AIAA 2009-5723
AIAA Atmospheric Flight Mechanics Conference
10 - 13 August 2009, Chicago, Illinois
Parameter Identification for Application within
a Fault-Tolerant Flight Control System
Kerri Phillips 1 , Giampiero Campa 2 , Srikanth Gururajan 3 ,
Brad Seanor 4 , Marcello R. Napolitano5, Yu Gu 6 ,Mario Luca Fravolini 7
Department of Mechanical and Aerospace Engineering, West Virginia University, Morgantown, WV, 26506-6106
PF
FPT
F
T
FPT
FPT
TPF
, FPT
FP
FPT
FPT
This paper presents the results of a parameter identification study for the mathematical
model of the WVU YF-22 unmanned research aircraft under both nominal and failure
conditions to simulate malfunctions on primary control surfaces. Specifically, nominal and
failure conditions for both linear and non-linear mathematical models were developed using
flight data acquired from pilot and automated computer-injected maneuvers. From analysis,
the stability and control derivatives were extracted to determine the aerodynamic forces and
moments. The aerodynamic derivatives were introduced into a simulation model
implemented within a Simulink-based environment; studies were conducted to validate the
accuracy of the identified models. Initial simulation results highlight the potential for the
development of the nominal and failure non-linear mathematical models from flight data.
Keywords: Parameter Identification, Aircraft System Identification, Fault-Tolerant Flight Control
Nomenclature
a
A
b
B
C
c
H
i
I
J
m
p
q
1
TP
PT
2
TP
PT
3
TP
PT
4
TP
PT
5
TP
PT
6
TP
PT
7
TP
PT
=
=
=
=
=
=
=
=
=
=
=
=
=
2
linear acceleration (m/s )
decoupled (failure) state matrix
wing span (m)
decoupled (failure) input matrix
aerodynamic coefficient
mean aerodynamic chord (m)
altitude (m)
surface deflection (deg)
moment of inertia (kg m2)
product of inertia (kg m2)
aircraft mass (kg)
roll rate (deg/s)
pitch rate (deg/s)
Ph.D. Student, Dept. Mechanical and Aerospace Engineering, ERC 117C, PO Box 6106 West Virginia University,
Morgantown, WV, USA. 26506-6106. Email: kphilli2 at mix.wvu.edu, AIAA Member.
Research Assistant Professor, Dept. of Mechanical and Aerospace Engineering, ESB 535, PO Box 6106 West
Virginia University, Morgantown, WV, USA. 26506-6106, Email: giampiero.campa at mail.wvu.edu.
Post-Doctoral Research Fellow, Dept. of Mechanical and Aerospace Engineering, ERC 121, PO Box 6106 West
Virginia University, Morgantown, WV, USA. 26506-6106. Email: srikanth.gururajan at mail.wvu.edu, AIAA
Member.
Research Assistant Professor, Dept. of Mechanical and Aerospace Engineering, ESB 535, PO Box 6106 West
Virginia University, Morgantown, WV, USA. 26506-6106, Email: brad.seanor at mail.wvu.edu, AIAA Member.
Professor, Dept. of Mechanical and Aerospace Engineering, ESB 519, PO Box 6106 West Virginia University,
Morgantown, WV, USA. 26506-6106, Email: marcello.napolitano at mail.wvu.edu, AIAA Member.
Research Assistant Professor, Dept. of Mechanical and Aerospace Engineering, ESB 535, PO Box 6106 West
Virginia University, Morgantown, WV, USA. 26506-6106, Email: yu.gu at mail.wvu.edu.
Research Associate Professor, Dept. of Electrical and Information Engineering, University of Perugia, Perugia,
Italy. Email: fravolini at diei.unipg.it.
1
American Institute of Aeronautics and Astronautics
Copyright © 2009 by the American Institute of Aeronautics and Astronautics, Inc. All rights reserved.
q
r
S
T
V
=
=
=
=
=
dynamic pressure (PSI)
yaw rate (deg/s)
wing surface area (m2)
thrust (N)
velocity (m/s)
Greek Letters
α
= angle of attack (deg)
β
= angle of sideslip (deg)
δ
= control surface deflection (deg)
θ
= pitch angle (deg)
= roll angle (deg)
ψ
= yaw angle (deg)
ρ
= air density (kg/m3)
Subscripts
A
=
D
=
H
=
l
=
L
=
m
=
n
=
R
=
xx
=
xz
=
Y
=
yy
=
zz
=
aileron
drag
stabilator
rolling moment
lift, left
pitching moment
yawing moment
rudder, right
about the x-axis (body)
about the x and z axes (body)
side force
about the y-axis (body)
about the z-axis (body)
Acronyms
ALG
=
ALT
=
BLG
=
BLT
=
ECU
=
FCS
=
FTR
=
GUI
=
IMU
=
NRLS
=
OBC
=
OBES
=
PDF
=
PID
=
PWM
=
RTAI
=
RTW
=
VL
=
WVU
=
Longitudinal state matrix
Lateral-directional state matrix
Longitudinal input matrix
Lateral-directional input matrix
Engine control unit
Flight control system
Fourier Transform Regression
Graphical user interface
Inertial measurement unit
Normalized Recursive Least Squares
On-board computer
On-board excitation system
Power density function
Parameter identification
Pulse width modulation
Real Time Application Interface
Real-Time Workshop
Virtual leader
West Virginia University
2
American Institute of Aeronautics and Astronautics
I. Introduction
T
he use of unmanned aircraft for validation and verification of flight control laws has become an appealing
option among researchers due to the high cost and risks associated with similar manned flight testing programs.
Researchers at West Virginia University (WVU) have utilized a YF-22 research aircraft model for experimentally
testing a variety of fault-tolerant flight control laws pertaining to the specific problem of sensor and actuator
failures1,2. Originally a linear mathematical model was implemented for control law design at nominal flight
conditions; however, the development of a more accurate non-linear mathematical model was found necessary for
predicting aircraft behavior following control surface failures for the purpose of designing a new class of faulttolerant control laws. The successful implementation of this non-linear model will represent an essential step within
the current WVU NASA EPSCoR project for the design of fault-tolerant control laws to handle both sensor and
actuator failures1.
The failure of primary control surfaces has historically been recognized as one of the main causes of accidents
for both military and civilian aviation. Examples of accidents involving primary control surface failures have
included: USAir Flight 427 and United Airlines Flight 585, both caused by a faulty servo valve locking the rudder at
its blowdown limit3,4, and United Airlines Flight 232, which had a catastrophic right engine failure that resulted in
debris rupturing the hydraulic lines required to control the right elevator 5. While triple or quadruple redundancy is
typically employed for sensors, actuator redundancy for these surfaces is rarely available. In the case of USAir
Flight 427, the locked rudder caused the Boeing 737 to crash within 28 s of the failure, lacking the sufficient time
for the pilots to identify what type of failure had occurred. During the accident investigation, Boeing test pilots
involved in both flight and simulator testing revealed that “successful recovery required immediate flight crew
recognition of the upset event and subsequent prompt control wheel inputs to the full authority of the airplane’s roll
control limits and pitch flight control inputs to maintain a speed above the crossover airspeed”3. With the
application of fault-tolerant flight control systems, pilots in similar circumstances may be aided in the failure
identification and accommodation process, possibly providing them sufficient time to compensate for a locked
surface.
