Second Order Filters Overview • What's different about
advertisement

Second Order Filters Overview
• What’s different about second order filters
• Resonance
• Standard forms
• Frequency response and Bode plots
• Sallen-Key filters
• General transfer function synthesis
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
1
Prerequisites and New Knowledge
Prerequisite knowledge
• Ability to perform Laplace transform circuit analysis
• Ability to solve for the transfer function of a circuit
• Ability to generate and interpret Bode plots
New knowledge
• Ability to design second-order filters
• Knowledge of the advantages of transfer functions with complex
poles and zeros
• Understanding of resonance
• Familiarity with second-order filter properties
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
2
Y (s) =
Motivation
!
PM
k
k=0 bk s
X(s) = H(s)X(s)
PN
k
k=0 ak s
• Second order filters are filters with a denominator polynomial that
is of second order
• Usually the roots (poles) are complex
p1,2
p
= −ζωn ± jωn 1 − ζ 2
• In many applications, second order filters may be sufficient
• Are also the building blocks for higher-order filters
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
3
Standard Form
H(s) =
s2
2
ωn
N (s)
s
+ Qω
+1
n
• Second order filters can be designed as lowpass, highpass,
bandpass, or notch filters
• All four types can be expressed in standard form shown above
• N (s) is a polynomial in s of degree m ≤ 2
– If N (s) = k, the system is a lowpass filter with a DC gain of k
s2
k ω2 ,
n
– If N (s) =
the system is a highpass filter with a high
frequency gain of k
s
– If N (s) = k Qω
, the system is a bandpass filter with a
n
maximum gain of k
2
– If N (s) = k 1 − ωs 2 , the system is a notch filter with a gain
n
of k
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
4
Unity Gain Lowpass
A unity-gain lowpass second-order transfer function is of the form
ωn2
H(s) = 2
=
2
s + 2ζωn s + ωn
1
1+
2ζ ωsn
+
• ωn is called the undamped natural frequency
s
ωn
2
• ζ (zeta) is called the damping ratio
p
• The poles are p1,2 = (−ζ ± ζ 2 − 1) ωn
• If ζ ≥ 1, the poles are real
• If 0 < ζ < 1, the poles are complex
• If ζ = 0, the poles are imaginary: p1,2 = ±jωn
• If ζ < 0, the poles are in the right half plane (Re{p} > 0) and the
system is unstable
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
5
Unity Gain Lowpass Continued
The transfer function H(s) can also be expressed in the following form
H(s) =
1
1 + 2ζ ωsn +
where
s
ωn
2 =
1
1+
s
Qωn
+
s
ωn
2
1
2ζ
The meaning of Q, the Quality factor, will become clear in the
following slides.
1
H(jω) =
2
jω
1 − ωωn + Qω
n
Q,
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
6
Unity Gain Lowpass Magnitude Response
20 log10 |H(jω)| = 20 log10 1 −
= −20 log10
s
ω
ωn
2
ω2
1− 2
ωn
+
jω
Qωn
2
+
−1
ω
Qωn
2
For ω ≪ ωn ,
20 log10 |H(jω)| ≈ −20 log10 |1| = 0 dB
For ω ≫ ωn ,
20 log10 |H(jω)| ≈ −20 log10
ω
ω2
= −40 log10
dB
ωn2
ωn
At these extremes, the behavior is identical to two real poles.
