Vehicle-Type and Lane-Specific Free Speed Distributions on
advertisement

Vehicle-type and Lane-Specific Free Speed Distributions on Motorways
A novel estimation approach using censored observations
Serge P. Hoogendoorn, Delft University of Technology, Faculty of Civil Engineering and Geosciences, PO Box
5048, Delft, The Netherlands; T: +31.15.2785475; F: +31.15.2783179; e-mail: s.hoogendoorn@citg.tudelft.nl
Abstract. We present a new approach to estimate vehicle-type specific free speed distributions on multilane
facilities based on the concept of censored observations. The original distribution-free method of Kaplan-Meier
is generalized to include partially censored data, i.e. observations that are censored with a certain probability or
‘to a certain degree’. The method is applied using cross-section data collected at a busy two-lane motorway in
the Netherlands. The results provide robust estimations of the speed distribution for the different vehicle classes,
while removing the structural error made when applying more common approaches.
Word count
Abstract:
Main text:
Tables (3)
Figures (7)
Total:
90
4600
750
1250
6690
INTRODUCTION
Knowledge of free speeds under certain conditions is relevant for a number of reasons [1]. The concept of free
speed is for instance an important input to many traffic flow models, such as microscopic models (such as
AIMSUN2 [2], VISSUM (www.ptv.de), FOSIM (www.fosim.nl), PARAMICS
(http://www.sias.com/sias/paramics)) or so-called gas-kinetic models [3, 4]. Insights into free speeds and their
distributions are also important from the viewpoint of roadway design, and for determining suitable traffic rules
for a certain facility. In illustration, elements of the network should be designed such that drivers using the
facility can traverse the road safely and comfortably. It is also of interest to see how desired speed distributions
change under varying road, weather and ambient conditions, and how these distributions are different for distinct
traveler types.
This paper presents a new approach to estimate the free speed distribution for multilane facilities in
general and in particular for motorways. The approach entails using a probabilistic criterion to determine the
conditional probability that a driver driving at a certain time-headway is free or constrained by the driver in
front. Using the estimation results, these probabilities are used to express in which degree speed observations are
censored (i.e. constrained drivers) or not (free flowing drivers). Using the modified Kaplan-Meier estimation
approach proposed in this paper, we can subsequently establish the free speed distribution.
APPLICATIONS OF FREE SPEED DISTRIBUTIONS
In general, the free speed or desired speed of a driver-vehicle combination (simply called a vehicle or a driver in
the ensuing) is defined by the speed driven when the driver is not influenced by nearby road users. The free
speed will be influenced by characteristics of the vehicle, the driver, the road, and (road) conditions such as
weather and traffic rules (speed limits). In [1] a description is presented on how individual drivers choose their
free speed, discussing a behavioral model relating the free speed of a driver to a number of counteracting mental
stresses he or she is subjected to. A similar model can be found in [5]. However, these models have not been
successful in their practical application.
Estimation free speeds and free speed distribution is not a straightforward task. Assuming that the
drivers can be in either car-following or driving at their free speed seems to suggest that only considering those
drivers that are driving freely will provide an unbiased estimate of the free speed distribution. This is however
not the case, since drivers having a high free speed have a higher probability of being constrained than drivers
with a low free speed [1].
In [1], an overview of alternative free speed estimation approaches is presented, covering among other
things the following approaches:
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
1.
2.
3.
4.
Estimation of the free speed by considering the mean speed at low volumes [6]. This method has the
drawback that low volumes generally only occur at non-peak periods (e.g. at night). The free speed
distribution will not be the same at these off-peak periods as during the peak periods due to changed
ambient conditions and changed driver population (consider trip purpose, vehicle type, etc.).
Extrapolation towards low intensities. This method allows using the relevant driving population, but has
been known to be prone to errors [1].
Application of simulation models. This method entails using a microscopic simulation model to
establish relations between observable variables such as volumes and speeds, and the free speed
distribution [7].
Method based on Erlander’s model. In [8], an integral equation is developed for traffic operations on
two-lane roads with the free speed distribution as one of its components. This method is however not
applicable to motorway traffic, since Erlander’s model simple does not apply due to frequent
overtaking.
In [1] it is concluded that all methods above have severe disadvantages, which is the reason why
another estimation approach is proposed. This approach is based on the concept of censored observations, and is
due to Kaplan and Meier [9]. Speed observations are marked as either censored (constrained) or uncensored
(free flowing) using some criteria pertaining to the headway and the relative speed. The approach is parametric,
meaning that a prior specification of the free speed distribution (e.g. normal distribution) must be determined.
