Mechatronics 12 (2002) 37±53
Automated system for welding-based rapid
prototyping
Yu Ming Zhang *, Pengjiu Li, Yiwei Chen, Alan T. Male
a
Department of Electrical Engineering and Center for Robotics and Manufacturing Systems,
College of Engineering, University of Kentucky, Lexington, KY 40508, USA
Received 11 November 1999
Abstract
The manufacturing of ``form-®t-function'' components, rather than just ``form/®t'' parts, is
currently a major issue in rapid prototyping (RP). As a deposition process, gas metal arc
welding (GMAW) has shown promise for RP of metallic parts. In current RP systems, slicing
and planning are done based on STL ®les, and system implementation and post-processing are
designed according to the deposition processes used. Due to the signi®cant dierence between
the welding process and the existing deposition processes, the authors have developed a
dedicated technology, including slicing/planning, system implementation, and post-processing
for RP using GMAW as the deposition process.
For form-®t-and-function testing, a special RP system, including software and hardware, is
developed. This system is capable of handling tolerance speci®cations and material properties.
A novel metal transfer control technology is used to precisely control the size and frequency of
the droplet in order to improve the deposition accuracy. The part to be prototyped is given by
a CAD surface or a solid model in the standard IGES format. A friendly and integrated
environment, referred to as welding deposition wizard (WDW), has been developed to slice the
part, plan the deposition parameters, and control the deposition process.
Test results show that the system can process various models in IGES format with general
entities. The model is sliced according to a comprehensive survey of the tolerance, the speed,
and the implementation feasibility. The minimization of ignition times, the ignition control,
and the crater ®lling control are incorporated in the planning algorithm for deposition parameters. The slicing and planning algorithm also optimizes the transition from interior to
outline pass. The planned deposition parameters ensure the required density and deposition
height are achieved.
In current RP systems, the deposition parameters, for example, the intensity and travel
speed of the laser beam in Stereolithography, are constant. In the developed system, the
*
Corresponding author. Tel.: +1-859-257-6262; fax: +1-859-323-1035.
E-mail address: ymzhang@engr.uky.edu (Y.M. Zhang).
0957-4158/01/$ - see front matter Ó 2001 Elsevier Science Ltd. All rights reserved.
PII: S 0 9 5 7 - 4 1 5 8 ( 0 0 ) 0 0 0 6 4 - 7
38
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
deposition parameters, including the travel speed, torch angle, welding current, and arc
voltage, are changed to achieve the required density and geometry. Unlike current STL-based
approximation algorithms, the outline of each layer is deposited with vector motions to obtain
the original geometry of the part. The interior is ®lled with a raster ®ll pattern to obtain a high
deposition speed. Ó 2001 Elsevier Science Ltd. All rights reserved.
1. Introduction
Over the past 10 years, rapid prototyping (RP) (or layered manufacturing, solid
freeform fabrication, SFF) has gained popularity worldwide [1±4]. The key idea of
RP is an additive layered manufacturing paradigm that maps complex 3D
geometry into simple 2.5D representations, without part-speci®c ®xturing or
tooling [5]. The turnaround time for a typical rapid prototype part can be a few
days. Conventional prototyping may take weeks or even months. Other advantages oered by this technology include the capability to produce components
with small internal cavities and/or with greater geometric complexity, ease of
automatic planning, smaller lot sizes than oered by conventional fabrication
methods [5,6].
At present, the most successful commercial RP process is based on photopolymer materials, such as photocurable resins or plastics [4±8]. Unfortunately, the
properties of these materials are far from those required in the ®nal products,
especially metallic products. The current and future primary eorts are to manufacture ``functional components'' rather than the ``touch/feel/®t'' parts that the
majority of today's RP technologies produce. For the purpose of form-®t-andfunction testing, RP processes are being developed in the ®elds of materials, tolerance, software and system design [11±17]. Among these eorts, many metal deposition processes were developed for the parts with metallic and functional
properties, due to the needs of the market. Typically, metal part prototyping can
be accomplished through sintering [1], laser deposition [3], brazing (soldering) and
droplet-based manufacturing.