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
7
Lowpass Magnitude Continued
s
2 2
ω
ω2
20 log10 |H(jω)| = −20 log10
1− 2
+
ωn
Qωn
For ω = ωn ,
20 log10 |H(jωn )| = −20 log10
J. McNames
Portland State University
1
= 20 log10 Q = QdB
Q
ECE 222
Second Order Filters
Ver. 1.04
8
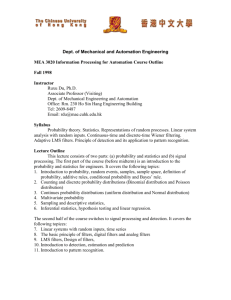
Lowpass Magnitude
Complex Poles
40
Q=0.100
Q=0.500
Q=0.707
Q=1.000
Q=2.000
Q=10.000
Q=100.000
Mag (dB)
20
0
−20
−40
−60
−2
10
J. McNames
10
−1
0
10
Frequency (rad/sec)
Portland State University
ECE 222
1
2
10
10
Second Order Filters
Ver. 1.04
9
Matlab Code
function [] = B o d e C o m p l ex Po les ();
N = 1000;
wn = 1;
Q = [0 .1 0 .5 sqrt (1/2) 1 2 10 100];
w = logspace ( -2 ,2 , N );
nQ = length ( Q );
mag = [];
phs = [];
legendLabels = cell ( nQ ,1);
for c1 = 1: nQ
sys = tf ([ wn ^2] ,[1 wn / Q( c1 ) wn ^2]);
[m , p ] = bode ( sys , w );
mag = [ mag reshape (m ,N ,1)];
phs = [ phs reshape (p ,N ,1)];
legendLabels { c1 } = sprintf ( ’Q =%5 .3f ’,Q ( c1 ));
end
figure (1);
FigureSet (1 , ’ Slides ’ );
h = semilogx (w ,20* log10 ( mag ));
set (h , ’ LineWidth ’ ,1 .5 );
grid on ;
xlabel ( ’ Frequency ( rad / sec ) ’ );
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
10
ylabel ( ’ Mag ( dB ) ’ );
title ( ’ Complex Poles ’ );
xlim ([ w (1) w ( end )]);
ylim ([ -60 45]);
box off ;
AxisSet (8);
legend ( legendLabels );
print ( ’ B o d e M a g C o m p lex Po le s’ , ’ - depsc ’ );
figure (2);
FigureSet (2 , ’ Slides ’ );
h = semilogx (w , phs );
set (h , ’ LineWidth ’ ,1 .5 );
grid on ;
xlabel ( ’ Frequency ( rad / sec ) ’ );
ylabel ( ’ Phase ( deg ) ’ );
title ( ’ Complex Poles ’ );
xlim ([ w (1) w ( end )]);
ylim ([ -190 10]);
box off ;
AxisSet (8);
legend ( legendLabels );
print ( ’ B o d e P h a s e C o m pl exP ol es ’ , ’- depsc ’ );
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
11
Lowpass Phase
∠H(jω)
= ∠
1−
For ω ≪ ωn ,
ω
ωn
1
2
+
jω
Qωn
∠H(jω) ≈ ∠1 = 0◦
For ω ≫ ωn ,
∠H(jω) ≈ ∠
1
ω
− Qω
n
=∠−
Qωn
= ∠ − 1 = −180◦
ω
For ω = ωn ,
∠H(jω) ≈ ∠
1
1
= ∠ = ∠ − j = −90◦
Qj
j
At the extremes, the behavior is identical to two real poles. At other
values of ω near ωn , the behavior is more complicated.
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
12
Unity Gain Lowpass Phase
Complex Poles
0
Q=0.100
Q=0.500
Q=0.707
Q=1.000
Q=2.000
Q=10.000
Q=100.000
−20
Phase (deg)
−40
−60
−80
−100
−120
−140
−160
−180
10
J. McNames
−2
−1
10
Portland State University
0
10
Frequency (rad/sec)
ECE 222
10
1
Second Order Filters
2
10
Ver. 1.04
13
Lowpass Comments
H(jω) =
1+
jω
Qωn
1
+
jω
ωn
2
• The second-order response attenuates twice as fast as a first-order
response (40 dB/decade)
• Generally better than the cascade of two first-order filters
• Offers additional degree of freedom (Q), which is the gain near
ω = ωn
• Q may range from 0.5 to 100
• Is usually near Q = 1
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
14
Lowpass Maximum Magnitude
What is the frequency at which |H(jω)| is maximized?