In providing such an application, the development of an improved mathematical model through a more
comprehensive modeling effort is required better understanding of the aircraft dynamics during post failure
conditions. Specifically, a failure involving a locked actuator does not affect the aerodynamic characteristics of the
control surface; however, under failure conditions the aircraft mathematical model must include the contribution of
each left and right surface6, since individual control surface deflections affect both the longitudinal and lateraldirectional dynamic responses of the aircraft. For example, individual left or right stabilator excitation effects must
be included in the determination of the lateral-directional aerodynamic derivatives since roll and yaw responses will
develop, in addition to a pitching moment, following a stabilator failure. As a result, a new set of stability and
control derivatives are introduced based on the modeling of the individual left and right control surface inputs. The
coupling of the longitudinal and lateral-directional dynamics is represented by separating the corresponding terms in
the aerodynamic modeling equations into left and right control surface components and including their individual
effects. Thus, the deflections of all six individual control surfaces must be accounted for in the modeling of the
longitudinal and lateral-directional aerodynamic forces and moments.
This paper is organized as follows: the next section describes the WVU YF-22 research platform, followed by
sections describing the design of the flight experiment for parameter identification (PID) purposes as well as the
algorithms used for the system identification, followed by a description of the simulation results and general
conclusions. Each of the sections highlights a critical component for the PID process from experimental flight data.
II. WVU YF-22 Research UAVs
A. Aircraft System
The YF-22 research aircraft, shown in Fig. 1, was designed, constructed, and instrumented by researchers at
WVU. The aircraft is an approximate 1/8 semi-scale model of the full size aircraft. The aircraft has a 2.3 m length
with a 2.0 m wingspan; the takeoff weight is approximately 23 kg, including an approximate 5 kg electronic
payload. The payload consists of a PC-104 form factor, customized electronic boards, a complete suite of sensors,
and a GPS receiver. A miniature turbine engine provides 125 N of thrust with a fuel capacity of approximately 3.5 L
of jet fuel7 for a mission length of approximately 12 minutes.
3
American Institute of Aeronautics and Astronautics
Figure 1. WVU YF-22 Aircraft
The primary control surfaces – ailerons, stabilators, flaps, and rudders – are all commanded using digital servos. An
additional digital servo is used for the braking system while the jet engine is controlled by an Engine Control Unit
(ECU). The interested reader is referred to Refs. 7 and 8 for an extensive description of the research aircraft
hardware and its payload systems.
B. On-Board Computer
The avionics system is based on a PC-104 computer system, consisting of a CPU module, a Data Acquisition
(DAQ) module, and a power supply module interfaced with two customized circuit boards – the controller board and
the interface board. The operating system and flight control laws are stored on a 64 MB compact flash card, which is
then interfaced with an IDE compact flash adapter. The top portion of Fig. 2 shows the location of the
instrumentation package within the cargo bay while the bottom portion of Fig. 2 shows the internal PC-104
assembly of the on-board computer (OBC)7.
Figure 2. On-Board Instrumentation Package7
The CPU is a low-power computer (MSI-CM588) with a 6x86 300 MHz processor. The DAQ card (Diamond-MM32-AT) features 32 analog input channels with 16-bit resolution and 24 digital I/O channels. The interface board is
used for linking individual sensor outputs to a specific data acquisition channel which, in turn, re-routes power from
the on-board power supply (Jupiter-MM-SIO) to the sensors. This connection scheme does not include the vertical
gyro and the GPS receiver, which are powered via a separate power supply7,8.
4
American Institute of Aeronautics and Astronautics
The customized controller board was designed as the hub for the flight control system. The controller board
includes the following functionality:
1. Receiving control signals from the OBC, and translating them into Pulse Width Modulation (PWM) signals;
2. Receiving PWM control signals from the radio receiver;
3. Dispatching the control signals from the OBC or the radio receiver to the individual servos (according to
the current operation mode of the aircraft).
C. Sensors and Communication Hardware
The WVU YF-22 vehicle is instrumented with a complete suite of sensors for measuring a variety of flight data
parameters. It was experimentally evaluated that the noise for all of the sensors could be approximated to follow a
Gaussian PDF. The ‘3’ values from ground tests for each of the vehicle sensors are provided below. A list of
sensors for the research aircraft includes7,8:
Inertial Measurement Unit (Crossbow IMU400), providing 12-bit measurements for the accelerations ax, ay,
az (range ±4 g, with 3 = 0.06 g), and the angular rates p, q, and r (range ±90°/s with 3 = 1°/s);
Vertical gyro (Goodrich-VG34), providing measurements for the pitch and roll Euler’s angles ( and ) with
ranges of ±60° and ±90° respectively and 3 = 0.35°;
GPS receiver (Novatel-OEM4), providing measurements for x, y, z, Vx, Vy, Vz with respect to an earth
reference frame, with 3 = 0.7 m for the positions and 3 = 0.1 m/s for the velocities;
Potentiometers for the primary control surfaces (10 k each, under a 12 V supply), providing measurements
for iH, A, R, with ranges of [-1, 8]°, [-10, 10]°, and [-7, 7]° and with 3 = 0.6°, 0.3°, and 0.15°
respectively;
Air Data Probe, (SpaceAge© Inc. Mini Air Data Boom), providing measurements of flow angles and ,
with ranges of ±30° and 3 = 0.15°;
Absolute and Differential pressure sensors (SenSym ASCX15AN and ASCX01DN), with ranges of [0-15]
and [0-1] PSI and 3 = 0.06 and 0.0015 PSI respectively. Both sensors were connected to the nose probe
providing measurements for H and V;
Temperature sensor (Thermistor under a 5 V supply).
D. Electro-Magnetic Interference (EMI)
Special care was used for the design, manufacturing, and installation of both the customized and ‘off-the-shelf’
components with the goal of avoiding or mitigating EMI problems. In particular, aluminum enclosures were
designed and manufactured for shielding most of the hardware components, and ferrite RF chokes were inserted
along both power and signal cables. Once assembled, the payload systems were then evaluated with a spectrum
analyzer to assist in addressing EM interference. This analysis validated that the EMI concerns had been properly
addressed; in fact, only a few additional RF chokes were found to be necessary to eliminate residual EMI sources7,8.
E. Data Acquisition Software
The on-board computer features software that serves to execute the flight control scheme. The operating system
was based on a Linux kernel (Version 2.6.9), patched with the Real Time Application Interface (RTAI, Version 3.2),
allowing the execution of the flight control software with strict timing constraints. Due to the constraints of the onboard storage, the RTAI patched kernel was compiled with a minimum amount of features and Busybox software,
which provides the required Linux utilities.
The FCS was designed and implemented using the Matlab/Simulink® environment to perform data acquisition,
communication, execution of control laws, and implementation of the OBC-generated control commands16. This
enabled the OBC to collect and store information from the aircraft sensors during the flight test, respond to pilot
commands, and utilize autonomous capabilities, all of which were integral components for performing this
parameter identification study. Real-Time Workshop (RTW) was then used to generate the real-time target source
files, and the executables were compiled on a development host and transferred to the on-board computer using a 64
MB flash card.
III. Flight Testing Experiments
Flight tests were conducted at the WVU flight testing facility located at the Louis-Bennett Airfield at WVU
Jackson’s Mill near Jane Lew, WV, which features a 3,300 ft. paved runway. Fig. 3 shows an aerial image from
Google Earth of the facility.
