Implementation of Multi-Touch Surface using Combined Diffused
advertisement

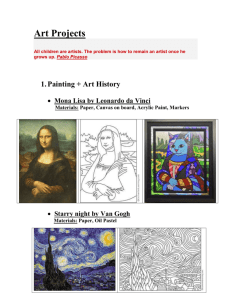
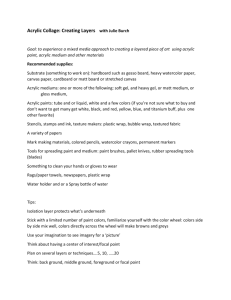
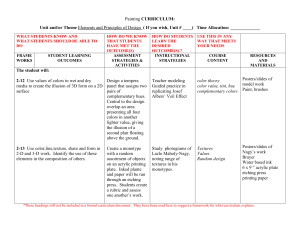
Internati onal Journal of Electronics, Electrical and Computati onal System IJ EECS ISSN 2348-117X Volume 4, Issue 3 March 2015 Implementation of Multi-Touch Surface using Combined Diffused Illumination and FTIR techniques Prannoy Pokharna Sakshi Taneja Dept. of Electronics and Co mmunicat ion Dept. of Electronics and Co mmunicat ion Abstract—The paper talks about the prevalent technologies in the M ulti-touch surfaces which operate exclusive of each other and our research on combining FTIR and Diffused Illumination techniques and the counter party benefits this combination provides. Keywords—multi-touch, CCV, Touchlib. I. INT RODUCTION Multi-touch denotes a set of interaction techniques which allo ws the computer users to control applications with several fingers. Multi-touch consists of a touch screen or touchpad, as well as software that recognize mult iple simu ltaneous touch points. There are several ways to make a mult i-touch surface. Our whole setup of the multi-touch surface is based on the FTIR (Frustrated Total Internal Reflection) technique. It utilizes the IR spectrum of electromagnetic spectrum of light. Basic idea of this technique is to scatter and reflect the waves through the touch surface which is gathered by the camera [1]. Total Internal Reflection describes a condition present in certain materials when light enters one material fro m another material with a higher refractive index, at an angle of incidence greater than a specific angle. The specific angle at which this occurs depends on the refractive indexes of both materials, and is known as the crit ical angle, which can be calculated mathemat ically using Snell’s law [2]. When this happens, no refraction occurs in the material, and the light beam is totally reflected. An FTIR (short for Frustrated Total Internal Reflection) setup involves three vital components: a sheet of transparent acrylic, a chain of infrared LEDs, and a camera with an IR filter. The LEDs are arranged around the outside of the sheet of acrylic so that they shine directly into the thin side surfaces. Fig 1: Scattered frustrated light waves through the acrylic sheet (source: cs.nyu.edu) 11 Prannoy Pokharna, Sakshi Taneja Our aim was to flood the inside of a piece of acrylic with infrared light by trapping the light rays within the acrylic using the principle of Total Internal Reflection [3]. Once the IR light is inside the acrylic, it strikes the top and bottom surfaces of the acrylic at a near-parallel angle. This causes it to be wholly maintained in the acrylic. When the user comes into contact with the surface, the light rays are said to be frustrated, since they can now pass through into the contact material (usually skin), and the reflection is no longer total at that point within the sheet it, the light rays are reflected down. This frustrated light is scattered downwards towards an infrared webcam, capable of picking these ‘blobs’ up, and relaying them to tracking Soft ware. Fig 2: Block Diagram of the Touch Surface Implementation The camera then sends the input to the computer which encompasses the whole touch surface by calibration. These received inputs are processed as specific coordinates relating them to the calibration. The computer comprehends the coordinates with respect to the screen and sends .xml output to the running flash application. The application then produces the desired output. II. ORIGIN OF MULTIT OUCH The origin of mult i-touch technology takes us back to 1982 when Nimish Mehta from the University of Toronto was the first one developing the finger pressure display using this technology. The year 1982 was an important year in mu lti-touch history because after the discovery of Nimish Mehta, other engineering companies like Bell Labs got involved in the development of this technology [5]. Internati onal Journal of Electronics, Electrical and Computati onal System IJ EECS ISSN 2348-117X Volume 4, Issue 3 March 2015 In this way, in 1983 there were many discussions related to mu lti-touch screens and this new revolutionary technology, which led to the development of a touch screen that would change images by using more than just one hand. Over time, Bell Labs decided to focus more on software development rather than hardware and had registered