H(jω) =
1+
jω
Qωn
1
+
jω
ωn
2
|H(jω)| = r
1−
ω2
2
ωn
• For high values of Q, the maximum of |H(jω)| > 1
• This is called peaking
• The largest Q before the onset of peaking is Q =
1
2
√1
2
+
ω
Qωn
2
≈ 0.707
– Said to be maximally flat
– Also called a Butterworth response
– In this case, |H(jωn )| = −3 dB and ωn is the cutoff frequency
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
15
Lowpass Maximum Continued
If Q > 0.707, the maximum magnitude and frequency are as follows:
r
1
Q
ωr = ωn 1 −
|H(jω
)|
=
r
1
2Q2
1 − 4Q
2
• ωr is called the resonant frequency or the damped natural
frequency
• As Q → ∞, ωr → ωn
• For sufficiently large Q (say Q > 5)
– ωr ≈ ωn
– |H(jωr )| ≈ Q
• Peaked responses are useful in the synthesis of high-order filters
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
16
Example 1: Passive Lowpass
50 mH
R
+
vs(t)
200 nF
vo(t)
-
Generate the bode plot for the circuit shown above.
H(s) =
J. McNames
s2 +
1
LC
R
1
L s + LC
ωn2
ωn2
= 2 ωn
= 2
s + 2ζωn s + ωn2
s + Q s + ωn2
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
17
Example 1:Passive Lowpass Continued
ωn
=
ζ
=
Q =
r
1
= 10 k rad/s
LC
R√
R√
LC =
CL = R × 0.001
2L
2
r
1 L
L 1
500
√
=
=
CR
R
LC R
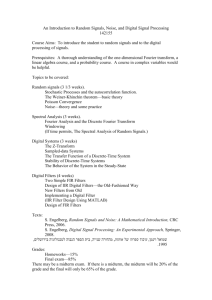
R=5Ω
ζ = 0.005
Q = 100
Very Light Damping
R = 50 Ω
R = 707 Ω
ζ = 0.05
ζ = 1.41
Q = 10
Q = 0.707
Light Damping
Strong Damping
R = 1 kΩ
ζ=1
Q = 0.5
Critical Damping
R = 5 kΩ
ζ=5
Q = 0.1
Over Damping
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
18
Example 1: Lowpass Magnitude Response
Resonance Example
40
20
Mag (dB)
0
−20
−40
R=5Ω
R = 50 Ω
R = 707 Ω
R = 1 kΩ
R = 5 kΩ
R = 50 kΩ
−60
−80
−100
−120
2
10
J. McNames
10
3
Portland State University
4
10
Frequency (rad/sec)
ECE 222
10
5
Second Order Filters
6
10
Ver. 1.04
19
Example 1: Lowpass Phase Response
Resonance Example
0
−20
Phase (deg)
−40
−60
−80
R=5Ω
R = 50 Ω
R = 707 Ω
R = 1 kΩ
R = 5 kΩ
R = 50 kΩ
−100
−120
−140
−160
−180
2
10
J. McNames
10
3
Portland State University
4
10
Frequency (rad/sec)
ECE 222
10
5
Second Order Filters
6
10
Ver. 1.04
20
Practical Second-Order Filter Tradeoffs
• There are many standard designs for second-order filters
• A library of first and second-order filters is all you need to
synthesize any transfer function
• The ideal transfer functions are identical
• Engineering design tradeoffs are practical
– Cost (number of op amps)
– Complexity
– Sensitivity to component value variation
– Ease of tuning
– Ability to vary cutoff frequencies and/or gains
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
21
Practical Second-Order Filters
• Popular practical second-order filters include
– KRC/Sallen-key filters
– Multiple-feedback filters: more than one feedback path
– State-variable filters
– Biquad/Tow-Thomas filters filters
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
22
Example 2: Lowpass Sallen-Key Filter
C1
R1
R2
+
vs(t)
Rb
C2
vo(t)
-
Ra
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
23
Example 2: Questions
• Is the input impedance finite?
• What is the output impedance?
• How many capacitors are in the circuit?
• What is the DC gain?
• What is the “high frequency” gain?
• What is the probable order of the transfer function?
