Statics: the study of bodies in equilibrium Dynamics: 1. Kinematics

Mechanics: the study of how bodies react to forces acting on them
1) Particles, Rigid Bodies 2) Deformable Bodies
Statics: the study of bodies in equilibrium
Dynamics:
1. Kinematics – concerned with the geometric aspects of motion
2. Kinetics - concerned with the forces causing the motion
Mechanics: the study of how bodies react to forces acting on them
1) Particles, Rigid Bodies 2) Deformable Bodies
Continuum Mechanics:
-Elasticity
-Fluid Mechanics
1
Mechanics: the study of how bodies react to forces acting on them
1) Particles, Rigid Bodies 2) Deformable Bodies
Gives rise to Ordinary
Differential Equations
Gives rise to Partial
Differential Equations
Solution of a mechanics problem usually requires solving a differential equation .
This course is about class 1: particles and rigid bodies
1- INTRODUCTION TO DYNAMICS
APPLICATIONS OF DYNAMICS: Particles
The motion of large objects, such as rockets, airplanes, or cars, can often be analyzed as if they were particles.
Why?
Typical question:
Can we predict the altitude, velocity and acceleration of this rocket as a function of time?
2
APPLICATIONS (continued)
A train travels along a straight length of track.
Can we treat the train as a particle?
Typical Question:
If the train accelerates at a constant rate, how can we determine its position and velocity at some instant?
APPLICATIONS (continued)
What about a baseball?
What is the correct model: particle, rigid body or deformable body?
Depends:
• A particle model will describe the approximate displacement when thrown or hit.
• A rigid body model will describe the effect of spin.
• A deformable body model will describe the transfer of energy when hit by a bat.
3
Goals of This Course:
• Develop modeling skills for realistic problems
• Apply a logical, mathematical framework to realistic problems
• Understand the role of force in motion
2- KINEMATICS OF PARTICLES
2/1 - 2/2- INTRODUCTION & RECTILINEAR MOTION
Objectives:
Introduce the kinematic quantities
(position, displacement, velocity, and acceleration) of a particle traveling along a straight path .
4
POSITION AND DISPLACEMENT
A particle travels along a straight-line path defined by the coordinate axis s.
The position of the particle at any instant, relative to the origin, O, is defined by the position vector r , or the scalar s. Scalar s can be positive or negative. Typical units for r and s are meters (m) or feet (ft).
Vector form: ∆ r = r’ - r
The displacement of the particle is defined as its change in position.
Scalar form: ∆ s = s’ - s
The total distance traveled by the particle, s
T
, is a positive scalar that represents the total length of the path over which the particle travels.
VELOCITY
Velocity is a measure of the rate of change in the position of a particle.
It is a vector quantity (it has both magnitude and direction). The magnitude of the velocity is called speed, with units of m/s or ft/s.
The average velocity of a particle during a time interval ∆ t is v avg
= ∆ r / ∆ t
The instantaneous velocity is the time-derivative of position.
v = d r /dt
Speed is the magnitude of velocity: v = ds/dt
Average speed is the total distance traveled divided by elapsed time:
(v sp
) avg
= s
T
/ ∆ t
5
ACCELERATION
Acceleration is the rate of change in the velocity of a particle. It is a vector quantity. Typical units are m/s 2 or ft/s 2 .
The instantaneous acceleration is the time derivative of velocity.
Vector form: a = d v /dt
Scalar form: a = dv/dt = d 2 s/dt 2
Acceleration can be positive (speed increasing) or negative (speed decreasing).
From the chain rule, the derivative equations for velocity and acceleration can be manipulated to get a ds = v dv
SUMMARY OF KINEMATIC RELATIONS:
RECTILINEAR MOTION
• Differentiate position to get velocity and acceleration.
v = ds/dt ; a = dv/dt or a = v dv/ds
• Integrate acceleration for velocity and position.
Velocity: v o v
∫ d v = o t
∫ a d t or v o v
∫ v d v = s o s
∫ a d s
Position: s o s
∫ d s = o t
∫ v d t
• Note that s o and v o represent the initial position and velocity of the particle at time t = 0.
6
CONSTANT ACCELERATION
The three kinematic equations can be integrated for the special case when acceleration is constant (a = a c
) to obtain very useful equations.
A common example of constant acceleration is gravity; i.e., a body freely falling toward earth. In this case, a c
= g = 9 .
