5. Linear and Nonlinear (Time-Invariant) Electrical Elements
advertisement
 Electrical Elements")
5.
Linear and Nonlinear (Time-Invariant)
Electrical Elements
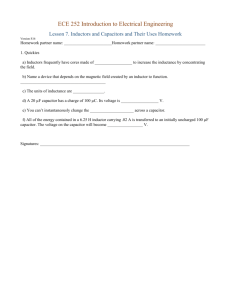
An electrical source is a physical device with two terminals for connection to
other electrical elements and sources. An ideal source provides a voltage across
its terminals (or fixed current through its terminals) that is independent of the
current drawn from it (voltage that exists across its terminals). Constant-valuedand periodic- (sinusoidal) waveforms are the common waveforms for ideal
electrical sources (Fig. 5.1) The current (voltage) supplied by an ideal voltage
source (current source) depends only upon the electrical elements or load
connected to the source. The instantaneous power p (t) supplied by a source
(with the voltage v s (t) polarity and current i (t) direction as shown in the
figure) is given by:
s
s
p (t) = v s (t)i (t)
s
(5.1)
s
5.1 Introduction to the chapter.
and the energy E s (t 0 ) delivered by the source up to time to is given by:
In this chapter, we discuss time-invariant (TI) linear and nonlinear electrical
elements that are the building blocks for electrical circuits. In section 5.2, we
provide the definitions for ideal energy sources and discuss the implications of
such assumptions from a real-world perspective. Next, in section 5.3, we discuss
various electrical elements. The two key quantities, power and energy, are used
to define the various elements. The discussion leads to passive elements or
elements that consume power (lossy elements) or store power as energy and
return back later with no net loss of energy (lossless elements), and active
elements that generate energy. The energy storage property leads to what is
known as devices with memory. We first consider one-port and multi-port linear
and nonlinear memoryless devices and then move on to devices with memory.
These elements or building blocks can be used to form complex circuits and
dynamics as we discussed before and as we will see in later chapters.
Though the discussions in this chapter are on mostly TI passive devices, we
also discuss specific interconnection of some of these passive devices with
independent and or dependent sources that lead to complex one port circuits that
exhibit the passivity property. Such one port circuits and their models can be
used to design nonlinear controllers for plants that are unstable.
t0
E s (t 0 ) =
Energy, and energy generation, consumption, and or storage capability of
physical devices are very fundamental concepts that play very important role not
only in electrical engineering but in all other areas as well. In this section, we
look at the basic definition of an electrical source capable generating electrical
energy and the related terms such as electrical potential, power etc. and the interrelationship among them. These basic quantities will then be used to define
various electrical elements.
(5.2)
s
v s (t) = sin[ωt]; ω = 1rad / sec
1
+
i s (t)
v s (t)
v s (t)
+
i s (t)
0.5
0
v s (t)
-
v0
-0.5
-
t
t
-1
0
(a1)
5.2 Basic Concepts: Electrical Source, Power, and
Energy
∫ p (t)dt
−∞
(a2)
(b1)
4
8
(b2)
Figure 5-1. a1) & a2) Ideal voltage & current source; b1) & b2) Common
waveforms for the ideal electrical sources. We assume the power capacity of these
devices as infinite implying that the power delivered (for a given value of the
source) is solely determined by the elements connected to the sources and not by the
sources.
As the current supplied (voltage supplied) by an ideal voltage source (current
source) is dependent on the load connected to the source and not the source, the
instantaneous power supplied, and the energy supplied up to certain time can be
positive, zero, or negative. By placing certain constraints on the power drawn
from the source by the load, and the energy delivered by the source to the load,
we will be able to arrive at useful electrical network elements as we will see in
the next section. Further, the assumption that the supplied current in the case of
a voltage. source (or voltage, in the case of a current source) is solely
determined by the load, implies that an ideal source is capable of supplying huge
amounts of power and infinite amount of energy. This, of course, is not feasible
in the real world. We will look into physically meaningful models for electrical
sources after we define the various electrical elements.
the energy can be positive, zero of negative. However, we end up with a
restricted set for instantaneous power and energy as we introduce the notion of
physical realizability. Three important cases are:
1) p(t) ≥ 0 (and hence E(t) ≥ 0) for all t and all possible
v(t), i(t) waveforms;
2) p(t) = 0 (and hence E(t) = 0) for all t and all possible
v(t), i(t) waveforms;
∞
3)
E(∞) =
∫ p(τ)dτ = 0
for all square integrable waveforms
τ=−∞
v(t), i(t)
(5.5)
5.3 Linear and Nonlinear (Time-Invariant) Electrical
Elements
1
5.3.1 Passive (Lossless and Lossy) and Active Elements
i(t)
+
+
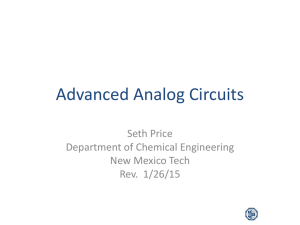
The simplest form of an electrical element is one with two terminals (one-port
element) as shown in figure 5.2a as a black box. In the figure, we have assumed
a certain polarity for the voltage v(t) and for the direction of flow of the current
i(t) for the elements that is different from the ones for independent sources. We
can also have multi-terminal (multi-port) elements with associated voltages and
currents as defined in Figures 5.2b and c. Such one-port and M-port elements
can be interconnected to form a M-port ( M > 1) circuit or network. The
instantaneous power p(t) delivered to an M-port element or network is given
by:
v(t)
-
v1 (t)
= ∑ p k (t)
+
1
i 1 (t)
1'
2
i 2 (t)
2'
v M (t)
k=1
+
M
M t0
E(t 0 ) = ∑ ∫ p k (t)dt
(5.4)
(b)
A General
Multi-port
Electrical
Element
i M (t)
M'
where pk (t) is the power entering through the k-th port. The energy delivered to
the M-port element at time t 0 is given by:
+
v M (t)
+
(5.3)
M
M
A Multi-port
Electrical
Element
(with common
ground)
M+1
(a)
p(t) = ∑ v k (t)i k (t)
k=1
v1 (t)
-
v 2 (t)
M
+
v 2 (t)
An Electrical
Element
(a two-terminal
device)
(c)
Figure 5-2. Block diagrammatic representation of electrical devices. a) One-port
device; b) Multi-port device with one common negative terminal; c) Multi-port
device with no common terminals.
k=1 −∞
If we consider the expression for power and energy without linking them to
any physical device or circuit, we may argue that the instantaneous power and/or
The first condition implies that we have a device or circuit that consumes
power all the time leading to continuous energy consumption. From the law of
energy preservation, we can infer that the electrical energy that has been
consumed by the device has been transformed into another form of energy (such
as heat). The second possibility implies that the device consumes no power at
any time. In the case of a one-port element this leads to the trivial cases of opencircuit and short-circuit elements. However, a number of multi-port devices
obeying this condition are possible. Here, the condition that power consumed is
zero all the time implies that finite, non-zero valued power may be entering any
one (or more) port(s) of the multi-port device, and the same amount of power
flows out through the other ports of the device. The third category corresponds
to the case where the power flowing into the device is stored in the device as
energy and returned back with net zero energy absorption. The elements
belonging to these three categories are known as passive elements. The first
category represents lossy memoryless elements, the second category represents
lossless memoryless devices, and the third category leads to lossless elements
with memory as we will see in the following pages. Elements which are not
passive are known as active elements.
5.3.2 One-Port Memoryless Devices
R
R
= R[i − Gv R ] ; G = R −1
=0
v R (t) = G i (t)
i (t) = R v R (t)
R
or
or
(5.7a)
R
R
M
= ∑ pk (t)
k =1
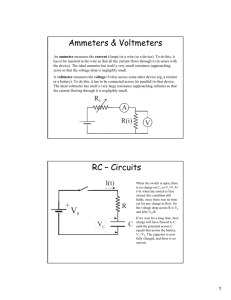
This corresponds to a straight line in the v-i (i-v) plane with a slope of R(G)
(Fig. 5.3). A device having such a property is known as a linear resistor where
R is the resistance (G the conductance). The two different equations in (5.7a)
simply indicate that neither one of the two variables, v R (t), i (t) can be the
independent variable with the other the dependent variable. The resistor
equation expressed in the discrete form when the current is the independent
variable and the voltage the dependent variable is:
R
v R (nT) = R i (nT)
R
(5.7b)
where T represents the sampling interval. The equation when the voltage is the
independent variable and the current the dependent variable is:
5.3.2.1 Passive, Active, linear and nonlinear resistors
The condition that a two-terminal element be memoryless can be satisfied if
a functional relationship between its voltage and current v(t), i(t) :
f[v,i] = 0 for all t
f[v R ,i ] = v R − Ri ; R> 0
(5.6)
exists. That is, depending upon the properties of f[.], we should be able to find
one response parameter (v(t) or i(t) ) at any given time t by a knowledge of the
other (source) parameter value at that time instant. It is a memoryless device
since its response at any given time depends on the source parameter value at
that time instance only and not at the source parameter values that might have
existed before. An element with a voltage-current relationship as given by
equation (5.6) where the condition that p(t) ≥ 0 for all t may or may not be
satisfied is known as a resistor.
We can note that p(t) ≥ 0 for all time t can be satisfied if the function f[v, i]
leads to a v-i characteristics that is confined to the first- and third-quadrants in
the v-i plane and pass through the origin. Since such a resistor consumes power
all the time, it can be called a lossy or passive resistor. We can have a number of
v-i characteristics that satisfy these requirements. Let us look at some of the
possibilities.
The simplest category is a functional relationship of the form:
i (nT) = G v R (nT)
R
(5.7c)
The symbol for a linear resistor is also shown in Fig. 5.3. It can be noted that
for a linear resistor, f[-v, -i] = -f[v, i] (anti-metric characteristic). This property
simply implies that the two terminals of a linear resistor can be interchanged
without affecting the characteristics of a circuit in which it is embedded. An
element having such a characteristic is known as a bilateral element.