Each of these processes has disadvantages. Research work by Ashley [2] indicates that close to full density can only be reached asymptotically in the sintering
process. Hence, further post-processes are needed to achieve full density. Although
laser deposition is more robust and accurate than sintering, the accumulation of
residual thermal stresses resulting from fusing and constraining materials of differing temperatures [3] can cause warpage, delamination, and surface ®nish defects
in the ®nal part. Soldering and brazing have the obvious disadvantage of adding
bonding materials to the part which are normally undesirable for its function or
performance [4].
Even droplet-based manufacturing processes have their limits. They can obtain
full density metal parts with required material directly and thus eliminate the cost
associated with the many steps required for post-processes [5]. Several droplet
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
39
production processes have been developed to improve deposition quality, including
thermal spraying, welding, microcasting. However, because of its better controllability of size, ¯ux, velocity, trajectory and thermal states of the droplet and the
substrate thermal state [6±10], the welding method is a more promising way to obtain
high quality metal parts through RP.
The preliminary method for building up three-dimensional objects by deposit
welding is comparable to surfacing [18,19]. Form shoes are used to support the
deposited metal, which impairs the universality of the process. Welding RP based on
the layered-manufacturing concept was developed by Prinz [20]. Some other welding
deposition methods were investigated, such as micro-arc welding [21] and a special
apparatus for gas metal deposition [22]. This present research focuses on the development of welding-based deposition method and system.
RP processes all begin with a design created on a CAD surface or solid modeler.
The designer generates an output ®le (such as .STL ®le) that approximates the
surface of the part. Then the ®le is transferred to a computer whose program slices
the geometric model to generate cross-section layers, which are used to construct the
part layer by layer. The current procedure is established according to the features of
photopolymer systems, such as Stereolithography. It can also be used for laser
sintering or deposition processes, because they all use a laser as the power source.
However, the welding process operates quite dierently. For example, the welding
process has ignition and the pass is wider. If the same interface between the geometric modeling data and deposition system is used in a welding RP system, the
quality and accuracy of the product is not acceptable. Therefore, a new interfacing
process is needed for welding-based RP.
In this study, a welding deposition system was established with a new interface
between the modeling data and the deposition process. The interface is based on
the IGES format, which is compatible with most solid modeling environments.
Many methods were used to improve the quality and accuracy of the part by
slicing and planning the modeling geometric data according to the welding process features. Prototyping tests were made to demonstrate the eect of this interface.
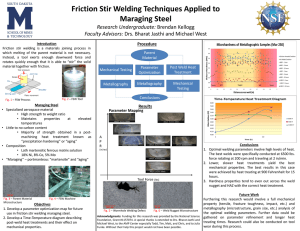
2. Welding-based RP system
The gas metal arc welding (GMAW)-based RP system consists of a RP
machine and its control environment. Its working procedure is depicted in
Fig. 1.
The RP machine consists of a mechanical system and a welding system. The
mechanical system includes a 3D positioner and welding torch rotating equipment.
The welding torch is held by the rotating equipment, which is ®xed to the 3D positioner. The maximum RP working area is 20 in: 20 in: 25 in. The resolution of
the positioner is 0.005 in. The mechanical system is computer controlled to provide
the welding torch with the desired path and angle. All three axes are de®ned by
40
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
Fig. 1. Flow chart for the slicing wizard.
mechanical motion. A 2D mechanical motion on the x±y plane is used to de®ne the
geometry of each layer, and the third axis (z) is eected by pulling the piston up
vertically. In order to eliminate the accumulated error, the positioner is calibrated
automatically after depositing a few layers. A Hobart Thermal Arc welding power
source is used. The maximal current output is over 350 A. The power source is instrumented to be controlled by computer. Typical welding parameters used in our
experiments are shown in Table 1.
The control environment is a user friendly window-based software system for
interfacing to the external geometry-creating environments, processing geometric
model data, slicing model, planning path and controlling deposition process. The
main object of the control system is to generate the appropriate deposition control
signals in the equipment, which in turn drive portions of the physical fabrication
process. The focus of this paper is on the model processing of the control system that
aects the precision and speed of the prototyping process. The principles of the
model processing, with reference to welding features and eects, are discussed in
detail in the following.
