Eighth Edition
CHAPTER
9
VECTOR MECHANICS FOR ENGINEERS:
STATICS
Ferdinand P. Beer
E. Russell Johnston, Jr.
Lecture Notes:
Distributed Forces:
Moments of Inertia
J. Walt Oler
Texas Tech University
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Contents
Introduction
Moments of Inertia of an Area
Moment of Inertia of an Area by
Integration
Polar Moment of Inertia
Radius of Gyration of an Area
Sample Problem 9.1
Sample Problem 9.2
Parallel Axis Theorem
Moments of Inertia of Composite Areas
Sample Problem 9.4
Sample Problem 9.5
Product of Inertia
Principal Axes and Principal Moments of
Inertia
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
Sample Problem 9.6
Sample Problem 9.7
Mohr’s Circle for Moments and Products of
Inertia
Sample Problem 9.8
Moment of Inertia of a Mass
Parallel Axis Theorem
Moment of Inertia of Thin Plates
Moment of Inertia of a 3D Body by
Integration
Moment of Inertia of Common Geometric
Shapes
Sample Problem 9.12
Moment of Inertia With Respect to an
Arbitrary Axis
Ellipsoid of Inertia. Principle Axes of Axes
of Inertia of a Mass
9- 2
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Introduction
• Previously considered distributed forces which were proportional to the area
or volume over which they act.
- The resultant was obtained by summing or integrating over the areas or
volumes.
- The moment of the resultant about any axis was determined by
computing the first moments of the areas or volumes about that axis.
• Will now consider forces which are proportional to the area or volume over
which they act but also vary linearly with distance from a given axis.
- It will be shown that the magnitude of the resultant depends on the first
moment of the force distribution with respect to the axis.
- The point of application of the resultant depends on the second moment
of the distribution with respect to the axis.
• Current chapter will present methods for computing the moments and products
of inertia for areas and masses.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9- 3
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moment of Inertia of an Area
• Consider distributed forces ∆ Fwhose magnitudes are
proportional to the elemental areas
∆on
A which they act
and also vary linearly with the distance of
∆A
from a given axis.
• Example: Consider a beam subjected to pure bending.
Internal forces vary linearly with distance from the neutral
axis which passes through the section centroid.
∆ F = ky ∆A
R = k ∫ y dA = 0
M = k ∫ y 2 dA
∫ y dA = Q x = first moment
2
y
∫ dA = second moment
• Example: Consider the net hydrostatic force on a
submerged circular gate.
∆ F = p ∆ A = γy∆ A
R = γ ∫ y dA
M x = γ ∫ y 2 dA
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9- 4
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
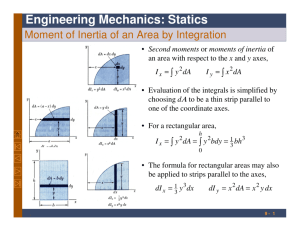
Moment of Inertia of an Area by Integration
• Second moments or moments of inertia of an
area with respect to the x and y axes,
I x = ∫ y 2 dA
I y = ∫ x 2 dA
• Evaluation of the integrals is simplified by
choosing dΑ to be a thin strip parallel to one
of the coordinate axes.
• For a rectangular area,
2
h
I x = ∫ y dA = ∫ y 2 bdy = 13 bh 3
0
• The formula for rectangular areas may also be
applied to strips parallel to the axes,
dI x =
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
1
3
y 3 dx
dI y = x 2 dA = x 2 y dx
9- 5
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Polar Moment of Inertia
• The polar moment of inertia is an important
parameter in problems involving torsion of
cylindrical shafts and rotations of slabs.
J 0 = ∫ r 2 dA
• The polar moment of inertia is related to the
rectangular moments of inertia,
J 0 = ∫ r 2 dA =
(∫ x 2 + y 2 )dA = ∫ x 2 dA + ∫ y 2 dA
= Iy + Ix
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9- 6
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Radius of Gyration of an Area
• Consider area A with moment of inertia Ix.
Imagine that the area is concentrated in a
thin strip parallel to the x axis with
equivalent Ix.
