Handling Sparsity via the Horseshoe
advertisement

Handling Sparsity via the Horseshoe
Carlos M. Carvalho
Booth School of Business
The University of Chicago
Chicago, IL 60637
Nicholas G. Polson
Booth School of Business
The University of Chicago
Chicago, IL 60637
Abstract
From a Bayesian-learning perspective, there are two
main sparse-estimation alternatives: discrete mixtures
and shrinkage priors. The first approach (Mitchell and
Beauchamp, 1988; George and McCulloch, 1993) models each βi with a prior comprising both a point mass
at βi = 0 and an absolutely continuous alternative; the
second approach (see, e.g., Tibshirani, 1996 and Tipping, 2001) models the βi ’s with absolutely continuous
“shrinkage” priors centered at zero.
This paper presents a general, fully Bayesian
framework for sparse supervised-learning
problems based on the horseshoe prior. The
horseshoe prior is a member of the family of
multivariate scale mixtures of normals, and
is therefore closely related to widely used approaches for sparse Bayesian learning, including, among others, Laplacian priors (e.g. the
LASSO) and Student-t priors (e.g. the relevance vector machine). The advantages of
the horseshoe are its robustness at handling
unknown sparsity and large outlying signals.
These properties are justified theoretically
via a representation theorem and accompanied by comprehensive empirical experiments
that compare its performance to benchmark
alternatives.
1
James G. Scott
McCombs School of Business
The University of Texas
Austin, TX 78712
The choice of one approach or the other involves a series of tradeoffs. Discrete mixtures offer the correct
representation of sparse problems by placing positive
prior probability on βi = 0, but pose several difficulties. These include foundational issues related to
the specification of priors for trans-dimensional model
comparison, and computational issues related both
to the calculation of marginal likelihoods and to the
rapid combinatorial growth of the solution set. Shrinkage priors, on the other hand, can be very attractive computationally. But they create their own set
of challenges, since the posterior probability mass on
{βi = 0} (a set of Lebesgue measure zero) is never positive. Truly sparse solutions can therefore be achieved
only through artifice.
Introduction
Supervised Learning can be cast as the problem of
p
estimating a set of coefficients β = {βi }i=1 that determine some functional relationship between a set of
p
inputs {xi }i=1 and a target variable y. This framework, while simple, is of central focus in modern statistics and artificial-intelligence research; it encompasses
problems of regression, classification, function estimation, covariance regularization, and others still. The
main challenges arise in “large-p” problems where, in
order to avoid overly complex models that will predict poorly, some form of dimensionality reduction is
needed. This entails finding sparse solutions, where
some of the elements βi are zero (or very small).
In this paper we adopt the shrinkage approach, while
at the same time acknowledging the discrete-mixture
approach as a methodological ideal. Indeed, it is with
this ideal in mind that describe the horseshoe prior
(Carvalho, Polson and Scott, 2008) as a default choice
for shrinkage in the presence of sparsity.
We begin our discussion in the simple situation where
β is a vector of normal means, since it is here that the
lessons drawn from a comparison of different shrinkage approaches for modeling sparsity are most readily
understood. In this context, we provide a theoretical characterization of the robustness properties of the
horseshoe via a representation theorem for the posterior mean of β, given data y. We then give a handful
of examples of the horseshoe’s performance in linear
models, function estimation, and covariance regular-
Appearing in Proceedings of the 12th International Conference on Artificial Intelligence and Statistics (AISTATS)
2009, Clearwater Beach, Florida, USA. Volume 5 of JMLR:
W&CP 5. Copyright 2009 by the authors.
73
Handling Sparsity via the Horseshoe
0.7
ization (a problem of unsupervised learning for which
the horseshoe prior is still highly relevant).
−3
−1
0
1
2
3
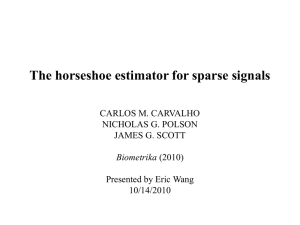
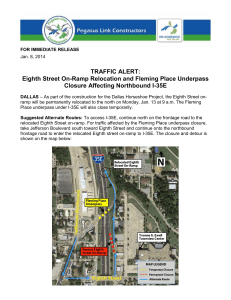
Figure 1: The horseshoe prior and two close cousins:
Laplacian and Student-t.
2.1
Relation to other shrinkage priors
The density in (1) is perfectly well defined without reference to the λi ’s, which can be marginalized away.