Table 1
Typical average parameters used for welding-based RP experiments
Welding
wire
Wire feed
speed (in./min)
Current (A)
Voltage (V)
Travel speed
(in./s)
Shielding gas
E70S-6
SS308
160
160
125
110
25.8
25.0
0.2
0.2
75%CO2 , 25%Ar
95%CO2 , 5%Ar
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
41
3. Model processing
3.1. Model preparation
Currently, slicing in other RP systems is performed on a tessellation of the CAD
model which is an approximation of the model itself. There are several problems at
the heart of this technique, including inaccuracies resulting from round-o errors due
to the approximation of faceting process, as well as dependence on proprietary algorithms for generating the slice data. These problems are re¯ected in the quality of
the surface ®nish of the ®nal product. Decreasing the size of the facet will improve
the resolution but this will increase the processing time signi®cantly. A better way is
to slice the CAD models without ®rst faceting them.
The input model ®le for the present system is in IGES format, a US national
standard, which can be exported by most commercial solid modeling software, such
as PRO/Engineer. After the IGES ®le is imported, the control system processes it
and the physical shape of each entity is retrieved according to the de®nition of the
IGES format. At the same time, a representation in vector format is obtained for
each entity. As shown in Table 2, most common IGES entities are supported by this
system. After separate entities are retrieved, the relationship between these entities is
analyzed. Entities belonging to one physical geometry are linked together. For example, a circle is composed of two separate entities (arcs) in an IGES ®le and they
are linked after the processing. Then, the relative position and relationship between
these physical geometries are analyzed and the solid model is retrieved. Validation of
the model is also conducted to ensure it is a solid. If it is not, it is repaired. Finally,
the model is represented in an internal vector ®le format, on which all following
operations are based. Although vector-based programming is more complicated than
that based on tessellating routines, many drawbacks are eliminated and accuracy is
improved by its use.
Table 2
IGES geometrical entities accepted by slicing wizard
Entity type number
Entity type
100
102
104
108
110
112
114
120
124
126
128
130
140
142
144
Circular arc
Composite curve
Conic arc
Plane
Line
Parametric spline curve
Parametric spline surface
Surface of revolution
Transformation matrix
Rational B-spline curve
Rational B-spline surface
Oset curve
Oset surface
Curve on a parametric surface
Trimmed parametric surface
42
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
3.2. Slicing strategy
After the model is validated, it is then scaled and oriented with respect to the build
chamber, taking into account ease of welding deposition, build time, surface quality
and potential distortion. Then the model is sliced from the bottom to the top with
the selected layer thickness. The layer thickness (typical value is 0.06 in.) in welding
deposition is much larger than that in photopolymer method (typical value is 0.006
in. in Stereolithography). As shown in Fig. 2(a) and (b), if the same slicing method is
used as in a photopolymer system, which slices the model with ®xed layer thickness,
it will lead to very low accuracy, especially for parts with many surfaces or curved
shapes. In order to solve this problem, a scale factor is provided to give ¯exibility to
the selected layer thickness. When slicing to the top surface of the model or to the
curved parts, the layer thickness can be adjusted automatically within the scaled
height range to ®t the shape of the model to improve the accuracy, as shown in
Fig. 2(c). When slicing to the top surface of a physical geometry of the model or of
the whole model, the layer thickness can be adjusted automatically within the scaled
thickness range to ®t the shape of the model to improve the accuracy. In Fig. 2(c),
the two dark shaded layers are created with dierent thicknesses.
The range of the scale factor is restricted by the welding deposition method used.
Normally, the factor is between 0.5 and 2.0, which means the thickness can change
from 0.03 to 0.12 in. for dierent layers. With dierent scale factor, each layer has its
own deposition parameter factor, which will modify the welding current, travel speed
etc. After the slicing process, the cross-section of the model in each layer is obtained,
as shown in Fig. 3. As the model is represented in vector format, the representation
for each sliced geometry is also in vector format. By this means, the accuracy of the
model is maintained.
