production-possibility frontier with variable returns to scale. a
advertisement

PRODUCTION-POSSIBILITY FRONTIER
WITH VARIABLE
RETURNS TO SCALE. A GENERAL RESULT∗
By Jules GAZON†
February 28, 2003
Abstract
Even if, for over four decades, substantial progress has been made
for determining the Production-Possibility Frontier (PPF ) shape, when
returns to scale are increasing or variable, the interest of the PPF curvature and its calculation have been intermittent and limited to homogeneous or homothetic production functions: Herberg (1969 and
2000), Herberg and Kemp (1969). We decompose the local curvature
into the effect of returns to scale and the effect of inputs intensities
from production functions, which are not necessarily homothetic or
homogeneous, but which exhibit variable returns to scale. The effect
of returns operates in the sense of previous results. But, while the
economic literature generally waits for input intensities difference to
make PPF concave to origin returns effect apart, we show that this
is not necessarily the case if the relative variation of partial returns is
different for at least one production unit.
Keywords: Production-Possibility Frontier, Returns to scale, Efficient Allocation of Resources.
Increasing returns are an essential characteristic of the economic world.
The present technological revolution based on data processing and telecommunications increasingly implies internal and external economies of scales in
∗
I am grateful to Jacques Bair, professor at the University of Liège (Belgium), Horst
Herberg, professor at Christian Albrechts University at Kiel (Germany) and Murray C.
Kemp, professor at the University of New South Wales (Australia) for their very helpful
comments that enable me to improve a first version of this article. The usual caveat
applies.
†
Université de Liège, Economie Internationale, Boulevard du Rectorat, 7 (B31) - B
- 4000 — LIEGE (Belgium) - Tél. + 32(0)43663121 - Fax : + 32(0)43663120 - e-mail:
jgazon@ulg.ac.be, Université Paris 1 (Sorbonne), Centre de Recherche Crifes-Matisse.
1
both production process and production organization. Traditional use and
powerful results of convex analysis in economic theory show that our understanding of increasing returns to scale is far from complete. The problem
comes from production side, and especially from the Production-Possibility
Frontier ( P P F ) shape. As P P F is the frontier of the output set, it would
have to concern production theory. But this latter generally limits its analysis to returns to scale as the output set variation due to equiproportional
inputs variation, when P P F results from a Pareto-efficient sharing of limited inputs between all production units. Therefore it concerns all problems
dealing with an efficient allocation of limited resources as the production
side of general equilibrium theory and its implications, international trade
theory, having the most studied, but intermittently, P P F shape with regard to returns to scale. Given the possible non-existence of a competitive
equilibrium when there are increasing returns, the theorists of general equilibrium are worried about this situation. As a result (see Heal, 1999), they
have made important theoretical progress in the three last decades in dealing with increasing returns to scale in order to find equilibria, which might
be efficient for types of pricing. It is not our scope to discuss the existence
or uniqueness of a general equilibrium, but rather to how important it is to
know PPF shape for determining these results. Seeking a direction process
to reach a Pareto-efficient allocation of resources, the non market approach
though a central planning board as proposed in the ”tâtonnement process”
(Arrow and Hurwicz, 1960), or in the algorithm of Cremer (1977) as in the
research of a saddle point of the Langangian by Heals (1984) based on the
result of Arrow, Gould and Howe (1977) directly concerns P P F shape. This
is also the case of the marginal pricing rule starting with Guesnerie, (1975),
and developed by Beato (1982) who have exhibited several equilibria on
P P F under the assumption that this later is smooth, while Cornet (1982)
supposed that it has no ”inward kinks”. But, as shown in Beato and MasColell (1985) if there is more than one firm producing the same commodity
and some have increasing returns, PPF exhibits ”inward kinks”. Furthermore, Bonnisseau and Cornet (1990) treated the existence of marginal cost
pricing equilibria in an economy with several nonconvex firms. A third approach, initiated by Dieker, Guesnerie and Neuefeind (1985) and developed
in Brown, Heal, Khan and Voha (1986), where non-convex producers fulfil
only the first order Kuhn-Tucker necessary conditions, adopts price setting
behaviors to follow different rules like, profit maximizing, average cost pricing, bounded losses; for this later pricing, it is necessary and sufficient that
the production set be star-shaped (Bonnisseau and Cornet, 1988).
It appears that, with the useful and realistic assumption of convex con2
sumer behaviors, non convexity of output set caused by increasing returns
is always at the origin of problems to define an efficient general equilibrium, which must be a tangency point between the pricing hyperplane and
the P P F , even if certain pricing rules proposed equilibria where production efficiency fails. This paper doesn’t treat general equilibrium, but we
believe that our results, linking local curvature of PPF, notably to returns
to scale, should help to improve the knowledge of the existence, uniqueness
and stability of equilibrium.
International trade theorists, often in a different way than general equilibrium theorists, have shown that the P P F shape resulting from increasing
returns might imply the non-uniqueness of equilibrium for international competitive economies as demonstrated, for imperfect competition and economies
of scale, by Venables (1984), Kehoe (1985) and Kemp and Schweinberger
(1991), confirmed by several applications as this of Mercenier (1995). Obviously, the multiplicity and the stability of the equilibria always depend on
convexity, concavity and the existence of saddle points of PPF.
It is also these economists who have studied the influence of returns to
scale nature on the P P F shape the most. Savosnick’s technique (1958) is
an important reference for deriving P P F with two production units, which
uses two inputs for producing two outputs. The use by Savosnick of the
Edgeworth box showing that not only returns to scale are determinant for
P P F shape, but also the difference in input intensities, interested theoreticians of international trade. But the limitation of geometric technique,
especially when Savosnik introduces increasing returns, needed a more rigorous demonstration. This was done by Johnson (1966), Quirk and Saposnik
(1966), Lancaster (1968, pp 127-134), Melvin (1968) and Kelly (1969). But
above all, is the article of Herberg (1969), which has established definitive results in the case 2x2 for homogeneous production functions, showing
that the PPF shape interpretation of this time was often false in economic
literature. Herberg (2000) generalizes these results for any finite number
of production units and any number of production factors in the case of
homothetic production functions. Mayer (1974) provided sufficient conditions for the local concavity to origin where production functions are only
quasi-concave but with other hypotheses. Furthermore Herberg and Kemp
(1969) have demonstrated a decisive result for external variable returns to
the firm but internal to industry through homothetic production functions,
each firm producing one commodity with constant internal returns. They
determine P P F shape in the neighborhood of the axis, when the production of one production unit tends to zero, the resources being nearly full
allowed to other production units and conclude that, if for output value
3
near zero, one good is produced under condition of increasing (decreasing)
returns to scale, then in the neighborhood of zero output, P P F is strictly
convex (concave) to origin and this, whatever the nature of returns to scale
in the other industry. Answering to Markusen and Melvin (1984) who estimate that this result is inapplicable in context of specific factors, Herberg
and Kemp (1991) show that if there are two or more mobile factors, their
proposition is valid whether or not there are industry-specific factors. But
Wong (1996) showed that the Herberg-Kemp’s proposition does not depend
on the number of mobile factors and is more general than they have realized. Panagariya (1981) demonstrated that, with one unique production
factor, two commodities and homogeneous production functions, P P F has
only one inflection point. When there are several factors, there may have
to be more than one point of inflection. During the seventies, for homogeneous and linear production functions, several trade theorists completed
the task of specifying necessary and sufficient conditions for a single-country
and world P P F to be locally of any assigned degree of flatness. First in the
case of non-joint-product technology, see: Khang and Uekawa (1973) with
the presence of intermediary goods and the generalisation of Kemp, Khang
and Uekawa (1978) who demonstrate that the P P F , with endowment of n
primary-factor inputs, contains an (n − r) dimensional flat if and only if
there are r linearly independent vectors of primary-factor inputs. Second,
Kemp, Manning, Nishimura and Tawada (1980) derive the result under conditions of joint production. Furthermore, still in trade theory, it has long
been recognized that when the number of commodities exceeds the number
of production factors, P P F is not strictly convex to origin. Kemp, Manning,
et al. (1980), using a result of Melvin (1968) based on the degree of linearly
independent vectors of primary factors, generalize this result to show that
P P F contains ”flats” when there are more commodities than primary factors in a world of constant returns to scale. Finally, Manning and Melvin
(1992) have shown that any arbitrary concave, negatively sloped P P F can
be generated by a pair of linearly homogeneous quasi-concave productions
functions given fixed total endowment of two factors.
Even if the previous results are not always based on the same assumptions, they give a global description of P P F shape with regard to returns to
scale showing that it depends on two forces: in this literature the non linearity of input vectors plays in favor of a P P F concave to origin, while the
returns to scale operates in the same direction if they are decreasing and to
the opposite direction if they are increasing; with constant returns to scale
P P F is flat if and only if input vectors are linearly dependant which means
that, with two primary inputs, P P F is a straight line because of identical
4
input intensities.
This literature limits the analysis to homogeneous or homothetic production functions, which is very restrictive when one wants to take into
account the variation of returns. The purpose of the present article is to fill
this gap through a general result. We think that the sporadic interest for
P P F in economic literature, which has implied no decisive references during
the recent years, except Herberg (2000) and Wong (1996), doesn’t justify
the abandoning of research, given its importance for efficient allocation of
resources.