This choice may become problematic, especially when the free speed distribution has a bi-modal structure, e.g.
due to large speed differences between person-cars and trucks.
The approach presented here generalizes the approach of [1] by putting forward a non-parametric
estimator rather than a parametric one. This implies that there is no requirement to provide a prior free speed
distribution specification. Furthermore, the approach presented here allows incorporating partially censored
observations (i.e. observations that are censored with a certain probability), making the approach more robust to
small errors in separating censored and uncensored observations.
OVERVIEW OF FREE SPEED DISTRIBUTION ESTIMATION APPROACH
Estimation approaches that are based on censored data, such as the approach of [10] (also referred to as productlimit methods, see [1]), separate observations into two groups: censored and uncensored measurements. When
estimating free speeds, the censored observations reflect speed observations of drivers who are constrained by
the vehicle in front. It is assumed that the speeds of these constrained drivers are less than their free speeds. The
uncensored observations stem from the free flowing drivers, i.e. drivers who are not constrained by the vehicle in
front. These drivers are assumed to be driving at their free speed.
The approach presented in this paper is based on the method first presented in [11], which we have
developed to analyze free speed distributions on two-lane rural headways. The approach presented there is
however not directly applicable to motorway traffic, mainly because of two reasons. Firstly, motorways are
characterized by relatively frequent overtaking. It turns out that small headways are often due to overtaking
vehicles, which are not constrained at all. Secondly, when congestion occurs, methods using time-headways are
not suitable to separate between constrained (censored) observations and unconstrained (uncensored)
observations.
The main contribution of the work presented here is thus the modification of the approach to make it
suitable for motorway traffic. This is achieved by introducing an approach to determine the probability that a
driver is constrained based on its gap and relative speed. The probabilities are subsequently used in the modified
Kaplan-Meier approach to estimate free speed distributions. Sensitivity analysis is performed to ensure that the
estimation results are robust to the separation criteria used to determine the probability that a driver is
constrained. In the remainder of the paper, the overall approach is presented, while the modifications with
respect to the approach of [11] are emphasized.
Application of the original Kaplan-Meier method to free speed distribution estimation
Consider individual vehicle data collected at a cross-section. We assume that for each vehicle i that has passed
the cross-section x, we have determined its speed vi and its distance headway di. Our aim is to determine the
distribution F0(v0) of free speeds v0 using the available distance headway and (relative) speed data.
In general, a speed observation is said to be ‘right censored’ at speed v if the unknown free speed v0 of
the observation is only known to be greater than v (i.e. in case a vehicle is following or constrained). Let vi, for
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
i = 1,2,...n indicate the individual speed observations, which have been sorted in ascending order (vi > vi-1). Let δi
denote the type of measurement based on the fact that a vehicle is following or not. In the method of KaplanMeier [10], two conditions can be distinguished:
1.
2.
δi = 0 : uncensored observation of free speed v0 when vehicle i is driving freely;
δi = 1 : right-censored observation of free speed v0 when vehicle i is constrained by the vehicle in front.
Each observation i is assumed to have its own specific free speed value, in line with the free speed
distribution of the drivers. We can only measure a free speed value if the vehicle is driving freely. Nonetheless,
the censored observations can – and in fact must – be used since they provide information as well, namely that
the free speed value will be higher than the observed value.
Maximum Likelihood estimators
Let us briefly recall the Maximum Likelihood of the free speed distribution F(v) for a sample of speed
observations vi. To this end, we assume that free speed observations are identically and independently distributed
with the probability density function (p.d.f.) f(v) and survival function S(v) = 1 – F(v) = Pr(v0 ≥ v). Given the
p.d.f. f and the survival function S of the free speed, for a sample {vi} the so-called likelihood of the sample (i.e.
the possibility of the sample being measured given that the free speeds are distributed according to the free speed
distribution F) is the following [11]:
n
L = ∏ f (vi )1−δi S (vi )δi
(1)
This expression can be used to determine a parametric estimate of the free-speed distribution, e.g. by assuming
that the free-speed is Gaussian distributed [1, 11].
i =1
Non-parametric estimation
For free speed distribution estimation, also a non-parametric form of the free speed survival function S may be
used. This is generally preferred over the parameterized one, since there is no real evidence supporting the
choice of a particular functional form of the free speed survival function. A straightforward approach would
involve using only free speed observations (δi = 0). For estimation of the free speeds, this will generally lead to
biased results since the contribution of the high free speed observations are underestimated. As mentioned
earlier, this is caused by the fact that a driver with a high free speed is more likely to be constrained than a driver
with a low free speed. A straightforward application of the method of [10] then shows that the non-parametric
estimate of the survival function S(v0) of the free speeds can be determined using the following equation
S (v 0 ) =
m ( v0 )
⎛ n− j ⎞
∏ ⎜ n − j +1⎟
δj
⎝
⎠
where m(v0) denotes the number of samples vi that are smaller than or equal to v0, and n denotes the number of
samples (note that m(∞) = n).
