Linear Algebra 2: Final test exam (Sample) Solve, justifying your
advertisement
 Solve, justifying your")
Linear Algebra 2: Final test exam (Sample)
Solve, justifying your answers, the following exercises.
Exercise 1. Let V be a vector space of dimension n over a field F and
T : V −→ V a linear transformation.
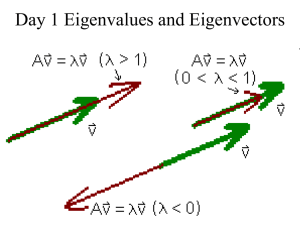
1. Give the definition of eigenvalue λ of T and eigenvector v associated to
λ.
2. Let V = R3 and T : R3 −→ R3 the linear map defined by the matrix
(with respect to the canonical basis B):
MBB (T ) =
2
1 0
1
0 2
−1 −2 0
0
0 0
0
0
0
3
(a) find the eigenvalues of T ;
(b) is T diagonalizable? Justify your answer.
Solution Exercise 1. Let V be a vector space of dimension n over a field F
and T : V −→ V a linear transformation.
1. An element λ ∈ F is an eigenvalue of T if and only if it exists a vector
v ∈ V , v 6= 0 such that T (v) = λv. The vector v is called eigenvector
associated to λ.
2. Let V = R3 and T : R3 −→ R3 the linear map defined by the matrix
(with respect to the canonical basis B):
MBB (T ) =
2
1 0
1
0 2
−1 −2 0
0
0 0
0
0
0
3
.
(a) Eigenvalues of T are zero of the characteristic polynomial pT (t) =detMBB (T )−
tI, where I is the identity matrix. From an easy computation we get
that pT (t) = (3−t)(2−t)(t2 +3). That is T has only 2 real eigenvalues
λ1 = 3 and λ2 = 2
(b) T is NON diagonalizable as his characteristic polynomial is not totally
decomposable in R.
Exercise 2. Bases of Vector Spaces.
1. Give the definition of basis of a vector space.
2. Answer if the following vectors in R4 are linearly independent:
{(1, 2, 0, 3), (0, 0, 3, 5), (1, 1, 1, 0)};
3. are they a basis for R4 ?
4. If we add the vector (0, 0, 0, 1) the set
{(1, 2, 0, 3), (0, 0, 3, 5), (1, 1, 1, 0), (0, 0, 0, 1)}
is a basis of R4 ?
Solution Exercise 2. Let T : R3 −→ R3 the linear map defined by the
matrix (with respect to the canonical basis B):
−1 2
2
B
1
1
1
MB (T ) =
−1 −2 −2
1. Eigenvalues of T are zero of the characteristic polynomial pT (t) =detMBB (T )−
tI, where I is the identity matrix. From an easy computation we get that
pT (t) = (−1 − t)(t − 1)(t + 2). That is T has 3 distinct eigenvalues 1,−1
and −2.
2. T is diagonalizable as it has 3 distinct eigenvalues.
3. Eigenvector associated to the eigenvalue 1 are vectors in the kernel of
MBB (T ) − 1I, that is vetors (x1 , x2 , x3 ) that satisfies:
x1
−1 − 1
2
2
0
1
1−1
1
x2 = 0 .
−1
−2 −2 − 1
x3
0
Solving the system we get vectors of the form (x1 , 2x1 , −x1 ). A generator
is (1, 2, −1). Performing the same computations for eigenvalues −1 and
−2 we get eigenvectors (−1, 1, −1) and (−2, 1, −1). These three vectors
are linearly independent and form a basis of eigenvectors.
4. The matrix P such that P −1 MBB (T )P is diagonal is the matrix of change
of basis P = MBC (id). It is the inverse of the matrix MCB (id) that can be
easily computed and it is equal to
1 −1 −2
B
1
1
MC (id) = 2
.
−1 −1 −1
Exercise 3. Find the space orthogonal to the following subspaces:
1. W1 =< (1, 1, 0), (2, 1, 0) > in R3 ;
2. W2 =< (1, 2, 4, 0), (2, 2, 3, 1) > in R4 ;
3. W3 = {(x, y, z) ∈ R3 | x − y + z = 0} in R3 .
Solution Exercise 3. Find the space orthogonal to the following subspaces:
1. the orthogonal to W1 =< (1, 1, 0), (2, 1, 0) > in R3 is the subspace of
vectors (x1 , x2 , x3 ) such that the inner products (x1 , x2 , x3 ) ∗ (1, 1, 0) = 0
and (x1 , x2 , x3 ) ∗ (2, 1, 0) = 0 are both zero. We get a system of two
equations
(
x1 + x 2 = 0
2x1 + x2 = 0
from which we get solutions (0, 0, x3 ). Hence W1⊥ =< (0, 0, 1) >;
2. the orthogonal to W2 =< (1, 2, 4, 0), (2, 2, 3, 1) > in R4 is the subspace
of vectors (x1 , x2 , x3 , x4 ) such that the inner products (x1 , x2 , x3 , x4 ) ∗
(1, 2, 4, 0) = 0 and (x1 , x2 , x3 , x4 ) ∗ (2, 2, , 3, 1) = 0 are both zero. We get
a system of two equations
(
x1 + 2x2 + 4x3 = 0
2x1 + 2x2 + 3x3 + x4 = 0
from which we get solutions (2x2 + 4x3 , x2 , x3 , 4x2 + 7x3 ). Hence W2⊥ =<
(2, 1, 0, 4), (4, 0, 1, 7) >;
3. By definition, W3 = {(x, y, z) ∈ R3 | x − y + z = 0} in R3 is the space of
all vectors (x, y, z) such that (1, −1, 1) ∗ (x, y, z) = 0 hence it follows that
W3⊥ =< (1, −1, 1) >.