5
American Institute of Aeronautics and Astronautics
Figure 3. Aerial ‘Google Earth’ View of WVU Jackson’s Mill (Louis-Bennett Airfield)
A typical PID flight test lasts approximately 15 minutes and consists of three different segments: takeoff and
trim, experimental maneuvers, and landing. An experimental segment includes approximately 10 individual legs of
straight and level flight, each lasting about 10 s, during which PID maneuvers are injected. During the experimental
maneuvers, the aircraft performed at an average altitude of 120 m from the ground with an average airspeed of 42
m/s.
The PID flight experiments were divided into the following phases:
• 1st phase: updates to the on-board software;
• 2nd phase: ‘pilot-injected’ PID maneuvers;
• 3rd phase: ‘on-board computer-injected’ PID maneuvers.
The following sections describe in detail the three phases. Within the 1st phase, the on-board flight software was
updated and included: operating system software, schemes for manual injection of failures on individual control
surfaces, and schemes for the on-board computer-injected PID maneuvers as well as their evaluation of via ground
tests.
Within the 2nd phase, PID maneuvers were injected by the pilot for both nominal and ‘failure’ conditions. To
excite the longitudinal dynamics, stabilator doublets were injected by the pilot while aileron doublets and
rudder/aileron doublet combinations were injected to excite the lateral-directional aircraft dynamics. In the nominal
mode, the pilot had complete authority over all control surfaces, while in the ‘failure’ mode, flights were conducted
with the on-board computer inducing failures on individual control surfaces. Specifically, for the longitudinal case,
the left stabilator was locked at the trim position, allowing only for the deflection of the right stabilator. Similarly,
for the lateral-directional case, the aileron and rudder/aileron combination doublets were performed with the left
aileron locked at the trim position.
During the 3rd phase, flight tests were conducted with PID maneuvers injected by the On-Board Excitation
System (OBES)9,10. For this specific set of flights, the OBES injected doublet maneuvers, including stabilator,
aileron, and rudder/aileron doublet combinations. The OBES was configured in the vehicle software for
coordination with an existing “Virtual Leader” (VL) scheme, originally employed towards the goals related to a
formation flight demonstration7,8 with the YF-22 vehicles. The previously used formation flight VL scheme allowed
for detailed testing of the formation control laws prior to flying an actual 2-aircraft configuration. The original
experiment consisted of a single aircraft tracking a trajectory for a VL, which was essentially a flight path previously
recorded by one of the aircraft. The actual aircraft would follow at a specified position behind the VL trajectory,
which was loaded into the on-board computer8. This VL methodology was implemented on the VL scheme designed
for PID flight tests. The modified VL scheme consisted of an artificial GPS track and aircraft angular orientation
sent to the on-board controller. This track then provided the GPS position and velocity information to the aircraft
when the on-board systems were switched into autonomous mode. For this particular configuration, the aircraft
software was designed to track the position of the VL. The VL GPS track was artificially generated and designed to
have two 650 m straight leg segments in parallel to the runway, during which specific PID maneuvers were injected
6
American Institute of Aeronautics and Astronautics
by the on-board computer, and two semicircular turns at the end of each straight leg. Fig. 4 shows the artificial VL
path with the runway located along the y-axis
Figure 4. Virtual Leader Flight Path (m)
The OBES was designed to inject a doublet on a designated pair of control surfaces at specific points in the flight
path. Initial test flights were conducted using the OBES software by injecting stabilator, aileron, and rudder/aileron
doublet combinations separately on the “healthy” aircraft with the goal of exciting the longitudinal and lateraldirectional dynamics. When designing the OBES maneuvers, the doublet amplitudes and durations were selected to
be similar to those injected manually by the pilot during previous test flights. Specifically, with respect to the lateraldirectional dynamics, the period of the Dutch Roll, as observed from previously recorded flight data, was used in
programming the rudder/aileron combination maneuver. Therefore, both rudder and aileron doublets were
sequenced with a frequency near the Dutch Roll natural frequency with the goal of producing an optimal excitation
for PID purposes11. As with pilot-injected maneuvers, the OBES-injected doublets were also completed with the
controller system locking the left corresponding control surface at trim to simulate a failure. Note that no failures
were injected on either of the rudder control surfaces. Table 1 provides an overview of the flight tests conducted
during the 2008 and 2009 flight seasons.
Date(s)
9/16/2008
10/11/2008
10/18/2008
11/1/2008
11/4/2008
05/22/2009
05/31/2009
Table 1. Flight Testing Overview
Flight Testing Activities
Flight #
Flight Description
Pilot-Injected Elevator Doublet and Rudder/Aileron Combination Doublet; Pilot#1
Injected Elevator Doublets with Left Elevator Failure at Trim
Pilot-Injected
Elevator Doublet and Aileron Doublet; Pilot-Injected Aileron
#2
Doublets with Left Aileron Failure at Trim
#1
Preliminary Virtual Leader Test Flight
#2
OBES-Injected Elevator Doublets
#1
OBES-Injected Rudder/Aileron Combination Doublets
#2
OBES-Injected Elevator Doublets
#1
#1
#2
#1
#2
#1
OBES-Injected Elevator Doublets with Left Elevator Failure at Trim
OBES-Injected Rudder/Aileron Doublet Combinations with Left Aileron Failure
at Trim
OBES-Injected Aileron Doublet Combinations with Left Aileron Failure at Trim
Pilot-Injected Elevator, Aileron, and Rudder/Aileron Doublets
Pilot-Injected Elevator, Aileron, and Rudder/Aileron Doublets
Pilot-Injected Elevator Doublets with Left Elevator Failure at Trim
7
American Institute of Aeronautics and Astronautics
IV. System Identification
The system identification process was divided into four sequential phases:
1.
Identification of the nominal linear model;
2.
Identification of the nominal non-linear model;
3.
Identification of the decoupled linear model;
4.
Identification of the decoupled (failure) non-linear model.
‘Nominal’ in this case refers to a healthy aircraft where all of the control surfaces are functioning as expected, so
their contribution to the model is considered as a pair. ‘Decoupled’ refers to the individual control surface
contributions to the aircraft model, i.e. left and right aileron contributions.
A. Nominal Linear Identification
The Graphical User Interface (GUI) of the Matlab System Identification Toolbox® was used for the nominal
linear identification and validation processes. Short segments of flight data containing doublet maneuvers were used
to evaluate both the longitudinal and lateral-directional cases. For longitudinal identification, the stabilator
deflection and the corresponding longitudinal states, angle of attack () and pitch rate (q), were used. As determined
in a previous study7 the “n4sid” function was selected for determining the nominal longitudinal linear model. This
function estimates a state-space model using a subspace-based identification method12. For lateral-directional
identification, both aileron and rudder deflections and the corresponding lateral-directional states, angle of sideslip
(), roll rate (p), and yaw rate (r), were used. An additional function, the iterative prediction-error minimization14
method “pem” – a “method based on estimating the parameters of a linear model by minimizing a robustified
quadratic prediction error criterion with an iterative search algorithm”13 – was utilized. Both the “pem” and
“n4sid” routines were evaluated with several sets of lateral-directional flight data to identify the method producing
the most consistent results. The accuracy of the models was verified using the System Identification Toolbox®
simulated model output visualization option. The visualization facilitates the comparison of the simulated model
output to the measured flight data; this process identified the “pem” method as the routine which could provide the
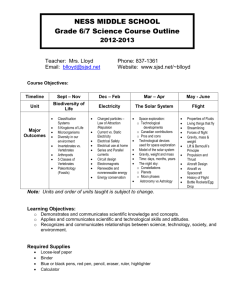
most accurate results for lateral-directional PID. Figs. 5 and 6 provide sample data segments used in the linear
longitudinal and lateral-directional PID process, respectively.