In section 1 we define concepts, assumptions and notation for production technology and production functions with only primary inputs in order
to induce P P F from the efficient allocation of inputs. A production-unit
produces only one output, the multi-input - multi-output relation with fixed
endowment of inputs is only based on technology without consideration of
market pricing. The production functions follow the usual basic hypothesis;
they are quasi-concave, twice differentiable but neither necessarily homogeneous nor homothetic. The general curvature problem of P P F is posed in
section 2 through the Hessian matrix integrating the second order condition of optimisation. Section 3, using vectorial analysis for two production
units with two inputs, gives the general result of the curvature of P P F at
the neighborhood of axis (Theorem 1) and for any locus of the definition domain (Theorem 2). It not only confirms the actions of both above-mentioned
forces, but also gives a general formulation that specifies calculation of P P F
local curvature. The local effects of variable returns to scale are clearly
isolated, while the input intensities effect is decomposed: first, into the input intensities difference effect,which jointly acts with the marginal rate
of substitution relative variation on input frontier (IF ) and the secondly,
partial returns ratios of inputs relative variation effect. This general result
clarifies the Hessian matrix elements, which allows the generalisation for
multi-outputs, multi-inputs production economy.
Section 4 confronts our general result to main results on PPF in economic
literature, (i) the situation when inputs tend to be devoted to only one
activity, which generalises the result of Herberg and Kemp (Theorem 1), (ii)
the non variable returns case, which corresponds to homogeneous production
function and the case where productions functions are homothetic confirm
the Herberg (1969 and 2000)’s statements (Theorem 3).
5
1
Production technology and
Production-Possibility Frontier
1.1
Production technology
Let producers use inputs {1, ..., N} in quantities such as x = (x1 , ..., xN ) ∈
N to produce different outputs y = (y , ..., y ) ∈ RM , R = [0, ∞[ and
R+
1
M
+
+
where {1, ..., M} are the M production-units.
The technology set consists of all feasible input-output vectors: T =
{(x, y) : x can
correspondence is: y −→ L (y) ⊆
© produce y} . The input
ª
N , L (y) = x ∈ RN : (x, y) ∈ T where set L (y) is the input set: it conR+
+
sists of all input vectors x that can produce output
vectors y. Theªoutput
©
M : (x, y) ∈ T where
,
P
(x)
=
y
∈
R
correspondence is: x → P (x) ⊆ RM
+
+
set P (x) is called the output set: it contains all output vectors which can
be produced by input vectors x. As a consequence, we have the following
equivalent relations: (x, y) ∈ T ⇐⇒ y ∈ P (x) ⇐⇒ x ∈ L (y).
The input and output correspondences satisfy the following assumptions:
A.1. P (0) = {0} (inactivity),
A.2. If y ≥ 0 (y 6= 0), y 6= P (0), (no free lunch),
N (scarcity),
A.3. P (x) is bounded for each x ∈ R+
A.4. P (x) is closed,
A.5. L (y) is closed and convex,
A.6. P (resp. L) is continuous at x (resp. y),
A.7. If y ∈ P (x), x ≤ x0 ⇐⇒ y ∈ P (x0 ), (strong disposability of
inputs),
A.8. If y ∈ P (x), y ≥ y0 ⇐⇒∈ y0 ∈ P (x), (strong disposability of
outputs).
A.9. There are M production-units, one for each output {1, ..., M} .
This assumption allows avoiding ”inward kinks”on P P F which could
appear when several units produce the same output as shown in Beato and
Mas-Colell (1985).
Let’s define input-isoquant by:
IsoqL (y) = {x : x ∈ L (y.) , λ ∈ [0, 1[ =⇒ λx ∈
/ L (y)} , y ≥ (0) , y 6= (0) .
/ L(y), y ≥ 0(y 6=
A.10. If x ∈ IsoqL (y) then x0 ≤ x (x0 6= x) =⇒ x0 ∈
0): input vector x corresponds to a Pareto-efficiency allocation of inputs.
This means that a reduction in any input requires an increase in at least
one input to hold the same output y.
6
Furthermore, the output-isoquant is defined by:
IsoqP (x) = {y : y ∈ P (x) , θ ∈ ]1, ∞[ =⇒ θy ∈
/ P (x)} , x ≥ (0) , x 6= 0.
/ P (x), x ≥ 0, x 6= 0 : output
A.11. If y ∈ P (x), then y0 ≥ y =⇒ y0 ∈
vector y corresponds to a Pareto-efficiency distribution of outputs.
A.12. On an input-isoquant, one input might be continuously substituted
for another.
A.13. On an output-isoquant, one output might be continuously substituted for another.
A.14.: Technology is characterized by a fixed input endowment, x̄ =
N fully employed where ∀j ∈ {1, ..., N} , xi ∈ [0, x̄ ] ⊂ R1 , is
(x̄1 , ..., x̄N ) ⊂ R+
j
+
j
XM
i
x = x̄j (scarcity
the quantity of input j used to produce output i with
i=1 j
constraint).
Input endowment
considered as the set of full employment
in¸¾
½ could be
·X
XM j
M
and the
xi = x̄1 , ...,
x = x̄N
put vectors: x̄ = x : x =
i=1 1
i=1 N
n³− ´
³−´o
−
x, y : y ∈ P x .
corresponding full employment technology is T =
Scarcity constraint A.14. refers to the Edgeworth box for the input set
and implies that the inputs are mobile between production units but their
supply is completely inelastic.
Assumption A.14 doesn’t suppose that the inputs are necessarily essential. They are usable but it is possible that one production unit doesn’t use
all inputs. In this case, the inputs that are not used by some production
units are specific to the others. This is less restrictive than Herberg’s (1969,
2000) assumption. However, Herberg (2000) shows that his results don’t
need to have all input indispensable. His demonstration holds if there is at
least one input that is essential and there is at least one output for which all
inputs are essential. In the case 2x2 treated in section 3, assumption A.14
implies this situation.
−
Note that, even if x ∈ x is a full employment input vector, the entire
map of P (x) is not necessarily technologically efficient, as full employment of
inputs is not sufficient to reach an efficient output. Given input endowment
x̄, Production Possibility Frontier (PPF), whichn corresponds to the Paretoo
−
efficiency output set, is defined by: P P F = y : y ∈ IsoqP (x) , x ∈ x .
Similarly, Input Frontier (IF ), which corresponds to Pareto-efficiency allocation of inputs
and which is the contractocurve in Edgeworth box, is defined
n
−
as: IF = x : : x ∈ IsoqL (P (x)) , x ∈ x . Because the correspondences P
and L are continuous (A.6.) with strong disposability ( A.7, A.8), we have,
7
as demonstrated in R.W. Shephard (1970, pp 212-222):
(1)
L (IsoqP (x)) = IsoqL (P (x)) .
Consequently as it is well known, P P F is mapping Input frontier (IF ) and
reciprocally: T = {(x, y), x ∈IF , y ∈P P F } is an efficient technology. In
other words, to have an output vector included in P P F, it is necessary and
sufficient that the corresponding input vectors be included in IF.
Now let define
i, also called activity i, as an input-output vec¢
¡ i technology
= Ti , where the input vector is defined by
tor subset
x , ¢yi
¡
xi = xi1 , ..., xiN , xi ≤
¢ (< or =) and the output vector by: yi =
¡ i x̄
(0, ..., 0, yi , 0, ..., 0) ∈ P x .
i
Ti is efficient and from (1) one has:
¢¢ (P (x )),
¡ technology
¡ ¢¢
¡ If yi ¡∈ iIsoq
L IsoqP x = IsoqL P xi
1.2
Production functions
For the efficient technology Ti , component yi of the output
yi ∈
¡ vector
¢
N −→
IsoqP (xi ) may be considered as the production function yi xi : R+
1 , associated to activity i defined by:
R+
¡ ¢
©
ª
(2)
yi xi = max yi : xi ∈ L (yi ) , xi ≤ x̄
Note first ∀i = 1, ..., M , the following properties for any production
function:
P.1. yi (0) = 0 due to assumption A1.
i
i
i
P.2. If y(x
¡ i ¢) > 0, x ≥ 0i (x 6= 0) due to assumptions A.2 and A.12.
P.3. yi ³x ´is finite ∀x ≤ x̄ due to assumption A.3.
¡ ¢
0
0
P.4. yi xi ≥ yi xi if xi ≥ xi due to assumptions A.7 and A.8.
N h
i
Y
¡ i¢
−
0
0, xj because A.5 implies: ∀xi , xi ∈
P.5. yi x is quasi-concave on
N
Y
j=1
j=1
³
[0, xj ] , yi θxi + (1 − θ) xi
´
0
h ¡ ¢
³ 0 ´i
≥ min yi xi , yi xi
, ∀θ ∈ [0, 1] .
Introduce¡ now
¢ an additional assumption:
i
A.15. yi x , ∀i = 1, ..., M is twice continuously differentiable ∀xij , j =
N
Y
¡
¢
]0, x̄j [ ⊂ RN
1, ..., N y(xi ) ∈ C 2 on open input set:
+.
j=1
Hence, one has:
8
P.6. The isoquants of each production function are smooth surfaces.