3.3. Planning strategy
The planning process begins from the outer geometry to the inner geometry. First,
the relationship of the position of all these geometries in each layer is judged to
Fig. 2. The principle of layer thickness adjusting: (a) original solid model; (b) sliced model with constant
layer thickness; (c) sliced model with adjusted layer thickness.
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
43
Fig. 3. The sliced layers of a model.
Fig. 4. The typical relative position types of sliced entities.
determine the ®lling area. The relationship of an outer geometry and its next inner
geometry is called a grade. The geometry belong to the same upper grade geometry
have two types of relationship: subordinate and parallel, as shown in Fig. 4. The
areas corresponding to the odd grade are ®lling areas and those corresponding to
44
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
even grade are blanks. In a complex model, the relationship between ®lling area is
very complicated. Several grades may be involved. However, the complicated ®lling
areas can be simpli®ed to two equivalent ®lling classes, solid ®lling area and hollow
®lling area, as shown in Fig. 5.
In previous RP systems, there are two imaging strategy approaches used to de®ne
the image of a single layer. One approach is to use a raster, where the image is
created as a series of contiguous or overlapping straight-line segments, as shown in
Fig. 6(a). The alternative method is to draw at least the outline of the image with
vector motions, as illustrated by the arrows in Fig. 6(c). The interior is ®lled with a
raster ®ll pattern. The fundamental trade-o here is between speed and precision. A
raster approach is faster and is more universal. However, a raster pattern produces
only an approximation of the outline of the part, with discretization errors apparent
on any edge that is not parallel to the raster motion. This situation is avoided by the
vector approach.
As the width of the line segment (weld pass) in welding-based RP is much larger
than that of other RP methods, it is very important to ®ll the outline of the image
with vector motions. Otherwise, the surface error will be signi®cant. Therefore, the
second imaging strategy is used for welding deposition; that is, the outline of the
image is ®lled with vector motion and the inner part is ®lled with raster approach.
However, the raster ®ll method in this system is quite dierent from previous
methods because each weld path has ignition and ending processes, which do not
exist in other RP systems. It was found in experiments that extra procedures are
necessary to maintain the accuracy and quality of the beginning and ending portions
of each weld pass compared with other portions of the pass. It was also found that
the joints of weld passes can decrease precision. It is necessary to decrease the
quantity of weld passes and the joints between them to the minimum in order to
improve speed and precision.
When designing imaging strategy, compatibility is another important factor that
should be considered. A new imaging algorithm was developed that ful®lls all these
requirements. Based on this imaging strategy, in the solid ®lling area shown in Fig. 5,
the planned paths include one outline path in vector format and one inner raster
Fig. 5. Two simpli®ed ®lling area types.
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
45
Fig. 6. Two approaches to the strategy for imaging a layer: (a) raster ®ll for laser; (b) raster ®ll for
welding; (c) vector ®ll for outline; (d) imaging strategy for welding RP.
path. As shown in Fig. 6(b), contiguous passes for previous raster ®ll method were
linked to one weld pass to decrease the quantity of ignitions and endings. In the
hollow ®lling area with k
0; 1; 2; 3 . . . internal cavities shown in Fig. 5, the planned
paths include one external outline and k internal outline in vector format, and k 1
inner raster paths. The planned path of a model with hollow ®lling area is shown in
Fig. 7.
As the slicing is based on the vector format, the resolution of outline path
planning is higher than that of other RP methods, which are sliced based on .STL
format.
Besides the new imaging strategy, several approaches are used in path planning to
increase accuracy in accordance with features of the welding deposition process.
1. The part of the inner raster paths that connect the outline is planned according
to the curvature of the outline. Thus, the void between inner raster and outline is
decreased signi®cantly. This method is used to obtain the expected thickness of the
next upper layer.
2. A scale factor is applied to the width of the weld pass. As the width of the weld
pass is much larger than in other RP methods, the void left between deposition lines
has a large in¯uence on accuracy by leading to uneven thickness of layers. It is
impossible to overcome this problem with conventional planning strategy. To solve
46
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
Fig. 7. Planned welding paths for one layer.
this problem, a scale factor is added to modify the width of weld pass so as to obtain
layers with equal thickness. The factor is between 0.5 and 1.5. To accomplish this
strategy, a new planning approach was developed. After the geometric deposition
paths were planned, they were reprocessed and welding deposition parameters were
produced for each weld path. Dierent welding parameters were planned for the
dierent width of the weld path. After the planning process, two related ®les are
created. One ®le is for the trajectory of the welding deposition and the other is for the
welding parameters.