Selected Data Segment for Identification
Stabilator Deflection
Angle of Attack
Pitch Rate
40
iH (deg), q (deg/sec), (deg)
30
20
10
0
-10
-20
-30
-40
Aileron Deflection
Rudder Deflection
Angle of Sideslip
Roll Rate
Yaw Rate
100
80
60
40
20
0
-20
-40
-60
-80
-100
-50
478.5
Selected Flight Test Data for Identification
a (deg), r (deg), (deg), p (deg/s), r (deg/s)
50
479 479.5
480 480.5
481 481.5 482
Time (sec)
482.5 483 483.5
Figure 5. Flight Data Segment used for Longitudinal
Linear Model Identification
444
445
446
447
Time (sec)
448
449
450
Figure 6. Flight Data Segment used for LateralDirectional Model Identification
In addition to the longitudinal and lateral-directional states identified using the System Identification Toolbox®, V ,
, and were also derived for a more complete linear model. While and were identified as the pitch rate and
roll rate, respectively, V was derived by using contributions from the angle of attack, stabilator deflection, and
vehicle velocity. The resulting continuous time longitudinal and lateral-directional linear models were identified as:
8
American Institute of Aeronautics and Astronautics
V 0.2835 -23.0959
0
0.1711 V -20.1681
5.6878 0.5931
0 2.1959
0
iH
q 0
53.7829 1.996
0 q 21.2428
0
1
0
0
0
0.9974
0.2201 1.0146 0.2366 0.4644 0.0322
48.8486
5.4624 5.5935
0 p 47.7787 17.8867 a
p
r 17.7651 1.6375 2.3993
0 r 1.4142 25.8652 r
0
1
0
0
0
0
(1)
(2)
The corresponding eigenvalues along with the damping, natural frequency, and time constant values for the
represented dynamic modes are listed in Table 2.
Table 2. Eigenvalues, Damping, and Natural Frequencies of WVU YF-22 Aircraft (Nominal)
Dynamic Mode
Eigenvalues
Damping Natural Frequency (rad/s)
-3.8419 ± 5.3377i
0.5842
6.5766
Short Period
-0.8933 ± 5.7625i
0.1532
5.8313
Dutch Roll
-5.0532
Roll
The linear models were then used to derive the nominal non-linear mathematical model.
B. Nominal Non-Linear Aircraft Model
The non-linear aircraft mathematical model is described by the following generalized set of non-linear
differential equations 15,16,17,18,19.
1 1
1
V ( SV 2 C D cos SV 2 CY sin T cos cos )
m 2
2
g (sin cos cos cos sin sin cos cos sin cos )
1
1
[ SV 2 CL T sin mg (cos cos cos sin sin )]
mV cos 2
q ( p cos r sin ) tan
(3)
(4)
1 1
1
[ SV 2 CD sin SV 2 CY cos T cos sin
mV 2
2
mg (sin cos sin cos sin cos cos cos sin sin )] p sin r cos
(5)
p2
p
qr
bCl
q M q 2 M pr qSM cC
1
2
0
m
r2
r
pq
bCn
(6)
q cos r sin
q sin sec r cos sec
p q sin tan r cos tan
x V [cos cos cos cos sin (sin sin cos cos sin )
cos sin (cos sin cos sin sin )]
y V [cos cos cos sin sin (sin sin sin cos cos )
cos sin (cos sin sin sin cos )]
9
American Institute of Aeronautics and Astronautics
(7)
(8)
(9)
(10)
(11)
h V (cos cos sin sin sin cos cos sin cos cos )
(12)
where is the air density and S the wing surface area. The matrices M0, M1, M2, are defined as follows:
I yy I zz J yz J yz
1
M0
J xy I zz J yz J xz
det( I )
J xy J yz I yy J xz
J xy I zz J yz J xz
I xx I zz J xz J xz
J yz I xx J xy J xz
0
M 1 M 0 J xz
J xy
I yy I zz
M 2 M 0 J xy
J xz
J yz
0
J xy
J xy
I zz I xx
J yz
J xy J yz I yy J xz
J yz I xx J xy J xz
I xx I yy J xy J xy
J yz
J xz
0
J xz
J yz
I xx I yy
(13)
(14)
(15)
with I being the inertia matrix of the aircraft:
Ix
I J xy
J xz
J xy
Iy
J yz
J xz
J yz
I z
(16)
The variables CD, CY, CL, Cl, Cm, Cn are the “aerodynamic coefficients,” which were then used for representing
the aerodynamic forces and moments acting on the aircraft. These coefficients are functions of the aircraft state
vector ( ξ = [V, , , p, q, r, , , , x, y, z]T ) and input vector ( δ = [δT, iH, δA ,δR]T). The aerodynamic coefficients
can be approximated by affine functions of the state and input vectors18,15,17. Specifically, within this effort, we have:
c
q C Di iH
H
2V
c
C L ( , ) CL 0 CL CLq
q C Li iH
H
2V
c
Cm ( , ) Cm 0 Cm Cmq
q Cmi iH
H
2V
b
b
CY ( , ) CY 0 CY CYp
p CYr
r CY A A CY R R
2V
2V
b
b
Cl ( , ) Cl 0 Cl Clp
p Clr
r Cl A A Cl R R
2V
2V
b
b
Cn ( , ) Cn 0 Cn C np
p Cnr
r Cn A A Cn R R
2V
2V
C D ( , ) C D 0 C D C Dq
(17)
(18)
(19)
(20)
(21)
(22)
where the individual coefficients contributing to the aerodynamic coefficients are referred to as “stability and control
derivatives”7. Eqs. (17-22) represent the total aircraft drag, lift, pitching moment, aerodynamic side-force, rolling
moment, and yawing moment coefficients, respectively20.
C. Nominal Non-Linear Identification
In order to identify the non-linear mathematical model, a detailed estimate of the aircraft inertial characteristics –
included in the variables m, M1, M2, and M0 in Eqs. (3)-(12)7 – was required. A ‘swing pendulum’ set-up was
10
American Institute of Aeronautics and Astronautics
specifically designed for this effort21 incorporating a symmetric open cube suspended from a steel rod, built
specifically to hold a model aircraft. The period of oscillation of the box frame (plus the aircraft model) was
measured as it would swing from the rod. The aircraft was positioned in three configurations to measure Ixx, Iyy, and
Izz. For Ixx, and Iyy,, the aircraft was situated to swing about the rod, parallel to the x and y body-axes, respectively.
For obtaining Izz, the apparatus was suspended from ropes, allowing for an oscillation along the z body-axis in a
bifilar torsional pendulum setup. The value for the product of inertia, Jxz, was determined through the non-linear
model identification optimization process due to the difficulty to accurately identify it experimentally.