¡ ¢
From P.3. and A.15, with essential inputs, we can infer that yi xi is an
increasing function on each input j, which is used. Therefore partial derivN
Y
N and due to P.3., ∂y (xi )/∂xi is
atives: ∂yi (xi )/∂xij > 0 on
]0, x̄j [ ⊂ R+
i
j
j=1
¡ ¢
finite. If one input k is not essential to increase yi xi ,then it is possible to
have ∂yi (xi )/∂xik = 0 at isolated points.
that assumption A.14. implies that each production function
¡ Notice
¢
yi xi depends on the production level of others and may be defined by
¡ ¢
¡ ¡ ¢
£ ¡ ¢¤
¡ M ¢¢ 1
M −1
1 , as follows: y xi = y y x1 , ..., y xi , ..., y
R+
.
−→ R+
i
i
1
i
M x
1.3
Production-Possibility Frontier (P P F )
From (1) a bijection links input frontier IF and output frontier P P F , which
means that: ∀x ∈ IF =⇒ P (x) = y ∈ P P F ⇐⇒ L (y) = x.
The P P F defined by the efficient technology may ¡be ¡also¢ defined ¡from¢¢
production functions. Consider the output vectors y = y1 x1 , ..., yM xM ∈
¡ ¡ 1¢
£ ¡ ¢¤
¡ ¢¢
M −1
M and the output set y
R+
..., yi xi , ..., yM xM ∈ R+
(i) = y1 x , ¡
¢
of all efficient output vector yk ∈ IsoqP xk , k 6= i.
Then y ∈ P P F if and only if y is defined by solution of the following
optimisation problem:
¡ ¢
objectif : max yi xi
³ ´
product. constr. : yk = yk xk , k = 1, ..., [i] , ..., M as defined in (2)
XM
full/empl. constr. :
xlj = x̄j , ∀j = 1, ..., N.
l=1
¡
¢
0
0
∈ y(i) , in order to have y0 = y10 , ..., yM
∈ P P F, the
In fact ∀y(i)
XM
¡
¢
¡
¢
xk where
production yi0 xi = max IsoqP xi with xi = x̄ −
k=1(k6=i)
¡
¢
¡
¢
¡
¢
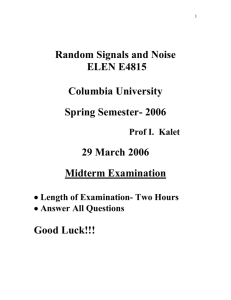
yk0 xk ∈ IsoqP xk ; consequently L y0 ∈ IF (see Figure 1 for N = 2,
M = 2).
If the solution of optimisation problem is y i , each production function
M −1
M
. As a consequence, P P F is defined in R+
y i defines P P F on y(i) ⊂ R+
as solution of the optimisation problem and we have:
XM
¢
©
¡
PPF = y = y 1 , ..., y M ∀j = 1, ..., N :
xij = x̄j }.
i=1
1
£
¡ ¢¤
¡ ¢
yi xi means that yi xi is excluded .
9
knowing that due to optimisation one has: ∇yi (xi ) =
XM
k6=i
µk ∇yk (xk )
N
where ∇yi (xi ), ∇yk (xk ) are the gradient vectors of yi (xi ) and yk (xk ) in R+
and µk ∈ R.
Therefore
P P F¢ might be defined as implicit joint production function in
¡
M : F y 1 , ..., yM = 0 or by any explicit production function y i : RM −1 −→
R+
+
1:
R+
¡
¢
£ ¤
(3)
yi = y i y1 , ..., y i , ..., y M .
Due to assumptions A.13, A.15. and relation (1), the reciprocal function
of y i : y i −→ xi exits and is twice continuously differentiable.
(yi )−1
02
B
y1
A
3
A’
max Isoq y10 ((x
x1)
1
IF
2
Isoq y10(x1)
0
01
B’
y
PPF
0 = y0
2
(1 )
( ()
2:L(Isoq y02 (x2)
3: L (max Isoq y10 (x1 ) with x1 = x = x2
y2
B'= P(B)∉Isoq P(x )
1: L Isoq y10 x1
A' = P(A)∈ Isoq P(x )
Figure 1
Efficiency correspondence between Edgeworth box and output set
2
General curvature of
Production-Possibility Frontier
We will determine P P F shape on the basis of the explicit equation 3 conM −1
,
sidering, without losing generality, that y 1 describes P P F on y(1) ⊂ R+
¡
¢
1
1
2
M
equation 3 is rewritten by: y = y y , ..., y .
Studies on function concavity or convexity usually postulate that the definition domain is convex. This is inappropriate for studying concavity of y 1
10
because to maintain the generality of analysis, supposing that the definition
M −1
of y 1 is convex could imply concavity properties of
domain y(1) ⊂ R+
production functions: y 2 , ..., y M , and consequently would destroy the main
aim of our analysis because for its generality, it is necessary that the functions y2 , ..., y M have no more restrictions than y 1 on the nature of their
curvature. They only respect, as y 1 , the property of quasi-concavity. But
then, from our assumptions and properties of production functions, we have
no guarantee on the y(1) convexity.
We need a criterion of P P F concavity or convexity defined by y1 on
M −1
, which is not necessarily convex. Let us define local
the set y(1) ⊂ R+
concavity:
M −1
is locally concave at y ∈
Definition 1: y 1 defined on y(1) ⊂ R+
M
P P F ⊂ R+ where L (y) ⊂ IF if and only if, the subset in the neighborhood
of y : N (y) = {y0 ∈ P (x0 ) : ky0 − yk < ε} is convex.
In fact N (y) is the set under the P P F in the neighborhood of y.
With the above definition, local concavity may be approached by generalization of second derivative test of the y 1 through the Hessian H:
1
· · · 2M y 1
22 y
..
..
H = ...
.
.
1
· · · M M y1
M 2y
where
ij y
1
= ∂ 2 y 1 /∂y i ∂y j (i, j = 2, ..., M) .
Instead of using the borded Hessian built from the production function yi (xi )
as is usual for an optimisation problem under constraints, in order to determine local concavity or convexity of P P F, defined by y 1 , we propose to
integrate in each second derivative of yi (xi ), i = 1, ..., M, the results coming from the fixed endowment of inputs and from the efficient constraint.
Then it is possible to determine each ij y 1 , , i, j = 2, ..., M. As said before,
∂yi (xi )/∂xij > 0 if input xij is essential to activity i. If input xij is not
essential to i , it is possible to have ∂yi (xi )/∂xij = 0.
Hence, name the essential
input set ( the Edgeworth box except
n
o the
i
sides):ixh ⊂ x as: ixh = x ∈x : xj > 0, ∀i = 1, ..., M ; ∀j = 1, ..., N, .
Then ∀x ∈ ix̄h, the constraints are:
XM
xik
(i) ∀i = 1, ..., M; ∀j = 1, ..., N : xij = xj −
k=2
(ii) ∇y1 (xi ) =
XM
k=2 µk
x∈ixh
∇yk (xk )
11
The constraint (ii) of efficient allocation of inputs means that the gradients of each production function are co-linear ∀x ∈ ixh. In other words, they
are perpendicular
¡ i ¢ to the hyperplane that is tangent at x ∈ IF, ∀y ∈ P P F
/ ixh , it is possible that constraint (ii) doesn’t hold.
to all IsoqL y . If x ∈
We will treat this case in the next section.
Consequently, the function y 1 defined on y(1) is locally concave (convex)
on P (x) ∈ P P F if and only if the Hessian H is semi-negative (semi-positive)
defined. It has a saddle point if H is undefined.
The general relation between variable returns to scale and output shape
is therefore determined from Hessian H, where second derivatives must be
expressed as functions of returns to scale. This general relation could be
difficult to interpret. This is why we will precise the analysis for two inputs
(N = 2) and two outputs (M = 2), but without added restrictions on inputoutput correspondence and productions functions. Consequently, Hessian
H will be replaced by a second derivative. But this latter will have the same
”mathematical structure” as second derivatives of Hessian. Therefore the
main properties linking P P F and returns to scale will appear with an easier
interpretation.
3
3.1
Production-Possibility Frontier
shape as a result of variable returns to scale
Definition of the problem
For M = 2 and N = 2, if we take input endowment as unit of measure, we
have x̄ = (1, 1); then, with xij /xj = λij ∈ [0, 1] , ∀i, j = 1, 2, λij is the share
¡
¢
in activity i. For production functions y1 = y1 λ11 , λ12 and
of input¡x̄j used
¢
y2 = y2 λ21 , λ22 , optimisation problem becomes:
¡
¢
objectif : max y1 = y1 λ11 , λ12
¡
¢
product. constr. : y2 = y2 λ21 , λ22
full/empl. constr. : λ11 + λ21 = 1 and λ12 + λ22 = 1.
Consequently, with the same notation convention as in preceding©secª
tion, P P F corresponds to production function y 1 defined on y(1) = y 2
as solution of optimisation
(see Production-Possibility Frontier, Figure 1).
¡ 2¢
1
1
Then: y = y y respects all assumptions defined above.