3. In order to eliminate accumulated error, the outline and inner raster paths are
planned in a rotating mode. The orientation of each layer is changed, as shown in
Fig. 8. The rotation angle is selected according to the number of layers of the model
along its deposition direction. It has proved to be very eective in eliminating the
accumulated error. The rotating planning model of outline and inner raster paths,
respectively, can be disabled for some special models.
4. Control of parameters and trajectory is added to the start and the end portions
of the weld in order to make their thickness and width similar to that of the central
portion of the weld. Due to the heat sink, the penetration is lower at the start. Thus
the thickness is higher than in the normal portion of the weld. At the end of the weld
pass, because of the ¯owing of the melted metal, the slope shape was created
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
47
Fig. 8. The rotated weld paths for dierent layers.
gradually. These uneven portions of the parts will in¯uence succeeding layers. After
a few layers, a signi®cant deviation from the originally expected shape will occur. At
present, the control method for the start and end portions of the weld pass is
managed by applying dierent deposition parameters at these positions. For example, when a rectangle is to be deposited, two deposition passes are needed. The
trajectory and speed of the torch for one layer is shown in Fig. 9. In the start portion
of the weld pass, the current and travel speed decrease from higher values to the
normal ones. In the end portion of the pass, the current and the travel speed reduce
gradually. In this way, the shape of the weld pass will be ¯exibly controlled. However, these procedures are time-consuming and the utilization should be reduced to a
minimum.
4. Results and discussion
Several parts were deposited with the developed interfacing method. The eect
of the utilized approaches on the improvement of the accuracy was demonstrated. During the deposition process, in order to obtain the proper substrate
temperature, idle time is used between layers. The average deposition rate is
about 2±3 lb/h.
48
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
Fig. 9. Speed and trajectory control for a one-pass-wide rectangle.
Fig. 10. Tube-shaped parts deposited with non-rotated paths: the accumulated error is signi®cant.
As shown in Fig. 10, the tube-shaped prototype was deposited with non-rotated
paths. After only 18 layers, accumulated error at the start and end portions are so
signi®cant that the deposition process cannot be conducted further.
When the strategy of rotated paths is added to the deposition process, the accumulated error is avoided. As shown in Fig. 11, the same tube-shaped prototype
was deposited. The top surface of the part still maintains planeness after 75
layers.
The part illustrated in Fig. 12 was deposited as in a normal welding operation.
The expected shape is a rectangle. However, signi®cant error occurs in start and end
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
49
Fig. 11. Tube-shaped part deposited with rotated paths: no accumulated error occurs.
Fig. 12. Sample for testing the in¯uence of temperature between the layers on the quality of forming. No
start and end control is used. The error is signi®cant.
portions after 28 layers. Due to the ¯ow of molten metal, the error increases quickly
and is very dicult to compensate for. By applying the control in start and end
portions, the error can be completely eliminated. As shown in Fig. 13, after 23 layers,
start and end portions remain the same as other portions.
Fig. 14 shows a part deposited with vector outline and raster inner ®lling deposition. The rotation of planned paths is also applied in the deposition. With these
50
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
Fig. 13. Sample deposited with control of the start and end portions.
Fig. 14. A cone-shaped part deposited with rotated paths.
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
51
Fig. 15. Samples for testing the maximal curvature.
planning methods, the solid model, which was sliced to 70 layers, was deposited with
expected shape and dimension.
Fig. 15 illustrates another part with a relatively complex shape viewed from two
dierent directions and its drawing which shows the deposition by solid areas. All
planning strategies were applied in this model and a satisfactory part was obtained.
5. Conclusions
Test results show that the system can process various models in IGES format
with general entities. The model is sliced in vector format according to a comprehensive survey of tolerance, speed, and implementation feasibility. The minimization of ignition times, the ignition control, and the crater ®lling control are
incorporated in the planning algorithm for deposition parameters. Variable deposition parameters ensure the required density and deposition height will be
achieved.
