02 Contingent Claims Markets
advertisement

2. Contingent Claims Markets
Objectives
A deeper understanding of the pricing function:
-
Introduction of contingent claims
-
Complete market structure
-
Change of probability measure: Risk neutral probabilities
-
Optimal Risk Sharing
-
Graphical presentation of the Pricing Function in the State Diagram
Contents
2.
Contingent Claims Markets
2.1
Contingent Claims
2.2
Risk Neutral Probabilities
2.2
Investors’ Optimal Decision
2.4
Optimal Risk Sharing
2.5
State Diagram and Price Function
Financial Theory, js
Contingent Claims Markets
12
2.1 Contingent Claims
Suppose there are s = 1,2…,S states of the world. The set of states define the state space ℜ S
that defines the maximum set of payoffs investors could purchase or sell. In a simple
example we have three states of the world, e.g. good, middle, and bad economic situations.
Moreover, there n = 1,2…,N are contingent claims who pay 1 € in one state of the world, and
nothing in other states of the world. We denote the price of the contingent claim that pays one
€ in state s as pct s . The prices of the contingent claims present the present values of the s-
()
contingent claims of 1 €.
Obviously, there is a natural limit to the number of contingent claims, N ≤ S . If N = S , the
set of the contingent claims constitute the complete canonical vector basis of the state space,
given by the S-dimensional identity matrix. The contingent claims span the total state space.
If N < S , they establish the canonical vector basis of a N-dimensional subspace of the state
space, given by a N-dimensional identity matrix. In this case contingent claims span only a
subset of the state space.
Assumption A.2.1: Complete Market Structure
Contingent claims span the total state space, i.e. N = S .
A.2.1
Theorem 2.1 Existence of discount factors
Given assumption A.2.1, there exist state contingent (positive) discount factors. They equal
the quotient of contingent claims prices and their probabilities.
Proof: In order to proof this theorem we start from the present value of the state contingent
payoffs of any arbitrary asset given as
()
S
() ()
pt x = ∑ pct s xt +1 s .
s=1
(2.1)
It is convenient to substitute the summation of present values of the state contingent payoffs
by the expectation of the present values of the state contingent payoffs. If we denote the
probability of the occurrence of state s as π t +1 s we can express the expectation of the
()
present values of the state contingent payoffs as
()
S
s=1
( )x s .
()
( s)
pct s
( )π
pt x = ∑ π t +1 s
(2.2)
t +1
t +1
Therefore we can identify the stochastic discount as
( ).
(2.3)
π ( s)
pc ( s ) π ( s ) is sometimes referred as state-price-density. Using (2.3) we express (2.2) as
pct s
()
mt +1 s =
t +1
t
t +1
()
S
()
pt x = ∑ π s
s=1
t +1
Financial Theory, js
() ()
() ()
mt +1 s xt +1 s = E ⎡⎣ mt +1 s xt +1 s ⎤⎦ .
Contingent Claims Markets
(2.4)
13
2.2 Risk-Neutral Probabilities
()
Another common transformation leads to the so-called “risk neutral probabilities”, π *t +1 s .
We define the latter as
()
()
()
()
π *t +1 s = Rtf+1π t +1 s mt +1 s = Rtf+1 pct s .
(2.5)
Of course we have
S
1
=
∑ pc s = E ⎡⎣ mt +1 s ⎤⎦ .
Rtf+1 s=1 t
()
()
(2.6)
With (2.6) we can express equation (2.5) as
()
()
()
π *t +1 s = Rtf+1 mt +1 s π t +1 s =
() π s.
()
( s)⎤⎦
mt +1 s
E ⎡⎣ mt +1
(2.7)
t +1
Moreover, using (2.5) we can rewrite the pricing formula (2.4) as
()
S
()
() ()
pt x = ∑ π t +1 s mt +1 s xt +1 s =
s=1
1 S *
1
π s xt +1 s = f E * ⎡⎣ xt +1 s ⎤⎦ .
f ∑ t +1
Rt +1 s=1
Rt +1
() ()
()
(2.8)
We use the notation E * to indicate that the expectation is based on the risk neutral
probabilities π *t +1 s rather than the real probabilities π t +1 s . Asset prices can be thought of
()
()
()
as the result of a risk neutral evaluation with risk neutral probabilities π *t +1 s , rather than real
()
probabilities π t +1 s .