The next step was to determine the aircraft aerodynamic coefficients by converting the linear model to provide
the initial non-linear model values. The relationships for determining the coefficients of the matrices in the linear
models (Eq. (1-2)) starting from the values of the aerodynamic derivatives and geometric-inertial parameters are
well known18. By inverting these relationships16, and using the experimental values of the geometric and inertial
parameters, it is possible to evaluate the initial values for each of the aerodynamic derivatives. The relationships
used for the iterative evaluation of the stability and control derivatives are provided below7:
m
C D
(23)
g ALG12
q0 S
C Dq
2mV0
ALG13
q0 Sc
(24)
m
BLG1
q0 S
(25)
C DiH
CD 0
T0 cos 0
C D 0 CDiH iH 0
q0 S
(26)
mV0 ALG22 T0
q0 S
(27)
2mV02
q0 Sc
(28)
C L
C Lq 1 ALG23
C LiH
CL0
mV0
BLG2
q0 S
mg T0 sin 0
CL 0 CLiH iH 0
q0 S
Cm
1
Cmq M q Sc
4 0
Cmi
H
ALG32
2V
0 ALG33
c
BLG
3
(29)
(30)
(31)
Cm 0 Cm 0 CmiH iH
(32)
C
ALT11
Y mV0
CY A
BLT11
q
S
0
BLT12
CY R
(33)
CYp 2mV02 ( ALT12 sin 0 )
C
Yr q0 Sb ( ALT13 cos 0 )
Clp Clr
ALT22 ALT23
2V0
M 5 1
C
2
C
q0 Sb
nr
ALT32 ALT33
np
Cl
ALT21
1
M 51
C
ALT31
n q0 Sb
11
American Institute of Aeronautics and Astronautics
(34)
(35)
(36)
Cl A
Cn A
Cl R
BLT21
1
M 51
Cn R q0 Sb
BLT31
BLT22
BLT32
(37)
where
M4
M5
I x I z J xz2
det( I )
2
1 I y I z J yz
det( I ) J xy J yz I y J xz
(38)
J xy J yz I y J xz
I x I y J xy2
(39)
ALG and BLG are the longitudinal linear model matrices in Eq. (1), whereas ALT and BLT refer to the lateraldirectional linear model matrices in Eq. (2). The first and second subscripts indicate respectively the row number
and the column number of a given element of the matrices.
The Matlab® function “costfcn” was developed with the purpose of simulating the non-linear aircraft dynamics,
using the control deflections from the entire identification data set as inputs for the non-linear aircraft model, and
calculating the value of a cost function based on the RMS of the difference between the ‘actual’ aircraft outputs (that
is the measured output values from the identification data set) and the ‘simulated’ aircraft outputs (that is the outputs
from the nonlinear aircraft model). Therefore, the main input argument of “costfcn” is a vector containing a set of
values for the aerodynamic derivatives, along with the product of inertia Ixz, and the output argument is a single
nonnegative scalar number expressing the fitness of that particular set of aerodynamic derivatives and Ixz.
The “fmincon” function – featuring a constrained optimization of a multivariable function using a Sequential
Quadratic Programming technique14 – was then used to iteratively minimize the cost function implemented within
“costfcn”. Essentially “fmincon” iteratively calls “costfcn” with different inputs, until the set of aerodynamic
derivatives – along with the product of inertia Ixz – providing the best fit with the flight data is found. The starting
point for the minimization process is the initial set of aerodynamics derivatives calculated using Eqs. (23-37). It
should be emphasized that the selection of the cost function has to be performed carefully to avoid local minima
problems. Particularly, the selected cost function contains three components, a term representing the RMS of the
deviation between the real and predicted outputs, a frequency based term expressing the lowest spectral components
of the deviation, and a term expressing the difference between the current linearized models. This is obtained by
performing a numerical linearization algorithm on the current non-linear model and the ‘baseline’ linear model in
Eqs. (1-2)7. The resulting non-linear mathematical model is given as:
Geometric and Inertial Data
c = 0.76 m, b = 1.96 m, S = 1.37 m2
Ixx = 1.6073 kg m2, Iyy = 7.5085 kg m2, Izz = 7.1865 kg m2, Jxz = -0.56144kg m2
m = 20.64 kg, T = 54.62 N
Longitudinal Aerodynamic Derivatives
CD0 = 0.0722, CDα = 0.3824, CDq = 0, CDiH = 0.1453
CL0 = 0, CLα = 6.9473, CLq = 0, CLiH = 1.5174
Cm0 = 0.0445, Cmα = -0.7067, Cmq = -1.7125, CmiH = -0.5428
Lateral-directional Aerodynamic Derivatives
CY0 = -0.0221, CY = 0.2706, CYp = 4.2750, CYr = -0.3168, CYA = 1.0170, CYR = -0.7068
Cl0 = -0.007, Cl = -0.3666, Clp = -1.6623, Clr = 0.1947, ClA = -0.5053, ClR = 0.1091
Cn0 = 0.0023, Cn = 0.1098, Cnp = -0.1840, Cnr = -0.5745, CnA = -0.0669, CnR = -0.1961
D. Decoupled Linear Identification
For the development of the decoupled linear mathematical model of the aircraft, the three primary control
surface pairs were divided into their left and right components, leading to a total of six individual surfaces. For this
effort, the decoupled linear identification was conducted using flight data with ‘failed’ control surfaces. The
resulting state matrix was essentially a combination of the nominal longitudinal and lateral-directional state
matrices, including the velocity, angle of attack, angle of sideslip, roll rate, pitch rate, yaw rate, pitch angle, and
bank angle components, and is considered to remain unchanged for this class of failures. The input matrix, however,
accounted for the decoupled control surfaces by incorporating the six inputs individually. The nominal linear model
was essentially derived by dividing the combined stabilator, aileron, and rudder input matrix components into the six
individual components, thus halving the numeric values for each of the pair when reassigned to the surfaces.
12
American Institute of Aeronautics and Astronautics
The modeling procedure described above does not account for some components of the input matrix at ‘failure’
conditions. These components include the individual stabilator effects on the lateral-directional states and the
individual aileron and rudder effects on the longitudinal states. In this case, the individual stabilator inputs had an
effect on the angle of sideslip, roll rate, and yaw rate, and the individual aileron inputs had an effect on the angle of
attack and pitch rate - which is not observed under nominal conditions. For this study, as rudder failures were not
incorporated, their contributions to the longitudinal dynamics were not accounted for.
An initial attempt to use the ‘standard’ Matlab® System Identification Toolbox led to inaccurate results in the
derivation of a decoupled model. Therefore, a full state matrix (8 states) was built by combining the longitudinal and
lateral-directional nominal linear models, and two methods were used to identify the input matrix components
affected by the control surface failures: Normalized Recursive Least Squares (NRLS)6 and Fourier Transform
Regression (FTR)11,22-27.
A Simulink® scheme was developed using the Parameter Identification Library developed at WVU28 to evaluate
a section of flight data where the control surface failure occurred and identify the unknown input matrix
components, using both methods for comparison purposes. The FTR block was designed to solve Eq. (40), where E
and F are known constant vectors and Θ is an unknown vector to be estimated.