81 m/s 2 downward. These equations are: v o v
∫
d v = o t
∫
a d t yields v = v o
+ a t s o
∫ s d s = o t
∫ v d t v o v
∫ v d v = s o s
∫ a d s yields yields s = s o
+ v o t + (1/2) a t 2 v 2 = (v o
) 2 + 2a (s s o
)
EXAMPLE
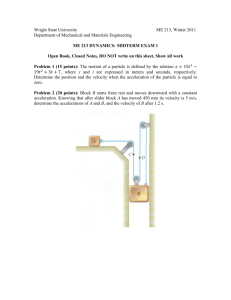
Given: A motorcyclist travels along a straight road at a speed of 27 m/s. When the brakes are applied, the motorcycle decelerates at a rate of -6t m/s 2 .
Find: The distance the motorcycle travels before it stops.
Plan: Establish the positive coordinate s in the direction the motorcycle is traveling. Since the acceleration is given as a function of time, integrate it once to calculate the velocity and again to calculate the position. Use the initial conditions to get final answer.
7
EXAMPLE (continued)
Solution:
1) Integrate acceleration to determine the velocity.
v t a = dv / dt => dv = a dt =>
∫ d v =
∫
( − 6 t ) d t v o o
=> v – v o
= -3t 2 => v = -3t 2 + v o
2) We can now determine the amount of time required for the motorcycle to stop (v = 0). Use v o
0 = -3t 2 + 27 => t = 3 s
= 27 m/s (why?).
3) Now calculate the distance traveled in 3s by integrating the velocity using s o
= 0: v = ds / dt => ds = v dt => s
∫ d s = t
∫
( − 3 t 2 +
=> s – s o
= -t 3 + v
=> s – 0 = -(3) 3 o t s o o
+ (27)(3) => s = 54 m v o
) d t
Assignment : Introductory Problem 2/4 or (2/3 in 6th edition)
P.S.:The problem numbers, page numbers, etc., refer to the 7th edition (SI units) of Meriam and Kraige (M&K), unless indicated otherwise.
8
Last Class:
1. Reviewed vectors.
2. Discussed kinematics of rectilinear motion of particles (position, velocity, acceleration).
This week:
1. Discuss kinematics of curvilinear motion (3-D) of particles.
2. See that there are different, but equivalent, ways of describing the kinematics.
3. Introduced special case of constant acceleration.
3. Look at examples of the different ways.
Week # 2: Lecture hour # 4-6
2/3- PLANE CURVILINEAR MOTION
2/4- RECTANGULAR COORDINATES & MOTION OF A PROJECTILE
2/5- NORMAL AND TANGENTIAL COMPONENTS (n-t)
Multi-dimensional kinematics
3 ways to keep track of a particle motion:
• Fixed axes (Cartesian coordinates). Measure position from a fixed origin.
• Moving axes (path variables). Axes move with the particle.
• Combination of the above .
The choice of method depends on the particular problem.
1
CURVILINEAR MOTION: RECTANGULAR COMPONENTS
(Sections 2/3 )
We first study a special case of fixed axes:
Cartesian coordinates
Later we will see moving axes.
APPLICATIONS of FIXED AXES
The path of motion of each airplane in this formation can be tracked with radar and their x, y, and z coordinates
(relative to a point on earth) recorded as a function of time.
Typical Problem:
How can we determine the velocity or acceleration of each plane at any instant?
And should they be the same for each aircraft?
2
APPLICATIONS (continued)
A roller coaster car travels down a fixed, helical path at a constant speed.
Typical Problem:
How can we determine its position or acceleration at any instant?
And if you are designing the track, why is it important to be able to predict the acceleration of the car?
REVIEW: POSITION AND DISPLACEMENT
A particle moving along a curved path undergoes curvilinear motion.
Since the motion is often three-dimensional, vectors are commonly used to describe the motion.
A particle moves along a curve defined by the path function, s.
The position of the particle at any instant is designated by the vector r = r (t).
Both the magnitude and direction of r may vary with time.
If the particle moves a distance ∆ s along the curve during time interval ∆ t, the displacement is determined by vector subtraction: ∆ r = r’ r
3
REVIEW: VELOCITY
Velocity represents the rate of change in the position of a particle.
The average velocity of the particle during the time increment ∆ t is v avg
= ∆ r / ∆ t .