The transformation from real to risk neutral probabilities is
()
π *t +1 s =
() π s
()
( s)⎤⎦
mt +1 s
(2.9)
t +1
E ⎡⎣ mt +1
The risk neutral probabilities give more weights to the states with above average discounts
(IMRS). From this perspective risk aversion can be thought as giving higher weights to
unpleasant states. Sometimes risk averse people report unrealistic probabilities to catastrophic
events such as plane crashes etc. We should not understand this as an expression of
irrationality, but as referring to risk neutral probabilities, i.e. the product of
Rtf+1 mt +1 s π t +1 s . This product gives important information for decision under uncertainty.
()
()
People pay a lot of attention to contingencies that are highly probable or to contingencies that
are improbable but have disastrous results.
Moreover, we can think of the transformation (2.9) as a change of measure from real
probabilities π t +1 s to subjective probabilities π *t +1 s . This change of the measure is quite
()
()
common, especially in derivative pricing.
2.3 Investors’ Optimal Decision
It is interesting to analyze once more investors’ decision of an optimal inter-temporal
utilization in a world with uncertain income streams:
Financial Theory, js
Contingent Claims Markets
14
S
Max u ( c ) + ∑ βπ ( s )u ⎡⎣ ct +1 ( s ) ⎤⎦
{c ,c (s)} t s=1 t +1
t
(2.10)
t+1
S
S
() ()
()
()
s.t. ct + ∑ pct s ct +1 s = yt + ∑ pct s yt +1 s
s=1
s=1
(2.11)
If we denote the Lagrange multiplier representing the marginal utility of the present value of
wealth in t+1 as λt we receive the first order conditions
( )
u′ ct − λt = 0 ,
()
(2.12a)
()
()
βπ t +1 s u′ ⎡⎣ ct +1 s ⎤⎦ − λt pct s = 0 .
(2.12b)
Of course, we have a condition of the type (2.12b) for all states of the world. Eliminating the
Lagrange multiplier yields the first order conditions of an optimal allocation of consumption
streams between the presence and any arbitrary future state s of the world as
()
pct s =
()
()
π t +1 s β u′ ⎡⎣ ct +1 s ⎤⎦
,
u′ ct
( )
(2.13)
or between two arbitrary different future states of the world, s and w as
( ) = π ( s) u′ ⎡⎣c ( s)⎤⎦ .
pc ( w) π ( w) u′ ⎡ c ( w) ⎤
⎣
⎦
pct s
t +1
t
t +1
t +1
(2.14)
t +1
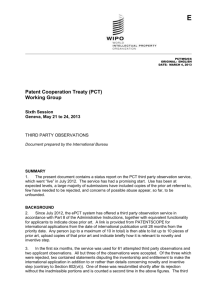
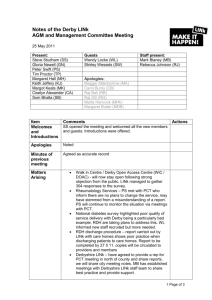
For states 1 and 2 optimal state contingent consumption streams are presented in Figure 2.1.
state 2
ct+1(2)
α
state 1
ct+1(1)
tg α = −
()
pc ( 2 )
pct 1
t
Figure 2.1 Optimal Decision under Uncertainty
()
If mt +1 s refers the MRS between date- and state-contingent goods we can express (2.13) as
()
mt +1 s =
()
( )
()
()
β u′ ⎡⎣ ct +1 s ⎤⎦ pct s
.