Ez (t ) Fz (t ) x (t )T
(40)
By sampling and applying the Discrete Time Fourier Transform (DTFT) to the input and motion variables at time
t = it we have:
j Ez ( ) Fz ( ) x ( )T
(41)
where
N 1
N 1
i0
i0
x ( ) x(it )e ji t , z ( ) z (i t )e ji t
(42)
In the case of a failed stabilator, where the angle of sideslip, roll rate, and yaw rate due to the individual
stabilator contributions require identification (in Eq. (40)), x represents the deflection of the healthy individual
surface, and F represents the affected states mentioned. In the case of a failed aileron affecting angle of attack and
pitch rate, x represents the deflection of the healthy individual surface, and F represents those affected states
mentioned. During the identification process, the “unknown” input matrix contributions were determined using
failure flight data. In these trials, the components of the output vector Θ represented the unknown values within the
input matrix for that particular control surface deflection. The behavior of the aircraft during the failure flight
scenarios was used to identify the unknown values in the linear model input matrix under failure conditions.
Similar results were observed between the NRLS and the FTR methods for the individual control surface
contributions, where the FTR results were used in the linear model with the NRLS results used for validation
purposes. The results provided an accurate model of the aircraft behavior under failure conditions. The new
contributions were identified using only the right stabilator or right aileron contributions; however, when identifying
the final input matrix of the decoupled linear model, the right control surface contribution was replicated for that of
the left control surface with special attention placed on the sign conventions.
The sign convention for the decoupled control surfaces is shown in Eqs. (43-45). These equations represent the
combination of the individual left and right control surface components and how they equate to the total contribution
from the surface.
1
iH iHR
2 L
1
A A R AL
2
1
R R L R R
2
iH
(43)
(44)
(45)
Based on these equations, in the case of the left and right stabilator affecting the roll rate, the signs of the input
matrix contributions were opposite, mimicking the aileron sign convention. In the case where the left and right
13
American Institute of Aeronautics and Astronautics
ailerons affected the pitch rate, the signs of the input matrix contributions were the same, mimicking the stabilator
sign convention. Using these conventions for the input matrix, the resulting decoupled linear mathematical model
for the WVU YF-22 is shown in Eq. (46). The components of the input matrix – identified using the FTR method –
are included in the decoupled linear model.
V 0.2835 -23.0959
0
0
0
0
0.1711
0 V
5.6878
0
0
0.5931
0
0
0
0
0
0
0.9974
0.2201
0
1.0146
0
0.2366
p 0
0
48.8486 5.4624
0
5.5935
0
0 p
53.7829
0
0
1.996
0
0
0 q
q 0
r 0
0
17.7651 1.6375
0
2.3993
0
0 r
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
(46)
0
0
0
0
20.1681 20.1681
iH L
2.1959
2.1959
1.21
1.21
0
0
1.09
1.09
0.4644 0.4644 0.0322 0.0322 iH R
30.3
30.3
47.7787 47.7787 17.8867 17.8867 aL
21.2428 21.2428 12.5
12.5
0
0
aR
10.05
1.4142
1.4142 25.8652 25.8652 r
10.05
L
0
0
0
0
0
0
rR
0
0
0
0
0
0
E. Decoupled Non-Linear Aircraft Model
The aerodynamic coefficients for the decoupled non-linear aircraft model are similar to those in the nominal
non-linear aircraft model as they are functions of the aircraft state vector ( ξ = [V, , , p, q, r, , , , x, y, z]T ) and
input vector ( δ = [δT, iH, δA ,δR]T ). The aerodynamic coefficients for the decoupled non-linear aircraft model,
however, have contributions from each of the six control surfaces for each coefficient. Specifically, within this
effort, the aerodynamic coefficients were defined as:
c
q C Di iH L CDi iH R C D A AL CD AR AR CD R RL C D R RR
HL
HR
L
L
R
2V
c
C L ( , ) CL 0 CL CLq
q C Li iH L C Li iH R C L A AL CL AR AR CL R RL CL R RR
HL
HR
L
L
R
2V
c
Cm ( , ) Cm 0 Cm Cmq
q Cmi iH L Cmi iH R Cm A AL Cm AR AR Cm R RL Cm R RR
HL
HR
L
L
R
2V
b
b
CY ( , ) CY 0 CY CYp
p CYr
r CYiH iH L CYiH iH R CY A AL CY A AR CY R RL CY R RR
L
R
L
R
L
R
2V
2V
b
b
Cl ( , ) Cl 0 Cl Clp
p Clr
r CliH iH L CliH iH R Cl A AL Cl A AR Cl R RL Cl R RR
L
R
L
R
L
R
2V
2V
b
b
Cn ( , ) Cn 0 Cn Cnp
p Cnr
r CniH iH L CniH iH R Cn A AL Cn A AR Cn R RL Cn R RR
L
R
L
R
L
R
2V
2V
C D ( , ) C D 0 C D C Dq
(47)
(48)
(49)
(50)
(51)
(52)
F. Decoupled Non-Linear Identification
The next task was to determine the aerodynamic coefficients by converting the linear model to provide the initial
non-linear model values. The relationships for evaluating the coefficients of the matrices in the decoupled linear
model (Eq. (46)) starting from the values of the aerodynamic derivatives and geometric-inertial parameters had to be
established. By inverting these relationships similarly to the method in the nominal nonlinear model and using the
experimental values of the geometric and inertial parameters, it was possible to evaluate the initial values for each of
the aerodynamic derivatives. The relationships used for the iterative evaluation of the stability and control
derivatives are provided below:
14
American Institute of Aeronautics and Astronautics
C D
m
g A12
q0 S
2mV0
A15
q0 Sc
(54)
C DiH
m
B11
q0 S
(55)
C DiH
m
B12
q0 S
(56)
C D A
m
B13
q0 S
(57)
C D A
m
B14
q0 S
(58)
C D R
m
B15
q0 S
(59)
C D R
m
B16
q0 S
(60)
C Dq
L
R
L
R
L
R
CD 0
T0 cos 0
C D 0 CDiH iH 0 C DiH iH 0
L
R
q0 S
(61)
mV0 A22 T0
q0 S
(62)
2mV02
q0 Sc
(63)
C L
C Lq 1 A25
C LiH
mV0
B21
q0 S
(64)
C LiH
mV0
B22
q0 S
(65)
C L A
mV0
B23
q0 S
(66)
C L A
mV0
B24
q0 S
(67)
C L R
mV0
B25
q0 S
(68)
C L R
mV0
B26
q0 S
(69)
L
R
L
R
L
R
CL0
(53)
mg T0 sin 0
CL 0 CLiH iH 0 CLiH iH 0
L
R
q0 S
15
American Institute of Aeronautics and Astronautics
(70)
Cm
C
mq
CmiH
L
CmiH R
1
Cm AL M 4 q0 Sc
Cm AR
Cm RL
C
m RL
A52
2V
0 A55
c
B
51
B52
B53
B54
B55
B
56
(71)
Cm 0 Cm 0 CmiH iH 0 CmiH iH 0
(72)
CY
A33
C
B
YiH L
31
C
B32
YiH R
C mV0
Y AL
q S B33
0
B34
CY
AR
B35
CY R
L
B
36
CY RR
(73)
L
CYp 2mV02
C
Yr q0 Sb
Clp
C
lr
R
( A34 sin 0 )
( A cos )
36
0
Cnp
2V0
A
M 51 44
2
Cnr q0 Sb
A46
A64
A66
Cl
A
1
M 51 43
C
A63
n q0 Sb
CliH L
CliH R
Cl AL
Cl AR
C
l RL
C
l RR
CniH
L
B41
CniH
R
B42
Cn A
B43
1
L
M 5 1
Cn A q0 Sb
B44
R
B
Cn R
45
L
B46
Cn R
R
(74)
(75)
(76)
B61
B62
B63
B64
B65
B66
(77)
where M4 and M5 are described by Eqs. (38-39). A and B are the decoupled linear model matrices in Eq. (46) where
the first and second subscripts indicate, respectively, the row and column number of a given element of the matrices.