• Solve for the transfer function
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
24
Example 2: Work Space
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
25
Example 2: Work Space
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
26
Example 2: Tuning
Ra + Rb
=k
Ra
1
ωn = √
R1 C1 R2 C2
|H(0)| =
Q= q
1
R2 C2
R1 C1
+
q
R1 C2
R2 C1
+ (1 − k)
q
R1 C1
R2 C2
• 6 circuit parameters (four resistors, two capacitors)
• 3 constraints
– DC gain, k
– Natural frequency
– Q
• Prudent to pick K = 1, since gain is often added at in the first
and/or last stages
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
27
Example 2: Tuning Tips
RA + RB
|H(0)| =
RA
1
ωn = √
R1 C1 R2 C2
Q= q
1
R2 C2
R1 C1
+
q
R1 C2
R2 C1
+ (1 − K)
q
R1 C1
R2 C2
1. If you select R1 = R2 = R and C1 = C2 = C, the equations
simplify considerably
• Watch out for coarse tolerances on components
2. Helps guard against op amp limitations if you select k = 1
• Gain is often used at end or beginning of filter stages
3. Best to start of with two capacitances in a ratio
J. McNames
Portland State University
ECE 222
C1
C2
≥ 4Q2
Second Order Filters
Ver. 1.04
28
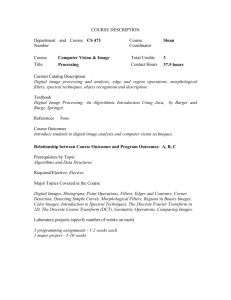
Example 3: Design
√
Design a Sallen-Key lowpass filter with a Q = 1/ 2, corner
frequency of 1000 Hz, and DC gain of 1.
• Redraw the circuit with a DC gain of 1
• Arbitrarily pick C2 = 1 nF, a common capacitor value that is
cheaply and readily available
2
Hint: Recall that the solution to ax + bx + c = 0 is x =
J. McNames
Portland State University
ECE 222
√
−b± b2 −4ac
2a
Second Order Filters
Ver. 1.04
29
Example 3: DC Gain Solution
RB
RA + RB
=1+
|H(0)| =
RA
RA
Pick RB = 0 and RA = ∞
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
30
Example 3: Solution
Define R1 = mR2 and C1 = nC2
1
ωn = √
R1 C1 R2 C2
1
√
=
R2 C2 nm
Q= q
= q
√
1
R2 C2
R1 C1
1
1
mn
mn
=
1+m
J. McNames
+
+
q
pm
Portland State University
R1 C2
R2 C1
+ (1 − K)
√
mn
√
mn
q
R1 C1
R2 C2
n
ECE 222
Second Order Filters
Ver. 1.04
31
Example 3: Solution
mn
Q =
1 + 2m + m2
mn
2
m + 2m + 1 = 2
Q
1
mn
1 2
m +m+ =
2
2
2Q2
1 2
mn
1
m + 1−
m+ =0
2
2Q2
2
n
−1
β,
2
2Q
1 2
1
m − βm + = 0
2
2
am2 + bm + c = 0
√
p
−b ± b2 − 4ac
= β + β2 − 1
m=
2a
2
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
32
Example 3: Solution
1. Arbitrarily pick C2 = 10 nF, a common capacitor value that is
cheaply and readily available
2
1
2. Select n such that C
≥
4Q
, to ensure solution to quadratic
C2
1
equation for m = R
R2 is real valued
• Pick n = 8
• Then C1 = 8Q2 C2 = 80 nF
p
3. Solve for m = β + β 2 − 1, given β =
• m=1
4. Solve for R2 =
n
2Q2
−1
1√
C2 ωn nm
• R2 = 2.33 kΩ
5. Solve for R1 = mR2 , given m and R2
• R1 = 13.6 kΩ
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
33
Example 3: Magnitude Response
Complex Poles
20
10
Mag (dB)
0
−10
−20
−30
−40
−50
−60
2
10
10
3
4
10
10
5
Frequency (rad/sec)
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
34
Example 3: Phase Response
Complex Poles
0
−20
Phase (deg)
−40
−60
−80
−100
−120
−140
−160
−180
2
10
3
10
10
4
5
10
Frequency (rad/sec)
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
35
Example 3: MATLAB Code
function [] = S a l l e n K e y Lo wp ass ();
RA
RB
C2
Q
fn
=
=
=
=
=
inf ;
0;
10e -9;
1;
1000;
% = = = = = = = = = = = = = = = = = = = = = = = == = = == = = == = == = = == = = == = = == = = = = = == = = =
% Preprocessing
% = = = = = = = = = = = = = = = = = = = = = = = == = = == = = == = == = = == = = == = = == = = = = = == = = =
dCGain = 1 + RB / RA ;
wn
= 2* pi * fn ;
n
= 8* Q ^2;
b
= n /(2* Q ^2) -1;
m
= b + sqrt ( b ^2 -1);
C1
= n* C2 ;
R2