The power consumed by a linear resistor is given by:
p (t) = vR (t)i (t)
R
R
= Gv (t)
2
R
(5.7d)
= R i (t)
2
R
That is, the power consumed by the linear resistor increases as the second power
of the applied source amplitude. In practice, we can expect the device to start
drawing more current (voltage) if the voltage (current) applied exceeds some
maximum value (linear relationship no longer holds) and eventually burn out.
Hence the concept of a linear resistor is an idealization of the real characteristics
of a physical device to make modeling and or analysis simpler.
When the value of R is negative, the element starts supplying power or
becomes an active element. Such a device is called a negative resistor.
perspective, lack of bilateral property implies that we cannot interchange the
terminals of a nonlinear resistor without affecting the behavior of the circuit in
which the nonlinear resistor is embedded. Of course, in situations where we
have the choice of selection, we may ask if the non-bilateral property is really
necessary and worth the trouble.
iR
+
i R (t)
slope = G
v R (t)
i R (or v R )
vR
(a)
+
(b)
vR
v R (t)
iR
slope = R
i R (t)
v R (or i R )
i Rmax
-
iR
v Rmax
(b)
vR
∂i
∂v R
(or R )
∂vR
∂i R
(a)
(c)
(d)
Figure 5-3. a) Symbol of a linear resistor; b) I/O functional relationship of a
linear resistor driven by a voltage source; c) Functional relationship when
driven by a current source; d) The characteristic of a non-ideal resistor.
(c)
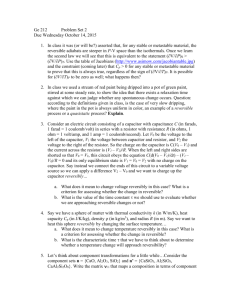
When the v-i characteristics of a resistor is not linear, we end up with a
nonlinear resistor. The general form of the v-i characteristics of a nonlinear
resistor is as shown in Fig. 5.4. In the figure, we have indicated the possibilities
that:
1) the characteristics and hence the device may not be bilateral;
2) the mapping from the input variable to the output variable may
be one-to-many or many-to-one. The former implies a
waveform which has infinite slope (or is discontinuous). The
later implies that the slope might be zero over a range of values
of the input variables and changes sign often.
Since the device may not be bilateral, the symbol for the nonlinear resistor
should indicate this property as shown in the fig. 5.4b. From a practical
v R (or i R )
Figure 5-4. a) Symbol of a nonlinear resistor; b) Typical v-i characteristic of
a nonlinear resistor; c) Small-scale resistance (or conductance) of a nonlinear
resistor.
Similar to the definition of resistance and conductance for a linear resistor,
we may call R[i ] = ∂v R ∂i R {G[v R ] = ∂iR ∂v R } as the small-scale resistance
{conductance} of a nonlinear resistor which may be positive, zero, or negative
(Fig. 5.4c) with out making the resistor non-passive.. The one-to-many mapping
is not desirable in practical devices (and perhaps not possible to realize) since it
will only lead to confusion. The many to one mapping implies that the
characteristic is non-invertible or from a practical point of view, implies that the
R
use of the element should be restricted such that the independent variable and
dependent variable designation is preserved. Some circuit examples consisting
of nonlinear resistors along with other linear elements (yet to be defined) are
shown in fig. 5.5. and the kind of nonlinear resistors to be used for proper circuit
behavior are indicated.
The slope becoming zero (over a region of the independent variable) or
infinite may be mathematically possible but not possible in practice, at least in
analog systems. Hence we can omit these two possibilities and assume that the
waveform is continuous with finite first-order and second-order derivatives. The
slope becoming negative (leading to many to one mapping) implies that the
dependent variable decreases (increases) when the independent variable
increases (decreases) in value. Such a characteristic may lead to exotic circuit
behavior when used with similar complex elements in applications such as
neural nets. However, we may omit such characteristics in engineering design
applications such as control where we invariably go for "conservative design".
i R (t)= i R [ v R (t) ]
(5.8b)
with the corresponding discrete models as:
v R (nT)= v R [i R (nT) ]
(5.8c)
i R (nT)= iR [ v R (nT) ]
(5.8d)
and
where, for most practical purposes, we can restrict the nonlinear resistor
characteristics to be anti-metric with respect to the origin of the v-i plane (or
bilateral element), continuous and monotonously increasing. Further relaxation
can be made if and when necessary.
iL (t)
v s (t)
+
iR (t)
v R (t)
-
-
+
i s (t)
i c (t)
v c (t)
v s (t)
-
-
i R (t)
+
v R (t)
-
Voltage controlled
nonlinear resistor
Current controlled
nonlinear resistor
(a)
+
-
is (t)
v L (t)
+
+
-
+
5.3.2.1.1 Non-passive and negative (active) nonlinear resistors:
(b)
Figure 5-5. Interconnection of nonlinear resistors with other electrical elements;
a) A nonlinear resistor connected in series with an inductor or a current source
must be current controlled; b) Voltage controlled nonlinear resistor in parallel
with a capacitor or a voltage source.
In the case of linear resistors, we have only two choices: a positive resistor
(R and G > 0 ) or a negative resistor ( R and G < 0 ). In the case of nonlinear
resistors, we have a few more possibilities. In Fig. 5.6a. we show the
characteristic of a passive, nonlinear resistor. In fig. 5.6b we show a resistor for
which p(t) ≤ 0 for all values of the independent variable leading to a active or
negative nonlinear resistor, similar to the case of a negative linear resistor.
Figures 5.6c to 5.6e show the other cases where we have nonlinear resistor
characteristics with p(t) ≥ 0 (a passive or lossy nonlinear resistor) for certain
values of the independent variable and p(t) ≤ 0 (an active nonlinear resistor) for
other values of the independent variable. The behavior of circuits composed of
such elements and other elements will obviously be more complex as compared
to the response from circuits with linear elements only. Such elements can be
used to model systems which are not passive always, to explain concepts such as
chaos, and to design complex neural network architectures as we will see in later
chapters.
5.3.3 Multi-port Memoryless Devices
In summary, a current controlled nonlinear resistor will be represented as:
v R (t)= vR [ i R (t) ]
and a voltage controlled nonlinear resistor by:
(5.8a)
The condition that the power, p(t) = 0 for all time t can be satisfied in a nontrivial manner only in the case of multi-port devices. Let us first consider twoport devices with a block diagrammatic representation as shown in Fig. 5.7a. We
have 4 parameters for a two-port-device of which two can be the independent
variables and the other two the dependent variables leading to two equations.
For example, if v1 (t) and v 2 (t) are the independent variables, we can represent
the dependent variables i1 (t) and i 2 (t) as:
1
iR
iR
i 2 (t)
i 1 (t)
iR
v1 (t)
1'
+
A Two-port
Device
-
i 1 (t) 1 : N
2
+
-
2'
vR
vR
•
+
+
v 2 (t)
vR
i 2 (t)
v1 (t)
v 2 (t)
-
-
(a)
(a)
(b)
(c)
iR
Rs
iR
i 1 (t)
+
+
vR
vR
v s (t)
=
-
(d)
(e)
1: N
•
+
+
ˆ ⇒
R
L
v1 (t)
RL
N
i 2 (t)
+
v 2 (t) v R (t)
i R (t)
(b)
RL
2
-
-
-
(c)
Figure 5-6. Nonlinear resistors v-i characteristics; a) Fully
passive with monotone characteristic; b) Fully passive with nonmonotonic characteristic; c) Fully active or a negative; d) Nonpassive (active near the origin & passive when the magnitude of
the independent variable is large); e) Another non-passive
(passive near the origin & active when the magnitude of the
independent variable is large).
Figure 5-7. a) Block diagrammatic representation of a 2-port
device; b) Symbol for an ideal transformer; c) Resistance
scaling property of an ideal transformer.
i1 (t) = y 1[ v1 (t), v 2 (t)]
(5.9)
i 2 (t) = y 2 [ v1 (t), v 2 (t)]
In addition to the choice of the independent and dependent variables given
by this example, there exist five more choices (Table 5.1). The condition that
p(t) = 0 can be satisfied by constraining the functions f 1 [• ] and f 2 [• ] such that:
p(t) = v1 (t)i (t) + v2 (t)i (t)
=0
1
2
(5.10)
is satisfied. Let us consider useful devices arising from the six possibilities
subject to the above constraint.
Independent
variables
1)
2)
3)
4)
5)
6)
Dependent
Variables
Voltage controlled
v 2 (t), i1(t)
v 2 (t) = h11[v1(t), i2 (t) ]
Hybrid # 1
v 2 (t), i 2 (t)
v 2 (t) = t 11[ v1 (t), i1 (t) ]
i 2 (t) = t12 [ v1 (t), i1 (t) ]
i 1(t), i 2 (t)
v1(t), i 2(t)
v1(t), i1(t)
v1(t), i 2(t)
where N is a constant called the turn ratio. The effect of having a negative value
for N is equivalent to changing the polarity and direction for v 2 (t) and i1 (t) .
Hence, we can restrict N to be positive and represent the resulting voltage
polarity by a dot in the symbol for transformer as shown in Fig. 5.7b.
The power p(t) consumed by a transformer is exactly equal to zero. Thus, the
device neither dissipates nor generates energy and the power entering one port
gets delivered to the load at the other port. Thus a transformer is a memoryless
device and functions as power-transfer unit or a power broker. If we terminate
the second-port of a transformer by a resistive load R L as shown in fig. 5.7c, we
can show that:
Type
i 1(t) = y 1[ v1 (t), v 2 (t) ]
v1(t), v2 (t)
v 2 (t), i1(t)
I/O Relationship
i 2 (t) = y 2 [v1 (t), v2 (t) ]
i 1(t) = h12 [v1 (t), i2 (t) ]
v1 (t) = t 21[v2 (t), i1 (t)]
i 2 (t) = t 22 [v2 (t), i1 (t) ]
v 2 (t), i 2 (t)
v1(t), i1(t)
v1(t) = h 21[ v2 (t), i2 (t) ]
i 1(t), i 2 (t)
v1(t), v2 (t)
v1 (t) = z1[i1(t), i 2 (t)]
Transmission # 1
v1 (t) =
RL
i (t)
N2 1
(5.13)
Hybrid # 2
That is, the load seen by the source v s (t) connected to the first port is given by
z in = R L N2 and can be varied by varying N without changing the power
supplied to the actual load R L .