The instantaneous velocity is the time-derivative of position v = d r /dt .
The velocity vector, v , is always tangent to the path of motion. Why?
The magnitude of v is called the speed. Since the arc length ∆ s approaches the magnitude of ∆ r as t → 0, the speed can be obtained by differentiating the path function ( v = ds/dt ). Note that this is not a vector!
REVIEW: ACCELERATION
Acceleration represents the rate of change in the velocity of a particle.
If a particle’s velocity changes from v to v’ over a time increment ∆ t, the average acceleration during that increment is: a avg
= ∆ v / ∆ t = ( v – v ’ )/ ∆ t
The instantaneous acceleration is the timederivative of velocity: a = d v /dt = d 2 r /dt 2
Note that the acceleration vector is not , in general, tangent to the path function.
4
2/4- RECTANGULAR COMPONENTS: POSITION
It is often convenient to describe the motion of a particle in terms of its x, y, z or rectangular components, relative to a fixed frame of reference .
The position of the particle can be defined at any instant by the position vector r = x i + y j + z k .
The x, y, z components may all be functions of time, i.e., x = x(t), y = y(t), and z = z(t) .
The magnitude of position vector is: r = (x 2 + y 2
The direction of r is defined by the unit vector: e r
+ z 2 ) 1/2
= (1/r) r
RECTANGULAR COMPONENTS: VELOCITY
The velocity vector is the time derivative of the position vector: v = d r /dt = d(x i )/dt + d(y j )/dt + d(z k )/dt
The unit vectors i , j , k are constant in magnitude and direction , so this equation reduces to where v x
•
= = dx/dt, v y v
•
= v x i + v y j
= = dy/dt, v z
+ v z
• k
The magnitude of the velocity vector is v = [(v x
) 2 + (v y
) 2 +(v z
) 2 ] 1/2
The direction of v is tangent to the path of motion.
5
RECTANGULAR COMPONENTS: ACCELERATION
The acceleration vector is the time derivative of the velocity vector (second derivative of the position vector): a = d v /dt = d 2 r /dt 2 = a x where a x
• v x x
/dt, a y i + a v y j + a y z k
•
= = = dv y
/dt, a z v
• z
•• z z
/dt
The magnitude of the acceleration vector is a = [(a x
) 2 + (a y
) 2 + (a z
) 2 ] 1/2
The direction of a is usually not tangent to the path of the particle.
EXAMPLE
Given: The motion of two particles (A and B) is described by the position vectors r
A r
B
= [3t i + 9t(2 – t) j ] m
= [3(t 2 –2t +2) i + 3(t – 2) j ] m
Find: The point at which the particles collide and their speeds just before the collision.
Plan: 1) The particles will collide when their position vectors are equal, or r
A
= r
B
.
2) Their speeds can be determined by differentiating the position vectors.
6
EXAMPLE (continued)
Solution:
1) The point of collision requires that r
A x
A
= x
B and y
A
= y
B
.
= r
B
, so x-components: 3t = 3(t 2 – 2t + 2)
Simplifying: t 2 – 3t + 2 = 0
Solving: t = {3 ± [3 2 – 4(1)(2)]
=> t = 2 or 1 s Which one?
1/2 }/2(1) y-components: 9t(2 – t) = 3(t – 2)
Simplifying: 3t 2 – 5t – 2 = 0
Solving: t = {5 ± [5
=> t = 2 or – 1/3 s
2 – 4(3)(–2)] 1/2 }/2(3)
So, the particles collide when t = 2 s. Substituting this value into r
A and r
B yields x
A
= x
B
= 6 m and y
A
= y
B
= 0, so r
A
=6 i and r
B
=?
EXAMPLE (continued)
2) Differentiate r
A and r
B to get the velocity vectors.
v
A
= d r
A
.
x
.
A i + y
.
A i + (18 – 18t) j ] m/s
At t = 2 s: v
A
= [3 i – 18 j ] m/s v
B
= d r
B
•
/dt = x
•
B i + y
B j = [(6t – 6) i + 3 j ] m/s
At t = 2 s: v
B
= [6 i + 3 j ] m/s ( why not equal?