= 1/( wn * C2 * sqrt ( n * m ));
R1
= m* R2 ;
fprintf ( ’ C1 :
fprintf ( ’ C2 :
fprintf ( ’ R1 :
fprintf ( ’ R2 :
%5 .3f
%5 .3f
%5 .3f
%5 .3f
nF \n ’ , C1 *1 e9 );
nF \n ’ , C2 *1 e9 );
kOhms \ n ’ , R1 *1e -3);
kOhms \ n ’ , R2 *1e -3);
N = 1000;
functionName = sprintf ( ’% s ’ , mfilename );
J. McNames
Portland State University
% Get the function name
ECE 222
Second Order Filters
Ver. 1.04
36
w = logspace (2 ,5 , N );
mag = [];
phs = [];
f i l e I d e n tif ier = fopen ([ functionName ’ .tex ’] , ’w ’ );
sys = tf ([ dCGain ] ,[1/( wn ^2) 1/( wn * Q ) 1]);
[m , p ] = bode ( sys , w );
bodeMagnitude = reshape (m ,N ,1);
bodePhase
= reshape (p ,N ,1);
figure (1);
FigureSet (1 , ’ Slides ’ );
h = semilogx (w ,20* log10 ( bodeMagnitude ) , ’r ’ );
set (h , ’ LineWidth ’ ,1 .5 );
grid on ;
xlabel ( ’ Frequency ( rad / sec ) ’ );
ylabel ( ’ Mag ( dB ) ’ );
title ( ’ Complex Poles ’ );
xlim ([ w (1) w ( end )]);
ylim ([ -60 20]);
box off ;
AxisSet (8);
fileName = sprintf ( ’%s - Magnitude ’ , functionName );
print ( fileName , ’ - depsc ’ );
fprintf ( fileIdentifier , ’ % % = = = = = = = = = = = = = = = = = = = = = = = = = = = == = = = == = = == = = = == = = == = = = == = = == = = = == = = == = = == = = = == = = == \n ’
fprintf ( fileIdentifier , ’ \\ newslide \ n ’ );
fprintf ( fileIdentifier , ’ \\ slideheading { Example \\ arabic { exc }: Magnitude Respo nse }\ n ’);
fprintf ( fileIdentifier , ’ % % = = = = = = = = = = = = = = = = = = = = = = = = = = = == = = = == = = == = = = == = = == = = = == = = == = = = == = = == = = == = = = == = = == \n ’
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
37
fprintf ( fileIdentifier , ’ \\ i n c l u d e g ra phi cs[ scale =1]{ Matlab /% s }\ n ’ , fileName );
figure (2);
FigureSet (2 , ’ Slides ’ );
h = semilogx (w , bodePhase , ’r ’ );
set (h , ’ LineWidth ’ ,1 .5 );
grid on ;
xlabel ( ’ Frequency ( rad / sec ) ’ );
ylabel ( ’ Phase ( deg ) ’ );
title ( ’ Complex Poles ’ );
xlim ([ w (1) w ( end )]);
ylim ([ -190 10]);
box off ;
AxisSet (8);
fileName = sprintf ( ’%s - Phase ’ , functionName );
print ( fileName , ’ - depsc ’ );
fprintf ( fileIdentifier , ’ % % = = = = = = = = = = = = = = = = = = = = = = = = = = = == = = = == = = == = = = == = = == = = = == = = == = = = == = = == = = == = = = == = = == \n ’
fprintf ( fileIdentifier , ’ \\ newslide \ n ’ );
fprintf ( fileIdentifier , ’ \\ slideheading { Example \\ arabic { exc }: Phase Response }\ n ’ );
fprintf ( fileIdentifier , ’ % % = = = = = = = = = = = = = = = = = = = = = = = = = = = == = = = == = = == = = = == = = == = = = == = = == = = = == = = == = = == = = = == = = == \n ’
fprintf ( fileIdentifier , ’ \\ i n c l u d e g ra phi cs[ scale =1]{ Matlab /% s }\ n ’ , fileName );
fprintf ( fileIdentifier , ’ % % = = = = = = = = = = = = = = = = = = = = = = = = = = = == = = = == = = == = = = == = = == = = = == = = == = = = == = = == = = == = = = == = = == \n ’
fprintf ( fileIdentifier , ’ \\ newslide \ n ’ );
fprintf ( fileIdentifier , ’ \\ slideheading { Example \\ arabic { exc }: MATLAB Code }\ n ’ );
fprintf ( fileIdentifier , ’ % % = = = = = = = = = = = = = = = = = = = = = = = = = = = == = = = == = = == = = = == = = == = = = == = = == = = = == = = == = = == = = = == = = == \n ’
fprintf ( fileIdentifier , ’\ t \\ matlabcode { Matlab /% s.m }\ n ’ , functionName );
fclose ( f i l e I d e n tif ier );
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
38
Example 4: Highpass Sallen-Key Filter
R1
C1
C2
+
vs(t)
Rb
R2
vo(t)
-
Ra
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
39
Example 4: Questions
• Is the input impedance finite?