The equations given so far are for an ideal memoryless transformer1 and in
practice we can expect some loss in the device. However, we can use the ideal
transformer as one basic building-block and represent the loss by a two-port
network formed by other building blocks such as resistors. This statement
applies equally to other lossless, multi-port devices discussed.
Transmission # 2
i 1(t) = h22 [ v2 (t), i 2 (t)]
Current Controlled
v 2 (t) = z 2[i1(t), i2 (t) ]
5.3.3.2 Time-Varying/Nonlinear Transformer
Table 5-1. Six representations for a two-port network.
By allowing the turns-ratio N in the equations to vary as a function of time t, we
arrive at a time-varying transformer that is still lossless with the I/O relationship
as:
5.3.3.1 Transformer with constant turns ratio
An ideal transformer is one two-terminal element characterized by the following
two equations:
v 2 (t) = N v1 (t)
i1 (t) = −N i2 (t)
(5.11)
or in a matrix form:
v2 (t) N 0 v1 (t)
i (t) = 0 −N i (t)
1
2
(5.12)
0 v1 (t)
v2 (t) N(t)
i (t) = 0
i (t)
−N(t)
1
2
(5.14)
The reader may wonder how the device may be constructed, and what kind
of characteristics to choose for N(t). Some analog realizations have been
proposed where the main objective is to control the amount of power delivered
to the load. We can also construct such a device in the digital domain where we
simply implement the relationship:
0 v1 (nT)
v2 (nT) N(nT)
i (nT) = 0
−N(nT) i2 (nT)
1
1 Later, we will see the definition of an ideal transformer with memory.
(5.15a)
using software or hard-wired digital logic. A pseudo-code for implementing the
I/O relationship of a circuit corresponding to a transformer loaded by a linear
resistor at the second-port is:
1
i 1 (t)
+
Given v1 (nT), N(nT)
v 2 (nT) = N(nT)v 1 (nT) ;
Transformer first equation
i2 (nT) = −G L v 2 (nT) ; Due to load
i1 (nT) = −N(nT)i 2 (nT) ; Transformer second equation
Return i1(nT)
(5.15b)
In both analog and digital realizations, instead of simply making N(t) an
independent function of t, we can (and mostly we will) make N(t) a function of
the state-variables of the network in which it is embedded. For example, suppose
there exists an error function e(t) that is a well defined, continuous function of
the state-variables and expected to go to zero. We can connect the time-varying
transformer (with the choice of N(t) = e(t) and terminated at its second port with
a fixed load R L ) to the rest of the circuit as shown in Fig. 5.8. The load seen at
the terminals 1-1' can be shown to be varying inversely to the square of the error
e(t). Thus a load is present at the terminals 1-1' as long as e(t) ≠ 0 and gets
removed as and when e(t) becomes zero. Thus, we are able to include a damper
in the circuit whose effect varies as a function of suitably chosen error function.
We will see the use of such configurations in adaptive systems in the later
chapters.
A number of points are worth noting here. As suggested above, in most
applications, the turns ratio will be made a function of the state variables and not
an independent time-varying function. Hence we can call such a device Nonlinear transformer. Secondly, though an analog realization is possible, the
device is highly suited for use in digital realization of complex nonlinear
systems where we can preserve the lossless property even under finite precision
representation for N [• ] and other variables. Further, in practice, N [• ] will be a
function of e(t − τ) ( τ > 0) so that a physical realization is possible.. Thus, it
may be argued that it is a device with memory. However, from a functional view
point, a nonlinear transformer is a memoryless device and we will continue to
use this interpretation.
An Electrical
Circuit
ˆ (t) ⇒
R
L
v1 (t)
RL
= 2
N (t)
-
1 : N(t)
i 2 (t)
•
+
+
v 2 (t)
v R (t)
-
-
i R (t)
RL
1'
Nonlinear and or
time-varying
transformer
Figure 5-8. Use of a nonlinear/time-varying transformer to implement a timevarying load.
5.3.3.3 Two port, linear Gyrators:
Another useful device called a two-port gyrator (Fig. 5.9a) results by letting
v1 (t), v2 (t) as the independent variables and i1 (t), i 2 (t) as the dependent
variables with the following relationship:
i1 (t) 0 G v1 (t)
i (t) = −G 0 v (t)
2
2
(5.16)
where G, a constant, is called the gyrator conductance. It can be noted that
p(t) = v1 (t)i 1 (t) + v 2 (t)i 2 (t) = 0 regardless of the value of G. In the case of the
two-port gyrator, the I/O relationship can also be written in the form:
v1 (t) 0
v (t) = −R
2
R i1 (t)
0 i2 (t)
(5.17)
where R = G −1 . That is, i1 (t), i 2 (t) can be considered as the independent or
source variables and v1 (t), v2 (t) the dependent or response variables.
When a gyrator is terminated at the second-port with a linear resistor of R L
ohms (Fig. 5.9b), it can be shown that the load seen at the first-port is:
R in (t)=
v1 (t)
1
= 2
v1 (t) G R L
i1 (t)
i (t)
2 =
M
i (t)
M
(5.18)
That is, a gyrator 'inverts' the behavior of the load. This inversion property
allows the realization (or simulation of the property) of an inductor using a
capacitor2 and hence eliminates the need for the use of an inductor as a basic
building block of electronic circuits. Also, when terminated with a current
(voltage) controlled nonlinear resistor at the end of the second port, the
inversion property leads to voltage (current) controlled nonlinear resistor at the
first port. Thus, we can form one type of nonlinear resistor from the other type
of nonlinear resistor, a useful property when only one such nonlinear resistor
can be implemented.
0
−y
12
M
−y
1M
y12
0
M
− y2M
K y1M v1 (t)
K y 2M v 2 (t)
O
M M
K 0 v M (t)
or
i = Yv
(5.19b)
where yij are real constants and Y is the admittance matrix3. Note that the
property:
Y + Yt = 0
1:G
i 1 (t)
1:G
i 1 (t)
i 2 (t)
•
•
+
+
vv1 (t)
(t)
1`
v 2 (t)
-
-
i 2 (t)
+
+
Rˆ L ⇒
= G 2R −1
L
v1v(t)
1` (t)
-
(a)
+
v 2 (t)
v R (t)
-
-
i R (t)
(5.19a)
(5.20)
still holds as well the lossless property. Thus, the multi-port gyrator also serves
the function of transferring power from certain ports to other ports
instantaneously with no loss.
The current controlled representation of a multi-port gyrator is:
v1(t) 0
v (t) −z
2 = 12
M M
v (t) −z
M
1M
RL
z 12
0
M
−z 2M
K z 1M i1(t)
K z 2M i 2 (t)
O
M M
K 0 iM (t)
(5.21a)
(b)
or
Figure 5-9. a) The symbol for a linear, two-port gyrator; b) The impedance
inversion property of a linear gyrator.
v = Zi
(5.21b)
Z + Zt = 0
(5.21c)
where
with Z the impedance matrix. It can be observed that the relationship:
5.3.3.4 Multi-port, linear Gyrators:
Multi-port gyrators result from a straight forward extension of the definition of
the two-port gyrator to a M-port device. For example, the I/O relationship of a
voltage controlled multi-port gyrator is given by:
2 Formal definitions for inductors and capacitors are given in section 5.3.4.
Y = Z− 1
(5.22)
holds when the inverse exists. We can show that the inverse doesn't exist
always. This simply implies that under such circumstances, the gyrator will be
3 Definitions such as admittance matrix are normally made in the frequency domain (splane). We use the definition/terminology in the time-domain itself as we are
dealing with nonlinear and time-varying elements.
either voltage controlled or current controlled and must be used as such. It can
also be noted that the admittance (and the impedance) matrix Y (Z) of a lossless
gyrator is positive-definite or semi-definite and anti-metric. As we will see later,
most mathematically oriented approaches to control or signal processing, omit
such matrices (and hence such devices) from any consideration. In fact, the
definition of positive definiteness and positive semi-positive definiteness
involves only symmetric matrices and ignores anti-metric matrices completely.
However, considered as a device, gyrators can play an important role in linear
and nonlinear systems.
+
R − R i1 (t)
0
R i2 (t)
−R 0 i3 (t)
(5.23)
Note that the determinant of the impedance matrix is zero. Let us demonstrate
the importance of such devices. Suppose we connect load resistors of value R
(same as the value of the impedance matrix element of the circulator) to ports
two and three and a non-ideal voltage source represented by an ideal voltage
source in series with a resistance R to port one as shown in Fig. 5.10. It can be
shown that:
R in
i 2 (t)
R
2
+
-
-
v 2 (t) 2'
RL = R
i 3 (t)
3'
-
+
3
RL = R
Figure 5-10. A three-port circulator connected to a source at one port and loads at
the other two ports. The source and the load resistances have the same value.
Note that the determinant of this matrix is zero which implies, for this
device, i 3 = i1 + i2 Thus, we should not connect inductors in series to all three
ports. Issues of interconnecting various devices and the effects are discussed in
chapter 6.
5.3.3.5 Nonlinear Gyrators:
By making the admittance matrix elements (or impedance matrix elements)
functions of the state-variables, we obtain a nonlinear, lossless gyrator with a v-i
relationship:
i1 (t)
i (t)
2 =
M
i (t)
M
(5.24)
and that the power entering Port one is transferred completely to port two with
no power going to port-three. A similar phenomena occurs if the non-ideal
source is connected to port-2 (or port-3) and the loads to the port-3 (port-1) and
1 (and port-2) whereby port-3 (port-1) receives all the power and the port-1
(port-2) none, leading to the name circulator. Such devices find useful
applications in communications and measurements.
v1 (t)
R in = R
i1 (t) = i2 (t)
i 3 (t) = 0
v (t)
= 1
=R
at port # 1
i1 (t)
1'
-
A special device called a three-port circulator can be obtained from the multiport gyrator definition by letting M = 3 and constraining the impedance matrix
elements to some specific values as shown below:
0
−R
R
i 1 (t)
+
v s (t)
5.3.3.4.1 Circulator: A special three-port gyrator:
v1 (t)
v (t) =
2
v3 (t)
1
Rs = R
or
with
0r
y12 [.]