)
Speed is the magnitude of the velocity vector.
v
A v
B
= (3 2
= (6 2
+ 18 2 ) 1/2
+ 3 2 ) 1/2
= 18.2 m/s
= 6.71 m/s
7
MOTION OF A PROJECTILE
An application of fixed Cartesian Coordinates
APPLICATION OF CARTESIAN COORDINATES:
PROJECTILE MOTION
Projectile motion can be treated as two rectilinear motions,
• one in the horizontal direction with zero acceleration
• the other in the vertical direction with constant acceleration
(i.e., gravity).
The red ball falls from rest, whereas the yellow ball is given a horizontal velocity.
Each picture in this sequence is taken after the same time interval. Both balls are subjected to the same downward acceleration since they remain at the same elevation at any instant.
The horizontal distance between successive photos of the yellow ball is constant since the velocity in the horizontal direction is constant.
8
KINEMATIC EQUATIONS: HORIZONTAL MOTION
Since a x
= 0, the velocity in the horizontal direction remains constant (v x
= v ox
) so the position in the x direction is determined by:
Why is a x x = x o
+ (v ox
)(t) equal to zero (assuming movement through the air)?
KINEMATIC EQUATIONS: VERTICAL MOTION
Since the positive y-axis is directed upward, a y
= -g
Application of the constant acceleration equations
. yields:
• v y
= v oy
– g t
• y = y o
+ (v oy
) t – ½ gt 2
• v y
2 = v oy
2 – 2g(y – y o
)
For any given problem, only two of these three equations can be used. Why?
9
Example 1
Given: v o and θ
Find: The equation that defines y as a function of x.
Plan: Eliminate time from the kinematic equations.
Solution: Using v x
= v o cos θ and v y
= v o sin θ
We can write: x = (v o cos θ )t or t = x v o cos θ y = (v o sin θ )t – ½ (g)t 2
By substituting for t: y = (v o sin θ )
( v o x cos θ
) ( )( ) o
2
Example 1 (continued):
Simplifying the last equation, we get: y = (x tan θ ) –
( g x 2
2v o
2
)
(1 + tan 2
θ )
The above equation is called the “path equation” which describes the path of a particle in projectile motion. The equation shows that the path is parabolic.
Why?
10
Plan: ???
GROUP PROBLEM SOLVING
Given: Skier leaves the ramp at θ
A
= 25 o the slope at B.
and hits
Find: The skier’s initial speed v
A
.
GROUP PROBLEM SOLVING
Given: Skier leaves the ramp at θ
A
= 25 o the slope at B.
and hits
Find: The skier’s initial speed v
A
.
Plan: Establish a fixed x,y coordinate system (in the solution here, the origin of the coordinate system is placed at A). Apply the kinematic relations in x and y-directions .
11
GROUP PROBLEM SOLVING (continued)
Solution:
Motion in x-direction:
Using x
B
= x
A
+ (v ox
)(t
AB
) t
AB
=
(4/5)100 v
A
(cos 25)
=
88 .
27 v
A
Motion in y-direction:
Using y
B
= y
A
+ (v oy
)(t
AB
) – ½ (g)(t
AB
) 2
-64 = 0 + v
A
(sin 25)
80 v
A
(cos 25)
– ½ (9 .
81)
88 .
27 v
A
2 v
A
= 19 .
42 m/s
CURVILINEAR MOTION:
NORMAL AND TANGENTIAL COMPONENTS (n-t)
(Section 2/5)
Moving axes (path variables).
12
NORMAL AND TANGENTIAL COMPONENTS
When a particle moves along a curved path, it is sometimes convenient to use coordinates other than Cartesian. When the path of motion is known , normal (n) and tangential (t) coordinates are often used .
In the n-t coordinate system, the origin is located on the particle (the origin moves with the particle).
NORMAL AND TANGENTIAL COMPONENTS (continued)
The t-axis is tangent to the path (curve) at the instant considered, positive in the direction of the particle’s motion.
The n-axis is perpendicular to the t-axis with the positive direction toward the center of curvature of the curve.
The positive n and t directions are defined by the unit vectors e n and e t
, respectively.
The radius of curvature, ρ , is the perpendicular distance from the curve to the center of curvature at that point.
The position of the particle at any instant is defined by the distance, s, along the curve from a fixed reference point.
13
NORMAL AND TANGENTIAL
COMPONENTS (continued)
The velocity vector is always tangent to the path of motion
(t-direction).