But by writing the horseshoe prior as a scale mixture of normals, we can identify its relationship with
commonly used procedures in supervised learning. For
example, exponential mixing, with λ2i ∼ Exp(2), implies independent Laplacian priors for each βi ; inversegamma mixing, with λ2i ∼ IG(a, b), leads to Student-t
priors. The former represents the underlying model for
the LASSO (Tibshirani, 1996), while the latter is the
model associated with the relevance vector machine
(RVM) of Tipping (2001).
We start by introducing our approach to sparsity in the
simple, stylized situation where (y|β) ∼ N(β, σ 2 I),
and where β is believed to be sparse.
The horseshoe prior assumes that each βi is conditionally independent with density πHS (βi | τ ), where πHS
can be represented as a scale mixture of normals:
λi
−2
Beta
The Horseshoe Prior
(βi |λi , τ ) ∼ N(0, λ2i τ 2 )
0.4
0.0
Finally, we will return several times to a happy, and
remarkably consistent, fact about the horseshoe’s performance: that it quite closely mimics the answers one
would get by performing Bayesian model-averaging,
or BMA, under a heavy-tailed discrete-mixture model.
Bayesian model averaging is clearly the predictive gold
standard for such problems (see, e.g., Hoeting et al,
1999), and a large part of the horseshoe prior’s appeal
stems from its ability to provide “BMA-like” performance without the attendant computational fuss.
2
0.3
0.1
0.2
Density
0.5
0.6
Our goal is not to characterize the horseshoe estimator as a “cure-all”—merely a default procedure that is
well-behaved, that is computationally tractable, and
that seems to outperform its competitors in a wide variety of sparse situations. We also try to provide some
intuition as to the nature of this advantage: namely,
the horseshoe prior’s ability to adapt to different sparsity patterns while simultaneously avoiding the overshrinkage of large coefficients.
Student−t (df =1)
Laplacian
Horseshoe
Horseshoe near 0
(1)
+
This common framework allows us to compare the
appropriateness of the assumptions made by different models. These assumptions can be better understood by representing models in terms of the “shrinkage profiles” associated with their posterior expectations. Assume for now that σ 2 = τ 2 = 1, and define
κi = 1/(1 + λ2i ). Then κi is a random shrinkage coefficient, and can be interpreted as the amount of weight
that the posterior mean for βi places on 0 once the
data y have been observed:
λ2i
1
E(βi | yi , λ2i ) =
y
+
0 = (1−κi )yi .
i
1 + λ2i
1 + λ2i
∼ C (0, 1) ,
where C+ (0, 1) is a half-Cauchy distribution for the
standard deviation λi . We refer to the λi ’s as the local
shrinkage parameters and to τ as the global shrinkage
parameter.
Figure 1 plots the densities for the horseshoe, Laplacian and Student-t priors. The density function
πHS (βi |τ ) lacks a closed-form representation, but it
behaves essentially like log(1 + 2/βi2 ), and can be well
approximated by elementary functions as detailed in
Theorem 1 of Carvalho et al. (2008).
The horseshoe prior has two interesting features that
make it particularly useful as a shrinkage prior for
sparse problems. Its flat, Cauchy-like tails allow strong
signals to remain large (that is, un-shrunk) a posteriori. Yet its infinitely tall spike at the origin provides
severe shrinkage for the zero elements of β. As we will
highlight in the discussion that follows, these are the
key elements that make the horseshoe an attractive
choice for handling sparse vectors.
Since κi ∈ [0, 1], this is clearly finite, and so by Fubini’s
theorem,
Z 1
E(βi | y) =
(1 − κi )yi π(κi | y) dκi
0
=
{1 − E (κi | yi )} y .
(2)
By applying this transformation and inspecting the
priors on κi implied by different choices for π(λi ), we
74
Carvalho, Polson, Scott
Laplacian
0
0.5
κ
1.0
0
Strawderman−Berger
0
0.5
κ
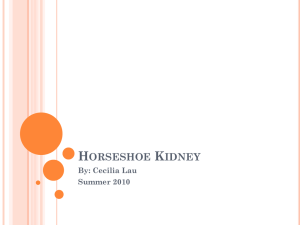
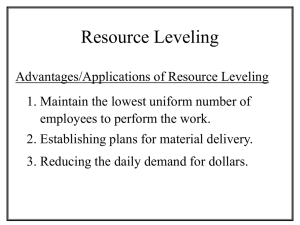
The shrinkage characteristics of the models are presented in Figure 3, where ȳi is plotted against β̂i =
E(βi |y). The important differences occur when ȳi ≈ 0
and when ȳi is large. Compared to the horseshoe prior,
the Laplacian specification tends to over-shrink the
large values of ȳ and yet under-shrink the noise observations. This is a direct effect of the prior on κi ,
which in the Laplacian case is bounded both at 0 and
1, limiting the ability of each κi to approach these values a posteriori.