¡ 1 1¢
Furthermore,due
¡ 2to 2the
¢ full employment constraint, posing λ1 , λ2 =
(λ1 , λ2 ), we have λ1 , λ2 = (1 − λ1 , 1 − λ2 ). One notes the input intensities k1 = λ1 /λ2 ; k2 = (1 − λ1 ) / (1 − λ2 ). which are positive and finite if
12
and only if both inputs are essential for both production units. The mar∂y1 ∂y1
ginal rates of substitution along the isoquants, τ s1 = −
/
|dy =0 and
∂λ2 ∂λ1 1
∂y2
∂y2
τ s2 = −
/
|dy2 =0 , are continuously differentiable over
∂(1 − λ2 ) ∂(1 − λ1 )
]0, ∞[. because of the assumption A.15. For ki and τ si (i = 1, 2) being
well-defined functions, all inputs must be essential for the production units.
Then ∂yi /∂λj > 0, ∀i, j =n1, 2. In the essential
o input set (the Edgeworth box
® ­
2
except the sides) λ = λ ∈λ : λ ∈ ]0, 1[ ⊂ λ, the efficiency condition
(ii), induces, in the 2X2 case, the well known equality between the marginal
rates of substitution on IF (contact curve). Then
® ­
∂y1 ∂y1
∂y2
∂y2
/
=
/
= −τ s
∀λ ∈ λ ∈ and λ ∈IF :
∂λ2 ∂λ1
∂(1 − λ2 ) ∂(1 − λ1 )
where τ s = dλ1 /dλ2 |
λ∈IF ,
dy1 =dy2 =0
is the identical marginal rate of substitution
between inputs for both production functions, which ensures an
­
® efficient
allocation of inputs. We will introduce the case where ∀λ ∈
/ λ , after
having established the general result for the essential input set.
Now let define returns to scale. For α > 0, activity 1 exhibits constant
returns to scale (CRS1) if αy1 = y1 (αλ1 , αλ2 ), and for α > 1, activity 1
exhibits decreasing returns to scale (DRS1) if αy1 > y1 (αλ1 , αλ2 ) and has
increasing returns to scale (IRS1) if αy1 < y1 (αλ1 , αλ2 ).Mutatis, mutandis
for activity 2. In addition, the local measure of returns to scale of yi is
defined on the basis of equi-proportional variation of inputs and is noted
ρ1 = dy1 /γ 1 y1 , ρ2 = dy2 /γ 2 y2 where γ 1 = dλ1 /λ1 = dλ2 /λ2 and γ 2 =
d(1 − λ1 )/ (1 − λ1 ) = d(1 − λ2 )/ (1 − λ2 ) .
Activity i(i = 1, 2) has locally increasing (decreasing or constant) returns
to scale if and only if at this level of activity i, one has: ρi > 1 (ρi < 1 or
ρi = 1). Returns to scale of activity i are variable if and only if ρi varies on
the definition interval domain of yi .
So, ρ1 is defined from the derivative of production function y1 (λ1 , λ2 ) in
the direction of the vector (λ1 , λ2 ) and ρ2 from the derivative of
y2 (1 − λ1 , 1 − λ2 ) in the direction of the vector (1 − λ1 , 1 − λ2 ).
3.2
Vectorial analysis of return to scale in Edgeworth box
Because integrating returns to scale in the derivatives of production functions implies different derivative directions, vectorial analysis stands out as
a good method for our problem.
13
Recall and pose in vectorial writing, λ = (λ1 , λ2 ); 1 − λ = (1−λ1 , 1−λ2 );
dλ = (dλ1 , dλ2 ); d(1 − λ) = [d(1 − λ1 ), d(1 − λ2 )] = − dλ.
Local returns to scale of each production function may be defined through
the scalar product of two vectors divided by the level of production: for ρ1 ,
the scalar product of the gradient vector ∇y1 (λ) = (∂y1 (λ)/∂λ1 , ∂y1 (λ)/∂λ2 )
and λ divided by y1, and for ρ2 , the scalar product of ∇y2 (1 − λ) =
(∂y2 (1 − λ)∂(1 − λ1 ), ∂y2 (1 − λ)∂(1 − λ2 )) and 1 − λ divided by y2 .2
The scalar product being the product of the magnitudes of both vectors
and the cosine of the angle between vectors one has:
(4)
ρ1 =
∇y1 (λ)λ
k∇y1 (λ)k kλk cos θ1
=
; ∀λ ∈ ]0, 1[2
y1
y1
∇y2 (1 − λ) (1 − λ)
k∇y2 (1 − λ)k k1 − λk cos θ2
=
; ∀λ ∈ ]0, 1[2
y2
y2
£
£
® ­
£
£
For λ ∈ λ ,if λ ∈IF and 1− λ ∈IF, the angles θ1 ∈ 0, π2 and θ2 ∈ 0, π2 ,
because they are acute as a result of P4, P5, P6 and A.15, as shown in the
Edgeworth box of Figure 2. In addition, in this case, because the gradient
vectors are calculated for an efficient allocation of inputs they are both
perpendicular to the common tangent to isoquants of each production unit,
which has the direction of vector (1, τ s ) Therefore gradient vectors have
the same direction equal to vector (1, −1/τ s ). As a result, they are not
perpendicular to vectors λ and 1 − λ for all that IF is include in the essential
subset.3
Furthermore, as the derivative direction of production functions at a
point y0 ∈ P P F is the tangent to P P F if, without loosing generality, one
considers for our problem that dy1 > 0 and dy2 < 0, one has:
(5) ρ2 =
(6)
dy1 = ∇y1 (λ)dλ = k∇y1 (λ)k kdλk cos ϕ > 0
°
°
dy2 = ∇y2 (1 − λ) d (1 − λ) = − ° ∇y2 (1 − λ) ° kdλk cos ϕ < 0
h πh
where ϕ ∈ 0,
is the acute angle between the gradient direction and the
2
tangent to IF which are not perpendicular due to P4, P5, P6 and A.15.
(7)
2
In Edgeworth box, as shown in Figure 2, the vectors are reported to axis having the
low-left point 01 as origin when activity 1 is concerned and the high righ point 02 for
actitivity2
® ­
3
We will suppose λ ∈ λ , except if we mention the contrary
14
02
∇ y¹ = ∇ y²
(dλ 1 , dλ 2 )
θ2
θ1 ϕ
(1,k 2 )
(1,k 1 )
(τ s ,1)
A
01
λ2
(1,k1)
∇y¹ =∇
∇y²
θ1
ϕ
(τs,1)
C1
B
θ2
(dλ1, dλ2)
(1,k2)
D
C2
A
Figure 2
Vectorial analysis of returns to scale in Edgeworth box
15
As functions yi (i = 1, 2) appear as a solution of the optimisation problem, hence (y 1 , y 2 ) ∈ P P F and from 6 and 7, integrating the efficiency
constraint (ii) , one deduces that dy1 /dy 2 = dy1 (λ)/dy2 (1 − λ) | λ∈IF .
1−λ∈IF
The first derivative 2 y1 = dy 1 /dy 2 determines the slope of P P F 4 . One has:
°
°
°∇y1 °
dy1
1
° = − t < 0
= −°
(8)
2y =
°∇y2 °
dy2
dy 1 /d1
dy 1 /d2
=
−
represents the absolute value
dy 2 /d(1 − 2 )
dy2 /d(1 − 1 )
of the marginal transformation rate on P P F and may also be interpreted as
the absolute value of the marginal input transfer rate equal for each input.
Furthermore, the equiproportional variation of inputs i , i = 1, 2, used
for the calculation of returns to scale on IF when dy1 > 0 and dy2 < 0 as
one supposes, are from 4, 6, for 1 and from 5, 7 for 2 :
where t =−
(9)
1 =
kdλk cos − kdλk cos > 0; 2 =
<0
kλk cos 1
k1 − λk cos 2
They express the equiproportional variation of inputs taking in consideration
that they are not necessarily used in the same proportion by production
units. The respect of efficiency when productions vary, implies that inputs
allocation vary along IF . But in order to make appear returns to scale in
the formalization, the equiproportional variation must be linked to efficiency
allocation of inputs. It is what 9 does. Zoom on Figure 2 clarifies this
question. For an infinitesimal variation of inputs from A ∈ IF , the direction
will be the tangent direction dλ. The gradient vectors ∇y1 = ∇y2 =
(1, −1/ s ) having A as origin and being perpendicular to the direction of
the vector (1, s ), s being the marginal rate of substitution at A, one has
AB = AC1 cos 1 = AC2 cos 2 = AD cos or:
(10)
d kλk cos 1 = d k1 − λk cos 2 = kdλk cos .
Consequently from 9 and 10 1 = d kλk / kλk and ¤ 2 = d k1 −
£ λk / k1 − λk .
1
2
At once, let us calculate first derivative 2 y on 0, max y , from 4, 5 and
8, each production function being derivable on input interval ]0, 1[:
(11)
2y
1
=−
y1 1 k1 − λk cos 2
y 2 2 kλk cos 1
4
Because y 1 and y 2 are the optimisation solutions, dy1 and dy 2 replace dy1 (λ)
and dy2 (1 − λ) , like this for ∇y1 and ∇y2 which take place for ∇y1 (λ) and for
∇y2 (1 − λ) . This means that the calculation from initial production functions integrates
the efficiency constraint.