VELOCITY IN THE n-t COORDINATE SYSTEM
The magnitude is determined by taking the time derivative of the path function , s(t).
v = v e t where
.
v = s = ds/dt
Here v defines the magnitude of the velocity (speed) and e t defines the direction of the velocity vector.
Acceleration is the time rate of change of velocity:
.
.
a = d v /dt = d(v e t
)/dt = v e t
+ v e t
14
ACCELERATION IN THE n-t COORDINATE SYSTEM
.
Here v represents the change in
.
the magnitude of velocity and e t represents the rate of change in the direction of e t
.
After mathematical manipulation, the acceleration vector can be expressed as:
.
a = v e t
+ (v 2 / ρ ) e n
= a t e t
+ a n e n
ACCELERATION IN THE n-t COORDINATE SYSTEM
(continued)
There are two components to the acceleration vector: a = a t e t
+ a n e n
• The tangential component is tangent to the curve and in the direction of increasing or decreasing velocity.
.
a t
= v or a t ds = v dv ( using chain rule !)
• The normal or centripetal component is always directed toward the center of curvature of the curve. a n
= v 2 / ρ
• The magnitude of the acceleration vector is a = [(a t
) 2 + (a n
) 2 ] 1/2
15
Circular Motion
EXAMPLE PROBLEM
Given: Starting from rest, a motorboat travels around a circular path of
ρ = 50 m at a speed that increases with time, v = (0 .
2 t 2 ) m/s.
Find: The magnitudes of the boat’s velocity and acceleration at the instant t = 3 s.
Plan: The boat starts from rest (v = 0 when t = 0).
1) Calculate the velocity at t = 3s using v(t).
2) Calculate the tangential and normal components of acceleration and then the magnitude of the acceleration vector.
16
EXAMPLE (continued)
Solution:
1) The velocity vector is v = v e t by v = (0 .
2t 2 ) m/s. At t = 3s:
, where the magnitude is given v = 0 .
2t 2
2) The acceleration vector is a = a t
= 0 .
2(3) e t
+ a n e n
2 = 1 .
8 m/s
.
= v e t
+(v 2 / ρ ) e n
.
Tangential component: a t
At t = 3s: a t
.
= v = d( .
2t 2 )/dt = 0 .
4t m/s 2
= 0 .
4t = 0 .
4(3) = 1 .
2 m/s 2
Normal component: a n
At t = 3s: a n
= v 2 / ρ = (0 .
2t 2 ) 2 /( ρ) m/s 2
= [(0 .
2)(3 2 )] 2 /(50 ) = 0 .
0648 m/s 2
The magnitude of the acceleration is a = [(a t
) 2 + (a n
= 1 .
20 m/s 2
) 2 ] 1/2 = [(1 .
2) 2 + (0 .
0648) 2 ] 1/2
Assignment : Introductory Problem
(in 7th edition) or (in 6th edition)
2/60 (2/61)
2/77
2/104
(2/83)
(2/129)
17
Week # 3: Lecture hour # 7-8
2. Kinematics of Particles
Curvilinear Motion:
2/6- Polar Components (r -
θ
)
2/7 Space Curvilinear Motion
2/8 Relative Motion (Translating Axes)
CURVILINEAR MOTION:
2/6- POLAR COMPONENTS (r θ)
APPLICATIONS
C ylindrical coordinates are commonly used in cases where the particle moves along a helical curve.
z const: Polar coordinates
Typical Problem:
The boy slides down the slide at a constant speed of 2 m/s. How fast is his changing (i.e., what is z )?
1
POSITION (POLAR COORDINATES)
The location of A in polar coordinates is r = r e r
.
The radial direction, r , extends outward from the fixed origin, O , and the transverse coordinate,
θ , is measured counter-clockwise from the horizontal.
VELOCITY (POLAR COORDINATES)
The instantaneous velocity is defined as: v = d r /dt = d(r e r
.
v = r e r
+ r d e r dt
)/dt
Using the chain rule: d e r
/dt = (d e r
/d θ )(d θ /dt) d e r
/d θ = e
Therefore:
θ v so d
= r e e r r
.
+ r θ e
θ
θ/ dt) e
θ called the radial component , and
.
r θ, called the transverse component . The speed of the particle at any given instant is the sum of the squares of both components or v =
.
(r θ ) 2
.
+ ( r ) 2
2
ACCELERATION (POLAR COORDINATES)
The instantaneous acceleration is defined as: a = d v /dt = (d/dt)(
.
r e r
+ r
.