Ix
I x = k x2 A
kx =
A
kx = radius of gyration with respect to
the x axis
• Similarly,
Iy =
k y2 A
J O = k O2 A
ky =
kO =
Iy
A
JO
A
k O2 = k x2 + k y2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9- 7
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.1
SOLUTION:
• A differential strip parallel to the x axis is chosen for dA.
dI x = y 2 dA
dA = l dy
• For similar triangles,
Determine the moment of inertia
of a triangle with respect to its
base.
l h− y
=
b
h
l =b
h− y
h
dA = b
h− y
dy
h
• Integrating dIx from y = 0 to y = h,
h− y
bh 2
I x = ∫ y dA = ∫ y b
dy = ∫ hy − y 3 dy
h
h0
0
2
h
(
2
h
b y3 y 4
= h
−
h 3
4
0
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
)
bh 3
I x=
12
9- 8
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.2
SOLUTION:
• An annular differential area element is chosen,
dJ O = u 2 dA
dA = 2π u du
r
r
2
J O = ∫ dJ O = ∫ u (2π u du ) = 2π ∫ u 3du
0
0
JO =
a) Determine the centroidal polar
moment of inertia of a circular area
by direct integration.
π
2
r4
• From symmetry, Ix = Iy,
b) Using the result of part a, determine
the moment of inertia of a circular
area with respect to a diameter.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
JO = I x + I y = 2I x
π
2
r 4 = 2I x
I diameter = I x =
π
4
r4
9- 9
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Parallel Axis Theorem
• Consider moment of inertia I of an area A with
respect to the axis AA’
I = ∫ y 2 dA
• The axis BB’ passes through the area centroid and
is called a centroidal axis.
I = ∫ y 2 dA =
2
′
(
)
y
+
d
dA
∫
= ∫ y ′ 2 dA + 2 d ∫ y ′dA + d 2 ∫ dA
I = I + Ad 2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
parallel axis theorem
9 - 10
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Parallel Axis Theorem
• Moment of inertia IT of a circular area with
respect to a tangent to the circle,
( )
I T = I + Ad 2 = 14 π r 4 + π r 2 r 2
= 54 π r 4
• Moment of inertia of a triangle with respect to a
centroidal axis,
I AA′ = I BB ′ + Ad 2
I BB ′ = I AA′ − Ad
2
=
1 bh 3
12
−
( )
1 bh 1 h 2
2
3
1 bh 3
= 36
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 11
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moments of Inertia of Composite Areas
• The moment of inertia of a composite area A about a given axis is
obtained by adding the moments of inertia of the component areas A1,
A2, A3, ... , with respect to the same axis.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 12
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moments of Inertia of Composite Areas
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 13
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.4
SOLUTION:
• Determine location of the centroid of
composite section with respect to a
coordinate system with origin at the
centroid of the beam section.
The strength of a W14x38 rolled steel
beam is increased by attaching a plate to
its upper flange.
• Apply the parallel axis theorem to
determine moments of inertia of beam
section and plate with respect to composite
section centroidal axis.
• Calculate the radius of gyration from the
moment of inertia of the composite section.
Determine the moment of inertia and
radius of gyration with respect to an axis
which is parallel to the plate and passes
through the centroid of the section.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 14
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.4
SOLUTION:
• Determine location of the centroid of composite section with
respect to a coordinate system with origin at the centroid of
the beam section.
Section
A, in 2
y , in.
y A, in 3
Plate
6.75
7.425
50 .12
Beam Section
11.20
0
0
∑ A = 17 .95
Y ∑ A = ∑ yA
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
∑ y A = 50 .12
yA 50.12 in 3
∑
Y =
=
= 2.792 in.
2
∑ A 17.95 in
9 - 15
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.4
• Apply the parallel axis theorem to determine moments of inertia
of beam section and plate with respect to composite section
centroidal axis.
I x ′, beam section = I x + AY 2 = 385 + (11 .20 )(2.792 )2
= 472 .3 in 4
( )3 + (6.75 )(7.425 − 2.792 )2
1 (9 ) 3
I x ′, plate = I x + Ad 2 = 12
4
= 145 .2 in 4
I x ′ = I x ′, beam section + I x ′, plate = 472 .3 + 145 .2
I x ′ = 618 in 4
• Calculate the radius of gyration from the moment of inertia of
the composite section.
k x′ =
I x ′ 617 .5 in 4
=
A 17.95 in 2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
k x ′ = 5 .87 in.
9 - 16
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.5
SOLUTION:
• Compute the moments of inertia of the
bounding rectangle and half-circle with
respect to the x axis.
• The moment of inertia of the shaded area is
obtained by subtracting the moment of inertia
of the half-circle from the moment of inertia
of the rectangle.