=
u′ ct
π t +1 s
(2.15)
Obviously we obtain again the CBAPM:
Financial Theory, js
Contingent Claims Markets
15
S
()
()
S
() ()
()
pt x = ∑ π t +1 s mt +1 s xt +1 s = ∑ π t +1 s
s=1
s=1
()
( )
β u′ ⎡⎣ ct +1 s ⎤⎦
xt +1 s
u′ ct
()
(2.16)
The first order condition (2.13’) implies for any arbitrary pair s, w of states of the world
( ) = u′ ⎡⎣c ( s)⎤⎦ = pc ( s)
( w) u′ ⎡⎣c ( w)⎤⎦ pc ( w)
mt +1 s
mt +1
t +1
π t +1
t
t +1
().
( w)
π t +1 s
t
(2.17)
The marginal rate of substitution of the consumption in two states of the world has to be equal
to the state-price-density of the two states. The quota mt +1 s mt +1 w defines the relation at
()
( )
which an investor is willing to exchange consumption of state w against consumption of state
s through purchases and sales of contingent claims. Thus, this relation defines the MRS
between two state-contingent goods.
Given the choice of consumption streams and the utility function we can calculate the implicit
contingent claim prices which have let the investors to this decision.
2.4 Optimal Risk Sharing
For two arbitrary individuals i and j, from (2.13) or (2.15) and (2.14) or (2.17) follows
π
()
i
t +1
()
()
()
π ti +1 s β iui′ ⎡⎣ cti+1 s ⎤⎦
π tj+1 s β j u′j ⎡⎣ ctj+1 s ⎤⎦
s =
= pct s =
= mtj+1 s π tj+1 s ,
i
j
′
′
ui ct
u j ct
( s) m ( )
i
t +1
( )
()
( )
()
()
(2.18)
and
( ) ( ) = π ( s) u′ ⎡⎣c ( s)⎤⎦ = pc ( s) = π ( s) u′ ⎡⎣c ( s)⎤⎦ = π ( s) m ( s) .
( w) m ( w) π ( w) u′ ⎡⎣c ( w)⎤⎦ pc ( w) π ( w) u′ ⎡⎣c ( w)⎤⎦ π ( w) m ( w)
i
t +1
π ti +1 s mti +1 s
π ti +1
i
t +1
i
t +1
i
i
t +1
t
i
i
t +1
t
j
t +1
j
t +1
j
j
t +1
j
j
t +1
j
t +1
j
t +1
j
t +1
j
t +1
(2.19)
If two arbitrary investors have the same preferences, including time preferences, the same
expectations about future states, and free access to contingent claims (capital) markets we
receive
cti+1
cti
=
ctj+1
ctj
This would imply that people share the shocks equally in relative changes, not in levels. Of
course, these assumptions (alike preferences and completeness of capital markets) are very
restrictive.
The optimal risk sharing as in (2.18) is Pareto optimal – of course, only in the ex ante sense as we can see from the solution of the program
S
S
⎧
⎫
⎧
⎫
i
i
j
⎡
⎤
⎡ ctj+1 s ⎤ ⎬ , (2.20)
λ
u
c
+
βπ
s
u
c
s
+
λ
u
c
+
βπ
s
u
⎨
⎬
⎨
∑
∑
i
i
t
t
+1
i
t
+1
j
j
t
t
+1
j
⎣
⎦
⎣
⎦
i
cti ,ct+1
( s) ,ct ,ct+1 ( s) ⎩
s=1
s=1
⎭
⎩
⎭
Max
j
j
s. t.
( )
()
()
( )
cti + ctj = yt
Financial Theory, js
()
()
(2.21a)
Contingent Claims Markets
16
()
()
()
i
j
ct+1
s + ct+1
s = yt+1 s ,
(2.21b)
where λi and λ j are the weights of the investors in the utility function of the central planer.