θ e
θ
)
But: d e
θ
/dt= - d θ /dt u r.
So the acceleration can be expressed as
..
a = (r – r θ
.
2 ) e
..
The term (r – r θ
.
2 r
+ (r
..
θ
. .
+ 2r θ ) e
θ
) is the radial acceleration or a r
.
..
. .
The term (r θ + 2r θ ) is the transverse acceleration or a
θ
..
.
The magnitude of acceleration is a = (r – r θ 2
..
. .
) 2 + (r θ + 2r θ ) 2
2/7- SPACE CURVILINEAR MOTION
CYLINDRICAL COORDINATES (rθ− z)
In the figure: u r
= e r
, u
θ
= e
θ
, u z
= k
If the particle P moves along a space curve, its position can be written as r
P
= R = r e r
+ z e z
Velocity:
Taking time derivatives and using v the chain rule ( e z
P
.
= r e r constant):
.
.
+ r θ e
θ
+ z e z
Acceleration: a
P
..
.
= (r – r θ 2 ) e r
..
. .
..
+ (r θ + 2r θ ) e
θ
+ z e z
3
EXAMPLE
Given: r = 5 cos(2 θ ) [m]
θ = 3t 2 [rad/s]
θ o
= 0
Find: Velocity and acceleration at
.
..
Plan: Apply chain rule to determine r and r and evaluate at θ = 30°.
t
.
∫ ∫ t
Solution: 2 dt = t 3 t o
= 0 0
At θ = 30°, θ
π
6
3 .
Therefore: t = 0.806 s.
.
θ = 3t 2 = 3(0.806) 2 = 1.95 rad/s
EXAMPLE (continued)
..
θ = 6t = 6(0.806) = 4.836 rad/s 2 r = 5 cos(2 θ ) = 5 cos(60) = 2.5m
.
.
r = -10 sin(2 θ ) θ = -10 sin(60)(1.95) = -16.88 m/s
..
r = -20 cos(2 θ ) θ
.
2
..
– 10 sin(2 θ ) θ
= -20 cos(60)(1.95) 2 – 10 sin(60)(4.836) = -80 m/s 2
Substitute in the equation for velocity
.
v = r e r
+ r
.
θ e
θ v = -16.88
e r
+ 2.5(1.95) e
θ v = (16.88) 2 + (4.87) 2 = 17.57 m/s
4
EXAMPLE (continued)
Substitute in the equation for acceleration: a
..
= (r – r
.
θ 2 ) e r
..
. .
+ (r θ + 2r θ ) e
θ a = [-80 – 2.5(1.95) 2 ] e r
+ [2.5(4.836) + 2(-16.88)(1.95)] e
θ a = -89.5
e r
– 53.7
e
θ m/s 2 a = (89.5) 2 + (53.7) 2 = 104.4 m/s 2
2/8- RELATIVE MOTION (TRANSLATING AXES) r
A
= r
B
+ r
A/B
A/B means “A relative to B” or
“A with respect to B”
Differentiation position vector with respect to time gives
OR v
A
= v
B
+ v
A/B
Acceleration a
A
= a
B
+ a
A/B
5
Sample Problem 2/14:
Car A is accelerating in the direction of its motion at the rate of
1.2 m/s 2 . Car B is rounding a curve of 150m radius at a constant speed of 54 km/h. Determine the velocity and acceleration which car B appears to have to an observer in car A if car A has reached a speed of 72 km/h for the positions represented.
Solution: choose non-rotating reference axes attached car to A since the motion of B with respect to A is considered.
54 km/h = 15 m/s
72 km/h = 20 m/s
Velocity
Using law of sine or cosine or using vector algebra
V
B/A
= 18.03 and Ɵ = 46.1
Acceleration a
A is given (1.2 m/s 2 ) a
B is constant a n
= v 2 /p
= 15 2 /150 = 1.5 m/s 2
(a
B / A
) x
(a
B / A
) y
= 1.5cos30 – 1.2 = 0.099 m/s 2
= 1.5sin30 = 0.750 m/s 2 a
B / A
= (0.099
2 + 0.75
2 ) 1 / 2 = 0.757 m/s 2
6
Using sine rule :
Assignment : Introductory Problem
2/131
2/183 or or
(2/137 in 6th Edition)
(2/193 in 6th Edition)
β = 97.5
7