strategic partitioning of emission allowances under the eu emission trading
scheme. Resource and energy economics, 31, 182–197.
Caillaud, B., & Demange, G. (2005). Joint desing of emission tax and trading systems. PSE Working Paper, 2005-03.
Collinge, R. A., & Oates, W. E. (1982). Efficiency in pollution control in the short and long runs: A system of rental
emission permits. Canadian Journal of Economics, 15, 346–354.
Commission, E. (2008). The 2020 climate and energy package. http://ec.europa.eu/clima/policies/package/index en.htm,
accessed on Jan 2015.
15
Commission, E. (2014). Proposal for a decision of the european parliament and of the council concerning the establishment and operation of a market stability reserve for the union greenhouse gas emission trading scheme and
amending directive 2003/87/ec. http://ec.europa.eu/clima/policies/ets/reform/docs/com 2014 20 en.pdf.
Dijkstra, B. R., Manderson, E., & Lee, T.-Y. (2011). Extending the sectoral coverage of an international emission
trading scheme. Environmental and Resource Economics, 50, 243–266.
Dirkse, S. P., & Ferris, M. C. (1995). The PATH solver: a non-monontone stabilization scheme for mixed complementarity problems. Optimization Methods and Software, 5, 123–156.
Drud, A. (1985). CONOPT: A GRG code for large sparse dynamic nonlinear optimization problems. Mathematical
Programming, 31, 153–191.
Hyman, R., Reilly, J., Babiker, M., Valpergue De Masin, A., & Jacoby, H. (2002). Modeling non-co2 greenhouse gas
abatement. Environmental Modeling and Assessment, 8, 175–186.
Klepper, G., & Peterson, S. (2006). Marginal abatement cost curves in general equilibrium: The influence of world
energy prices. Resource and Energy Economics, 28, 1–23.
Luo, Z.-Q., Pang, J.-S., & Ralph, D. (1996). Mathematical programs with equilibrium constraints. Cambridge
University Press.
Mathiesen, L. (1985). Computation of economic equilibria by a sequence of linear complementarity problems. Mathematical Programming Study, 23, 144–162.
Narayanan, G., Badri, A., & McDougall, R. (Eds.) (2012). Global Trade, Assistance, and Production: The GTAP 8
Data Base. Center for Global Trade Analysis, Purdue University.
Paltsev, S., Jacoby, H. D., Reilly, J. M., Viguier, L., & Babiker, M. (2005a). Transport and climate policy modeling
the transport sector: The role of existing fuel taxes in climate policy. Springer.
Paltsev, S., Reilly, J. M., Jacoby, H., Eckhaus, R., McFarland, J., Sarofim, M., Asadoorian, M., & Babiker, M. (2005b).
The MIT emissions prediction and policy analysis (EPPA) model: Version 4. MIT Joint Program on the Science
and Policy of Global Change, Report 125, Cambridge, MA.
Pizer, W. A. (2002). Combining price and quantity controls to mitigate global climate change. Journal of Public
Economics, 85, 409–434.
Roberts, M. J., & Spence, M. (1976). Effluent charges and licenses under uncertainty. Journal of Public Economics,
5, 193–208.
Rutherford, T. F. (1995). Extension of GAMS for complementarity problems arising in applied economics. Journal
of Economic Dynamics and Control, 19, 1299–1324.
Unold, W., & Requate, T. (2001). Pollution control by options trading. Economics Letters, 73.
Weitzman, M. L. (1974). Prices vs. quantities. The Review of Economic Studies, 41(4), 477–491.
16
Appendix
Appendix A. Proof of Proposition 1
We proof the first part of the proposition for the case of price floor. For a price ceiling, the
proof proceeds along the same reasoning.
We distinguish two cases. First, if Pmin ≤ PT , the price floor is non-binding, and hence does
not affect firms’ abatement behavior. Consequently, abatement in each sector stays constant and
total abatement cost are unchanged.