(2)
j =1
Probabilistic modification of the Kaplan-Meier approach
The original method of [10] requires explicit distinction between censored and uncensored data, implying that
speed observations vi need to be labeled either constrained or free flowing. In establishing an unbiased
estimation, we can use the conditional probability θi for observation i and label this observation as ‘censored’
with probability θi by drawing from a uniform distribution function. This approach will however increase the
estimation error especially if the sample is relatively small, due to the introduction of additional randomness.
The approach presented here is based on virtually augmenting the dataset. Let N > 0 denote the
augmentation factor and let {uik} denote the augmented data set consisting of nN observations which are simply
N replications of the original dataset {vi} with uik = vi, k = 1,...,N. Furthermore, δik is used to classify between
censored and uncensored data, which is done according to the probabilities θi as follows
⎧0 k ≤ θ i N
(3)
⎩1 k > θ i N
In other words, the fraction of censored observations in the augmented data-set for the original observation i
equals the probability that observation i is censored.
δ jk = ⎨
For the non-parametric estimator, application of Eq. (2) to the augmented dataset yields
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
m ( v0 ) N
δ kj
⎛ (n − j ) N − k ⎞
(4)
⎜
⎟
∏
∏
j =1 k =1 ⎝ ( n − j ) N − k + 1 ⎠
where m(v0) denotes the number of observations in the original sample {vi} that are smaller than v0. If we let N
grow towards infinity, we find:
S N (v 0 ) =
m ( v0 ) N
⎛ (n − j ) N − k ⎞
S∞ (v ) = lim ∏ ∏ ⎜
⎟
N →∞
j =1 k =1 ⎝ ( n − j ) N − k + 1 ⎠
0
= lim
N →∞
m ( v0 )
∏
j =1
δ kj
(5)
⎡ N ⎛ (n − j ) N − k ⎞ ⎤
⎢ ∏ ⎜
⎟⎥
⎢⎣ k =θ j N +1 ⎝ (n − j ) N − k + 1 ⎠ ⎥⎦
We can easily show that:
⎛ (n − j ) N − k ⎞
(n − j ) N − N
n − j −1
=
⎜
⎟ = Nlim
→∞ ( n − j ) N − θ N
(
n
−
j
)
N
−
k
+
1
n
− j −θ j
k = j N +1 ⎝
⎠
j
yielding the following non-parametric estimator for the survival function of the free-flow speed:
m ( v0 ) ⎛
n − j −1 ⎞
S ∞ (v 0 ) = ∏ ⎜
⎟⎟
⎜
j =1 ⎝ n − j + θ j ⎠
N
lim
N →∞
∏
θ
(6)
(7)
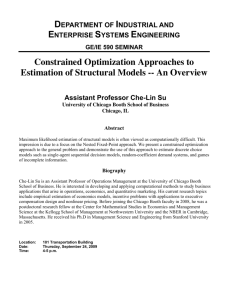
We refer to [11] for technical details, as well as the verification of the estimator using synthetic data. This
verification shows that the approach yields an unbiased estimator of the mean free speed, and is able to
determine the free speed distribution from traffic data (individual speeds and headway measurements) under a
variety of circumstances. Figure 1 shows estimation results, including the (empirical) speed distribution Fn(v),
the distribution of the free speed of the unconstrained vehicles Fn0(v), the modified Kaplan-Meier approach
Fmod. Kaplan-Meier(v), and the actual free speed distribution F0(v). Notice that for this verification example, the
method reproduces the underlying free speed distribution almost exactly.
Fn (v)
Fn0 (v)
Fmod.Kaplan-Meier (v)
F 0 (v )
Figure 1 Results of application of the modified Kaplan-Meier approach to synthetic data.
CRITERIA FOR SEPARATING FREE AND CONSTRAINED VEHICLES
In Eq. (7), θi denotes the probability that an observation vi is constrained. This probability can be determined in a
number of ways. We will briefly discuss several approaches in the ensuing and choose a separation criterion
based on the particular problem of estimating free speed distributions on multilane motorways.