As in the nominal non-linear model optimization process, the Matlab® function “costfcn” and “fmincon” were
utilized with the purpose of simulating and optimizing the non-linear aircraft dynamics. In the decoupled non-linear
case, the starting point for the minimization was an initial set of aerodynamic derivatives calculated using Eqs. (5377). Again, the selection of the cost function was attained as to avoid an issue of local minima problems.
16
American Institute of Aeronautics and Astronautics
Two approaches were used in an attempt to identify a decoupled non-linear aircraft model. The first approach
utilized the decoupled linear aircraft model with FTR (Eq. (46)). This linear model was converted to a non-linear
model using Eqs. (53-77). A second approach utilized the final nominal non-linear model previously identified, for
which the control surface pair coefficients were decoupled. This enabled the effects of each individual control
surface on the aerodynamic coefficients to be individually determined, and the coefficients were split by
incorporating the conventions described by Eqs. (43-45). New “unknown” coefficients (CDAL, CDAR, CDRL, CDRR,
CLAL, CLAR, CLRL, CLRR, CmAL, CmAR, CmRL, CmRR, CYiHL, CYiHR, CliHL, CliHR, CniHL, CniHR) had to be identified as
well. Since this non-linear model was essentially a starting point for the optimization process, the new coefficients
were assigned the same values as the non-linear model identified from the first approach. This provided an adequate
starting point for the iterative optimization process, which would improve the first estimates of these “unknown”
coefficients to arrive at a finalized decoupled aircraft model.
Each non-linear model was run through the optimization process using two method variations. The first
optimization method allowed all of the coefficients of the non-linear model to iterate as the program steps
proceeded, thus having more variables changing. The second method only optimized the new “unknown”
coefficients by running them through the iterative process while maintaining the typical nominal non-linear
coefficients as they were originally identified. The “best” decoupled non-linear aircraft model was obtained by using
the second optimization method, which only revised the new coefficients, along with the second modeling approach
- nominal non-linear model split with the introduction of the “unknown” coefficients. The success of this model is
likely due to the accuracy of the nominal non-linear model in representing the aircraft since that portion of the
decoupled non-linear model was held constant in this case. This model allowed for the focus to be on the
improvement of the new coefficients, which was performed during the optimization process. The resulting nonlinear mathematical model is given by:
Geometric and Inertial Data
c = 0.76 m, b = 1.96 m, S = 1.37 m2
Ixx = 1.6073 kg m2, Iyy = 7.5085 kg m2, Izz = 7.1865 kg m2, Jxz = -0.56144kg m2
m = 20.64 kg, T = 54.62 N
Decoupled Aerodynamic Derivatives
CD0 = 0.0722, CDα = 0.3824, CDq = 0, CDiHL =0.0727, CDiHR =0.0727, CDAL = 1.7356, CDAR = 1.7356,
CDRL = 1.0717, CDRR = 1.0717
CL0 = 0, CLα = 6.9473, CLq = 0, CLiHL = 0.7587, CLiHR = 0.7587, CLAL = 0.7463, CLAR = 0.7463,
CLRL = -0.0089, CLRR = -0.0089
Cm0 = 0.0445, Cmα = -0.7067, Cmq = -1.7125, CmiHL = -0.2714, CmiHR = -0.2714, CmAL = -0.1685, CmAR = -0.1685,
CmRL = -0.2758, CmRR = -0.2758
CY0 = -0.0221, CY = 0.2706, CYp = 4.2750, CYr = -0.3168, CYiHL = 1.5883, CYiHR = -1.5883, CYAL = -0.5085,
CYAR = 0.5085, CYRL = -0.3534, CYRL = -0.3534
Cl0 = -0.007, Cl = -0.3666, Clp = -1.6623, Clr = 0.1947, CliHL = 0.0270, CliHR = -0.0270, ClAL = 0.2526,
ClAR = -0.2526, ClRL = 0.0546, ClRL = 0.0546
Cn0 = 0.0023, Cn = 0.1098, Cnp = -0.1840, Cnr = -0.5745, CniHL = 0.0203, CniHR = -0.0203, CnAL = 0.0335,
CnAR = -0.0335, CnRL = -0.098, CnRL = -0.098
V. Simulation Results
After deriving both the nominal and decoupled non-linear models, simulation studies were conducted to
validate their performance. Sections of measured flight data were implemented into a simulation scheme where the
model performance could be assessed based upon accuracy when compared to measured flight data. The primary
focus was on the reproduction of the behavior of the angle of attack, angle of sideslip, as well as the aircraft pitch,
roll, and yaw rates. Simulation results are shown for approximately 80 s of flight data featuring stabilator doublet
maneuvers during the straight and level flight conditions. The blue line represents the measured flight data, and the
red line represents the aircraft model simulation results.
17
American Institute of Aeronautics and Astronautics
10
6
Actual
Estimated
8
Actual
Estimated
4
6
Angle of Sideslip (deg)
Angle of Attack (deg)
2
4
2
0
-2
-4
-2
-6
-4
-6
0
0
10
20
30
40
50
Time (sec)
60
70
80
-8
0
90
10
Figure 7. Angle of Attack (deg)
20
30
40
50
Time (sec)
60
70
60
Actual
Estimated
Actual
Estimated
100
40
50
20
Pitch Rate (deg/s)
Roll Rate (deg/s)
90
Figure 8. Angle of Sideslip (deg)
150
0
-50
-100
-150
80
0
-20
-40
0
10
20
30
40
50
Time (sec)
60
Figure 9. Roll Rate (deg/s)
70
80
90
-60
0
10
20
30
40
50
Time (sec)
60
70
80
90
Figure 10. Pitch Rate (deg/s)
In the case of the decoupled non-linear model, the simulation results are shown for approximately 36 s of flight
featuring stabilator doublet maneuvers with a left stabilator failed at trim on straight and level flight conditions. This
segment of flight data includes two separate doublet maneuvers performed during the failure conditions at straight
and level flight and a coordinated turn in the flight path under nominal conditions. Again, the blue line represents
measured data and the red line represents simulation results.
18
American Institute of Aeronautics and Astronautics
8
2
Actual
Estimated
7
Actual
Estimated
1
6
Angle of Sideslip (deg)
Angle of Attack (deg)
5
4
3
2
1
0
0
-1
-2
-3
-1
-2
-4
0
5
10
15
20
Time (sec)
25
30
35
40
0
5
10
15
20
Time (sec)
25
30
35
40
Figure 12: Angle of Sideslip (deg)
Figure 71: Angle of Attack (deg)
100
35
Actual
Estimated
Actual
Estimated
30
50
25
Pitch Rate (deg/s)
Roll Rate (deg/s)
20
0
-50
15
10
5
0
-100
-5
-10
-150
0
5
10
15
20
Time (sec)
25
30
35
40
Figure 13: Roll Rate (deg/s)
-15
0
5
10
15
20
Time (sec)
25
30
35
Figure 14: Pitch Rate (deg/s)
Simulations were also conducted using lateral-directional maneuvers, which had similar performance to the
longitudinal maneuvers. The nominal non-linear model performed extremely well, resembling closely the actual
flight data. The decoupled model, as expected, was not as accurate as the nominal model, but it also performed well
enough to mimic the behavior of the aircraft during the failure flight scenarios.