important success in the field o f mu lti-touch technology [6]. Until the 20th century, the mu lti-touch technology was not so popular due to the lack of b reakthroughs in this domain. Ho wever, the success, popularity and use of this technology started to change once with the breakthrough of Pierre Wellner in 1991. In his paper "Digital Desk", Pierre Wellner presented the advantages and mechanism of mult i-touch technology, supporting the idea of mult ifinger use [6]. Furthermore, starting with 2001, all these papers and inventions were further analyzed, imp roved, expanded and developed in today's multi-touch devices, software programs and hardware. The main player in the mult itouch technology market was Apple who in 2007 launched the iPhone. This product led to an increase in popularity and use of this technology as more customized, robust and gesture-based devices were developed since then on. In other words, even if the roots of mu lti-touch technology are related to the year 1982 the real development of mu lti-touch solutions as we see them today is related to the discoveries reached since 2007 and on. Finally, the future of mult i-touch technology seems bright as more and more solutions are developed on a daily basis and imp lemented in all types of businesses and fields of activity like medicine, banking and most importantly - the engineering domain. During the last two years there have been many developments of solutions, either as devices, software programs or hardware. Whether we are thinking of mult itouch tables, multi-touch phones or multi-touch displays, this technology definitely represents an area of expertise which has yet a lot to reveal. III. SYST EM SPECIFICATIONS Multi-touch denotes a set of interaction techniques that allo w co mputer users to control graphical applicat ions with several fingers. Multi-touch devices consist of a touch screen (e.g., computer display, table, wall) or touchpad, as well as software that recognizes mult iple 12 Prannoy Pokharna, Sakshi Taneja simu ltaneous touch points, as opposed to the standard touch-screen (e.g. computer touchpad, ATM), which recognizes only one touch point. Our system consists of the following: Wooden box IR Camera IR Transmitters Acrylic sheet Projection surface Co mputer Each of the requirements was very specific in their configuration to an extent that would affect the preciseness of the touch surface. Therefore, each component was chosen after research and also tried and tested prior to their use with other components, so as to know that they are compatib le with them or not. The above requirements had certain specificat ions that needed to be fulfilled in order that our system worked properly. A. WOODEN BOX The wooden box holds our setup. On the top the acrylic sheet is mounted. Through which the IR transmitters pass the infrared light. When the surface is touched it reflects the lights toward the camera wh ich is positioned at the base near the projector to receive the IR light. The focal length of the camera virtually determines the height of the box we are using. But there is another important factor, which is the “size of the touch surface” which we can calibrate using the software. B. IR CAMERA It is required to catch the reflected beam fro m our touch surface to know the exact location of the touch. The IR camera filters the visible radiations and allows only the infra-red spectrum to pass through the lens. The wavelength transmitted by our LED’s are in range fro m 850-950 n m so the camera should be able to detect infrared in that range of spectrum. To achieve this a filter (i.e. basically a tape inside floppy) is put instead of original filter of webcam. Its specifications included: Resolving power: 640*480 Video format:24bit RGB Frame rate: 320* 240 up to 30 frames per second S/N Ratio :48 d B Focus range:3 cm – infin ity Manual focus Internati onal Journal of Electronics, Electrical and Computati onal System IJ EECS ISSN 2348-117X Volume 4, Issue 3 March 2015 C. INFRARED TRANSMITTERS These are the infra-red led’s which transmit infra-red spectrum of light which cannot be seen by naked eyes. This light travels through our touch surface. When reflected from the surface is collected by the IR camera. Infrared Emitt ing Diode (IR333/H0/ L10) is a High intensity diode, molded in a blue transparent plastic package. These led’s have a peak wavelength of 940 n m and lead spacing of 2.54 mm. It is used due to its optical