Time headways
The notion of using time headways as a criterion was already proposed by the HCM of 1950. In the HCM of
1985 the criterion is proposed as an benchmark for assessing the LOS on two-lane rural roads, where a value of
5 s is chosen. For motorways, this value may be decreased to much lower values. In illustration, in [12] using a
threshold value of 3.5 s for person-cars and 5.0 s for trucks is proposed.
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
In [11], the distribution free composite (time-) headway distribution model of [12, 13] is proposed to
determine the probabilities that an observation is constrained. More specifically, θi is determined by considering
the conditional probability θ(ti) that a headway ti is constrained, where
dθ
<0
(8)
dt
The main advantage of the approach is that no prior relation for the probability that a vehicle is constrained
needs to be specified, making the approach both flexible and robust. Although in [11] we show that this
approach is in theory also applicable to motorways, practical application remains an issue, especially when the
motorway is oversaturated. Furthermore, overtaking vehicles cut in front of vehicles being overtaking.
In these cases, use of time-headway is prohibited, since large time headways will not indicate unconstrained
observations.
0 ≤ θ (t ) ≤ 1 and
Time headways and relative speeds
The notion that the relative speed should not be too large in the constrained state was first proposed in [14]. The
general idea is that large relative speeds go together with lane changes and overtaking. In [15] detailed vehicle
data have been used to determine a relation between the headway and relative speeds and the share of vehicles
that are constrained under these conditions, for two-lane rural roads in the Netherlands.
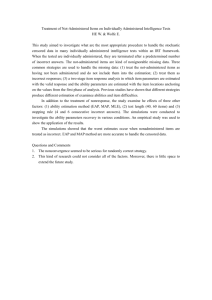
Fuzzy safety margins
In [5] a safe or required distance is defined as the sum of the vehicle length, a constant safety margin, the
distance covered during the response time and the so-called speed-risk factor. In [16], this safe distance is used
together with a relative speed criterion to establish a level-of-constrainedness by means of two membership
functions: a vehicle is more free if its distance margin and its relative speed are larger. This approach is very
suited for the approach presented here, since the level-of-constrainedness can be interpreted as the probability
that a vehicle is constrained, which can be used directly in the modified Kaplan-Meier estimator (7).
Membership θ(1)
Membership θ(2)
1
0
a1
a1+a2
Gap (m)
b1
Relative speed (m/s)
b1+b2
Figure 2 Probability that a vehicle is constrained as a function of the gap (net distance headway headway)
and the relative speed; from [16].
In the remainder, this approach has been chosen to determine the probability that a vehicle is
constrained. Specifically, the relations shown in Figure 2 are used. For a given gap di the membership θ(1)(di) is
determined, while at the same time we determine the membership θ(2)(vir). The ‘probability’ of being constrained
is determined by the product of both as follows:
θ i = θ (di , vir ) = θ (1) (di ) ⋅ θ (2) (vir )
(9)
For the sake of understanding this equation, the function θ(1)(d) can be interpreted as the probability that a
vehicle having gap d is constrained, while the function θ(2)(vr) can be interpreted as the probability that a vehicle
having relative speed vr is constrained. The joint probability can be determined from these functions under the
assumption that both are independent. Typical values used in the remainder for a1, a2, b1 and b2 are 20 m, 150 m,
2.5 m/s, and 2.5 m/s respectively (values taken from empirical study of [16]; see also [1]). In the remainder of the
paper, sensitivity analysis is applied to determine the sensitivity of the outcomes with respect to these
parameters.
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
APPLICATION OF APPROACH TO MOTORWAYS
In this section, we present application results of the approach to the aggregate lane and mixed class traffic flow.
Besides showing the estimation results, we cross-compare the estimates of the mean free speed with the
estimates determined by considering the speed at low volumes.
Data description
The data that have been used were collected at the Dutch motorway A9, near the Dutch city of Badhoevedorp.
The prevailing speed-limit on the site is 100 km/hr. The minimum width of the two motorway lanes
equals 3.5 m. The terrain is level to the extent that the small grades do not influence traffic operations. Moreover,
the curvature of the motorway does not influence traffic flow behavior either. The data consist of passage times,
individual speeds and vehicle lengths, which have been determined using double inductive loop detectors. Using
the vehicle length, an observation is classified as a person-car (< 6m) or a truck (> 6m). Traffic operations at the
site are prone to congestion during the morning peak-hour. Congestion almost never occurs during the evening
peak-hour, or during other periods of the day. In the remainder of the paper, data collected during Wednesday
the 18th of October 1994 was used.