0
−y [.]
0
12
M
M
−y [.] −y [.]
1M
2M
i = Y[.]v
Y[.]+ Y t [.] = 0
K y 1M [.] v1 (t)
K y 2M [.] v 2 (t)
O
M M
K
0 v M (t)
(5.25a)
z12 [.]
v1(t) 0
v (t) −z [.]
0
2 = 12
M
M M
v (t) −z [.] −z [.]
M 1M
2M
K z 1M [.] i1 (t)
K z 2M [.] i 2 (t)
O
M M
K
0 i M (t)
v = Z[.]i
or
pc (t) = v c (t)i c (t)
t
Negative
power
flow
(5.25b)
Positive
power
flow
Z[.] + Z t [.] = 0
with
where
Z − 1[.] = Y[.]
(5.25c)
when the inverse exists. However, in the case of nonlinear gyrators, it is better to
specify which are the input variables and which are the output variables and
stick to that convention. It can be noted that though a nonlinear gyrator is
obtained by a straight forward extension of the definition of a linear gyrator, this
new device can play an important role in nonlinear system modeling and design
as we will see later in this chapter and other chapters. It should be noted that the
basic properties such as losslessness and positive definiteness or semidefiniteness are still valid and can be preserved in a digital implementation.
5.3.4 One Port elements with memory
Figure 5-11. Power flow into a two-port lossless device. The power flowing into
the device is stored as energy and returned back completely at a later time. It is a
passive device as it returns only the energy given to it before and nothing more, it
is lossless as it consumes no energy, and is a device with memory in the sense that
the energy returned is limited to what was stored before.
Such a behavior implies that the element is capable of storing energy and is
lossless. The energy storage property can also be considered as leading to
"memory" in the element since the net energy returned by the device depends on
the energy previously delivered to the element.
The property that the element has memory rules out the possibility of a
instantaneous relationship of the form:
The fourth possibility:
or
or
∞
E(∞) =
∫ p(t)dt
f[v(t),i(t)] = 0
v(t) = f 1 [i(t)]
i(t) = f 2 [v(t)]
−∞
∞
=
∫ v(t)i(t)dt
(5.26)
−∞
=0
is possible in a nontrivial two terminal (one - port) element only if:
1) a)the power delivered to the device can be both positive and
negative, and
2) the energy received by the device (the area enclosed by the
waveform p(t) ≥ 0 and the t-axis) is returned (the area
enclosed by the waveform p(t) ≤ 0 and the t-axis) completely
(see Fig. 5.11).
between the voltage and the current of the two-terminal element. Rather, the
relationship has to include dynamic operators such as integrators. Two such
basic one-port devices are possible as explained below.
5.3.4.1 Capacitors:
5.3.4.1.1 Linear, Time-Invariant Capacitors
A physical device can be formed with two flat parallel metal plates separated by
a distance d and the space between the plate filled with ferro-electric materials
such as barium titanate or left free. If the distance between the plates d is kept
constant, and a voltage v c (t) is applied to the two plates, a charge q c (t) will be
induced on the upper plate and a charge of value - q c (t) on the lower plate. The
magnitude of the charge will depend on:
1) the distance d,
2) the plate area A,
3) the dielectric constant of the material between the plates and
4) the magnitude of the voltage applied.
If the first three are held constant, then the charge will be directly proportional
to the voltage leading to a linear time-invariant capacitor (LTI) with a symbol
as shown in Fig. 5.12a. We can denote the relationship between the charge and
the voltage of LTI capacitor as:
q c (t) = cv c (t)
(5.27)
where c (c > 0 ) is a constant known as the capacitance. The current through a
LTI capacitor is given by:
constant voltage source of v c (t 0 ) volts and a capacitor with the same
capacitance value and no past history as shown in Fig. 5.12b. This equivalence
can help in determining the minimal but sufficient number of elements to build
complex circuits. Also this observation will become useful as we move onto the
analysis of complex circuits with elements with past history.
Finally, the net energy entering the LTI capacitor during any time interval
(t 1 , t2 ) is given by:
t2
E c [t 1 ,t 2 ] =
∫ p (τ)dτ
2
t2
t2
τ= t 1
τ=t 1
c
t ≥ t1
τ= t 1
=
∫ vc (τ)i c (τ)dτ =
=c
vc (t 2 )
∫v
c
∫ v (τ)c v˙ (τ)dτ
c
c
(5.30)
(τ)dv c = 12 c{v 2c (t 2 ) − v 2c (t 1 )}
v c (t 1)
dq c (t)
dt
dvc (t)
=c
dt
= c˙vc
i c (t) =
(5.28)
We can write v c (t) , the voltage, as a function of i c (t) as:
E c [t 1 ,t 1 + kT p ] = 0 k an integer
t
v c (t) =
1
∫ i c (τ)dτ
c τ=−∞
(5.31)
for t> -∞
t0
1
1 t
=
i c (τ)dτ + ∫ ic (τ)dτ for t ≥ t0
∫
c τ=−∞
c τ= t
(5.29)
0
t
= v c (t 0 ) +
That is, the net energy E c [t 1 ,t 2 ] entering a LTI capacitor for any interval
(t 1 , t2 ) depends only on the value of the voltage (or charge) at the two end
points t 1, t 2 and is independent of the voltage or charge waveform that existed
in that time interval. Further, if v c (t) is periodic (perhaps a very complex)
signal with a period T p , we can show that:
1
i c (τ)dτ
c τ=t∫
0
That is, the capacitor voltage v c (t) at any instant t depends not just on the value
of current at that time instant but also on the past values of the current going
back to t = −∞ (entire past history), confirming the memory property of the LTI
capacitor. Equation (5.29) also indicates that in practice we do not have to
specify the entire past history. We can choose a convenient initial time t 0 and a
single value, the voltage v c (t 0 ) across the capacitor at that time, to denote the
effect of the current i c (τ) for −∞≤ τ ≤ t 0 on v c (t) ( t > t 0 )
Equation (5.29) also implies that a capacitor with past history represented by
the voltage v c (t 0 ) can be considered as equivalent to a series connection of a
That is, the energy entering a LTI capacitor in a complete cycle of a periodic
excitation is exactly equal to zero. This implies that the power entering a LTI
capacitor during certain parts of a cycle must be negative to result in a zero net
energy consumption in a full period. Thus, the energy is stored during that part
of the cycle and released during the other part of the cycle. From (5.30), it can
be seen that maximum energy release takes place when v c (t 2 ) = 0 and is given
by (letting v c (t 1 ) = v c ):
E c [v c ] = 12 cv2c =
1
2c
q 2c
(5.32)
Therefore the energy stored in a LTI capacitor is proportional to the square of
the voltage across (or charge on) the capacitor. When q c = 0, E c = 0 implying
that the capacitor has no energy to release. Thus, we can say that the capacitor is
in a relaxed state and q c = 0 can be called the relaxation point for the capacitor.
charge = q c (t)
+
pout (t) = −v1 (t)i 1 (t)
i c (t) = q˙ c (t)
+
+
+
v c (t)
v c (t)
c
c
v c (0) ≠ 0
-
≡
-
-
+
vˆ c (t)
vˆ c (0) =0
v1 (t)
+
= v c (t)
-
c
and the energy that can be delivered from time t 1 to t 2 by this circuit as:
t2
v c (0)
-
E out [t 1 ,t 2 ] =
∫p
out
(τ)dτ
=−
(b)
∫ {v
τ=t 1
+
i 1 (t)
+
i c (t)
v c (t)
v1 (t)
-
c
n
-
= −c
(c)
Figure 5-12. a) Symbol of a Linear time-invariant capacitor. b) A LTI capacitor with
initial charge and its equivalent representation in terms of a capacitor with no charge
and a constant voltage source. c) Interconnection of a capacitor with independent or
dependent voltage sources and certain current sources that lead to a passive circuit.
5.3.4.1.1.1 Interconnection of LTI Capacitors and Independent & or
Controlled Sources
We noted that a charged capacitor, a passive device, is equivalent to a series
connection of a capacitor with no charge and an ideal constant voltage source,
an active device. This is perhaps little bit surprising as we know that an ideal
voltage source is capable of supplying unlimited amount of energy whereas an
initially charged capacitor has only finite amount of energy to give out. We can
show that there is no discrepency by calculating the energy that can come out of
this series connection. In fact, this calculation will help us to arrive at more
complex interconnections involving a capacitor and ideal and controlled sources
that have similar properties.
The power coming out of the circuit of Fig. 5-12b is given by:
(τ) − vDC }c v˙ c (τ)dτ
(5.34)
∫ {v
c
(τ) − v DC } dv c
vc ( t1 )
[
= − 12 c {vc (t 2 ) − v DC } − {vc (t 1 ) − v DC }
k x (t)
+
c
v c (t 2 )
cknx n −1 (t) x˙ (t)
-
t ≥ t1
2
τ= t 1
t2
(a)
(5.33)
= −{v c (t) − v DC }cv˙ c (t)
2
2
]
That is, the energy that can be delivered by this circuit (which has an ideal
source) is restricted by the voltage that exists across the capacitor at the two end
points and not the voltage (at other times) or the current values. Using similar
arguments that we made for a charged capacitor, we can see that the maximum
net energy release takes place from this circuit when v c (t 2 ) = v DC and just
depends on the initial voltage on the capacitor and the ideal voltage source
amplitude. That is:
[
E out_max (v c ) = 12 c {v c (t) − v DC }
2
]
(5.35)
where we have dropped the subscript '1' associated with the initial time. This
expression is identical to the one for the stored energy of a capacitor except for
the shift by the constant factor v DC . Therefore, the maximum energy that can be
released is still limited by the initial charge in the capacitor even though we have
an ideal voltage source. In other words, the capacitor still calls the dance, so to
speak.
We can extend further this concept of a circuit with only a limited stored
energy to give out to include controlled sources as well as time varying sources.