16
Considering 9 and 11:
(12)
2y
1
=
y 1 1 1
y 2 2 2
Finally, for considering variable returns to scale, we propose to integrate the
variation through the local elasticity of return to scale 1 and 2 as follow:
1 =
(13)
d1
d2
; 2 =
.
1 1
2 2
A.16. The derivative of returns to scale of each activity to the scale of
production (di / ||dλ|| , ∀i = 1, 2) is finite for 1 , 2 ∈ ]0, 1[.
To characterize the local effect of variable returns to scale note the definition 2.
Definition 2: A production unit i has locally increasing (constant and
decreasing) variable returns to scale if and only if, at this level of production,
the sum of returns to scale and their elasticity is superior to unity: i +i > 1
(equal to unity: i + i = 1 and inferior to unity: i + i < 1).
3.3
3.3.1
General result
The case of essential inputs for each production unit
1
We need the second derivative
22 y to infer
µ
¶ the curvature properties of P P F .
It is given by
22 y
1
=
d −
y 1 1 k1−λk cos 2
y 2 2 kλk cos 1
dy 2
.
³ 1
´
cos 2
First calculate, considering equations 9: d − y y21k1−λk
=
2 kλk cos 1
h
i
1
y 1 k1−λk cos 2
dk1−λk
dkλk
d cos 2
d cos 1
(
+
)
+
+
−
(
+
)
−
−
1
1
1
2
2
2
cos 2
cos 1 .
k1−λk
kλk
y 2 2 kλk cos 1
From 9 and 10, one can write:
´
³ 1
1
cos 2
2 + 2 −1)+tg 1 d 1 −tg 2 d 2 ]
= y 1 1 [ 1 (1 +1 −1)− 2y(
(14) d − y y21k1−λk
2 kλk cos 1
2
2 2
where 1 = |arctgk1 − arctg (−1/ s )| and 2£ = |arctgk
2¢− arctg (−1/
s )|
¢¤
¡
¡
and ∀i = 1, 2 : tgi di = (1 + ki s ) / ( s − ki ) dki / 1 + ki2 − d s / 1 + 2s 5
p
with cos i = 1/ 1 + tg 2 i and cos defined by 10. 6
£
£
Knowing that i ∈ 0, π2 if ki > −1/ s , ¡one has¢ i = arctgk
i +
¡
¢ arctg1/ s =⇒
tgi = (1 + ki s ) / ( s − ki ) > 0 and d i = dki / 1 + ki2 − d s / 1 + 2s ; if ki < −1/ s ,
one has
s =⇒ tg i = − (1 + ki )s / ( s − ki ) > 0 and d i =
¢ −arctgk
¢
¡ i =
¡ i − arctg1/
d s / 1 + 2s − dki / £1 + k¡i2 ; if ki¢ = −1/ ¡s , one has
¢¤ tgi = 0. Then ∀i = 1, 2 : tgi di =
(1 + ki s ) / ( s − ki ) dki / 1 + ki2 − d s / 1 + 2s .
6
It s also possible to calculate tgi di ,from cos i defined by 6 and 7
5
17
y 2 2 ||dλ|| cos , dividing equation
||1 − λ|| cos 2
14 by dy2 , one deduces the general result
® ­ of P P F local curvature
1
through the second derivative 22 y for λ ⊂ λ :
Therefore because dy 2 = y 2 2 2 = −
(15)
22 y
1
=
y 1 1 k1−λk cos 2
(y 2 2 kλk cos 1 )2
[k1 − λk cos 2 (1 + 1 − 1)
+ kλk cos 1 (2 + 2 − 1)
³
´
® ­
d1
d2
1 cos 2
tg
],
IF
⊂
−
tg
λ
+ kλk k1 − λk cos cos
1
2
kdk
kdk
This general result may also be expressed by:
(16)
1
22 y =
y 1 1 k1−λk cos 2
(y 2 2 kλk cos 1 )2
{k1 − λk cos 2 (1 + 1 − 1) + kλk cos 1 (2 + 2 − 1)
h
³
´
d s /kdλk
1 cos 2 1+k1 s dk1 /kdλk
+ kλk k1 − λk cos cos
−
s −k1
1+ 2
1+k12
³
´io
® ­ s
d s /kdλk
1+k2 s dk2 /kdλk
− s −k2
,λ ⊂ λ .
− 1+ 2
1+k 2
2
3.3.2
s
The case with specific inputs
What happens if the optimisation induces a®solution
whereby the inputs are
­
not essential for the production units: λ ∈
/ λ̄ ? For the case 2X2, we have
two possibilities.
First, both activities use only one input which is necessarily different
between activities due to the full employment assumption (A.14.). In this
case, P P F is reduced to one isolated point. The production units are totally
independent because they don’t use the same input. This case is outside our
subject.
Second, one activity k limits itself to one input while the other i uses
both. In the Edgeworth box, L(P P F ) is represented by one of the sides cor(y1, y2 ), ª
responding to the input used
© by both activities. Then for λ1 = L(y), y =
¯ j , ), y2 = y2 (2 ) : k 6= j
one has: L(P P F ) = IF = λ ∈λ : 1j = j , y1 = y1 (
k
k
where input j is specific to activity 1. If we call the input which is used
by both activity when their production is positive, because each production functions may be treated as one variable function, equation 11 becomes
1
1
2
2 y = −y 1 (1 − )/y 2 although equations 15 or 16 become:
(17)
1
22 y =
y 1 1 (1 − )
[(1 − ) (1 + 1 − 1) + (2 + 2 − 1)]
(y 2 2 )2
18
As far as curvature nature of P P F is concerned, the sign of 22 y 1 is
determinant. We first propose to analyse this problem, at the neigborhood
of the axis and secondly at any other locus.
3.4
PPF shape at the neighborhood of axis
Before giving the general proposition describing PPF shape, it is useful to
know how it is at the neighborhood of axis.
Theorem 1: From assumptions A1 to A15 applied to the case with two
production units with two usable inputs and variable returns to scale, one
concludes:
(i) PPF is strictly concave (convex) to origin at the neighborhood of
production axis of the production unit for which all inputs tend to be devoted
if for this allocation of inputs the returns to scale of the other production
unit are decreasing (increasing).
(ii) If the returns to scale of the activity whose production tends to zero
are constant, PPF at the neighborhood of production axis of the unit for
which all inputs tend to be devoted is strictly concave (convex) to origin if
and only if this production unit has decreasing (increasing) variable returns
to scale.
(iii) P P F is a straight line at the neighborhood of one axis if and only
if the two production units have constant variable returns to scale. This
implies that a straight line at the neighborhood of one axis implies a straight
line at the neighborhood of the other axis.
Proof: Take the limit of 15 when y 2 −→ 0 or j −→ 1, ∀j = 1, 2 (the
demonstration is mutatis mutandis if y 1 −→ 0 or j −→ 0).
√
First, note that j −→ 1, ∀j = 1, 2 implies k1 − λk −→ 0, kλk −→ 2
and k1 −→ 1 and from 15, calculate the limit of the third term in brackets.
Consider that kλk k1 − λk cos 1 cos 2 / cos (tg1 d1 / kdλk − tg2 d2 / kdλk)
d1
d2
−sin 2 cos 1 kdλk
), where d i / kdλk
= kλk k1 − λk 1/ cos (sin 1 cos 2 kdλk
(i = 1, 2) is finite. One has cos 6= 0 because when all inputs are essential,
the vector dλ might not be perpendicular to gradient vectors and having
the same direction as the common tangent to isoquant, because dyi 6= 0 for
the definition of dλ.
³
´
d1
d2
1 cos 2
tg
−
tg
Then kλk k1 − λk cos cos
1 kdλk
2 kdλk → 0.
When inputs are not essential, if one input is not used by a production
unit, one refers to 17 where the above expression is equal to zero.
Therefore from 4 and 5, one concludes that:
19
lim
y 2 −→0
22
y1
°
°
¶
°∇y1 ° µ + − 1
2 + 2 − 1
1
1
√
= lim °
+
. From A.16,
°2
cos 2 k1 − k
y 2 −→0 °∇y2 °
2 cos 1
d2
is finite which implies lim 2 = 0, and from P3, ∇y1 and ∇y2
d k1 − k
y 2 −→0
¯+∞
¯
1
are also finite. Consequently, one concludes that: lim 22 y ¯¯
if and only
y 2 −→0
−∞
¯>1
if 2 ¯<1 what established (i).
Furthermore, in this case, if 2 = 1, it is 1 + 1 −1 which determines the
sign of second derivative because, applying Hospital theorem on the basis of
2 − 1
→ 0 what demonstrates (ii)
distance k1 − λk → 0, one has
cos 2 k1 − λk
and induces (iii).
Q.E.D.
This theorem generalizes the Herberg and Kemp’s (1969) theorem.