properties. Acrylic is lightweight, strong and very clear. Acrylic is very clear so FTIR can’t occur which means that if we tried to project onto the acrylic as the light would pass right through. In order for FTIR to take place a projection surface was made. D. PROJECTION SCREEN Projection Screen included the acrylic sheet and the surface. The foundation of the screen is the sheet of acrylic wh ich serves as the mediu m for the infrared light. It is used due to its optical properties. Acrylic is lightweight, strong and very clear. Acrylic is very clear so FTIR can’t occur which means that if we tried to project onto the acrylic the light would pass right through. In order for FTIR to take place a projection surface was made. The surface was made comp laint to the FTIR properties by using a layer of higher RI than the acrylic sheet itself. In our case, we used a layer made of Silicon Sealant. This was cost effective, easy and the layer can be modified as per our requirements. E. SOFTWARE The software takes the input fro m the camera and calibrates it. The Software used here is CCV [4] , an open source software used for comprehension of multi touch surfaces. It converts the colour space or compresses it. The function for the compression of image in RGB colour space to luminance is: Y = (0.299 * R) + (0.587 * G) + (.114 * B) Here, R, G and B are variables with values corresponding to their wavelengths in nanometers. Then, compares the source image fro m the camera and the tracked image post calibration. It performs three functions: 1. Adjusting the background: Setting itself automatically to a new background with the changes in the external environ ment. 2. Stabilizing the in line image: Using the image threshold and the movement filters. 3. Filtering the Image: The filtering is done via the high pass and the amplification filters. 13 Prannoy Pokharna, Sakshi Taneja IV. IMPLEMENTATION CCV receives, burst of images fro m the camera it takes input from. Then, the background it adjusted in accordance with the intensity of light entering the surface fro m outside. Thus, each time there is a significant change in the intensity of light CCV automatically adjusts to it. Once the intensity of inco ming light is considered, then the image is stabilized using the threshold filters and the movement filters. These filters restrict the false blobs which might occur due to change in the intensity. A minimu m threshold is the level of intensity of light which would not be considered as a point. Thus, when the intensity of light entering is high, then the thresholds are kept high and vice versa. The Smooth filter taken into care the hard or the soft transitions in the light intensity. The noise is eliminated by the High pass filters and the filtered image, then can be amplified post the noise reduction. Post this, the actual touch point recognition happens. The whole process of referencing the coordinates can be done as: Considering 2 pixels α at (x, y) and β at (x, y - θ) in the source image. Equation given below is applied to each pixel under consideration: Ynew(x, y) = Yα – Yβ This Ynew gives the difference in the intensity at two different points in the screen space. If, • Ynew >= Threshold(δ) then y=0 (Part of the fingertip) • Ynew < Threshold(δ) then y=255 (Part of the background) Fig 3: CCV Startup Screen For each frame, when the precise touch points are figured out by CCV in the way mentioned above. It can lend the coordinates of these touch points to the external applications for integrated communications. I can communicate with various applications running Tangible user interface programs or other flash applications in the .xml format. Internati onal Journal of Electronics, Electrical and Computati onal System IJ EECS ISSN 2348-117X Volume 4, Issue 3 March 2015 There were other problems with this surface as well. First, it could not work in the places with excessive light. This made it impossible to work in the outdoor environmen ts where it could prove really useful. Secondly, while the infra-red LED’s were working perfectly fine until a change in the external environ ment occurred. As soon as the light entering above the surface changed, the exposure settings from CCV has to be readjusted to current scenario. VI. IMPROVEMENT S MADE A. Working solely with Diffused Illumination A comprehensive working of the Tangible User Interface Applications has been shown here: We researched a bit about the diffused illu mination