Referring to equation (5.34), we find that a circuit as shown in Fig. 5.12c will do
the trick. In the circuit, x(t) can be a state variable of a complex circuit (to which
this sub-circuit has been connected) or an independent source and k is a
constant. The corresponding energy expressions are:
dq c (t)
dt
= q˙ c (t)
t2
E out [t 1 ,t 2 ] =
∫p
out
(τ)dτ
i c (t) =
t ≥ t1
2
τ= t 1
t2
=−
∫ {v
τ=t 1
c
}{
}
(τ) − k xn (τ) c v˙ c (τ) − ck n x n−1 (τ) x˙ (τ) dτ
[{
= − 12 c vc (t 2 ) − k x n (t 2 )
} − {v (t
2
c
1
(5.36)
}]
) − k x n (t 1 )
2
(5.41)
If the nonlinear q-v characteristics is continuous (differentiable), a
reasonable condition for physical devices, the above equation becomes, for
voltage controlled capacitors:
dq c (t)
dt
dq (t) dvc (t)
= c
dv c (t) dt
= c[v c ] v˙ c
i c (t) =
and
[{
}]
E out_max = 12 c v c (t) − k x n (t)
2
(5.37)
Again, the energy that can be released is limited and depends on the initial
condition only.
In summary, we find that the circuit combinations shown in Figs. 5.12b and
5.12c can be considered as passive building blocks (that are capable of getting
charged or capable of releasing only a limited amount of energy) even though
they have active sources as sub-components. We can use such passive building
blocks to form complex stable nonlinear dynamics as well as control complex
nonlinear plants (stable or unstable) as we will learn later.
5.3.4.1.2 Non-linear, Time invariant Capacitors:
When the dielectric constant of the material between the plates change with the
applied voltage (or electrical field), a nonlinear, time invariant (NLTI) capacitor
results. The q-v characteristics of a general NLTI capacitor will take the form:
f c [q c ,v c ] = 0
(5.38)
As in the case of nonlinear, time invariant resistors, we can obtain a charge
controlled (voltage controlled) capacitor if the above equation can be solved to
obtain a single valued function of charge (voltage) for the voltage (charge). That
is,
v c (t) = v c [q c (t)]
where c[v c ] can be called the small-scale capacitance of a NLTI capacitor. For
charged controlled NLTI capacitors, we can obtain similar relationship by
considering the time-derivative of the voltage. That is,
dv c (t)
dt
dv c (t) dq c (t)
=
dq c (t) dt
v˙ c (t) =
(5.43)
= s[q c ] i c (t)
where the unit for s[q c ] will be the inverse of c[v c ] (if it exists) and hence can
be called the small scale inverse capacitance. It should be noted that for both
types of nonlinear capacitors:
t
q c (t) =
∫ i (τ)dτ
for t> -∞
t0
t
c
τ=−∞
=
∫ ic (τ)dτ +
τ=−∞
(5.39)
∫i
c
(τ)dτ for t ≥ t 0
(5.44)
τ= t 0
t
= q c (t 0 ) +
∫ i (τ)dτ
c
τ= t 0
for a charge controlled capacitor and
q c (t) = q c [v c (t)]
(5.42)
(5.40)
for voltage controlled capacitors. The current through the NLTI capacitors
similar to LTI capacitor, is given by
confirming that nonlinear time-invariant capacitors also exhibit memory.
5.3.4.1.2.1 Charge controlled or voltage controlled NLTI Capacitors ?
Given the choice, which version of the NLTI capacitor is preferable in practice?
We can obtain an answer to this question from a consideration of the types of
state equations that would result when such an element is used in a circuit and
their solvability. The application of Kirchhoff's current and voltage laws4 to the
circuit leads to the state equations that characterize the behavior of the circuit. In
practice KVL would lead to an equation of the form:
n
∑i
jk
(t) = 0
(5.45)
j=1
where i jk (t) are the currents flowing through the n elements which are
connected together at the k-th node. If we assume that one such element is a
capacitor (we can assume that j = 1 refers to that capacitor without any loss of
generality), then for a charge controlled capacitor we can obtain from (5.43) and
(5.45):
From the above discussion, we can conclude that charge controlled
capacitors can have characteristics that are not possible using voltage controlled
capacitors and hence their use in nonlinear networks will lead to highly complex
behavior than is possible with voltage controlled capacitors. We will therefore
assume the use of charge controlled capacitors when the use of a nonlinear
capacitor is indicated. The symbol for a nonlinear time-invariant capacitor is
shown in Fig. 5.13a. The symbol for the nonlinear capacitor indicates the
possibility that the v-q characteristics may not be bilateral as in the case of
nonlinear resistors.
The net energy entering a charge controlled capacitor during any time
interval [t 1,t 2 ] is
E c [t 1 ,t 2 ] =
t2
∫
pc (τ)dτ =
τ= t 1
n
i1k (t) = ick (t) = q˙ ck (t) = − ∑ i jk (t)
(5.46a)
j= 2
(5.46b)
On the other hand, for a voltage controlled capacitor we can write from
(5.42) and (5.45):
n
i ck (t) = c[v c ]v˙ c = − ∑ i jk (t)
(5.47a)
q ck (t) = qck [v ck (t)]
(5.47b)
j=2
and
Thus, in the case of a charge controlled capacitor we can choose q c as the state
variable and solve (5.46a) numerically to obtain q c (n + 1) and equation (5.46b)
for v c (n + 1). In this case the mapping v c [q c ] can be many to one
(s[q c ] = dvc dqc can become zero for some values of q c or its inverse can
become infinite).
For a voltage controlled capacitor, we need to choose v c as the state
variable. This in turn will require that the inverse of c[v c ] exists or
c[v c ] = dq c dvc does not become zero for finite values of v c . Hence the
mapping q c [v c ] has to be restricted to a one to one (monotonically increasing or
decreasing).
4to be defined formally in chapter 6.
∫ v (τ)i
c
c
t 2 ≥ t1
(τ)dτ
τ=t 1
t2
q c2 = qc (t 2 )
τ= t 1
c
qc1 = qc (t 1)
= ∫ vc [q c (τ)] q˙ c (τ)dτ =
and
v ck (t) = vck [q ck (t)]
t2
∫ v [q
(5.48)
c
]dq c
A graphical interpretation of the above equation is shown in Fig. 5.13b. It
can be noted that E c [t 1 ,t 2 ] represents the net shaded area that depends on the
values of q c (t 1 ) and q c (t 2 ) and the capacitor voltage V s charge characteristics,
and not on the exact waveform of the charge q c (t) ( t 1 ≤ t ≤ t 2 ). That is, any
waveform q c (t) would have resulted in the same value of E c [t 1 ,t 2 ] as long as
q c (t 1 ) and q c (t 2 ) are the same. When q c (t 1 ) equals q c (t 2 ) , E c [t 1 ,t 2 ]
becomes equal to zero. Thus similar to a LTI capacitor, a NLTI capacitor is also
capable of storing and releasing energy.
From the above discussion, we can conclude that a NLTI capacitor is
lossless for any v c − q c characteristics. However, its choice will determine how
much energy is stored or released as q c (t) changes from q c 1 to q c2 and the
dynamic behavior of the network in which the NLTI capacitor is embedded. Let
us study the expression for the energy further to determine the possible
waveforms for v c [q c ] . Let us first rewrite expression (5.48) as:
E c [t 1 ,t 2 ] =
E c [t 1 ,t 2 ] =
q cr
q c2
q c1
q cr
q cr
q c2
∫ v c [q c ]dq c + ∫ v c [q c ]dq c
(5.49)
∫ v [q
(5.49)
c
q c1
c
]dq c + ∫ v c [q c ]dq c
qcr
Where we assume that there exists a value q c = qc r on the v c − q c
characteristics such that:
Given such a value q c r , the net energy expression (5.44) can be written as
charge = q c (t)
v c [qc ]
i c (t) = q˙ c (t)
+
vc (t) = v c [q c (t)]
E c [t 1 ,t 2 ] = −E cr + E cs
qc
or
q c (t) = q c [v c (t)]
-
q cr
Net area between
q c to q cr and the waveform
for any value of
q c ≤ qcr must be negative
(a)
Net area
between q to q
c
and the cr
waveform
for any value of
q c ≥ qcr must be positive
(b)
q c2
c
[q c ]dq c ≥ 0 for all real q c2
(5.50)
qcr
and hence,
q cr
∫ v [q
c
c
]dq c ≤ 0 for all real q c1
(5.51)
q c1
The above condition implies the following:
1) v c [q cr ] = 0 ;
2)
dv c [q c ]
dq c q
>0
c
where, E cr > 0 stands for the energy released by the capacitor and E cs > 0 for the
energy delivered to the capacitor during the time t 1, and t 2 . Thus if
q c (t 2 ) = q c2 = qcr , a NLTI capacitor with an initial charge of q c (t 1 ) = q c1 = q
releases an energy equal to:
q
E c [q] = ∫ v c [q c ]dq c
(5.53)
qcr
Figure 5-13. a) The symbol of a nonlinear time-invariant capacitor. b) Requirements
on a waveform to be the valid v c − q c characteristic of a nonlinear capacitor.
∫v
(5.52)
=q cr
3) The net area covered by the waveform v c [q c ] and the q c axis
must be non-positive for values of q c in the range
−∞≤ q c ≤ q cr and,
4) The net area under the waveform v c [q c ] and the q c must be
non-negative for all values of q c in the range q cr ≤ qc ≤ ∞.
and represent the energy stored in an initially charged capacitor. If q is equal to
q cr , the energy that can be released or supplied by the capacitor is equal to zero
and hence the capacitor can be considered to be in a relaxed state. Therefore,
any point q cr with the property in (5.50) can be called a relaxation point for the
NLTI capacitor. A number of v c [q c ] waveforms having at least one relaxation
point q cr are shown in the Fig. 5.14. It should be clear from the figure that a
number of possibilities for the v c [q c ] waveform exist and lead to different
energy storage properties. If the v c [q c ] waveform is bilateral (anti-metric with
respect to the y axis), the energy curve is symmetric with respect to the y axis. If
the v c [q c ] waveform is confined to first- and the third-quadrants, the energy
curve is monotonically increasing with only one minima (global minima). If the
waveform strays into second- or fourth-quadrants, the energy curve will have
more than one minima (local minimas and maximas in addition to the global
ones). Based on these stored energy curves, we can easily figure out the
response when such a capacitor is connected to other passive elements as we
will find later.