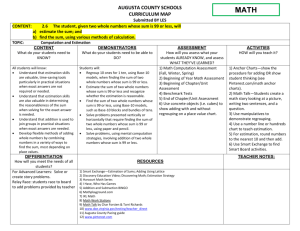
Base estimation results
Let us first present the estimation results from application of the method to aggregate class / lane traffic data.
Figure 3 shows both the empirical distribution function Fn(v), the speed distribution of the unconstrained
vehicles (i.e. probability that the vehicle is constrained is smaller than 0.5) Fn0(v), and the results of the modified
Kaplan-Meier approach Fmod. Kaplan-Meier(v) described in this paper. The figure clearly shows the large differences
between the three distribution functions. That is, only using the speeds of the unconstrained vehicles (i.e. Fn0(v))
clearly leads to an underestimation of free speeds. This is due to the fact that vehicles with a high free speed
have a higher probability of being constrained. For very low traffic volumes, all speed distributions are nearly
equal, due to the fact that all vehicles are freely driving (all observations are uncensored).
1
0.9
0.8
F(v)
F
(v )
Fn0n0(v0)
F
n (v )
Fmod. Kaplan-Meier
F
mod.Kaplan-Meier (v )
0.7
F(v)
0.6
0.5
0.4
0.3
0.2
0.1
0
15
20
25
30
speed v (m/s)
35
40
45
Figure 3 Estimation results for A9 motorway, morning peak (6 AM – 11 AM), 18 October 1994.
For the situation at hand, this only occurs very early in the morning. For instance, Figure 4 shows the
estimation results determined from data collected in the early morning period between 12 AM and 5 AM. The
total number of observations in this period is 735, yielding an average traffic volume of 147 veh/h. Although the
free speed can be determined correctly directly from the data, the specific flow composition (in terms of travel
purpose, fraction of trucks) and ambient conditions renders the estimates not relevant for free speed distributions
for other periods of the day. We can furthermore see (and statistically test) that the free speed is not distributed
normally but tends more towards a uniform distribution (described by a line having a constant slope, see Figure
4). This is why the parametric approach described in [1] is not applicable.
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
1
F(v)
F
(v )
Fn0(v0)
Fnn0 (v)
F
Fmod.Kaplan-Meier
(v )
mod. Kaplan-Meier
0.9
0.8
0.7
F(v)
0.6
0.5
0.4
0.3
0.2
0.1
0
15
20
25
30
35
40
speed v (m/s)
45
50
55
Figure 4 Estimation results for A9 motorway, dilute morning period (12 AM – 5 AM), 18 October 1994.
Bootstrap standard error estimation results
To assess the statistical properties of the estimators, a non-parametric bootstrap algorithm [17] was implemented.
Table 1 shows an overview of the bootstrap results. Clearly, the standard errors in the estimates for the mean free
speed and the free speed variance decreases as the sample size increases. The standard error reduces
approximately with the factor 1/ n . Also note that the standard errors are dependent on the data collection
period. It turns out that the standard errors are relatively small.
Table 1 Bootstrap standard error estimation results, 18 October 1994.
Period
Bootstrap
sample size
250
1000
4000
6 AM - 11 AM
11AM - 3 PM
3 PM - 7 PM
mean
standard
deviation
mean
standard
deviation
mean
standard
deviation
0.40
0.19
0.11
0.29
0.18
0.10
0.34
0.16
0.09
0.23
0.16
0.07
0.34
0.18
0.09
0.30
0.19
0.09
Sensitivity to separation criteria
Let us close of this section by considering the influence of the separation criteria on the estimation results. That
is, we modify the parameters describing the probability θ i = θ (di , vir ) . Table 2 shows the results of this analysis,
from which we may conclude that the approach is quite insensitive to the parameters describing the probability
that a vehicle is constrained. For instance, we see that when the parameter a2 (see Figure 2) increases by 33%
(from 150 to 200), the mean free speed increases with 1.6% only. We can draw similar conclusions for the other
parameters. Based on these findings, we conclude that the approach is robust and will thus provide realistic
results for a wide range of separation criteria values ai and bi, given that the parameter values are at least
adequate (i.e. near the values for ai and bi provided in this paper).
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
Table 2 Results of sensitivity analysis. For an explanation of the parameters a1, a2, b1 and b2, see Figure 2.