Determine the moment of inertia of
the shaded area with respect to the x
axis.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 17
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.5
SOLUTION:
• Compute the moments of inertia of the bounding
rectangle and half-circle with respect to the x axis.
Rectangle:
I x = 13 bh 3 =
1
3
(240 )(120 ) = 138 .2 × 10 6 mm 4
Half-circle:
moment of inertia with respect to AA’,
I AA′ = 18 π r 4 = 18 π (90 )4 = 25 .76 × 10 6 mm 4
moment of inertia with respect to x’,
4 r (4 )(90 )
a=
=
= 38 .2 mm
3π
3π
b = 120 - a = 81.8 mm
A = 12 πr 2 = 12 π (90 )2
(
)(
I x ′ = I AA′ − Aa 2 = 25 .76 × 10 6 12 .72 × 10 3
)
= 7 .20 × 10 6 mm 4
moment of inertia with respect to x,
(
)
I x = I x ′ + Ab 2 = 7 .20 × 10 6 + 12 .72 × 10 3 (81 .8 )2
= 12 .72 × 10 3 mm 2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
= 92 .3 × 10 6 mm 4
9 - 18
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.5
• The moment of inertia of the shaded area is obtained by
subtracting the moment of inertia of the half-circle from the
moment of inertia of the rectangle.
Ix
=
138 .2 × 10 6 mm 4
−
92 .3 × 10 6 mm 4
I x = 45.9 × 106 mm 4
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 19
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Product of Inertia
• Product of Inertia:
I xy = ∫ xy dA
• When the x axis, the y axis, or both are an
axis of symmetry, the product of inertia is
zero.
• Parallel axis theorem for products of inertia:
I xy = I xy + x y A
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 20
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Principal Axes and Principal Moments of Inertia
• The change of axes yields
Ix + Iy Ix − Iy
I x′ =
+
cos 2θ − I xy sin 2θ
2
2
Ix + Iy Ix − Iy
−
I y′ =
cos 2θ + I xy sin 2θ
2
2
Ix − Iy
I x′y ′ =
sin 2θ + I xy cos 2θ
2
Given I x = ∫ y 2 dA
I y = ∫ x 2 dA
I xy = ∫ xy dA
• The equations for Ix’ and Ix’y’ are the
parametric equations for a circle,
(I x′ − I ave )2 + I x2′y′ = R 2
we wish to determine moments and
product of inertia with respect to
new axes x’ and y’.
Note:
x ′ = x cos θ + y sin θ
y ′ = y cos θ − x sin θ
Ix + Iy
I ave =
2
Ix − Iy
2
+ I xy
R =
2
• The equations for Iy’ and Ix’y’ lead to the same
circle.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 21
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Principal Axes and Principal Moments of Inertia
• At the points A and B, Ix’y’ = 0 and Ix’ is a
maximum and minimum, respectively.
I max, min = I ave ± R
tan 2θ m = −
2 I xy
Ix − Iy
• The equation for Θm defines two angles,
90o apart which correspond to the
principal axes of the area about O.
(I x′ − I ave )2 + I x2′y′ = R 2
Ix + I y
I ave =
2
• Imax and Imin are the principal moments of
inertia of the area about O.
Ix − I y 2
+ I xy
R =
2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 22
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.6
SOLUTION:
• Determine the product of inertia using direct
integration with the parallel axis theorem on
vertical differential area strips
• Apply the parallel axis theorem to evaluate
the product of inertia with respect to the
centroidal axes.
Determine the product of inertia of
the right triangle (a) with respect to
the x and y axes and
(b) with respect to centroidal axes
parallel to the x and y axes.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 23
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.6
SOLUTION:
• Determine the product of inertia using direct integration
with the parallel axis theorem on vertical differential area
strips
x
x
y = h 1 − dA = y dx = h 1 − dx
b
b
x
xel = x
yel = 12 y = 12 h 1 −
b
Integrating dIx from x = 0 to x = b,
b
I xy = ∫ dI xy = ∫ xel yel dA = ∫ x
0
b
2
2
x
h 1 − dx
b
()
1
2
2
b
x 2 x3 x 4
x
x
2 x
=h ∫
−
+
dx = h −
+ 2
2 b 2b 2
0
4 3b 8b 0
2
3
I xy =
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
1 b2h2
24
9 - 24
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.6
• Apply the parallel axis theorem to evaluate the product
of inertia with respect to the centroidal axes.
x = 13 b
y = 13 h
With the results from part a,
I xy = I x ′′y ′′ + x y A
I x ′′y ′′ =
1 b2h2
24
−
(13 b )(13 h )(12 bh )
1 b 2h 2
I x′′y′′ = − 72
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 25
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.7
SOLUTION:
• Compute the product of inertia with respect
to the xy axes by dividing the section into
three rectangles and applying the parallel
axis theorem to each.