52
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
In the current experiment, although several eorts were made to increase the
resolution and deposition accuracy, the part was deposited with regular GMAW
process. The surface quality still needs to be improved signi®cantly to meet the requirement of practical application. The welding process needs to be modi®ed to
increase the controllability and deposition accuracy. Welding process using very thin
wire and with high droplet transfer stability will be very helpful. The deposition
trajectory and pose also need to be investigated.
References
[1] Bourell DL, Beaman JJ, Marcus HL, Barlow JW. Solid freeform fabrication: an advanced
manufacturing approach. In: Proceedings of the Solid Freeform Fabrication Symposium. University
of Texas: Austin, TX, 1990, August 6±8. p. 1±7.
[2] Ashley S. Prototyping with advanced tools. Mech Eng 1994:48±55.
[3] Fessler JR, Merz R, Nickel AH, Prinz FB. Laser deposition of metals for shape deposition
manufacturing. In: Proceedings of the Solid Freeform Fabrication Symposium. University of Texas:
Austin, TX, 1996, August.
[4] Amon C, Beuth J, Kirchner H, Merz R, Prinz F, Schmaltz K, Weiss L. Material issues in layered
forming. In: Proceedings of the Solid Freeform Fabrication Symposium. University of Texas: Austin,
TX, 1993, August 9±11. p. 1±10.
[5] Weiss LE, Prinz FB, Adams DA, Siewiorek DP. Thermal spray shape deposition. J Thermal Spray
Technol 1992;1(3):231±7.
[6] Acquaviva P, Chen C, Chun J, Ando T. Thermal modeling of deposit solidi®cation in uniform droplet
spray forming. Trans ASME 1997;119:332±40.
[7] Chun J, Passow H. Droplet-based manufacturing. Ann CIRP 42(1):235±8.
[8] Leatham AG, Lawley A. The Osprey process: principles and applications. Int J Powder Metall
1993;29(4):321±9.
[9] Smith RW, Novak R. Advances and applications in US thermal spray technology. Powder Metall Int
1991;23(3):231±6.
[10] Thorpe ML. Thermal spray industry. Adv Mater Process May 1993; 50±61.
[11] Sridharan K, Perepezko JH. Microstructure control in alloy steel powders. Int J Metall
1994;30(3):301±11.
[12] Swaminathan CR, Voller VR. A general enthalpy method for modeling solidi®cation processes.
Metall Trans 1992;23B(10):651±64.
[13] Annavarapu S, Doherty RD. Evolution of microstructure in spray casting. Int J Powder Metall 1993:
331±43.
[14] Amon CH, Merz R, Prinz FB, Schmaltz KS. Thermal modeling and experimental testing of MD*
spray shape deposition processes. In: Proceedings of the 10th International Heat Transfer Conference,
Brighton, England, 1994, August.
[15] Hartmann K, Krishnan R, Merz R, Neplotnik G, Prinz F, Schultz L, Terk M, Weiss L. Robotassisted shape deposition manufacturing. In: Proceedings of the 1994 IEEE International Conference
on Robotics and Automation. San Diego, CA: IEEE, 1994, May. p. 2890±5.
[16] Thayer III, William J. Uniform droplet generator. US Patent 05392988, 1994.
[17] Orme ME, Muntz EP. Method for droplet stream manufacturing. US Patent 05171360,
1992.
[18] Bronowski H. Device for building up a workpiece by deposit welding. US Patent 4621762,
1986.
[19] Doyle TE, Edmonds DP, McAninch MD. Method and apparatus for building a workpiece by deposit
welding. US Patent 4842186, 1989.
Y.M. Zhang et al. / Mechatronics 12 (2002) 37±53
53
[20] Prinz FB. Method and apparatus for fabrication of three-dimensional Metal articles by weld
deposition. US Patent 5207371, 1993.
[21] Dreizin EL, Felder W. Process and apparatus for micro-arc welding. US Patent 5616258,
1997.
[22] Buhrmaster CL, Clark DE, Smartt HB. Apparatus for gas-metal arc deposition. US Patent 5052331,
1991.