19-10-1994
reference
change in parameters
relating to gap
speeds unconstrained
vehicles
standard
mean
median
deviation
27.6
4.29
27.22
mod. Kaplan-Meier
mean
31.2
standard
median
deviation
parameters
a1
a2
b1
20
150
2.5
4.41
31.71
-0.80% -0.70% -1.01% -2.50%
0.68%
-1.89%
100
0.80%
200
b2
2.50 % change
-33.3%
1.63%
1.03%
1.60%
-0.45%
1.89%
-0.11% -9.32%
0.00%
-0.51% -0.45%
0.00%
0.14%
1.17%
0.00%
0.77%
0.68%
0.95%
0.14%
-6.06%
0.00%
1.57%
1.36%
1.86%
5.0
100.0%
change in parameters -2.64% -3.73% -3.09% -7.37% 0.23% -8.86%
relating to relative speed 2.97% 2.56% 5.11% 4.20% -5.90% 3.44%
0.0
-100.0%
-2.21% -1.63% -14.11% -4.07%
3.63%
-4.45%
33.3%
1.25
-50.0%
5.00
100.0%
50
150.0%
0
-100.0%
LANE-SPECIFIC AND CLASS-SPECIFIC SPEED DISTRIBUTIONS
In the previous section, we have shown that the approach is robust to the exact parameter settings of the
separation criterion. We have also shown that the standard errors are relatively small. It is therefore very likely
that the estimation results are realistic and reflect the actual free speed distributions adequately.
This section shows the results of applying the modified Kaplan-Meier approach to data on specific lanes
and for specific user-classes (person-cars and trucks). Table 3 provides an overview of the estimation results.
Note that for all results shown in the table, we find that the estimation results are generally consistent, e.g.
E ( v 0 ) = φP E ( vP0 ) + φT E ( vT0 ) with φP + φT = 1
where φT and φP respectively denote the share of trucks and person-cars respectively.
TRB 2005 Annual Meeting CD-ROM
(10)
Paper revised from original submittal.
Table 3 Overview of estimation results for A9 motorway, 18 October 1994. Table shows results for the
entire cross-section (*) and per lane (1, 2); mixed class (*) and per class (P(erson-cars), T(rucks)). Besides
the mean and standard deviation of the speeds, it also shows the mean and standard deviation of the
speeds of the unconstrained vehicles, as well as the mean and standard deviation of the free speed
determined using the modified Kaplan-Meier approach.
19-10-1994
speeds
speeds
unconstrained
vehicles
mod. Kaplan-Meier
Period
lane
class
mean
standard
deviation
mean
standard
deviation
mean
standard
deviation
6 AM - 11 AM
*
1
2
*
1
2
*
1
2
*
1
2
*
1
2
*
1
2
*
1
2
*
1
2
*
1
2
*
*
*
P
P
P
T
T
T
*
*
*
P
P
P
T
T
T
*
*
*
P
P
P
T
T
T
25.9
24.7
26.8
26.1
25.0
26.8
23.1
23.0
25.4
29.0
27.1
30.6
29.7
28.2
30.7
23.9
23.8
25.8
28.9
27.3
30.1
29.3
27.9
30.1
24.2
23.9
27.2
3.89
3.37
4.00
3.91
3.48
4.00
2.09
1.98
2.84
3.85
3.62
3.29
3.51
3.38
3.25
1.87
1.77
2.23
3.70
3.48
3.41
3.55
3.37
3.40
2.01
1.72
2.61
27.7
26.0
29.8
28.4
26.9
29.9
23.2
23.1
25.5
29.6
27.7
32.1
30.7
29.1
32.2
23.9
23.7
25.8
29.8
28.0
32.1
30.6
29.0
32.2
24.0
23.8
26.5
4.30
3.70
4.11
4.15
3.70
4.11
2.07
2.00
2.27
4.18
3.77
3.31
3.54
3.27
3.16
1.85
1.76
2.44
4.04
3.67
3.27
3.60
3.32
3.17
1.84
1.74
2.49
31.2
28.3
32.9
31.6
29.0
33.0
24.6
24.3
27.4
32.1
29.4
34.0
32.8
30.5
34.1
25.0
24.8
26.7
32.7
29.9
34.4
33.1
30.6
34.4
25.4
24.9
28.4
4.41
3.96
3.77
4.13
3.68
3.75
2.81
2.43
3.28
4.33
4.04
3.40
3.75
3.42
3.30
2.68
2.46
2.62
4.11
3.88
3.25
3.75
3.46
3.20
2.88
2.21
3.21
11AM - 3 PM
3 PM - 7 PM
sample
size
share
15684
6349
9335
14572
5288
9284
1129
1074
55
9633
4391
5242
8484
3319
5165
1163
1085
78
11734
4814
6920
10923
4065
6858
817
753
64
100%
40%
60%
93%
34%
59%
7%
7%
0%
100%
46%
54%
88%
34%
54%
12%
11%
1%
100%
41%
59%
93%
35%
58%
7%
6%
1%
Lane-specific estimation results
In the previous section, we have studied the results of application of the modified Kaplan-Meier approach to
cross-section data (aggregate lane, mixed class). Let us now focus in particular to the distinct lanes of the