• Determine the orientation of the principal
axes (Eq. 9.25) and the principal moments
of inertia (Eq. 9. 27).
For the section shown, the moments of
inertia with respect to the x and y axes are
Ix = 10.38 in4 and Iy = 6.97 in4.
Determine (a) the orientation of the
principal axes of the section about O, and
(b) the values of the principal moments of
inertia about O.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 26
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.7
SOLUTION:
• Compute the product of inertia with respect to the xy axes by
dividing the section into three rectangles.
Apply the parallel axis theorem to each rectangle,
(
I xy = ∑ I x ′y ′ + x y A
)
Note that the product of inertia with respect to centroidal
axes parallel to the xy axes is zero for each rectangle.
Rectangle Area, in 2
I
II
III
y , in.
x yA, in 4
1.5 − 1.25 + 1.75
− 3.28
1.5
x , in.
0
0
0
1.5 + 1.25 − 1.75
− 3.28
∑ x yA = −6.56
I xy = ∑ x yA = −6.56 in 4
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 27
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.7
• Determine the orientation of the principal axes (Eq. 9.25)
and the principal moments of inertia (Eq. 9. 27).
tan 2θ m = −
2 I xy
Ix − I y
=−
2(− 6.56)
= +3.85
10.38 − 6.97
2θ m = 75.4° and 255.4°
θ m = 37.7° and θ m = 127.7°
I x = 10.38 in
I y = 6.97 in
4
I max,min =
4
I xy = −6.56 in 4
Ix + I y
2
2
Ix − I y
2
+ I xy
±
2
2
10.38 + 6.97
10.38 − 6.97
2
=
±
+ (− 6.56 )
2
2
I a = I max = 15.45 in 4
I b = I min = 1.897 in 4
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 28
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Mohr’s Circle for Moments and Products of Inertia
• The moments and product of inertia for an area are
plotted as shown and used to construct Mohr’s
circle,
Ix + Iy
I ave =
2
Ix − Iy
2
+ I xy
R =
2
• Mohr’s circle may be used to graphically or
analytically determine the moments and product of
inertia for any other rectangular axes including the
principal axes and principal moments and products of
inertia.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 29
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.8
SOLUTION:
• Plot the points (Ix , Ixy) and (Iy ,-Ixy).
Construct Mohr’s circle based on the
circle diameter between the points.
• Based on the circle, determine the
orientation of the principal axes and the
principal moments of inertia.
The moments and product of inertia with
respect to the x and y axes are Ix =
7.24x106 mm4, Iy = 2.61x106 mm4, and Ixy
= -2.54x106 mm4.
• Based on the circle, evaluate the
moments and product of inertia with
respect to the x’y’ axes.
Using Mohr’s circle, determine (a) the
principal axes about O, (b) the values of
the principal moments about O, and (c) the
values of the moments and product of
inertia about the x’ and y’ axes
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 30
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.8
SOLUTION:
• Plot the points (Ix , Ixy) and (Iy ,-Ixy). Construct Mohr’s
circle based on the circle diameter between the points.
(I x + I y ) = 4.925 × 10 6 mm 4
CD = 12 (I x − I y ) = 2 .315 × 10 6 mm 4
OC = I ave =
R=
I x = 7.24 × 106 mm 4
I xy = −2.54 × 10 mm
(CD )2 + (DX )2
= 3.437 × 10 6 mm 4
• Based on the circle, determine the orientation of the
principal axes and the principal moments of inertia.
I y = 2.61 × 106 mm 4
6
1
2
4
tan 2θ m =
DX
= 1.097
CD
2θ m = 47 .6°
θ m = 23 .8°
I max = OA = I ave + R
I max = 8.36 × 10 6 mm 4
I min = OB = I ave − R
I min = 1 .49 × 10 6 mm 4
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 31
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.8
• Based on the circle, evaluate the moments and product of
inertia with respect to the x’y’ axes.