• What is the output impedance?
• How many capacitors are in the circuit?
• What is the DC gain?
• What is the “high frequency” gain?
• What is the probable order of the transfer function?
• Solve for the transfer function
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
40
Example 4: Work Space
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
41
Example 4: Work Space
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
42
Example 4: Solution
H(s) = K
1+
s
ωn
s
Qωn
2
+
RB
K =1+
RA
1
ωn = √
R1 C1 R2 C2
Q= q
J. McNames
s
ωn
2
1
R1 C1
R2 C2
+
Portland State University
q
R1 C2
R2 C1
+ (1 − K)
ECE 222
q
R2 C2
R1 C1
Second Order Filters
Ver. 1.04
43
Example 5: Bandpass Sallen-Key Filter
R3
C2
R1
+
vs(t)
C1
Rb
R2
vo(t)
-
Ra
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
44
Example 5: Questions
• Is the input impedance finite?
• What is the output impedance?
• How many capacitors are in the circuit?
• What is the DC gain?
• What is the “high frequency” gain?
• What is the probable order of the transfer function?
• Solve for the transfer function
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
45
Example 5: Work Space
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
46
Example 5: Work Space
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
47
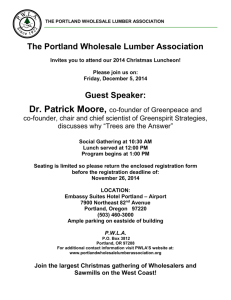
Transfer Function Synthesis
You can build almost any transfer function with integrators, adders, &
subtractors
N (s)
X(s)
Y (s) = H(s)X(s) =
X(s) =
N (s) = U (s)N (s)
D(s)
D(s)
where
U (s) ,
1
X(s)
D(s)
D(s) , bn sn + bn−1 sn−1 + · · · + b1 s + b0
X(s) = bn sn U (s) + bn−1 sn−1 U (s) + · · · + b1 sU (s) + b0 U (s)
1
n−1
n
X(s) − bn−1 s
U (s) − · · · − b1 sU (s) − b0 U (s)
s U (s) =
bn
Y (s) = U (s)N (s)
= an sn U (s) + an−1 sn−1 U (s) + · · · + a1 sU (s) + a0 U (s)
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
48
Transfer Function Synthesis Diagram
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
49
Transfer Function Synthesis Clean Diagram
an
x(t)
+
1
bn
Σ
Σ
Σ
Σ
Σ
an−1
a2
a1
a0
1
s
1
s
y(t)
1
s
Σ
bn−1
Σ
b2
Σ
b1
b0
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
50
Example 6: Transfer Function Synthesis
Draw the block diagram for the following transfer function:
s3 + 5s2 + 2
H(s) = 4
s + 17s3 + 82s2 + 130s + 100
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
51
Analog Filters Summary
• There are many types of filters
• Second-order filters can implement the four basic types
– Second-order
– Lowpass & Highpass
– Bandpass & Bandstop
– Notch
• For a given H(s), there are many implementations & tradeoffs
• Second order filters are fundamentally different than first-order
filters because they can have complex poles
– Causes a resonance
J. McNames
Portland State University
ECE 222
Second Order Filters
Ver. 1.04
52