3.5
Local PPF shape on the whole definition domain
From equation 16, one concludes that:
sign22 y 1 = sign
{k1 − λk cos 2 (1 + 1 −h 1) + kλk
³ cos 1 (2 +´2 − 1)
cos 1 cos 2 1+k1 s
dk1
d s
+ kλk k1 − λk cos 2 −
2
³
´io s −k1 1+k1 1+ s
1+k2 s
dk2
d s
− s −k2 1+k2 − 1+ 2
s
2
If one poses:
A = 1 + 1 − 1; signA = sign k1 − λk cos 2 (1 + 1 − 1) in 15 and
16 or sign(1 − ) (1 + 1 − 1) in 17, if one input is not productive for one
production unit,
B = 2 + 2 − 1; signB = sign kλk cos 1 (2 + 2 − 1) in 15 and 16 or
sign (2 + 2 − 1) in 17, if one input is not productive for one production
unit. Then one has: A T 0 if and only if 1 + 1 T 1 and B T 0 if and only
if 2 + 2 T 1. Pose also
µ
¶
µ
¶
1 + k2 s dk2 / kdλk d s / kdλk
1 + k1 s dk1 / kdλk d s / kdλk
−
−
−
∆=
s − k1
1 + 2s
s − k2
1 + 2s
1 + k12
1 + k22
d1
d2
= tg1
− tg2
.
kdλk
kdλk
Even when A and B constitute the variable returns to scale effect of each
activity on P P F curvature, ∆ corresponds to the input intensities effect.
As shown in 15 and 16, ∆ additionally operates with returns to scale to
describe the P P F shape. A deep analysis of sign∆ justifies itself. We just
20
propose to express ∆ in a way, which permits to understand how the main
variables play and to collate our result with the main results in economic
literature.
3.6
Analysis of input intensities effect
3.6.1
The case of one specific input
Lemma 1: From assumption A1 to A16 applied to the case with two production units with two usable inputs and variable returns to scale, if one input
is locally specific to one production unit, there is no local input intensities
effect on P P F .
Proof: In the case 2x2, if one input is specific to one production unit,
one has ∆ = 0 as shown in 17.
Q.E.D.
If the inputs are only usuable but not essential, with one production unit
using only one input, one has:
(18)
1
22 y =
3.6.2
y 1 1 k1−λk cos 2
(y 2 2 kλk cos 1 )2
[k1 − λk cos 2 (1 + 1 − 1) + kλk cos 1 (2 + 2 − 1)]
The case of equal input intensities
A particular case, but of interest for many applications is this when all
differences in input intensities are disregarded in order to have equal input
intensities for each activity on the whole definition domain. Because of
full employment assumption, passage from one efficient input-output vector
to another implies transfer of freed inputs from the first activity to the
second, without changing input intensities, as inputs are freed in the same
proportion. In fact the above hypothesis implies that for each activity, each
input is used in the same proportion of its endowment. This last proportion
determines the scale of activities which is kλk for activity 1 and k1 − λk for
activity 2.
Lemma 2: From assumption A1 to A16 applied to the case with two
production units with two usable inputs and variable returns to scale, when
inputs are both locally essential for the production units, there is no local
input intensities effect on P P F if the input intensities of both productions
are equal.
Proof: If k1 = k2 = 1 at the neighborhood of any P P F locus, one has
from note 5: 1 = 2 , and d1 = d 2 . Therefore tg 1 d 1 = tg2 d2 = 0
what implies ∆ = 0.
Q.E.D.
21
One deduces equation 18 for ∆ = 0.
Furthermore first derivative 11 may be written:
y 1 1 k1 − λk
y2 2 kλk
√
√
Note also that ∀i = 1, 2 : kλk = 2i and k1 − λk = 2 (1 − i ),
because 1 = 2 .
1
2y = −
(19)
3.6.3
The case of different input intensities
According to economic literature often based on linear homogeneous productions functions, the waited effect when input intensities are different or
linearly independent when they are more than two, is ∆ < 0, which means
that difference of input intensities, would operate, additionally to returns
to scale, to make P P F more concave to origin or less convex to origin depending on the nature of returns to scale. But for production functions
respecting our assumptions, this proposition is false because one may have
∆ > 0, as we are going to show.
In order to understand how the marginal rates of substitution and input
intensities operate, let notice the following property which establishes their
interdependence through the partial returns to scale.
Lemma 3: From assumptions A1 to A16 applied to the case with two
production units with two essential input and variable returns to scale, the
relative variations on PPF of the marginal rate of substitution is equal for
each production unit to the sum of the relative variation of input intensities
and the relative variation of partial
returns to scale ratio.
P
i
i
i
i
Proof: Actually, i =
j=1,2 j yj /y (i = 1, 2) where j yj /y =
j i represents the partial returns of production unit i to input j. Due
to efficiency condition (a common marginal rate of substitution) one has:
1 − s /ki = i /1 i (i = 1, 2). Therefore s = −ki (2 i /1 i ) . With ri =
2 i /1 i (i = 1, 2) , we conclude that:
(20)
s = −ki ri (i = 1, 2)
Consequently:
(21)
dki dri
d s
=
+
(i = 1, 2)
s
ki
ri
Q.E.D.
22
We must express equation 21 under the variation of productions determined by kdλk .
Interdependence of the three variables in equation 21 implies several expressions of ∆ depending on what variables are retained. It is interesting
d s / kdλk
because the constraint of efficiency imto hold in position first,
s
dri / kdλk
plies the equality of the marginal rates of substitution and second,
ri
because the variation of partial returns to scale constitutes a technical characteristic of production functions. As a consequence, one has Lemma 4.
Lemma 4: From assumptions A1 to A16 applied to the case with two
production units, two essential inputs and variable returns to scale, the input
intensities local effect ( ∆) on P P F may be decomposed by addition into
first, the input intensities difference effect ( IIDE) depending on the inputs
intensities difference which jointly acts, by multiplication, with the relative
variation of the marginal rate of substitution on input frontier (IF ) and
second, the partial returns to scale ratios relative variation effect (P RSV E)
which operates through the difference of partial returns to scale ratio relative
variation of both activities each of them being weighted by the tangent of the
acute angle between the gradient vector and the input vector multiplied by a
positive function of input intensity.
Proof: Taking into consideration the expression of ∆ from 16 and the
Lemma 3 (equation 21), after calculations, one has:
∆ =
(22)
k12 − k22
d s / kdλk
s
(1 + k12 )(1 + k22 )
1 + k2 s k2 dr2 / kdλk 1 + k1 s k1 dr1 / kdλk
+
−
s − k2 1 + k22
r2
s − k1 1 + k12
r1
k12 − k22
d s / kdλk
s
(1 + k12 )(1 + k22 )
1 + k2 s k2 dr2 / kdλk
1 + k1 s k1 dr1 / kdλk 7
and P RSV E =
−
.
s − k2 1 + k22
r2
s − k1 1 + k12
r1
Note that tgi = |(1 + ki s ) / ( s − k·i )| .
Q.E.D.
¸
d s / kdλk
Furthermore, signIIDE = sign (
(k1 − k2 ) .
s
If we suppose k1 > k2 , without loosing generality, from our assumptions
d s / kdλk
) is undetermined because on IF for dλ, one
signIIDE = sign(
s
Then ∆ = IIDE + P RSV E where IIDE =
7
¢
¡
Note that ki / 1 + ki2 = sin i cos i , with i = arctgki (i = 1, 2) .
23
may have d s positive, negative or null. However notice from equation 22,
d s / kdλk
< 0 and IIDE < 0 for
that one has d s > 0 (which means that
s
dri / kdλk
dki / kdλk
k1 > k2 ) if and only if
<−
(i = 1, 2). Consequently,
ri
ki
for having IIDE < 0, the difference between partial returns to scale relative variation must be inferior to the opposite of input intensities relative
variation. SignP RSV E is also undetermined.8
Finally, from equation 15 or 16 and the above discussion on ∆, the
Lemma 1, 2, 3, 4 and theorem 1, one deduce the following theorem 2.
Theorem 2: From assumptions A1 to A16 applied to the case with two
production units with two essential inputs and variable returns to scale, one
concludes:
(i) P P F is strictly locally concave (convex) to origin if and only if R =
1 cos 2
< 0 ( > 0). It is a
k1 − λk A cos 2 + kλk B cos 1 + kλk k1 − λk ∆ cos cos
local straight line if and only if R = 0 at the neigborhood of the considered
locus and there is an inflection point if and only if R = 0 at this isolated
locus with change of sign.
(ii) When the input intensities local effect is negative ∆ < 0 (positive:
∆ > 0), P P F is strictly locally concave (convex) to origin if no production
unit produces with increasing (decreasing) variable returns.
(iii) When the input intensities local effect is negative: ∆ < 0 (positive: ∆ > 0), PPF may be strictly locally convex (concave) to origin if at
least one production unit exhibits sufficiently strongly increasing (decreasing) variable returns. The amount by which these variable returns must be
superior (inferior) to unity, is all the greater that the variable returns of the
other production unit and/or the absolute input intensities effect (∆) are
weak.
(iv) When production units use input in the same proportion or if one
input is specific to a production unit, PPF is locally concave (convex or
a straight line) to origin if each production unit, exhibits local decreasing
(increasing or constant at the neighborhood) variable returns.
Proof: Proposition (i) results from local strictly concavity (convexity)
definition through second derivative by considering sign22 y1 .
But, taking into consideration equation 20 which implies that r1 /r2 = k2 /k1 , and the
i d s
equation 21, one deduces 1 + r1 = 2 + r2 = 1, where (i = 1, 2) i = dk
ki / s |IF is
8
i d s
the elasticity of substitution of inputs along IF, and ri = dr
ri / s |IF is the elasticity
of substitution of partial returns to scale along IF . From this property one may induce
several sufficient conditions for having P RSV E < 0.