Second, with a binding price floor (Pmin > PT ) , a constant environmental target (de = 0)
implies that the change of abatement in one of the sectors needs to be offset by the change in the
T
other.daT = −daNT . The first-order condition for emissions abatement in sector T is PT = ∂C
∂aT
implying that a change of the permit price in sector T leads to a change in abatement:
daT =
dPT / ∂∂aC2T . The corresponding change of the fulfillment factor is given by dλ = dPT / ∂∂aC2T a . Thus,
T
T
an increase in the price floor induces an increase in the fulfillment factor, i.e., more abatement in
the trading sector. Differentiating the regulator’s
h ∂Cobjective
i(1) for a given state with respect to the
∂C NT
∂C
T
price in sector T and substituting yields: ∂PT = ∂aT − ∂aNT ∂21CT = [PT − PNT ] ∂21CT . Introducing a
2
2
∂a2
T
∂a2
T
binding price floor below the optimal price implies that PT < PNT . As ∂Ci /∂ai > 0 and ∂2Ci /∂a2i >
∂C
0, it follows that ∂P
> 0. Hence, introducing a binding price floor decreases total abatement costs.
T
Appendix B. Derivation of first-order conditions for regulator’s optimization problem (5)
Using Leibniz’s rule, the derivative of the expected cost function with respect to the fulfillment
factor becomes:
#
Z η(λ) "
∂η
∂C
∂CT ∂C NT
=
−
f (η) dη + f (η) (CT + C NT )
∂λ
∂AT ∂ANT
∂λ
−b
η=η, λ=λ∗
#
Z η(λ) "
∂η
∂CT ∂C NT
−
f (η) dη − f (η) (CT + C NT )
+
∂AT ∂ANT
∂λ
η(λ)
η=η, λ=λ∗
"
#
Z
b
∂η
∂CT ∂C NT
+ f (η) (CT + C NT )
+
−
f (η) dη
∂λ
∂ANT
η(λ) ∂AT
η=η, λ=λ∗
∂η
− f (η) (CT + C NT )
∂λ
η=η, λ=λ∗
#
Z b"
∂CT ∂C NT
=
−
f (η) dη
∂ANT
−b ∂AT
"
#
∂CT ∂C NT
=E
−
∂AT ∂ANT
17
Similarly, the derivative with respect to the price floor is given as:
#
"
Z η(λ)
∂η
∂C
∂λ ∂CT ∂C NT
−
f (η) dη + f (η) (CT + C NT )
=
∂P
∂P ∂AT ∂ANT
∂P
−b
η=η, λ=λ∗
∂η
− f (η) (CT + C NT )
∂P
η=η, λ=λ∗
"
#
Z η(λ)
∂λ ∂CT ∂C NT
=
−
f (η) dη
∂P ∂AT ∂ANT
−b
!
∂C NT 1
= E ∂2C P −
η ≤ η
a 2T
∂ANT ∂a
T
Where we used the first order condition of the trading sector in the case of binding price constraint
and the derivative of the fulfillment factor with respect to a price constraint (derived in Proposition
1). The derivative of the expected cost function with respect to the price ceiling can be equivalently
derived.
Appendix C. Equilibrium conditions for Numerical General Equilibrium Model
In this Appendix we present the equilibrium conditions of the macro-economic CGE model.
We employ numerical methods to solve for general equilibrium prices and quantities. More specifically, we formulate the model as a system of nonlinear inequalities and represent the economic
equilibrium through two classes of conditions: zero profit and market clearance. The former class
determines activity levels and the latter determines price levels. In equilibrium, each of these variables is linked to one inequality condition: an activity level to an exhaustion of product constraint
and a commodity price to a market clearance condition. Following Mathiesen (1985) and Rutherford (1995), we formulate the model as a mixed complementarity problem. A characteristic of
many economic models is that they can be cast as a complementary problem, i.e. given a function
F: Rn −→ Rn , find z ∈ Rn such that F(z) ≥ 0, z ≥ 0, and zT F(z) = 0, or, in short-hand notation,
F(z) ≥ 0 ⊥ z ≥ 0. The complementarity format embodies weak inequalities and complementary
slackness, relevant features for models that contain bounds on specific variables, e.g. activity levels which cannot a priori be assumed to operate at positive intensity. Numerically, we solve the
model in GAMS using the PATH solver (Dirkse & Ferris, 1995).