The points X’ and Y’ corresponding to the x’ and y’ axes are
obtained by rotating CX and CY counterclockwise through
an angle Θ = 2(60o) = 120o. The angle that CX’ forms with
the x’ axes is φ = 120o - 47.6o = 72.4o.
I x ' = OF = OC + C X ′ cos ϕ = I ave + R cos 72 .4 o
I x ′ = 5 .96 × 10 6 mm 4
I y ' = OG = OC − C Y ′ cos ϕ = I ave − R cos 72 .4 o
I y ′ = 3.89 × 10 6 mm 4
I x ′y ' = FX ′ = C Y ′ sin ϕ = R sin 72 .4 o
OC = I ave = 4.925 × 106 mm 4
I x ′y ′ = 3.28 × 10 6 mm 4
R = 3.437 × 106 mm 4
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 32
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moment of Inertia of a Mass
• Angular acceleration about the axis AA’ of the
small mass ∆m due to the application of a couple
is proportional to r2∆m.
r2∆m = moment of inertia of the mass
∆m with respect to the axis AA’
• For a body of mass m the resistance to rotation
about the axis AA’ is
I = r12 ∆ m + r22 ∆ m + r32 ∆ m + = ∫ r 2 dm = mass moment of inertia
• The radius of gyration for a concentrated mass
with equivalent mass moment of inertia is
2
I =k m
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
k=
I
m
9 - 33
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moment of Inertia of a Mass
• Moment of inertia with respect to the y coordinate
axis is
I y = ∫ r 2 dm =
(∫ z 2 + x 2 )dm
• Similarly, for the moment of inertia with respect to the
x and z axes,
Ix =
2
2
∫ (y + z )dm
Iz =
(∫ x 2 + y 2 )dm
• In SI units,
(
I = ∫ r 2 dm = kg ⋅ m 2
)
In U.S. customary units,
lb ⋅ s 2 2
2
I = slug ⋅ ft =
ft = lb ⋅ ft ⋅ s 2
ft
(
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
)
(
)
9 - 34
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Parallel Axis Theorem
• For the rectangular axes with origin at O and parallel
centroidal axes,
Ix =
[
]
2
2
2
2
∫ (y + z )dm = ∫ ( y ′ + y ) + ( z ′ + z ) dm
(∫ y ′ 2 + z ′ 2 )dm + 2 y ∫ y ′dm + 2 z ∫ z ′dm + (y 2 + z 2 )∫ dm
I x = I x ′ + m (y 2 + z 2 )
I y = I y′ + m(z 2 + x 2 )
I z = I z′ + m(x 2 + y 2 )
=
• Generalizing for any axis AA’ and a parallel centroidal axis,
I = I + md 2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 35
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moments of Inertia of Thin Plates
• For a thin plate of uniform thickness t and homogeneous
material of density ρ, the mass moment of inertia with respect
to axis AA’ contained in the plate is
I AA′ = ∫ r 2 dm = ρt ∫ r 2 dA
= ρ t I AA′, area
• Similarly, for perpendicular axis BB’ which is also
contained in the plate,
I BB ′ = ρ t I BB ′, area
• For the axis CC’ which is perpendicular to the plate,
I C C ′ = ρ t J C , area = ρ t (I AA′, area + I BB ′, area )
= I A A′ + I B B ′
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 36
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moments of Inertia of Thin Plates
• For the principal centroidal axes on a rectangular plate,
(121 a 3b ) = 121 ma 2
1 ab 3 ) = 1 mb 2
I BB′ = ρ t I BB′,area = ρ t (12
12
1 m(a 2 + b 2 )
I CC ′ = I AA′,mass + I BB′,mass = 12
I AA′ = ρ t I AA′, area = ρ t
• For centroidal axes on a circular plate,
I AA′ = I BB ′ = ρ t I AA′, area = ρ t
(14 π r 4 ) = 14 mr 2
I CC ′ = I AA′ + I BB′ = 12 mr 2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 37
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moments of Inertia of a 3D Body by Integration
• Moment of inertia of a homogeneous body is
obtained from double or triple integrations of
the form
I = ρ ∫ r 2 dV
• For bodies with two planes of symmetry, the
moment of inertia may be obtained from a
single integration by choosing thin slabs
perpendicular to the planes of symmetry for
dm.
• The moment of inertia with respect to a
particular axis for a composite body may be
obtained by adding the moments of inertia
with respect to the same axis of the
components.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 38
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moments of Inertia of Common Geometric Shapes
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 39
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.12
SOLUTION:
• With the forging divided into a prism and
two cylinders, compute the mass and
moments of inertia of each component with
respect to the xyz axes using the parallel axis
theorem.