motorway. Figure 5 shows the estimation results for the noon period for the left lane (median lane) and the right
lane separately. The figure clearly shows the differences between the lanes. For one, the mean free speed on the
left lane is much higher than on the right lane due to the keep to the right, overtake of the left traffic regulations
in the Netherlands. Slow vehicles, such as trucks, will stay on the right, while only the faster vehicles will use
the left lane. Also, we can observe that the free speed distribution on the left lane does not appear to be
symmetric; rather, the underlying probability density function is bi-modal. This bi-modality reveals that the
driver population in fact consists of two groups or classes have different free speed distributions, in this case
trucks and person-cars, which will be shown in the ensuing of this section, by considering both distributions
separately. Table 3 provides an overview of the lane-specific estimation results for all periods considered.
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
1
0.9
0.9
0.8
0.7
0.7
0.6
0.6
F(v)
F(v)
0.8
1
FF(v)
n0(v0)
FFnn0(v
(v))
F
Fmod.Kaplan-Meier
(v )
mod. Kaplan-Meier
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
15
20
25
30
35
speed v (m/s)
40
45
FF(v)
n0(v0)
FFnn0(v
(v))
F
Fmod.Kaplan-Meier
(v )
mod. Kaplan-Meier
0
10
50
15
20
25
30
speed v (m/s)
35
40
45
Figure 5 Estimation results for left lane (left) and right lane (right) of the two lane A9 motorway for the
period between 6 AM and 11 AM.
Class-specific estimation results
Let us now focus on the differences between the two distinguished vehicle classes (person-cars and trucks).
Figure 6 shows the results of applying the estimation approach for person-cars and trucks for the morning period
(6AM – 11AM); Figure 7 shows the same results for the noon period (11AM – 3PM). In both cases, the
differences between the classes are large (see also Table 3). The class-specific free speed distributions are
approximately the same for all periods, although small differences exist. It appears that the mean free speed is
lower in the morning period than in the noon (and evening) period. This can be plausibly explained by the fact
that at this location, the morning period is prone to congestion. As a result, drivers may lose motivation to drive
at a high speed, since no personal gain can be attained by doing so.
1
0.9
0.9
0.8
0.7
0.7
0.6
0.6
F(v)
F(v)
0.8
1
F(v)(v)
F
F0n (v0)
Fnn0 (v)
F
Fmod.
(v )
Kaplan-Meier
mod.Kaplan-Meier
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
15
20
25
30
speed v (m/s)
35
40
45
FF(v)
(v )
Fn0(v0)
Fnn0 (v)
F
Fmod.Kaplan-Meier
(v )
mod. Kaplan-Meier
0
16
18
20
22
24
26
speed v (m/s)
28
30
32
34
Figure 6 Estimation results for person-cars (left) and trucks (right) for morning period.
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
1
0.9
Fn (v)
F
Fmod.
(v )
Kaplan-Meier
mod.Kaplan-Meier
0.9
0.8
0.7
0.7
0.6
0.6
F(v)
F(v)
0.8
1
F(v)
F (v )
F0nn0(v0)
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
15
20
25
30
35
speed v (m/s)
40
45
50
F(v)
F
(v )
Fn0n0(v0)
F
n (v )
F
Fmod.Kaplan-Meier
(v )
mod. Kaplan-Meier
0
10
15
20
25
speed v (m/s)
30
35
40
Figure 7 Estimation results for person-cars (left) and trucks (right) for noon period.
Also note that especially during the morning peak, the difference between the Kaplan-Meier free speed
distribution and the other distributions are large, in particular for person-cars. Apparently, many person-cars are
constrained during the morning peak, explaining these large differences. For the period around noon, the
differences for person-cars are less, albeit still significant. For trucks, the differences are much less.