5.3.4.1.2.2 Importance of the existence of one or multiple relaxation points:
Though the energy expression for losslessness alone does not indicate that there
should be a relaxation point (An arbitrarily chosen v c [q c ] waveform for a
lossless NLTI capacitor with no relaxation point is shown in Fig. 5.15), the
constraint that the element be passive dictate that the v c [q c ] characteristics
include that at least one relaxation point.
Multiple true relaxation points (where the stored energy is exactly equal to
zero) are possible only from trivial mathematical models5 such as
v c [q c ] = sin[q c ] {in general , v c [q c ] = ∑ A n sin[k n q c +θ n ] where kn and θ n
n
5 The waveform is identical (due to periodicity) and the relaxation points are equally
spaced.
are constants}. On the other hand, we can have non-trivial v c [q c ] characteristics
with just one relaxation point and a number of mimimas for stored energy. This
happens when the v c [q c ] moves into second- and or fourth-quadrants.
v c[q c] = tanh[q c]
response {for example, behavior that depends on initial condition etc.}. In
conservative design, we may assume that the v c [q c ] characteristic will have
only one relaxation point q cr . Further, without any loss of generality, we can
assume the waveform to be such that q cr is equal to zero.
v c [qc ]
1
f c [q c ] = q c +q 2c
0.5
qc
qc
0
4
q cR ≠ 0
q cR = 0
-0.5
qc
0
-1
-4
-2
0
2
4
-2
0
(a)
(b)
(a)
300
v c [q c] = cos[q c ]
v c [q c] = sin[q c ]
1
2
v c [q], SSIC[q], E c [q]
1
200
0.5
E c [q]
0.5
qc
qc
0
0
-0.5
-0.5
-1
-8
-4
0
4
q cR = 0, 2π, 4 π etc.
8
-1
0
-8
-4
0
4
8
-200
v c [q] = q(q 2 − 9)(q 2 − 16)
q cR = π, 3π, 5π etc.
-5
(c)
(d)
Figure 5-14. Valid voltage-charge waveforms of nonlinear capacitors: a)
Monotonically increasing waveform (only one relaxation point, q cr = 0 ); b) Nonmonotonic (only one q cr ≠ 0 ); c) Non-monotonic, with multiple relaxation points
( q cr = 0, ± 2π, ± 4π.... ); d) Another non-monotonic characteristic, with multiple
relaxation points ( q cr = ±π , ± 3π.... ).
An example of such a waveform along with the resulting stored energy curve is
shown in Fig. 5.15b. When storage elements with such characteristics are
combined with other elements we can get nonlinear dynamics with exotic
-2
SSIC[q]
0
2
5
(b)
Figure 5-15. a) A waveform that fails to meet the conditions for the characteristic of
a nonlinear capacitor; b) A valid waveform with two energy minima.
In summary a charge controlled NLTI capacitor will be characterized by a
v c [q c ] waveform that
1) passes through the origin,
2) may or may not be symmetric with respect to the origin.
(bilateral and non-bilateral elements),
3) is differentiable at least twice for all values of q c so that the
reciprocal small signal capacitance is finite and continuous),
4) has none or many local minimas and maximas, and
5) becomes zero at a finite number of non-zero values of q c .
Thus, even with the restrictions of only one relaxation point, we have
tremendous flexibility in the choice of v c − q c characteristics.
5.3.4.1.2.3 Interconnection of Nonlinear capacitors with Independent & or
Controlled Sources
i 1 (t) = i c (t) = q˙ c (t)
pout (t) = −v1 (t)i 1 (t)
+
= −{v c (t) − v DC }q˙ c (t)
v c (t)
v1 (t)
-
-
+
(5.54)
and the energy that can be delivered by
this circuit from time t 1 to t 2 as:
v DC
E out [t 1 ,t 2 ] =
t2
∫p
out
(τ)dτ
t ≥ t1
2
τ= t 1
Figure 5-16. Nonlinear capacitor with a
constant voltage source. The combined
circuit behaves as a lossless circuit.
=−
t2
∫ {v
τ=t 1
c
(τ) − vDC }q˙ c (τ)dτ
(5.55)
(5.56b)
is a shifted version of the original voltage-current characteristic. Therefore, the
combined circuit's behavior is identical to a nonlinear capacitor.
Considering a voltage controlled nonlinear capacitor, the expression for net
energy coming out of the circuit becomes:
t2
We noted that LTI capacitors when connected with independent and or
controlled sources in a special way lead to two-terminal circuits that behaves
like a lossless circuit. Therefore, we may rightly ask if such a property extends
to nonlinear capacitors as well. As we will find now, it does in a limited way.
Considering figure 5.16, where we show the series interconnection of a
nonlinear capacitor with a constant voltage source, we can write the power
coming out of this circuit as:
+
vˆ c (q c ) = vc (q c ) − v DC
E out [t 1 ,t 2 ] = −
∫ {v
c
(τ) − vDC }
τ=t 1
dq
dv
dv c c
(5.57)
which is also dependent only on the end values of the voltage. Thus, this
combination also behaves as a lossless circuit.
Upon some reflection, we will find that we need to allow cancellation of
terms (capacitor current canceled by controlled current source) to form lossless
two terminal circuits using nonlinear capacitors and time-varying sources as we
did using LTI capacitors. We show the circuit along with others in Table 5.2.
Again such circuits (or such techniques) will help us in building complex stable
nonlinear dynamics as well as in controlling complex nonlinear plants (stable or
unstable) as we will see later.
5.3.4.2 Inductors:
An inductor is another device that can be formed by winding conducting wires
around a toroid made of non metallic materials such as wood or other nonlinear
ferromagnetic materials such as supermalloy. In such a device, the application of
a current i(t) will lead to flux φ(t) whose value will depend upon the
dimensions of the toroid, the properties of the materials used for the toroid, and
the current. The behavior of an inductor is similar to that of a capacitor in the
sense that its properties can be derived by replacing voltage, current and charge
and capacitance in the capacitor expressions by current, voltage, flux and
inductance respectively. Hence, each element can be considered as the “dual ”
of the other element.
5.3.4.2.1 linear time invariant inductor
For a charge controlled nonlinear capacitor, the energy expression reduces to:
φ L (t) = Li L (t)
qc ( t 2)
E out [t 1 ,t 2 ] = −
∫ vˆ (q
c
qc (t 1)
where
Applying the above mentioned duality concepts to the expressions for a linear
time invariant capacitor, we can obtain for a linear time invariant inductor as:
c
)dq c
(5.58)
(5.56a)
where, L is a positive constant known as the inductance. The voltage across the
terminals of a LTI inductor is given by:
Circuit
Circuit
Energy Equations
+
v c (t)
v1 (t)
-
E out[t1 ,t 2 ]
c
-
+
L
i 1 (t)
v c (t)
v1 (t)
-
c
-
E out[t 1 ,t 2 ] =− c
cknx n −1 (t) x˙ (t)
∫ z dz
-
z(t 1 )
where z(t) = vc (t) − k xn (t)
+
Flux controlled inductor
i 1 (t)
+
E out[t 1 , t 2 ] = −
v c (t)
v1 (t)
-
∫ {v (τ) − v }dq
v c [ q c (t 1 ) ]
c
DC
v c (t 2 )
v DC
E out[t 1 , t 2 ] = −
+
i DC
DC
dvc
c
+
+
-
-
k x (t)
+
+
i s (t) =
k x n (t)
v1 (t) -
+ i c (t) i s (t) = i c (t)
dv [q(t) ]
v c (t)
+ c
v1 (t)
dt
-
d{kx n (t) }
z(t 2 )
E out[t 1 ,t 2 ] =−
∫ z dz
-
z(t 1 )
+
E out[t 1 ,t 2 ] =−
v s (t) =
z(t 2 )
∫ z dz
where z(t) = i L [φ(t) ] − k x n (t)
cknx n −1 (t) x˙ (t)
n
Table 5-2. Two terminal (one-port) circuits made of reactive elements and active sources
that behave as lossless circuits.
(τ) − i DC }
z(t 1 )
where z(t) = vc [ q(t) ] − k x (t)
dt
i L [φ L (t 1 ) ]
L
i L (t)
L
i 1 (t)
∫ {i
i 1 (t)
v L (t)
i s (t)
(τ) − i DC}dφ L
i L [ φ L (t 2 ) ]
E out [t 1 , t 2 ] = −
dq
c
∫ {i
L
i L [φ L (t 1 ) ]
Current controlled inductor
-
c
∫ {v (τ) − v } dv
v c (t 1 )
-
E out[t 1 , t 2 ] = −
Voltage controlled capacitor
-
n
i L [ φ L (t 2 ) ]
i L (t)
v1 (t) =
v L (t)
Charge controlled capacitor
v c [ q c (t 2 )]
i 1 (t) = i c (t)
∫ z dz
cknx n −1 (t) x˙ (t)
+
+
+
z(t 2 )
E out [t 1 ,t 2 ] =− L
where z(t) = i L (t) − k x n (t)
v s (t) =
z(t 2 )
k x (t)
-
i s (t) =
k x n (t)
z(t 1 )
-
i c (t)
+
(τ) − i DC} di L
v1 (t) -
+
-
L
i L (t)
+
+
n
∫ {i
i 1 (t)
v L (t)
+
= −L
-
∫ {v c(τ) − vDC }dv c
v c (t 1 )
v DC
iL (t 2 )
i DC
i L (t 1 )
v c (t 2 )
= −c
E out[t 1 , t 2 ]
i L (t)
+
v1 (t) =
v L (t)
i 1 (t) = i c (t)
+
Energy Equations
i 1 (t)
Table 5-2 (Contd.)
dφL
di L
di L
dφ L (t)
dt
= φ˙
circuit or building block that behaves as a lossless building block. It is very easy
to arrive at the circuit and the equations using the duality principle and hence
will not be repeated here. We just show the circuits in table 5.2.