• Add the moments of inertia from the
components to determine the total moments of
inertia for the forging.
Determine the moments of inertia of
the steel forging with respect to the
xyz coordinate axes, knowing that the
specific weight of steel is 490 lb/ft3.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 40
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.12
SOLUTION:
• Compute the moments of inertia of
each component with respect to the
xyz axes.
cylinders (a = 1in . , L = 3in ., x = 2 .5in ., y = 2in. ) :
I x = 12 ma 2 + m y 2
=
1
2
)(
)
2
1
0 .0829 12
−3
(
= 2 .59 × 10
[
( )
+ (0.0829 )
2 2
12
lb ⋅ ft ⋅ s 2
]
1 m 3a 2 + L2 + mx 2
I y = 12
1 (0.0829 )3 1
= 12
12
( )2 + (123 )2 + (0.0829)(212.5 )2
= 4.17 × 10−3 lb ⋅ ft ⋅ s 2
each cylinder :
m=
γV
g
(
490 lb/ft )(π × 1 × 3)in
=
(1728in3 ft3 )(32.2 ft s2 )
3
m = 0.0829 lb ⋅ s 2 ft
2
3
[
] [
1 m 3a 2 + L2 + m x 2 + y 2
I y = 12
1
= 12
(0.0829)3 121
3 2 +
12
( ) +( )
2
]
(0.0829)
2 2
12
( ) +( )
2.5 2
12
= 6.48 × 10−3 lb ⋅ ft ⋅ s 2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 41
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Sample Problem 9.12
prism (a = 2 in., b = 6 in., c = 2 in.):
[
]
1 m b 2 + c 2 = 1 (0 .211 ) 6
I x = I z = 12
12
12
( )2 + (122 )2
= 4 .88 × 10 − 3 lb ⋅ ft ⋅ s 2
[
]
1 m c 2 + a 2 = 1 (0.211) 2
I y = 12
12
12
( )2 + (122 )2
= 0.977 × 10−3 lb ⋅ ft ⋅ s 2
• Add the moments of inertia from the components to
determine the total moments of inertia.
I x = 4 .88 × 10 − 3 + 2 2 .59 × 10 − 3
(
)
I x = 10 .06 × 10 − 3 lb ⋅ ft ⋅ s 2
prism :
m=
γV
g
(
490 lb/ft 3 )(2 × 2 × 6 )in 3
=
(1728in3 ft3 )(32.2 ft s2 )
m = 0.211 lb ⋅ s 2 ft
(
I y = 0 .977 × 10 − 3 + 2 4 .17 × 10 − 3
)
I y = 9 .32 × 10 − 3 lb ⋅ ft ⋅ s 2
(
I z = 4.88 × 10 − 3 + 2 6.48 × 10 − 3
)
I z = 17 .84 × 10 − 3 lb ⋅ ft ⋅ s 2
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 42
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Moment of Inertia With Respect to an Arbitrary Axis
• IOL = moment of inertia with respect to axis OL
2
2
I OL = ∫ p dm = ∫ λ × r dm
• Expressing λ and r in terms of the vector components
and expanding yields
I OL = I x λ 2x + I y λ 2y + I z λ 2z
− 2 I xy λ x λ y − 2 I yz λ y λ z − 2 I zx λ z λ x
• The definition of the mass products of inertia of a mass
is an extension of the definition of product of inertia of
an area
I xy = ∫ xy dm = I x ′y ′ + m x y
I yz = ∫ yz dm = I y ′z ′ + m y z
I zx = ∫ zx dm = I z ′x ′ + m z x
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 43
Eighth
Edition
Vector Mechanics for Engineers: Dynamics
Ellipsoid of Inertia. Principal Axes of Inertia of a Mass
• Assume the moment of inertia of a body has been
computed for a large number of axes OL and that point Q is
plotted on each axis at a distance
OQ = 1 I OL
• The locus of points Q forms a surface known as the
ellipsoid of inertia which defines the moment of inertia of
the body for any axis through O.
• x’,y’,z’ axes may be chosen which are the principal axes of
inertia for which the products of inertia are zero and the
moments of inertia are the principal moments of inertia.
© 2007 The McGraw-Hill Companies, Inc. All rights reserved.
9 - 44