and tried to use the touch surface without FTIR in the acrylic sheet. This techniques also known as diffused illu mination had two advantages. First, now the surface could be operated with high levels of exposure. Secondly, the light was not reflected now, it came out as a shadow. So we had to invert the image which came through the camera. Fig 4: Working of the Tangible User Interface Applications source: tuio.org V. PRIMARY RESULTS During the in itial adjus tments done in the CCV software; we observed the there was a lot of noise due to the interference of the light present above the surface. This, can be attributed to the fact that the difference in the wavelengths of the visible light and the infra-red light. This is shown below: Fig 5:Configured touch screen As you can see above, the images are too much affected by the noise because of the interference by the light entering from outside. This created a soft edged comprehension of the touch points. 14 Prannoy Pokharna, Sakshi Taneja Fig 6 (a) Image of finger on screen b)Resultant digital image It also had a major issue: In this case, the camera was not receiving light where the fingers were present and receiving elsewhere. So we had to invert the image and apply the high pass filters. As the image was being inverted, it made a lot of noise in the deduction of the coordinates. This was due to the fact that there was a difference in the amount of light entering fro m the other areas than entering where the palm was. B. Combining FTIR with Diffused Illumination Thus, to improve the overall efficiency, we decided to combine both the techniques in order to receive complimentary benefits fro m both of them. We gave an array of the infra-red LEDs all the edge of the acrylic sheet and let the acrylic sheet operate in an environment with excess light. Now the camera was receiving image as a blob only where the fingers blocked the outside light and received light elsewhere. This created a sharp edge which was easily separated by the noise filters of CCV. This setup solved the earlier p roblem of distortion of an inverted image by the CCV due to inadequate noise filtering. Internati onal Journal of Electronics, Electrical and Computati onal System IJ EECS ISSN 2348-117X Volume 4, Issue 3 March 2015 work. Th is work would not have been possible without his valuable guidance. We would also like to thank Mr. Puneet Sharma and Mr. J. B. Sharma for their kind and valuable guidance in the project. REFERENCES Fig 7: Calibration of the touch surface VII. FINAL RESULT S & CONCLUSIONS As shown in the image above, when we use the mixture of both the techniques, it made the image detection much more accurate by the CCV. The coordinates were picked up with a much lesser lag time and were mo re precise than before. Thus, none of the techniques are solely exhaustive enough. Thus we used both the techniques i.e. Diffused Illu mination and the FTIR (Frustrated Total Internal Reflection) to compensate for each other’s shortcomings. While, Diffused Illu mination helped by converting our shortcoming of excess interference of light to our benefit, at the same time, FTIR increased the accuracy of the intercepted coordinates by reducing the noise. A CKNOWLEDGMENT We owe our profound gratitude to our project guide and instructor, Prof. Dr. S. L. M isra for being a constant source of inspiration throughout the course of this project 15 Prannoy Pokharna, Sakshi Taneja [1] [2] [3] [4] [5] [6] Liu, Hongyi, and Xinfu Liu. "The design and implementation of multi-touch screen system based on FTIR theory." e-Education, Entertainment and e-Management (ICEEE), 2011 International Conference on. IEEE, 2011. Bergman, David R. "Symmetry and Snell’s law." The Journal of the Acoustical Society of America 118.3 (2005): 1278-1282. Rong Chang, Feng Wang, Pengfei You, "A Survey on the Development of Multi-touch Technology", APWCS, 2010, Wearable Computing Systems, Asia-Pacific Conference on, Wearable Computing Systems, Asia-Pacific Conference on 2010, pp. 363-366, doi:10.1109/APWCS.2010.99 Schöning, Johannes, et al. "Building interactive multi-touch surfaces."Tabletops-Horizontal Interactive Displays. Springer London, 2010. 27-49. Chang, Rong, Feng Wang, and Pengfei You. "A Survey on the Development of Multi-touch Technology." Wearable Computing Systems (APWCS), 2010 Asia-Pacific Conference on. IEEE, 2010. White, Jeremy. Multi-touch interfaces and map navigation. Diss. UNIVERSIT Y OF WISCONSIN-MADISON, 2009.