24
Proposition (ii) is obvious considering the definition 2 of local variable
returns which determines the sign of A and B.
Proposition (iii) results from (i) and (ii).
Proposition (iv) considers the Lemma 2 and 1 which show that for the
considered cases one has ∆ = 0; the application of (i) for ∆ = 0, established
(iv).
Q.E.D.
Our priority in this paper, after having established the general result 15
or 16, is now to bring it face-to-face with the main statements in economic
literature.
4
The general result face to face with anterior
statements
Because we have determined the curvature of PPF with the possibility to
calculate it through the second derivative, we refer to economic literature
interested by this problem. We must notice that, until now, only the homogeneous or homothetic production functions have been studied in detail,
which is much more restrictive than production functions submitted to our
assumptions. In fact the study of homogenous production functions concerns the non-variable returns, when homothetic functions refer to variable
returns in a very restrictive sense as we will see. It is also the reason why
we use a very different methodology. Even though with homogeneous or homothetic functions, the calculation of second derivative on PFF is not too
difficult, when they are neither homogeneous nor homothetic, it is very difficult to exploit the same calculation. This is the reason we have worked on
input frontier (IF ) to deduce the second derivative on PPF.
4.1
PPF shape at the neighborhood of axis
Determining P P F shape when all disposable inputs tend to be devoted to
only one production unit might largely contribute to characterize it. Herberg
(1969) was the first to establish the result for the transformation curve in
the case of homogeneous production functions. Afterwards, Herberg and
Kemp (1969) established the nature of P P F curvature at the neighborhood
of the axis when returns to scale are external to the production unit but
internal to industry. It was a seminal article which especially improved the
theory of international trade when national economies are characterized by
this type of returns to scale. They demonstrated their results through an
homothetic production function with external returns to scale depending
25
on the scale of industry and constant internal returns for each firm whose
production functions are homogeneous of the first degree. It is because the
authors referred to markets prices and were anxious to include the firms
in competitive markets that they maintain constant the internal returns to
scale. Our proposition implies a similar conclusion, but for any returns
to scale, internal or external, analysing the P P F only on the basis of the
technology of each production unit, with respect of our assumptions, much
less restrictive than for production functions used by Herberg and Kemp
because the production functions are neither homogeneous nor homothetic.
Furthermore, in our general result, proposition 1 holds even if only one
input is mobile between production units as demonstrated for the HerbergKemp case by Wong (1996).
4.2
PPF shape on the whole definition domain
Let first notice that when production functions exhibit non variable returns
to scale, they are homogeneous.
The decomposition of returns to scale into partial returns to scale induces
for the production functions 1 and 2:
1 y1 = 1 ∂y1 /∂1 + 2 ∂y1 /∂2 and
2 y2 = (1 − 1 )∂y2 /∂(1 − 1 ) + (1 − 2 )∂y2 /∂(1 − 2 ).
If 1 and 2 are constant they are the degree of homogeneity of the
production functions y1 and y2 because of the reciprocal of Euler’s theorem.
4.2.1
The case of equal input intensities
If returns to scale are not variable as for homogeneous functions and if input
intensities of the two production units are equal, ∆ = 0 and equation 15 or
16 becomes:
(23)
22 y
1
=
k1 − λk 1 y 1 [kλk (2 − 1) + k1 − λk (1 − 1)]
(kλk 2 y 2 )2
a result
it is possible to define P P F shape, not only locally, but ∀ kλk ∈
¤
£As √
0, 2 . Applying theorem 1 for calculating lim 22 y 1 of 23, in this case
y 2 −→0
of identical input intensity, the result is obvious if returns of both activities are increasing (resp. decreasing) or constant. If one activity has increasing returns while the other one has decreasing returns, on λ ∈ ]0, 1[2
means that sign of 22 y 1 changes, and P P F has an inflection point for
i = (1 − 1) / (1 − 2 ), ∀i = 1, 2. It is the only inflection point, what
also confirms the result of Herberg (1969) and Panagariya (1981).
26
4.2.2
The case of different input intensities
The first result determining P P F shape is this of Savosnick (1958) who has
showed that P P F, for linearly homogeneous production functions, is strictly
concave to origin if both production functions use input in different intensities. Manning R. and J.R. Melvin (1992) reverse Savosnick’s technique in
order to establish that any negatively sloped, concave P P F , for an economy
with fixed endowment of inputs, can be derived from some pair of linearly
homogeneous, quasi-concave production functions.
But the main results determining the curvature of P P F were established by Herberg (1969) for any homogeneous production functions. After
having shown that when the literature on international trade at this time
referred to increasing returns, the statements on P P F shape were generally
false, Herberg (1969) proposed a demonstration consisting in transforming
the homogeneous production function into linearly homogeneous functions
because the contract curve (IF ) of two production functions depends only
on the shape but not on the output indices of their isoquants. This permits
him, first to treat the problem with constant returns to scale for the transformed functions, second, to come back to the initial production functions
which are simply the degree of homogeneity power of transformed functions.
Herberg (2000) has generalised the results for the n commodities m factors
case using the same idea as in Herberg and Kemp (1969) by considering
homothetic production functions resulting from a monotonously increasing
transformation of linear homogeneous functions.
In order to show the generality of our result, it is necessary to establish
that it integrates the Herberg’s statements for homogeneous production and
homothetic functions.
Lemma 5: From assumptions A1 et A16 applied to the case with two
production units with essential inputs and for homogeneous or homothetic
production functions, the relative variations of partial returns to scale are
equal.
Proof: If returns to scale 1 and 2 are not variable they represent the
homogeneity degrees of y1 and y2 . Therefore the ratios of partial returns
to scale ri = 21 i (i = 1, 2) are homogeneous of zero degree. As a consei
quence for i = 1, for instance, one has: 1 dr1 /d1 + 2 dr1 /d2 = 0, Then
(1 /d1 + 2 /d2 )dr1 = 0. The problem being treated along the input frontier (IF ), d1 > 0 and d2 > 0 if the two inputs are essential. Consequently
dr1 /r1 = 0 which implies d1 1 /1 1 = d2 1 /2 1 mutatis mutandis dr2 /r2 = 0.
Furthermore if production functions are homothetic, the returns to scale
27
may be variable but in a much more restrictive sense than ours, because their
marginal rate of substitution, like for homogeneous production functions, are
homogeneous of zero-degree which implies also that dri /ri = 0 (i = 1, 2) .
Q.E.D.
In other words, when the production functions are homogeneous or homothetic, from equation 21 the relative variation of the common marginal
rate of substitution on input frontier (IF ) is equal to the relative variation
of the input intensities.
Therefore the relation 16 becomes,
production functions are ho­
® when
mogeneous or homothetic with IF ⊂ λ :
(24)
22 y
1
=
y 1 1 k1−λk cos 2
(y 2 2 kλk cos 1 )2
[k1 − λk cos 2 (1 + 1 − 1)
+ kλk cos 1 (2 + 2 − 1)
k 2 −k 2
1 cos 2 d s /kdλk
1
2
+ kλk k1 − λk cos cos
( s
)],
(1+k 2 )(1+k 2 )
1
2
Note that, if the production functions are homogeneous: 1 = 2 = 0 in 24.
With dy1 > 0 and dy2 < 0, one has d s / s < 0 if and only if k1 > k2
and d s / s > 0 if and only if k1 < k2 . Consequently ∆ < 0 if and only
if k1 6= k2 . This property is true not only locally but also on the whole
definition domain 1 , 2 ∈ ]0, 1[.
Consequently taking in consideration theorem 1, lemma 1, 2, 4, 5 and
equations 24, 18, one deduces the theorem which confirms the Herberg (1969,
2000)’s conclusions for homogeneous and homothetic production functions.
Theorem 3: From assumptions A1 to A16 applied to the case with two
production units and two usable inputs, which exhibit non variable returns to
scale which means that production functions are homogenous one concludes:
(i) P P F is strictly concave (convex) to origin at the neighborhood of
the axis of one output if the other output is produced under decreasing (increasing) returns. Therefore P P F has at least one inflection point if there
are increasing returns in one production unit and decreasing returns in the
other.
(ii) For a given relative variation of the marginal rate of substitution
along input frontier ( IF ),on the whole domain of definition, if input intensities of the two production units are different, the greater this difference is,
the more concave to origin P P F is, if returns of both production units are
decreasing. If returns of both production units are increasing, the greater the
difference of input intensities is, the less convex to origin P P F is. For sufficiently strong difference of input intensities, P P F may be locally concave
28
to origin even if the two production units exhibit increasing returns, except
at the neighborhood of the axis in application of (i). Consequently, to have a
P P F locally convex to origin, the smaller the increasing returns of the two
production unit are, the less the input intensities of productions must differ.
(iii) If the input intensities of both production units are different, P P F
is strictly concave to origin on the whole domain of definition if and only if
no production unit exhibits increasing returns.
(iv) If one production unit uses only one input, P P F is strictly concave (convex) to origin on the whole domain of definition if and only if no
production unit exhibits increasing (decreasing) returns.