According to Figure 3.1 we define the expenditure function cCON as:
h
i 1ctop
ctop
ctop
cCr := θCON
(cCENE
)1−σ + 1 − θCON
(cCCON
)1−σ 1−σ
r
r
r
r
!1−σcene 1−σ1cene
X
PAE
ir
CENE
cCENE
:=
θ
r
ir
pae
ir
i∈cene
! ccon 1
X CON PAEir 1−σ 1−σccon
CCON
θir
cr
:=
pae
ir
i∈ccon
18
(C.1)
(C.2)
(C.3)
cCr denotes the private expenditure function in region r and cCENE
and cCCON
the sub-level expenr
r
CON
diture functions. θ generally refers to share parameters. Thus, θr
denotes the budget share of
energy commodities in the total expenditure of the consumer living in region r. Similarly, θCENE
ir
and θCON
refer
to
the
expenditure
share
of
commodity
i
in
the
energy
and
non-energy
expendiir
ture in region r. The set ene and con are used to identify energy and non-energy consumption
commodities. PAEir denotes the tax inclusive Armington prices defined as:12
PAEir := (1 + tiir ) PAir
(C.4)
Prices denoted with an upper bar generally refer to baseline prices observed in the benchmark
equilibrium.
Unit cost functions for productions are given as:
1top
!1−σtop
X
X
1−σ
PAE
top
jr
ytop
ytop
V
AE
1−σ
cir :=
− 1 −
θ jir
θ jir (cir )
pae
jr
j∈mat
j∈mat
h
i 1vae
vae
vae
cVir AE := θirV AE (cVir A )1−σ + 1 − θirV AE (cirENE )1−σ 1−σ
1−σva
1−σva 1−σ1 va
(1
+
tl
)PL
(1
+
tk
)PK
ir
r
ir
r
cVir A := θirV A
+ 1 − θirV A
plir
pkir
1−σ1ene
!1−σene
X
X
PAE
ene
jr
ENE
FOF 1−σ
1 −
cirENE :=
θ ENE
+
θ
(c
)
jir
jir
pae
jr
j∈ele
j∈ele
!1−σ f o f 1−σ1f o f
X
PAE
jr
cirFOF :=
θ FOF
jir
pae
jr
j∈ f o f
(C.5)
(C.6)
(C.7)
(C.8)
(C.9)
For government and investment consumption, fixed production shares are assumed:
cGr :=
X
θGir
PAEir
paeir
(C.10)
θirI
PAEir
paeir
(C.11)
i
crI :=
X
i
Trading commodity i from region r to region s requires the usage of transport margin j. Accordingly, the tax and transport margin inclusive import price for commodity i produced in region
r and shipped to region s is given as:
PMirs := (1 + teir ) PYir + φTjirs PT j
12
(C.12)
The price also includes carbon cost which we skip for the ease of notation. Furthermore, taxes are differentiated
by agent which we also neglect in the algebraic exposition in order to suppress an additional index.
19
teir is the export tax raised in region r and θTjirs is the amount of commodity j needed to transport
the commodity. We assume that imports from different regions are imperfect substitutes as well
as the import commodity bundle is and imperfect substitute to domestic produced commodities.