If we denote the Lagrange multipliers corresponding to the restrictions (2.21a) and (2.21b) as
µt and µt+1 s we receive the following first order conditions of an optimal allocation:
()
( )
λiui′ cti − µt = 0 ,
()
(2.22a)
()
()
λi βπ t +1 s ui′ ⎡⎣ cti+1 s ⎤⎦ − µt +1 s = 0 ,
(2.22b)
( )
λ j u j ′ ctj − µt = 0
()
(2.22c)
()
()
λ j βπ t +1 s u′j ⎡⎣ ctj+1 s ⎤⎦ − µt +1 s = 0
(2.22d)
From (2.22a) – (2.22d) we receive
()
()
()
()
( )
()
( )
()
()
β iπ t +1 s ui′ ⎡⎣ cti+1 s ⎤⎦ µt +1 s
β jπ t +1 s u′j ⎡⎣ ctj+1 s ⎤⎦
,
=
=
µt
ui′ cti
u′j ctj
or
( )
()
( )
()
()
( )
(2.23)
()
( )
π t +1 s ui′ ⎡⎣ cti+1 s ⎤⎦
π t +1 s u′j ⎡⎣ ctj+1 s ⎤⎦
µt +1 s
.
=
=
π t +1 w ui′ ⎡⎣ cti+1 w ⎤⎦ µt +1 w π t +1 s u′j ⎡⎣ ctj+1 w ⎤⎦
(2.24)
Of course, (2.23) and (2.24) imply (2.18) and (2.19).
2.5 State Diagram and Price Function
()
()
( )
T
We define a vector of prices of contingent claims as pct = ⎡⎣ pct 1 pct 2 … pct S ⎤⎦ , and a
()
()
( )
T
vector of payoffs as xt +1 = ⎡⎣ xt +1 1 xt +1 2 … xt +1 S ⎤⎦ .
The price of the asset is determined as
()
S
() ()
pt x = ∑ pct s xt +1 s .
s=1
(2.1)
The price of the asset is given by the inner product of the vector of contingent claim prices
pct and the vector of the payoffs xt +1 .
The inner product measures the angle between two vectors. This relation can be expressed as
cosθ =
pctT xt +1
pct xt +1
,
(2.25)
where pct and xt +1 present the length of the vectors pct and xt +1 . Because of (2.25) the
asset price defined as the inner product of contingent claim prices pct and asset payoffs xt +1
Financial Theory, js
Contingent Claims Markets
17
can be represented as the product of the length of pc and x, and the cosine of the angle θ .
Finally we can express the price of the asset as the product of the length of pct and the
projection of xt +1 on pct , since the scalar projection of xt +1 onto pct is defined as
(
)
proj xt +1 pct = xt +1 × cosθ .
(2.26)
From this follows
S
()
(
() ()
)
pt x = ∑ pct s xt +1 s = pctT ·xt +1 = pct × xt +1 × cosθ = pct × proj xt +1 pct .
s=1
(2.27)
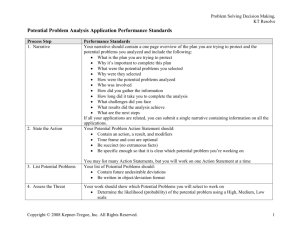
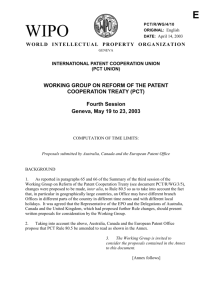
These relations are illustrated in Figure 2.2:
State 2
Payoff
proj(x t+1 |pct )
1
x t+1
pc t
pc(2)
tgα =
θ
α
()
pc (1)
pct 2
t
pc(1) 1
State 1 Payoff
Figure 2.2: Evaluation of Payoffs
Exemplary payoffs are represented by the (green) vector xt +1 , and contingent claim prices by
the (red) vector pct . These vectors form an angle θ satisfying (2.25). The scalar projection,
(
)
xt +1 pct is represented by the (blue) vector proj xt +1 pct .
2.5.1 Planes of Constant Prices
()
The inner product of the vector pct with slope pct 2
()
pct 1 and the vector orthogonal to
pct is zero. Thus, the price of all payoffs along the vector orthogonal to the vector pct is
()
p ( y ) = ∑ pc ( s )y ( s ) = ∑ pc ( s )kx ( s ) = kp ( x ) = 0 .