VI. Conclusions
A parameter identification study investigating non-linear modeling has been conducted using nominal and failure
flight data from the WVU YF-22 research aircraft. A preliminary nominal non-linear model was developed and
validated through simulation studies. A preliminary decoupled non-linear model was also developed and validated
through simulation studies using flight data with failed control surfaces. This model was found to more closely
match the general behavior of the actual flight throughout the simulations. These models are the initial findings of
this study; additional research is being conducted with the flight data. The final nominal and decoupled
mathematical models will be included in the final version of this manuscript. Following further evaluation of these
models, future plans include on-board implementation and continued experimental flight testing. Ultimately these
models will provide necessary and reliable validation techniques for a novel class of fault-tolerant flight control
systems currently being designed within the activities of the WVU NASA EPSCoR project.
19
American Institute of Aeronautics and Astronautics
40
Acknowledgments
This research is supported by a NASA EPSCoR Grant # NNX07AT53A administered through the NASA West
Virginia Space Grant Consortium (WVSGC). Special thanks are extended to John Burken, the NASA Dryden
Project Monitor, for his technical assistance and cooperation.
References
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
Perhinschi, M.G., Napolitano, M. R., Campa, G., Fravolini, M. L. “Integration of Fault Tolerant Systems for Sensor and
Actuator Failures within the WVU NASA F-15 Simulator,” AIAA Guidance, Navigation, and Control Conference 2003,
August, 2003. Austin, TX.
Perhinschi, M.G., Napolitano, M.R., Campa, G., Fravolini, M.L., “Primary Control Surface Failure Detection and
Identification Scheme,” AIAA Guidance, Navigation, and Control Conference 2003, August 2003. Austin, TX.
National Transportation and Safety Board, “Aircraft Accident Report: USAir Flight 427,” NTSB/AAR-99/01. US
Government Printing Office, Washington, D.C. 20594. 1999.
National Transportation and Safety Board, “Aircraft Accident Report: United Airlines Flight 585,” NTSB/AAR-01/01. US
Government Printing Office, Washington, D.C. 20594. 2001.
National Transportation and Safety Board, “Aircraft Accident Report: United Airlines Flight 232,” NTSB/AAR-90/06. US
Government Printing Office, Washington, D.C. 20594. 1990.
Perhinschi, M.G., Campa, G., Napolitano, M.R., Lando, M., Massotti, L., and Fravolini, M.L, “Modeling and Simulation of
a Fault-Tolerant Flight Control System”, International Journal of Modeling and Simulation, Vol. 26, No. 1, 2006.
Campa, G., Gu, Y., Seanor, B., Napolitano, M.R., Pollini, L., and Fravolini, M.L., “Design and Flight Testing of Non-Linear
Formation Control Laws”, Control Practice Engineering: A Journal of the International Federation of Automatic Control,
15 (2007), 1077-1092.
Napolitano, M.R. “Development of Formation Flight Control Algorithms Using 3 YF-22 Flying Models,” AFOSR Final
Report, AFOSR Grant F49620-01-1-0373, April 2005.
Napolitano, M.R., Paris, A., Seanor, B., Bowers, A.H. “Estimation of the Longitudinal Aerodynamic Parameters from Flight
Data for the NASA F/A-18 HARV”, AIAA Paper 96-3419, Proceedings of the AIAA Atmospheric Flight Mechanics
Conference 1996, San Diego, CA, July 1996.
Bowers, A.H., Pahle, J.W., Wilson, R.J., Flick, B.C., Rood, R.L. “An Overview of the NASA F-18 High Alpha Research
Vehicle,” NASA Technical Memorandum 4772. Dryden Flight Research Center, Edwards, CA. October 1996.
Klein, V., and Morelli, E.A., Aircraft System Identification: Theory and Practice, AIAA Education Series. American
Institute of Aeronautics and Astronautics, Inc. Reston, VA., 2006.
Ljung, L., System Identification: Theory for the User, 2nd Ed. PTR Prentice Hall, Upper Saddle River, Englewood Cliffs, NJ.
1999.
Xie, X. and Lu, C., “Optimization and Coordination of Wide-Area Damping Controls for Enhancing the Transfer of
Capability of Interconnected Power Systems,” Elsevier, Science Direct Online. Electric Power Systems Research 78 (2008)
1099-1108. http://www.sciencedirect.com/
Simulink, Simulation, and Model Based Design, The Mathworks Inc., Natick, MA, 2007.
Rauw, M.O., “FDC 1.2 – A Simulink Toolbox for Flight Dynamics and Control Analysis.” Zeist, The Netherlands, 1997.
ISBN:90-807177-1-1, http://www.dutchroll.com
Campa, G. “Airlib, The Aircraft Library”, 2003. http://www.mathworks.com/matlabcentral/
Brumbaugh, R.W. “An Aircrat Model for the AIAA Controls Design Challenge,” NASA Contractor Report 186019,
December 1991.
Etkin, B., Dynamics of Atmospheric Flight. John Wiley & Sons, Inc. 1972.
Stevens, B. and Lewis, F. Aircraft Control and Simulation. 2nd Ed. John Wiley & Sons, Inc. Hoboken, NJ. 2003.
Roskam, J. Airplane Flight Dynamics and Automatic Flight Controls – Part I, Design, Analysis, and Research Corporation,
Lawrence, KS. 2003.
Soule, H.A., Miller, M.P. “The Experimental Determination of the Moments of Inertia of Airplanes,” NACA Report 467,
1934. http://naca.larc.nasa.gov/reports/1934/
Smith, M.S., Moes, T.R., Morelli, E.A., “Real-Time Stability and Control Derivative Extraction from F-15 Flight Data,”
National Aeronautics and Space Administration, Dyrden Flight Research Center, Edwards, CA. NASA/TM-2003-212027.
September 2003.
Morelli, E.A. “Real-Time Parameter Estimation in the Frequency Domain,” AIAA-99-4043, 1999.
Morelli, E.A. “In-Flight System Identification,” AIAA-98-4261, 1998.
Song, Y., Campa, G., Napolitano, M.R., Seanor, B., Perhinschi, M.G., “Comparison of On-Line Parameter Estimation
Methods within a Fault-Tolerant Flight Control System,” AIAA Journal of Guidance, Control, and Dynamics, vol. 25, no. 3,
2002.
Perhinschi, M.G., Lando, M., Massotti, L., Campa, G., Napolitano, M.R., Fravolini, M.L. “Real-Time Parameter Estimation
Issues for the NASA IFCS F-15 Fault-Tolerant Systems,” AIAA American Control Conference, 2002. ACC02-AIAA1079.
Campa, G., Gu, Y. “F-22 Linear Identification,” WVU Technical Report, Department of Mechanical and Aerospace
Engineering, College of Engineering and Mineral Resources, West Virginia University, Morgantown, WV. February 2002.
Campa, G. “PIL, Parameter Identification Library”, 2008. http://www.mathworks.com/matlabcentral/
20
American Institute of Aeronautics and Astronautics