Thus, the unit cost index for the Armington commodity becomes:
h
i 1dm
dm
dm
cirA := θirA PYir1−σ + 1 − θirA (cirM )1−σ 1−σ
!1−σm 1−σ1 m
X
PM
is
cirM := θisM (1 + tmir )
pm
is
s
(C.13)
(C.14)
International transport services are assumed to be produced with transport services from each
region according to a Cobb-Douglas function:
Y θT
cTi :=
PYisis
(C.15)
s
According to these function definitions, the zero-profit conditions for the model can be written
as:
cir ≥ PYir
⊥ Yir ≥ 0
∀i, r
(C.16)
cCr
cGr
crI
cirA
cTi
≥ PCr
⊥ Cr ≥ 0
∀r
(C.17)
≥ PGr
⊥ Gr ≥ 0
∀r
(C.18)
≥ PIr
⊥
Ir ≥ 0
∀r
(C.19)
≥ PAir
⊥
Air ≥ 0
∀i, r
(C.20)
≥ PT i
⊥ Ti ≥ 0
∀r
(C.21)
Yir denotes the production index of sector i in region r. Cr is the consumption index and PCr the
corresponding consumer price index in region r. Similarly, Gr and Ir are the public and investment
activity indexes and PGr and PIr the corresponding price indexes. Air is the Armington index and
T i the production evel of international transport service i
Denoting consumers’ initial endowments of labor and capital as Lr and K r , respectively, and
20
using Shephard’s lemma, market clearing equations become:
Yir
Air
Lr
Kr
X ∂cA
∂cTi
is
≥
Ais +
Ti
∂PYir
∂PYir
s
X ∂c jr
∂cCr
∂cGr
∂crI
≥
Y jr +
Cr +
Gr +
Ir
∂PAir
∂PAir
∂PAir
∂PAir
j
X ∂cir
≥
Yir
∂PLr
i
X ∂cir
≥
Yir
∂PKr
i
Ti ≥
X ∂cAjr
j,r
∂PT i
A jr
Ir ≥ ir
INCrC
Cr ≥
PCr
INCrG
Gr ≥
PGr
⊥
PYir ≥ 0
∀i, r
(C.22)
⊥
PAir ≥ 0
∀i, r
(C.23)
⊥
PLr ≥ 0
∀r
(C.24)
⊥
PKr ≥ 0
∀r
(C.25)
⊥
PT i ≥ 0
∀r
(C.26)
⊥
PIr ≥ 0
∀r
(C.27)
⊥
PCr ≥ 0
∀r
(C.28)
⊥
PGr ≥ 0
∀r
(C.29)
ir is the investment level in the benchmark equilibrium which is assumed to be constant across all
scenarios; INCrC and INCrG are the private and public income in region r. Private income is given
as factor income net of investment expenditure and a lumpsum or direct tax payment to the local
government, htaxr . Public income is given as the sum of all tax revenues:
INCrC :=PLr Lr + PKr K r − PIr ir − htaxr
C
G
I
X
X ∂c jr
∂c
∂c
∂c
r
r
r
INCrG :=
tiir PAir
Y jr +
Cr +
Gr +
Ir
∂PAir
∂PAir
∂PAir
∂PAir
i
j
"
#
X
∂cir
∂cir
+
Yir tlr PLr
+ tkr PKr
∂PLr
∂PKr
i
"
#
A
X
∂cis
∂cirA
+
teir PYir
Ais + tmir (1 + teis ) PYis
Air
∂PYir
∂PYis
i,s
+ htaxr
(C.30)
(C.31)
(C.32)
(C.33)
(C.34)
Appendix D. Computational Strategy for Price-Bound Computation
Marginal abatement cost functions of the trading and non-trading sector i ∈ {T, NT } are assumed to be cubic. Accordingly, we define the total and marginal abatement cost functions for a
21
given state of the world s ∈ S as:
αis 2 βis 3 γis 4
A + A + A
2 is 3 is 4 is
Cis0 (Ais ) := αis Ais + βis A2is + γis A3is ,
Cis (Ais ) :=
(D.1)
(D.2)
where the coefficients αis , βis , and γis are obtained by our sampling procedure (see Section 3.1)
and Ais denotes abatement taking place in sector i in state s. The probability of state s is denoted
P
as π s and sums to one over all states ( s π s = 1).
Appendix D.1. First-Best
In the first-best situation, the regulator is able to choose abatement for each sector in each state
of the world. I.e., the regulator directly chooses Ais minimizing expected total abatement cost by
fulfilling the total abatemetn requirement a:
X X
min
πs
Cis (Ais )
(D.3)
s
s.t.
s
X
Ais ≥ a
(P s )
∀s
(D.4)
i
Ais ≥ 0
(D.4) ensures sufficient abatement in each state s and the associated dual variable P s is interpreted
as the (uniform) optimal first-best emission permit price. This states an non-linear problem (NLP)
which can be solved by standard techniques.13
Appendix D.2. Pure Quantity Control
In the second-best situation the regulator has to choose sectors’ abatement quantities before
the revelation of uncertainty. Denoting ex-ante abatement burdens by Ai , the regulator minimizes
total expected cost:
X X
min
πs
Cis (Ais )
(D.5)
s
s.t.