( )
zero. If xt +1 = 0 , pt x = 0 . Moreover, if yt +1 = kxt +1 , where k > 0 , pt y = 0 , because
t
t
s
t +1
t
s
t +1
t
(2.28)
Because of (2.27), all payoffs xt +1 , which have the same projection onto pct must have the
same price. Thus, lines perpendicular to pct are iso-price-lines. Therefore, all payoffs with
Financial Theory, js
Contingent Claims Markets
18
price equal to one must lie on the “perpendicular” running through the risk free rate Rtf+1 . The
price of contingent claims equals to the projection of the unit vectors onto pct .
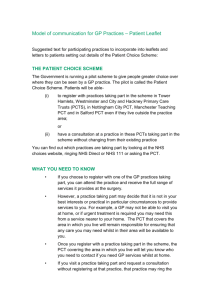
The iso-price-lines can are illustrated in figures below:
State 2
Payoff
Price = 2
Risk free rate
1
pc(2)
Price = 1
tgα =
()
pc (1)
pct 2
t
α
pc(1) 1
State 1 Payoff
Price = 0
Figure 2.3: Iso-Price-Lines
pc(x)
Iso-price-level
Iso-price-line
state 2
1
pc(2)
1
pc(1)
1
state 1
Figure 2.4: Perspective Presentation of Contingent Claims Prices and Payoffs
The pricing function can be considered as a map from the state space to the price line,
p : ℜ S → ℜ as illustrated in Figures 2.3 and 2.4.
Financial Theory, js
Contingent Claims Markets
19
Moreover, the pricing function is linear, i.e. that
(
)
()
( )
pt ax + by = apt x + bpt y .
(2.29)
As a consequence of the linearity in (2.29), the iso-price-lines in Figure 2.3 and 2.4 are linear.
()
As can be seen from Figure 2.5 below, the iso-price-lines have the slope − pct 1
()
pct 2 .
State 2
Payoff
pc(2)
α
γ
β
price = pc
β
ϕ
α
State 1 Payoff
pc(1)
Price = 0
Figure 2.5: Slope of the Iso-Price-Lines
As α and γ complement β to 90°, we have α = γ . And from this follows immediately
β =ϕ .
2.5.2 Discount Factors instead of Contingent Claim Prices
We can understand Figure 2.3 in terms of discount factors rather than contingent claims. We
can define an inner product of random variables as
(
)
mtT+1 x ≡ E mtT+1 xt +1 ,
(2.30)
where
()
()
( )
T
mt +1 = ⎡⎣ mt +1 1 mt +1 2 … mt +1 S ⎤⎦ .
Of course mt +1·xt +1 has all mathematical properties of an inner product. For this reason, we
(
)
often call random variables with the property E mtT+1 xt +1 = 0 orthogonal.
When we run a regression of mt +1 on xt +1 ,
mt +1 = bT xt +1 + ε t +1 ,
(2.31)
we find the linear combination of x which is closest to m, by minimizing the quadratic
deviation of mt +1 − bT xt +1 = ε t +1 , i.e. the variance or the size of ε .
Financial Theory, js
Contingent Claims Markets
20
(
)
We do this by forcing the residual to be orthogonal to x, i.e. that E xtT+1ε t +1 = 0 . The
projection of m on x is the defined as
(
)
proj mt +1 xt +1 = b xt +1 =
T
(
E(x
E mtT+1 xt +1
T
t +1 t +1
x
)x
)
t +1
.
(2.32)
This is often illustrated by a vector of residuals that is perpendicular to a plane defined by
variables x. Thus, when the inner product is defined by a second moment, the projection of m
onto x is a regression as in (2.31).
The concept presented in this paragraph can be extended to an infinite state space. (For details
see Appendix Time Continuous Model.)
Financial Theory, js
Contingent Claims Markets
21