Document
advertisement

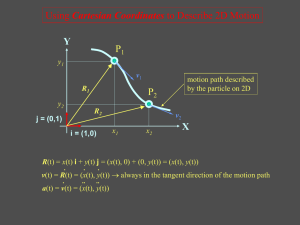
Kinematics Curvilinear Motion Johannes Kepler Overview • Curvilinear Motion: Normal and Tangential Components • Curvilinear Motion: Cylindrical Coordinates Curvilinear Motion: Normal and Tangential Components Introduction • For a particle moving along a known curvilinear path • If we take the position at an instant as the origin • We can define coordinate axes tangential, and normal to the path Normal and Tangential Components • Consider the particle at s from a fixed point O • t-axis is tangent to the curve. n-axes is normal to the curve O • ut and un are the respective unit vectors and are perpendicular to each other O’ n s un ut Position t Normal and Tangential Components • We may view the path as consisting of a series of infinitesimally small arcs of length ds, radius of O’ O’ curvature ρ, with ds center O’ ρ ρ ρ ρ • The n-axis is positive ρ ρ O O’ towards the center of ds curvature. ds u • The plane containing the n Radius of curvature and t axes is called the embracing or osculating plane t Normal and Tangential Components Velocity • Direction: always tangential to the path • Magnitude: Since s = s(time) ds so v vut v O’ ρ dt ρ v where v s Velocity Normal and Tangential Components Acceleration • As can be seen velocity is continually changing as the particle traverses the curved path • Acceleration is the rate of change velocity with respect to time a v dv dt a vut O’ d (vut ) dt vu t dθ ρ ρ un ds u’t ut Normal and Tangential Components • Lets us redraw the velocity unit vectors at the infinitesimal scale u't ut dut dut ut d un dθ u’t ut dut and for small angles or dut d ut but note that dut is in the direction of a unit vector in the normal direction, so we can replace the unit vector, thus dut d un • And the derivative with respect to time becomes u t u n Normal and Tangential Components • From the properties of an arc we know that ds = ρ dθ (go back two slides) so likewise, with respect to time, s so u t u s n un v un Normal and Tangential Components • We can consider acceleration as having two components, one tangential and the other normal a at ut anun • Comparing with original equation (Slide 7) O’ or at v at ds vdv and an v 2 an a P at Acceleration Normal and Tangential Components • The magnitude of the acceleration is therefore O’ a 2 t a 2 n a an a P at Acceleration Conclusion • Examples Curvilinear Motion: Cylindrical Coordinates • In some cases the motion of a particle is constrained on a path amenable to analysis using cylindrical coordinates • If the motion is restricted to a plane, then we can use polar coordinates Abraham de Moivre Polar Coordinates • Consider a system where we locate a particle by a radial coordinate r, which extends from an origin O, and an angle θ (also called transverse coordinate) in radians measured counterclockwise θ form a fixed reference line to u the axis of r. u r • uθ and ur are unit vectors in θ the directions of increasing O θ and r respectively Position r θ r Position & Velocity • At any instant, we can define the position vector of the particle as r rur θ • The instantaneous velocity is the time derivative of r v r • u r ? rur ru r uθ r θ O Position r ur Velocity • A change in r over a time interval ∆t will not result in a change of the unit vector ∆r • Rather a change ∆θ over an interval ∆t will cause a change ∆r u'r ur ur • For small angles and ur u ur Velocity u r ur t lim t 0 lim t t 0 u u u r • So we can rewrite instantaneous velocity in component form as v where vr ur vu v vθ vr v r r r O θ Velocity vr Velocity • The speed (or magnitude of velocity) is therefore given by v r 2 2 r Acceleration • Differentiating the instantaneous velocity equation yields the instantaneous acceleration r u r u • We must now determine u a v rur r u r r u • Consider a small change ∆θ over an interval ∆t u' u for small angles u u u u but ∆uθ acts in the negative ur direction, so we can change the unit vector for its direction Acceleration u • thus u ur u t lim t u 0 u lim t 0 t ur r So we can rewrite instantaneous velocity in component form as a where ar a ar ur r r 2 r 2r a aθ au r O θ Acceleration ar Acceleration • The term is called the angular acceleration d2 dt 2 d d dt dt • The magnitude of the acceleration a r r 2 2 2 r 2r • The acceleration is generally not tangential to the path. Cylindrical Coordinates • If the particle moves along a 3-dimensional curve (also called a space curve) then we can apply cylindrical coordinates to analyze the motion Cylindrical Coordinates • We can extend the concept of polar coordinates to 3-dimnesions to create cylindrical coordinates r, θ, and z rP v a rur zu z rur r u (r r 2 ) ur uz rP z O zu z (r 2r ) u θ zu z r Questions & Comments • Examples