Xs
Ai ≥ a
(P)
(D.6)
∀i, s
(D.7)
i
(Pis )
Ais ≥ Ai
Ai , Ais ≥ 0
. (D.6) ensures that the total abatement requirement is achieved and the associated dual variable
P is the expected permit price. (D.7) ensures that abatement in each scenario equals the ex-ante
chosen sectoral requirements. The associated dual variable are sectoral ex-post carbon prices. This
NLP can also be solved using standard techniques.
13
We use the CONOPT solve (Drud, 1985) to solve NLP problems.
The problem is separable in the set of states. Thus, it could be solved by equating MAC for each state separately.
22
Appendix D.3. Quantity Control with Price Bounds
Extending the set of choice variables by allowing for price bounds and an associated rationing
mechanism, requires choosing the condition (i.e. the integral bounds) in (5). Put differently, we
need to implement a rationing mechanism that shifts abatement burden from one sector to the
other in the case of a binding price bound. Let P and P denote the the upper and lower permit
price bound in the trading sector T and µ and µ s the respective rationing factors. The regulator’s
s
problem of minimizing expected total abatement cost becomes:14
X X
min
πs
Cis (Ais )
(D.8)
s
s.t.
Xs
Ai ≥ a
(P)
(D.9)
i
AT s ≥ AT + µ s − µ s
A(NT )s ≥ A(NT ) − µ s − µ s
⊥
⊥
PT s ≥ P
PT s ≥ 0
∀s
(D.10)
P(NT )s ≥ 0
∀s
(D.11)
⊥ µ ≥0
∀s
(D.12)
⊥ µs ≥ 0
∀s
(D.13)
s
P ≥ PT s
P, P, Ai , Ais ≥ 0
. Again, (D.9) ensures that the ex-ante allocation of the abatement burden complies with the total
abatement requirement. (D.10) and (D.10) ensure that the ex-post abatement is aligned to the exante abatement burden allocation. In that sense they are similar to (D.7) in the pure quantity control
case. However, they are formulated as complementarity constraints in order to allow for a explicit
representation of the dual variables, i.e. prices, which are restricted by the price bounds. Moreover,
they also include the rationing factors which are determined by the price constraints (D.12) and
(D.13). If, e.g., the price floor becomes binding, complementarity requires that µ > 0 becomes
s
positive and, as long as the upper bound lies above the lower, µ s = 0. Thus, the abatement burden
in the T (NT ) sector is increasing (decreasing) and, in turn, the price in the T sector is increasing.
Problem (D.8) to (D.13) falls in the class of Mathematical Problems under Equilibrium Constraints (MPEC) for which no stable general solution algorithm exists (Luo et al., 1996). Thus,
we make use of Proposition 2 to transform the program into a Mixed Complementarity Problem
(MCP) and use grid search to find optimal prices.15 From Proposition 2 (a) we know that the optimal abatement allocation is equal under quantity control with and without bounds. Consequently,
we use the pure quantity control program (D.5) to (D.7) to compute to optimal ex-ante abatement
allocation and eliminate the upper level constraint (D.9). The first order conditions of firms imply
(weak) equality of marginal cost and carbon prices. Consequently, given the ex-ante allocation
14
We use the perpendicular sign ⊥ to denote complementarity, i.e., f (x) ≥ c
0, x ( f (x) − x) = 0
15
We use the PATH solver for MCP problems (Dirkse & Ferris, 1995).
23
⊥
x ≥ 0 ⇔ f (x) ≥ c, x ≥
and permit price bounds in the T sector, the equilibrium is formulated as:
AT s ≥ aT + µ s − µ s
⊥ PT s ≥ 0
A(NT )s ≥ a(NT ) − µ s − µ s
⊥ P(NT )s ≥ 0
Cis0
∀s
(D.14)
∀s
(D.15)
PT s ≥ p
⊥ µ ≥0
∀s
(D.16)
p ≥ PT s
(Ais ) ≥ Pis
⊥ µs ≥ 0
⊥ Ais ≥ 0
∀s
∀i ∈ T, NT , s
(D.17)
(D.18)
(D.19)
s
, where (D.18) is the sectors’ first order or zero-profit condition which determines the abatement
amount. To derive optimal price bounds, we perform grid search for the price bounds and compare
total cost. The relevant range for our search is given by Proposition 2 (c).
24