v L (t) =
L
(5.59)
di L (t)
dt
˙
= Li L
=L
5.3.4.2.2 Nonlinear, Time-invariant Inductors:
Similar to a charge controlled NLTI capacitor, a flux controlled inductor will be
preferred to a current controlled inductor and will be characterized by:
Or we can write i L (t) as a function of v L (t) and φ L (t) as:
t
i L (t) =
1
L
∫v
L
(τ)dτ
for t> -∞
τ=−∞
t0
=
1
L
∫ v L (τ)dτ +
τ=−∞
t
1
L
∫v
L
(τ)dτ for t ≥ t0
(5.60)
τ= t 0
t
= i L (t 0 ) +
1
L
∫v
L
Thus, all the concepts such as memory, representation of the entire past history
by current i L (t 0 ) etc. do apply here as well. Also the net energy entering the
LTI inductor can be shown to be
t2
∫p
L
(5.62)
(τ)dτ
τ= t 0
E L [t 1 ,t 2 ] =
iL (t) =i L [φ L (t)]
dφ (t)
v L (t) = L
dt
di
˙i (t) = L (t)
L
dt
di L (t) dφ L (t)
=
dφL
dt
= τ[φ L ]v L (t)
(τ)dτ
t ≥ t1
2
τ= t 1
where τ[φ L ] is called the small-scale inverse inductance. The use of a flux
controlled inductor will result in φ L being the state variable and will allow
τ[φ L ] to become zero ( i L [φ L ] non-monotonic). Further, we can show that a
NLTI inductor is a lossless element capable of storing energy and releasing it,
and can have i L −φ L characteristic that can have none, one or many relaxation
points. The symbol for linear and nonlinear inductors are shown in Fig. 5.17.
The various equations and the properties for linear and nonlinear resistors,
capacitors, inductors, transformers and gyrators are summarized in table 5.3.
t2
=
∫v
L
(τ)i L (τ)dτ
τ= t 1
flux =φ L (t)
t2
= ∫ iL (τ)L ˙i L (τ)dτ
(5.61)
+
τ= t 1
=L
i L ( t 2)
∫ i L diL
i L (t 1)
= 12 L{i2L (t 2 ) − i2L (t 1 )}
v L (t) =
φ˙ (t)
iL (t)
flux =φ L (t)
i L = i L [φL ]
φ L =φ L [i L ]
vL (t) =
φ˙ L (t)
L
(a)
iL (t)
+
or
(b)
leading to the energy storage, release and lossless property.
5.3.4.2.1.1 Interconnection of LTI Inductors and or Independent & or
Controlled Sources
Similar to what we have seen for the case of LTI capacitor, we can connect an
LTI inductor with independent and or controlled sources to form an one-port
Figure 5-17. The symbol of a Linear (a),
and a nonlinear (b) time-invariant inductor.
Elements
Symbols
Equations & properties
Elements
Linear
resistor
i R (t)
+
Symbols
or
v R (t)
i R (t)= Gv R (t)
+
Nonlinear
resistor
Current controlled
nonlinear resistor
i R (t)
v R (t)
-
Voltage controlled
nonlinear resistor
-
i c (t) = c˙v c (t)
Linear
capacitor
+
∞
i c (t)
E(∞) =
v c (t)
Linear
inductor
∫ p(t)dt = 0
−∞
v L (t) = L ˙i L
i L (t)
+
∞
E(∞) =
v L (t)
1:N
i 2 (t)
+
+
v1 (t)
v 2 (t)
-
-
+
v1 (t)
-
i 2 (t)
+
v 2 (t)
-
Nonlinear
inductor
Flux controlled
nonlinear inductor
i L (t)
∫ v [q ]dq
c
c
c
i L (t) = i L [φ L (t)]
∞
E(∞) =
v L (t)
∫ p(t)dt = 0
−∞
E c [φ] =
φ
∫i
L
[φ L ]di L
φ cr
i 1 (t)
1 : N[x]
i 2 (t)
Nonlinear
transformer:
turns ratio N[x]
is a function
of the state of
the system.
•
+
+
v1 (t)
v 2 (t)
-
-
v 2 (t) N 0 v1 (t)
i 1 (t) = 0 − N i 2 (t)
p(t) = v1 (t)i 1 (t) + v2 (t)i 2 (t)
i 1(t)
+
v1 (t)
-
G[x]
i 2 (t)
+
v 2 (t)
-
A two-port
voltage
controlled
nonlinear gyrator.
The gyrator
coefficient G[x] is
a function of the
system state.
p(t) = v1 (t)i 1 (t) + v2 (t)i 2 (t)
Table 5-3. Linear and nonlinear time-invariant elements, the symbols, and the
defining equations.
∫ p(t)dt = 0
q
-
Nonlinear
transformer
= 0 for all t
∞
E(∞) =
E c [q] =
+
∫ p(t)dt = 0
i1 (t) G 0 v1 (t)
i 2 (t) = 0 −G v2 (t)
= 0 for v R = 0
i R (t)= i R[ vR (t) ]
≠ 0 for v R ≠ 0
v c (t) = v c [q c (t)]
q cr
= 0 for all t
G
= 0 for i R = 0
v R (t) = vR [i R (t) ]
≠ 0 for i R ≠ 0
−∞
-
Nonlinear
gyrator
i 1 (t)
v c (t)
1
E c [i L ] = Li 2L
2
•
Linear
transformer
Nonlinear
capacitor
Charge controlled
nonlinear capacitor
i c (t)
−∞
-
i 1(t)
+
1
E c [v c ] = cv 2c
2
-
Linear
gyrator
Equations & properties
vR (t)= Ri R (t)
Table 5-3 (Contd)
0 v1 (t)
v 2 (t) N[x]
i 1 (t) = 0
−N[x] i 2 (t)
p(t) = v1 (t)i 1 (t) + v2 (t)i 2 (t)
= 0 for all t
0 v1 (t)
i1 (t) G[x]
i 2 (t) = 0
−G[x] v2 (t)
p(t) = v1 (t)i 1 (t) + v2 (t)i 2 (t)
= 0 for all t
5.3.5 Multi-port devices with memory:
i 1 (t)
5.3.5.1 Two-port LTI coupled inductors
In section 5.2.3, we introduced the ideal transformer, a two-port memoryless
device formed from magnetically coupled coils (inductors) and having certain
ideal characteristic. In this section, we introduce more general multi-port devices
made up of magnetically coupled coils (multi-port. coupled inductors), and
discuss their properties. We will also derive a special class of two-port devices
with memory well known in the network theory as Brune Transformers (BT).
Finally, we will also show the conditions under which the two port devices with
memory can become ideal transformers with no memory.
Consider a magnetic core with two coils wound on the core leading to a twoport device with voltage polarities and current directions as shown in Fig. 5.18
{It should be obvious from the figure that a M-port device, where M > 2, is
possible by increasing the number of coils wound on the core}. If the first port is
driven by a time varying current source i1 (t) while the second port is kept open,
a time-varying magnetic flux will be produced on the core leading to a timevarying flux through the second coil. This time varying flux will lead to a
voltage across the open terminals of the second port. The polarity of the voltage
will depend upon the construction of the device and will normally be indicated
by a dot as shown in the figure.
Assuming a linear model, the current produces the flux linkage φ1 given by:
φ1 = L11i1
φ 2 = M12 i1
(5.64)
where, M12 is known as the mutual inductance.
In general, when both currents i1 (t) and i2 (t) are present, the linear model
assumption leads to
φ1 = L11i1 + M21i 2
(5.65)
where in practice
v1(t)
v2 (t)
(5.66)
i 2 (t)
•
+
+
v1 (t)
v 2 (t)
-
(b)
Figure 5-18. a) A magnetic core with two wound coils; b) Symbol for magnetically
coupled coils.
M 21 = M12 = M
(5.67)
The φ(t) −i(t) characteristics of the two-port linear coupled inductors can be
written in a matrix form as:
φ1 L 11
φ = M
2
M i1
L 22 i2
(5.68a)
or
φ = Li
(5.68b)
leading to a current controlled representation. If det[L] = L11 L22 − M 2 is not
equal to zero, the above equation can be rewritten in a flux controlled
representation as
i = L−1 φ
=
and similarly for the second coil
φ 2 = M12 i1 + L 22i 2
i2 (t)
(a)
(5.63)
where, L 11 is the self-inductance of the coil 1. Similarly, the flux linkage in the
coil 2 by the current i1 (t) will be give by:
i1(t)
1
Det[L]
L 22
−M
−M φ1
L11 φ 2
(5.69)
= τφ
where τ = L−1 is the reciprocal inductance matrix. Since the voltage induced in
each coil is given by Faraday’s law as the time rate of change of flux, we have,
v1
v =
2
φ˙ 1 L11
˙ = M
φ 2
M ˙i1
L 22 ˙i 2
(5.70a)
E[0,T] ≥ 0 iff L 11L 22 ≥ M2
or
v = φ˙ = L ˙i
or
Further, from the expression for the delivered energy, we can note that for all
i(t) ≠ 0
(5.70b)
˙i = L−1 φ= τv
(5.71)
(5.73)
That is, positive energy is delivered to the coupled inductors. Thus
i1 = i2 = φ1 = φ 2 = 0 can be considered as the relaxation points for the two-port
coupled inductors and E[0, T] as the energy stored in them.
The conditions,
L11 > 0
L 22 > 0
L 11L 22 ≥ M or Det[L] = L11 L 22 − M ≥ 0
5.3.5.1.1 Stored Energy and the Inductance Matrix Parameters:
We can study the energy supplied to the coupled inductors and obtain conditions
on the inductance matrix parameters for physical realizability. Let us assume
that i1 (t) and i2 (t) are the two sources connected to the two ports at time t = 0
with i1 (0) = i 2 (0) = 0 and φ1 (0 − ) = φ2 (0 − ) = 0 .The energy delivered by the
sources to the coupled inductor over the interval [0, T] is given by:
E[0,T] =
T
∫ {v (τ)i
1
1
(5.74)
2
are the necessary and sufficient conditions for the real symmetric matrix L to be
positive semi-definite. Thus, we find that there is a direct connection between
passivity (a physical condition) and the positive definiteness (a mathematical
condition).