(v) When production functions use inputs in the same proportion, PPF
is strictly concave (convex) to origin, on the whole definition domain, if for
each production function, returns to scale are decreasing (increasing) or if
one production unit produces with decreasing (increasing) returns while the
other produces with constant returns. PPF is a straight line on the whole
definition domain, if and only if each production function exhibits constant
returns to scale. If returns to scale of one production unit are increasing
and decreasing for the other, PPF has an inflection point.
(vi) If production functions are homothetic, the propositions (i), (ii),
(iii), (iv), (v) hold, except that, depending on the case, must be taken in
consideration increasing variable, decreasing variable, constant variable returns (i + i , i = 1, 2) instead of increasing, decreasing constant returns.
5
Concluding remarks
Our general result determines the PPF curvature through the second derivative, for the case 2x2. Equation 15 or 16 decomposes it into two main
effects. On one hand, the returns to scale of each production unit effect
which shows that the greater (lower) than one is the sum of local returns
and their local elasticity, the more one would expect to have PPF locally
convex (concave) to origin. On the other hand, the input intensities effect
which appears as a result of two effects, first, the input intensities difference
effect and the partial returns to scale effect. When the inputs are essential,
the latter only operates if the relative variation of partial returns is different
for at least one production unit or, consequently if the relative variation of
the common marginal rate of substitution is different from the relative variation of input intensities for at least one production unit (Lemma 3). This
establishes a main difference with the earlier statements of Herberg (1969,
2000) and Herberg and Kemp (1969) who limited their analysis to homoge-
29
neous or homothetic production functions for which the relative variation of
the common marginal rate of substitution is equal to the relative variation
of input intensities of each production unit (Lemma 3 and 5). Actually,
when the production functions have non variable returns to scale as for homogeneous functions, or variable returns, but submitted to the hypothesis
of homotheticity, the PPF shape is even, while it may be very jagged if the
relative variation of partial returns to scale is different for at least one production unit. In fact, this situation of jagged shape, constitutes the general
case corresponding to our assumptions A.1. to A.16. Therefore the input
intensities effect may act to make PPF concave as well as convex to origin,
while the economic literature, based on homogeneous or homothetic production functions, expects, returns effect apart, that input intensities effect
influences P P F will be concave to origin because, in this case, the input
intensities effect is reduced to input intensities difference effects.
Finally, new progress in the knowledge of PPF shapes implies a deeper
analysis of the input intensities effects, especially of the partial returns to
scale ratio relative variation effect (PRSVE). Sufficient conditions should
determine for jagged shapes if this latter effect operates in favor of a PPF
concave or convex to origin.
References
[1] ARROW, K.J. and HURWICZ, L. (1960): Decentralization and Computation in Resource Allocation, in Essays in Economics and Econometrics in Honour of Harold Hotelling, ed. R.W. Pfouts (Chapel Hill,
University of North Carolina Press), 34-104.
[2] ARROW, K.J., GOULD F.J. and HOWE S.M. (1977): A General Saddle Point Result for Constrained Optimization, in Kenneth J. Arrow
and Leonid Hurwicz (eds), Studies in Resource Allocation Processes,
Cambridge: Cambridge University Press, 178-85.
[3] BEATO, P. (1982): The existence of marginal cost pricing equilibria
with increasing returns, Quarterly Journal of Economics, 97, 669-688.
[4] BEATO, P. and MAS-COLELL A. (1985): On Marginal Cost Pricing
with Given Tax-Subsidy Rules, Journal of Economic Theory, 37 (2),
December 356-65.
30
[5] BONNISSEAU, J-M. and CORNET B., (1988): Existence of equilibria
when firms follow bounded losses pricing rules, Journal of Mathematical
Economics, 17, 119-147.
[6] BONNISSEAU, J-M. and CORNET B., (1990): Existence of marginal cost pricing equilibria in economies with several nonconvex firms,
Econometrica, 58, 661-682.
[7] BROWN, D.J., HEAL, G., ALI KHAN, M. and RAJIV VOHRA,
(1986): On a General Existence Theorem for Marginal Cost Pricing
Equilibria, Journal of Economic Theory, 38(2), 371-79.
[8] CORNET (1982): Existence of equilibria in economies with increasing
returns, in B. Cornet and H. Tulkens, eds, Contributions to economics
and operations research: The XXth anniversary of CORE, The MIT
Press, Cambridge, MA.
[9] CREMER, J. (1977): A Quantity-Quantity Algorithm for Planning
under Increasing Returns to Scale”, Econometrica, 45 (6), September,
1339-48.
[10] DIEKER, E.R., GUESNERIE, R. and NEUEFEIND, W. (1985): General equilibrium where some firms follow special pricing rules, Econometrica, 53, 1369-1393.
[11] GUESNERIE, R. (1975): Pareto Optimality in Non-Convex Economies,
Econometrica, 43 (1), January, 1-29.
[12] HEAL, G. (1984): Equivalence of Saddle-Points and Optima for NonConcave Programmes, Advances in Applied Mathematics, 5, 398-415.
[13] HEAL, G. (1999): The Economics of Increasing Returns. The International Library of Critical Writings in Economics. Edward Elgar Collection.
[14] HERBERG.H (1969): On the Shape of thr Transformation Curve of Homogeneous Production Functions. Zeitschrift für die gesamte Staatswissenschaft, 125, 202-210.
[15] HERBERG.H (2000): On the Shape of Production Possibility Loci
under Variable Returns to Scale: The n Commodity m Factor Case. in
Alan D. Woodland, Economic Theory and International Trade, Essays
in Honour of Murray C. Kemp, Cheltenham/UK and Northampton/MA
(USA), Edward Elgard, 22-36.
31
[16] HERBERG.H. and KEMP, M.C. (1969): Some Implications of Variable
Returns to Scale, Canadian Journal of Economics, II, 3, 403-416.
[17] HERBERG.H. and KEMP, M.C. (1975): Homothetic Production Functions and the Shape of the Production Possibility Locus: Comment,
Journal of Economic Theory, 11, 287-288.
[18] HERBERG.H. and KEMP, M.C. (1991): Some Implications of Variable Returns to Scale: the Case of Industry-Specific Factors, Canadian
Journal of Economics, XXIV, 3, 703-704.
[19] JOHNSON, H.G., (1966): Factor market distorsions and the shape of
the transformation curve, Econometrica, 34, 686-698.
[20] KEHOE, T.J., (1985): Multiciply of equiliria and comparative statics,
Quarterly Journal of Economics, 100, 119-147.
[21] KELLY, J.S., (1969): Lancaster vs. Samuelson on the shape of the
neoclassical transformation surface, Journal of Economic Theory, 347351.
[22] KEMP, M.C., MANNING, R., NISHIMURA, K. and TAWADA M.,
(1980): On the shape of the single-country and world commoditysubstitution and factor-substitution surfaces under conditions of joint
production, Journal of International Economics, 10, 395-404.
[23] KEMP, M.C., KHANG, C., UEKAWA, Y., (1978): On the flatness
of the transformation surface, Journal of International Economics, 8,
537-542.
[24] KEMP, M.C. and SCHWEINBERGER, A.G., (1991): Variable returns
to scale, non-uniqueness of equilibrium and the gain from international
trade, Review of Economic Studies, 58, 807-816.
[25] KHANG, C. and UEKAWA, Y., (1973): The production possibility set
in a model allowing inter-industry flows: the necessary and sufficient
conditions for its strict convexity, Journal of International Economics,
3, 283-290.
[26] LANCASTER, K., (1968): Mathematical Economics, The Macmillan
Company, New York, 127-134.
[27] MANNING, R., and MELVIN, J.R., (1992): The geometric construction of production functions that are consistent with an arbitraty
32
production-possibility frontier, Canadian Journal of Economics, XXV,
2, 485-492.
[28] MARKUSEN, J.R. and MELVIN J.R., (1984): ”The gains from Trade
Theorem with increasing Returns to Scale”, in Kierzkowski, H. (ed.),
Monopolistic Competition and International Trade, Oxford: Oxford
University Press;
[29] MAYER, W., (1974): Homothetic production functions and the shape
of the production possibility locus, Journal of Economic Theory, 8,
101-110.
[30] MELVIN, J., (1968): Production and trade with two factors and three
goods, American Economic Review, 58, 1249-1268.
[31] MERCENIER, J., (1995): Nonuniqueness of solutions in applied general equilibrium models with scale economies and imperfect competion,
Economic Theory, 6, 161-177.
[32] PANAGARIYA, A., (1981): Variable returns to scale in production and
patterns of specialization, American Economic Review, 221-230.
[33] QUIRK, J.P. and SAPOSNIK, R., (1966): Homogeneous production
functions and convexity of the production possibility set, Metroeconomica, 15, 192-197.
[34] SAVOSNICK, K.M. (1958): The Box Diagram and the Production Possibility Curve, Economik Tijdschrift, 3, 183-197.
[35] SHEPHARD, R.W. (1970):Cost and Production Functions, Princeton,
Princeton University Press, 212-222.
[36] VENABLES, A.J. (1984): Multiple equilibria in the theory of international trade with monopolistically competitive commodities, Journal of
International Economy, 16, 103-121.
[37] WONG, K.-Y. (1996): A comment on "Some Implications of Variable
Returns to Scale: the Case of Industry-Specific Factors", Canadian
Journal of Economics, 21, 240-244.
33