Student−t
0.5
κ
1.0
Figure 3 also plots posterior draws for the global
shrinkage parameter τ , offering a closer look at the
mechanism underlying signal discrimination. Under
the horseshoe model, τ is estimated to be much smaller
than in the Laplacian model. This is perhaps the single most important characteristic of the horseshoe: the
clear separation between the global and local shrinkage
effects. The global shrinkage parameter tries to estimate the overall sparsity level, while the local shrinkage parameters are able to flag the non-zero elements
of β. Heavy tails for π(λi ) play a key role in this process, allowing the estimates of βi to escape the strong
“gravitational pull” towards zero exercised by τ .
Horseshoe
1.0
0
0.5
κ
1.0
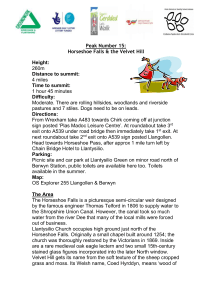
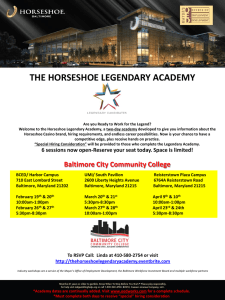
Figure 2: Densities for the shrinkage weights κi ∈ [0, 1].
κi = 0 means no shrinkage and κi = 1 means total shrinkage to zero.
Put another way, the horseshoe has the freedom to
shrink globally (via τ ) and yet act locally (via λi ).
This is not possible under the Laplacian prior, whose
shrinkage profile forces a compromise between shrinking noise and flagging signals. This leads to overestimation of the signal density of underlying vector,
combined with under-estimation of larger elements of
β. Performance therefore suffers—in this simple example, the mean squared-error was 25% lower under
the horseshoe model.
can develop an understanding of how these models attempt to discern between signal and noise. Figure 2
plots the densities for κ derived from a few important
models in this class. Choosing λi ∼ C+ (0, 1) implies
κi ∼ Be(1/2, 1/2), a density that is symmetric and
unbounded at both 0 and 1. This horseshoe-shaped
shrinkage profile expects to see two things a priori:
strong signals (κ ≈ 0, no shrinkage), and zeros (κ ≈ 1,
total shrinkage).
In fairness, the most commonly used form of the Laplacian model is the LASSO, where estimators are defined by the posterior mode (MAP), thereby producing zeros in the solution set. Our experiments of the
next section, however, indicate that the issues we have
highlighted about Laplacian priors remain even when
the mode is used—the overall estimate of the sparsity
level will still be governed by τ , which in turn is heavily influenced by the tail behavior of the prior on λi .
Robustness here is crucial, which is an issue towards
which we now turn.
No other commonly used shrinkage prior shares these
features. The Laplacian prior tends to a fixed constant
near κ = 1, and disappears entirely near κ = 0. The
Student-t prior and the Strawderman–Berger prior
(see Section 2.3) are both unbounded near κ = 0, reflecting their heavy tails. But both are bounded near
κ = 1, limiting these priors in their ability to squelch
noise components back to zero.
As an illustration, consider a simple example. Two repeated standard normal observations yi1 and yi2 were
simulated for each of 1000 means: 10 signals with
βi = 10, 90 signals βi = 2 and 900 noise components
where βi = 0. Based on this data, we estimate the
vector β under two models: (i) independent horseshoe
priors for each βi , and (ii) independent Laplacian priors. Both models assume τ ∼ C+ (0, 1), along with
Jeffreys’ prior π(σ) ∝ 1/σ.