We can define a new parameter k as
k= M
(τ) + v 2 (τ)i 2 (τ)}dτ
L 11L 22
(5.75)
τ=0
=
T
∫ {(L
11
τ=0
di1
di
di
di
+ M 2 )i1 (τ) + (M 1 + L 22 2 )i 2 (τ)}dτ
dτ
dτ
dτ
dτ
i(T)
=
∫L
i di1 + M(i 1di 2 + i 2di1 ) + L 22 i2 di2
11 1
(5.72)
i(0)
=
1
2
[L
i (T) + 2Mi 1 (T)i 2 (T) + L 22 i22
2
11 1
]
M
M2 2
= 12 L11{i1 (T) +
i2 (T)} 2 + {L22 −
}i 2 (T)
L11
L11
A number of points can be observed from the above equations. If for some T
> 0, i1 (T) = i 2 (T) = 0 and i1 (t) , i 2 ( t ) ( 0 < t < T) in general is not equal to
zero, E becomes non-zero for 0 < t < T and returns to zero value at t = T. That is,
the net energy consumed by (or delivered to) the coupled coil is exactly equal to
zero indicating that the device is lossless and capable of storing energy. Further,
if we assume that the second coil were completely absent, the coupled coil
becomes a simple inductor and the energy delivered will be positive iff
i1 (T) ≠ 0 and L 11 > 0 . Thus, we can assume that L 11 is positive. A similar
reasoning will show that L 22 is also positive.
The value of the mutual inductance can in general be positive or negative.
where k = 0 (M = 0) implies the one extreme case where there is no effect due to
the current in one coil on the other or no magnetic coupling between the two
coils. Thus, k can be called the coefficient of coupling. When k = 1
( M 2 = L11L 22 ) we can note that the second term in the energy expression (5.72)
becomes zero regardless of whether i 2 (T) equal zero or not. Further, we can
note that the first term in the energy expression also becomes zero when
i1 = − (M L 11 )i 2 ≠ 0 for any T. That is, the device becomes a memoryless
device for this particular combination of { i1 , i2 }. Physically this implies that all
magnetic field due to i1 is completely canceled by the magnetic field due to i 2 ,
a situation not possible in practice.
Hence k = 1 represents the other extreme case. The coefficient of coupling in
general satisfies the inequality 0 < k < 1. A magnetically coupled inductors with
unity coefficients of coupling ( k = 1) is known as a Brune Transformer in
network theory and plays an important role in network synthesis as we will see
later.
5.3.5.1.2 Equivalent Circuit Representation of magnetically coupled multiport inductors based on Ideal Transformers:
We can represent the magnetically coupled inductors by a circuit consisting of
two terminal (one-port) inductors or inductors and ideal transformer
combination as shown in Fig. 5.19 a and b . The equivalence can be shown by
comparing the φ − i or v − i relationship for the two circuits shown in the
Figures with that of the equation of the magnetically coupled inductors given in
(5.65). It can be noted from the T - equivalent circuit and the constraint on the
coefficient of coupling (0 < k < 1), that the value of at most one inductor in the
equivalent circuit can be negative. In Fig. 5.19b, the equivalent circuit consists
of an ideal transformer and two inductors L L and L m . It can be observed that
L L = 0 implies K = 1. Thus, L can be considered to be the inductance seen at
the first port due to the leakage flux or the lines of the magnetic field that do not
link both coils and hence the name leakage inductance. The inductor L m which
appears at both ports represents the magnetic flux common to both the coils and
can be called the magnetizing inductance. Since both L L = 0,L L and L m > 0,
from the figure, we can infer that a linear coupled inductor is not really a new
device in the sense that it can be constructed from previously defined elements,
the inductor and the ideal transformer.
By using M ( > 2) magnetically coupled coils we can arrive at a M-Port coupled
inductor with expressions similar to the expressions for two-port magnetically
coupled inductors. Since the concept is the same , we will not repeat them here.
However, it should be noted that the L matrix of such an M-Port device will be
symmetric, positive definite and the off-diagonal elements (mutual inductances)
can be positive or negative.
5.3.5.3 Nonlinear Time Invariant Coupled Inductors:
Similar to the case of nonlinear inductors, we can obtain nonlinear, timeinvariant coupled inductors by forcing the φ − i characteristics to be nonlinear
and independent of time. Thus for two port current controlled nonlinear coupled
inductors we will have:
φ 2 = φ 2 [i1 ,i 2 ]
i1(t) 1 : N i2 (t)
Lm
i1(t)
(5.76)
where are the scalar-valued functions of the two variables i1 and i 2 . Using
the relationship v k = φ˙ k (k = 1,2) , we can obtain a relationship between
v and i as:
+
•
+
v1` (t)
v2 (t)
-
-
L 2 = L22 − M
L 1 = L11 − M
i2 (t)
Ideal
transformer N = L 22 M
+
+
L3 = M
v1 (t)
5.3.5.2 M-Port (M > 2) LTI Coupled Inductors:
φ1 = φ1 [i1 ,i 2 ]
La
Brune transformer
(k = 1); L m = M L 22
2
v 2 (t)
Lm
L=
NL m
-
-
NL m
N 2Lm
General, magnetically coupled inductors
La = L11 − M 2 L22 ≥ 0
(a)
(b)
Figure 5-19. Representation of magnetically coupled inductors; a) T-equivalent circuit; b)
Constraints that lead to a Brune transformer and an ideal transformer.
φ˙ (t)
v (t)
v = 1 = φ˙ = ˙ 1
v2 (t)
φ 2 (t)
∂φ1
∂i1 i
=
∂φ
2 ∂i
1i
˙
= L[i] i
∂φ1
∂i 2 i ˙i1 (t)
˙
∂φ2
i 2 (t)
∂i2 i
(5.77)
where ∂φ j ∂i k1 i (j, k = 1, 2) are the partial derivatives evaluated at i . This
matrix, denoted as L[i ] here is in general called the Jacobian matrix J of φ .
For a two-port flux controlled nonlinear inductor, the corresponding
expressions are:
i1 = i1 [φ1 , φ 2 ]
(5.78)
i 2 = i2 [φ1 , φ 2 ]
and
∂i1
di
(t)
dt
d[i] 1
∂φ1 φ
=
=
dt
di2 (t) dt ∂i 2
∂φ 1 φ
∂φ 2 φ φ˙ 1(t)
˙
∂i2
φ 1(t)
∂φ 2 φ
∂i1
(5.79)
where τ 11 , τ 22 > 0, τ 11τ 22 ≥ τ122 . The resulting stored energy expression is given
by:
E[φ1 , φ 2 ] = 0.5(τ 11φ21 +τ 22 φ 22 + τ12 φ1φ 2 ) + aφ21 m φ 2n
2
which is always positive. The origin is the relaxation point for this NLTI mutual
inductor.
When the NLTI mutual inductor is current controlled, the expression for net
energy entering the device will be given by:
E[0,T] =
∂φ1 ˙
∂φ
∂φ
∂φ
i1 (t) + 1 ˙i2 (t) i1 (τ) + 2 ˙i1 (t) + 2 ˙i 2 (t) i 2 (τ) dτ
∂i 2
∂i2
∂i1
τ=0 ∂i 1
T
∫
i(T)
=
∂φ1
∫ ∂i
i(0)
We can study the energy supplied to the NLTI coupled inductors and obtain
conditions on the nonlinear functions for physical realizability. Let us first
consider a flux controlled device. The energy going into the coupled inductor
over the interval [0,T] is given by:
T
∫ {v (τ)i
1
1
T
∫ {φ˙ 1 (τ)i 1 (φ1, φ 2 ) + φ˙ 2 (τ)i 2 (φ 1, φ 2 )}dτ
(5.80)
τ=0
φ (T)
=
∫ i (φ , φ
1
1
2
)dφ1 + i2 (φ1 , φ 2 )dφ2
φ(0)
which depends on the end conditions only and can become zero when the initial
value of the flux vector equals the final value and regardless of what value the
flux takes in between. Thus, energy will be going in at some times and returned
at other times. Therefore, similar to the LTI mutual inductor, its nonlinear
counterpart is also lossless and capable of storing energy. Again, to make the
device a passive one (returned energy is less than or equal to the energy went
in), we need to restrict the current mappings such that E[0, T] is non-negative.
An example of a flux controlled NLTI mutual inductor is given by:
i1 (φ1 , φ2 ) = τ11φ 1 + τ 12φ 2 + aφ12m−1φ 2n
,
2
−1
i 2 (φ1 , φ2 ) = τ 21φ1 + τ 22φ 2 + aφ12m φ 2n
; a > 0; m, n > 0 & integer
2
∂φ
∂φ 2
∂φ
i 2 di1 + 1 i1 + 2 i2 di 2
∂i1
∂i2
∂i2
Again, the device exhibits the lossless property. The expressions for the flux
have to be selected such that the net energy entering the device is always
positive.
5.4 Summary
(τ) + v 2 (τ)i 2 (τ)}dτ
τ=0
=
1
i1 +
(5.83)
5.3.5.3.1 Energy Stored in a NLTI coupled Inductor:
E[0,T] =
(5.82)
(5.81)
In this chapter, we discussed time-invariant linear and nonlinear electrical
elements that are the building blocks for complex electrical circuits. We first
provided a formal definition for ideal energy sources and discussed the
implications of such assumptions from a real-world perspective. Next, using the
two key quantities, power and energy, we defined passive and active elements.
Various possibilities for passive elements were explored based on the number of
terminals and the characteristics of the devices (linear or nonlinear, memory or
no memory). We found that a number of complex nonlinear devices are indeed
possible using the power and energy consumption property. Further, we noted
that when a LTI capacitor is connected to independent or dependent sources in a
certain fashion, it can lead to an one-port circuit which is basically lossless.
From the duality principles, similar circuits can be obtained using LTI inductors.
These elements or building blocks (including the one-port circuit discussed) can
be used to form complex circuits and dynamics as we discussed before, and as
we will see in later chapters. We will also use the same approach to define timevarying elements for forming time-varying networks and dynamics.