Class-specific and lane-specific estimates
Finally, let us briefly consider the class-specific and lane-specific estimates for the different periods under
consideration. Table 3 provides an overview of all estimation results. The lane-specific / class-specific
estimation results are in line with our expectations: person-cars driver faster than trucks, person-cars driving on
the left-lane drive faster than person-cars on the right lane. Trucks on the left lane drive faster than trucks on the
left lane, but are on average much slower than the person-cars driving on either lane. Clearly, trucks overtaking
on the left lane will be a source of delay and hindrance to the average person-car driving there.
CONCLUSIONS AND FUTURE WORK
The previous sections have shown how the modified Kaplan-Meier approach can be applied successfully to
estimate the free speed distributions of different user-classes driving on specific motorway lanes. We have
shown that the approach is reasonably insensitive to the criteria used to distinguish between constrained and
unconstrained driving. Nevertheless, faulty criteria may cause errors that could be reduced given that the
separation criteria need not be set by the user.
In our previous work [11], this problem was tackled by considered a distribution free time headway
distribution model. This approach was successfully applied to non-motorway data, but cannot be generally
applied to busy, sometimes oversaturated motorways, were overtaking are frequent.
A distribution-free estimation approach can however be developed by using a composite distance
headway distribution model, and estimate its parameters under the assumption that the number of vehicles that
are on a road of a certain length are Poisson distributed. In other words, the distance headway distribution for
unconstrained vehicles is exponential in form and a composite headway model can be used to determine a
stochastic model for the distance headways similar to [12, 13].
First results with this approach have been very encouraging, although they are not significantly different
from the results presented in this paper. Nevertheless, still the use of the relative speed criterion is required to
correct for the overtaking vehicles.
ACKNOWLEDGEMENTS
The data analyzed in this paper has been used at the courtesy of the Dutch Ministry of Transport, Public Works
and Water management, Transportation Research Centre (AVV). The research is part of the research programme
“Tracing Congestion Dynamics – with Innovative Traffic Data to a better Theory”, sponsored by the Dutch
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.
Foundation of Scientific Research MaGW-NWO. The author wishes to acknowledge the anonymous reviewers
for the constructive comments and the resulting improvement of the paper.
REFERENCES
1.
Botma, H., The Free Speed Distribution of Drivers: Estimation Approaches, in Five Years "Crossroads
of Theory and Practice", P. Bovy, Editor. 1999: Delft. p. 1-22.
2.
Barceló, J., et al., Microscopic Traffic Simulation: A Tool For The Design, Analysis And Evaluation Of
Intelligent Transport Systems. Journal of Intelligent and Robotic Systems, Theory and Applications,
2004. (to appear).
3.
Leutzbach, W., An Introduction Into the Theory of Traffic Flow. 1988.
4.
Helbing, D., Verkehrsdynamik. 1997.
5.
Jepsen, M. On the Speed-Flow Relationships in Road Traffic: A Model of Driver Behaviour. in
Proceedings of the Third International Symposium on Highway Capacity. 1998.
6.
Board, H.R., Highway Capacity Manual 2000. 2000.
7.
Hoban, C.J., Overtaking Lanes on Two-Lane Rural Highways. 1980.
8.
Erlander, S., A Mathematical Model for Traffic on a Two-Lane Road with some Empircal Results.
Transportation Research, 1971. 5: p. 149-175.
9.
Nelson, W., Applied Life Time Analysis. 1982.
10.
Kaplan, E.L. and P. Meier, Non-Parametric Estimation for Incomplete Observations. Journal of the
American Statistical Association, 1958. 53: p. 457-481.
11.
Hoogendoorn, S.P., Unified Approach to Estimating Free Speed Distributions. Transportation Research
B (accepted for publication). 2004.
12.
Buckley, D.J., A Semi-Poisson Model of Traffic Flow. Transportation Science, 1968. 2(2): p. 107-132.
13.
Wasielewski, P., Car-Following Headways on Freeways Interpreted by the Semi-Poisson Head-Way
Distribution Model. Transportation Science, 1978. 13.
14.
OECD, Speed limits outside build-up areas. 1972, OECD: Paris.
15.
Botma, H., H. Papendrecht, and D. Westland, Validation of Capacity Estimators based on the
Decomposition of the Distribution of Headways. 1980, Transport & Planning Department
Delft University of Technology: Delft.
16.
Hoogendoorn, S.P., Multiclass Continuum Modelling of Multilane Traffic Flow, in Transport &
Planning. 1999, Delft University of Technology: Delft.
17.
Davison, A. and D. Hinkley, Bootstrap Methods and Their Application. 1997.
TRB 2005 Annual Meeting CD-ROM
Paper revised from original submittal.