2.2
Robust Shrinkage
The robust behavior of the horseshoe can be formalized using the following representation of the posterior
mean of β when (y|β) ∼ N(β, 1). Conditional on one
sample y ∗ ,
E(β|y ∗ ) = y ∗ +
75
d
ln m(y ∗ ),
dy ∗
(3)
Handling Sparsity via the Horseshoe
Shrinkage under Laplacian
Shrinkage under Horseshoe
Handling Noise
10
●
●
●
Horseshoe
Double Exponential
Flat
●
●
Horseshoe
Laplacian
Flat
4
6
8
10
Ybar
0
2
4
6
8
10
Ybar
Mean Local Shrinkage Weights
1.0
Posterior Draws for Tau
−2
0
4
0
2
Posterior Mean
0
Posterior Mean
●
●
−2
5
BetaHat
1
0
0
−2
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●●
●
●●
●
●●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
2
4
●
●
●
●
●
●
●●
●●
●
●
●●
●
●
●
●●
●
●●
●
●
●
●
●
●●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●●
●●
●
●
●●
●
●
●●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
2
BetaHat
6
6
8
8
2
●
10
10
●
●●
●
●
Signal Detection
●
●
●
●●
●
●
●
●
●
●
●
●
●
0.6
−5
−1
60
0.8
●
●
●
●
●
●
0.4
40
●
●
●
●
●
−2
0.2
0
0.0
●
●
Laplacian
Horseshoe
−2
●
●
●
−1
Laplacian
−10
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
20
●
●
●
●
●
●
0
1
2
−10
−5
0
5
10
Horseshoe
Y (units of sigma)
Y (units of sigma)
Figure 3: Plots of ȳi versus θ̂i for Laplacian (left) and
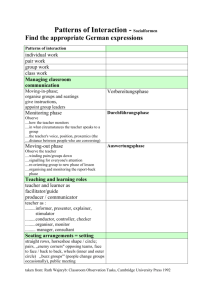
Figure 4: A comparison of the posterior mean versus y for
horseshoe (right) priors on data where most of the means
are zero. The diagonal lines are where θ̂i = ȳi .
horseshoe and Laplacian priors.
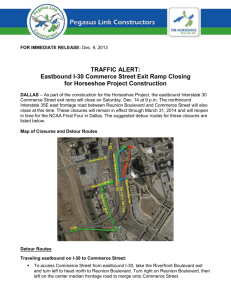
∗
R
near-identical shrinkage within roughly 2σ of the origin. Both models can “bow” near the origin to accommodate sparse vectors by changing τ ; only the horseshoe can simultaneously perform well in the tails, even
when τ is very small.
∗
where m(y ) = p(y |β) π(β) dβ is the marginal density for y ∗ (see Polson, 1991).
From (3) we get an essential insight about the behavior of an estimator in situations where y ∗ is very different from the prior mean. In particular, robustness
is achieved by using priors having the “bounded influence” property—i.e. those giving rise to a score function that is bounded as a function of y ∗ . If such a
bound exists, then for large values of |y ∗ |, E(β|y ∗ ) ≈
y ∗ , implying that the estimator never misses too badly
in the tails of the prior.
This effect can be confirmed by inspecting the joint
distribution of the data and parameters under the
horseshoe prior,
2
p
p
Y
e−κi yi /2 Y
1
√
p(y, κ, τ ) ∝ π(τ ) τ
,
2κ + 1 − κ
τ
1
−
κ
i
i
i i=1
i=1
(6)
from which it is clear that the marginal density for κi
is always unbounded at 1, regardless of τ . (This is one
reason why the posterior mode is inappropriate here.)
Hence the horseshoe prior, its tail robustness notwithstanding, will always have the ability to severely shrink
elements of β when needed.
2
Theorem 3 of Carvalho et al. (2008) shows that the
horseshoe prior is indeed of bounded influence, and
furthermore that
lim
|y ∗ |→∞
d
ln mH (y ∗ ) = 0 .
dy ∗
(4)
2.3
The Laplacian prior is also of bounded influence, but
crucially, this bound does not decay to zero in the tails.
Instead,
d
lim
ln mL (y ∗ ) = ±a ,
(5)
∗
∗
dy
|y |→∞
2
p
Relation to Bayesian model averaging
As we have mentioned, one alternative approach for
handling sparsity is the use of discrete mixtures priors,
where
βi ∼ (1 − w)δ0 + w · π(βi ) .
(7)
where a varies inversely with the global shrinkage parameter τ (Pericchi and Smith, 1992). Unfortunately,
when the vector β is sparse, τ will be estimated to be
small, and this “nonrobustness bias” a will be quite
large. Figure 4 illustrates these results by showing
the relationship between y ∗ and the posterior mean
under both the horseshoe and the Laplacian priors.
These are available analytically for fixed values of τ ,
which for the sake of illustration were chosen to yield
Here, w is the prior inclusion probability, and δ0 is
a degenerate distribution at zero, so that each βi is
assigned probability (1 − w) of being zero a priori.
Crucial to the good performance of the model in (7)
are the choice of π(β) and the careful estimation of w.
The former allows large signals to be accommodated,
while the latter allows the model to adapt to the overall level of sparsity in β, automatically handling the
76
Carvalho, Polson, Scott
implied multiple-testing problem (Scott and Berger,
2006). By carefully choosing π(β) and accounting for
the uncertainty in w, this model can be considered the
“gold standard” for sparse problems, both theoretically and empirically. This is extensively discussed by,
for example, Hoeting et al (1999) and Johnstone and
Silverman (2004).
variance components in general hierarchical models,
and justifications for our choices of τ ∼ C + (0, 1) and
π(σ) ∝ 1/σ appear in Gelman (2006). Alternatives
to a fully Bayesian analysis include cross validation
and empirical-Bayes, often called Type-II maximum
likelihood. These “plug-in” analysis are, in fact, the
standard choices in many applications of shrinkage estimation in both machine learning and statistics.
The discrete-mixture model is therefore an important
benchmark for any shrinkage prior. Here, we will focus on a version of the discrete mixture where the
nonzero βi ’s follow independent Strawderman–Berger
priors (Strawderman, 1971; Berger, 1980), which have
Cauchy-like tails and and yet still allow closed-form
convolution with the normal likelihood. Figure 2 displays the shrinkage profile of the Strawderman-Berger
prior on the κ scale, where it is seen to yield a Beta(1,
1/2) distribution. Here, the point mass at βi = 0
can be equivalently be construed as a point mass at
κi = 1. If Strawderman–Berger priors are assumed
for the nonzero βi ’s, the discrete mixture model will
yield a shrinkage profile with the desired unboundedness both at κi ≈ 0 (signal) and κi ≈ 1 (noise).
While we certainly do not intend to argue that “plugin” alternatives are wrong per se, we do recommend,
as a conservative and more robust route, the use of
the fully Bayesian approach. The full Bayes analysis
is quite simple computationally using MCMC, and will
avoid at least three potential problems:
1. Plug-in approaches will ignore the unknown correlation structure between τ and σ (or τ , σ and w in
the discrete mixture model). This can potentially
give misleading results in situations where the correlation is severe, while the full Bayes analysis will
automatically average over this joint uncertainty.
2. The marginal maximum-likelihood solution is always in danger of collapsing to the degenerate
τ̂ = 0. The issue is exacerbated when very few
signals are present, in which case the posterior
mass of τ will concentrate near 0 and signals will
be flagged via large values of the local shrinkage
parameters λi .
Notice that both the horseshoe prior and the discrete
mixture have mechanisms for controlling the overall
signal density in β. In the discrete mixture model,
this parameter is clearly w, the prior inclusion probability. But under the horseshoe prior, this role is
played by τ , the common variance parameter. This is
easily seen from the joint distribution in (6), since one
can approximate the conditional posterior for τ by
p(τ 2 | κ) ≈
(τ 2 )−p/2
≈
(τ 2 )−p/2
3. Plug-in methods may fail to correspond to any
kind of Bayesian analysis even asymptotically,
when there no longer is any uncertainty about the
relevant hyperparameters. See Scott and Berger
(2008) for an extensive discussion of this phenomenon.
−p
1 − κ̄
1+ 2
τ κ̄
1 p(1 − κ̄)
exp − 2
,
τ
κ̄
Pp
where κ̄ = p−1 i=1 κi .
This is essentially a
Ga {(p + 2)/2, (p − κ̄)/κ̄} distribution for τ −2 , with
posterior mean equal to 2(1 − κ̄)/κ̄. When κ̄ gets close
to 1, implying that most observations are shrunk to
zero, then τ 2 is estimated to be very small.
2.4
One may ask, of course, whether a global scale parameter τ is even necessary, and whether the local parameters λi can be counted upon to do all the work. (This
is the tactic used in, for example, the relevance vector
machine.) But this is equivalent to choosing τ = 1,
and we feel that Figure 3 is enough to call this practice into question, given how far away the posterior
distribution is from τ = 1.
Hyperparameters
Much of the above discussion focused on the behavior implied by different choices of priors for the local
shrinkage parameters λi ’s. Yet the estimation of the
global parameters τ and σ plays a large role in separating signal from noise, as seen in the example depicted
in Figure 2.
3
Examples
Carvalho, Polson, Scott and Yae (2009) provide an
extensive discussion of the use of the horseshoe in traditional supervised-learning situations, including linear regression, generalized linear models, and function estimation through basis expansions. We now
focus on a few examples that highlight the effectiveness of the horseshoe as a good default procedure.
So far, we have focused on a fully Bayesian specification where weakly informative priors were used
both for τ and σ (as well as w in the discrete mixture). There is a vast literature on choosing priors for
77
Handling Sparsity via the Horseshoe
Loss
LP
HS
DM
DE
HS
DM
`2
`1
σ2 = 1
LP
HS
DM
209 1.62 1.62
77
0.95
93
178 1.50 1.60
80
1.02
83
σ2 = 9
LP
HS
DM
850 1.47 1.51
416 0.99
440
341 1.56 1.75
142 1.10
123
Table 1: Risk under squared-error (`2 ) loss and absolute1
error (` ) loss in Experiment 1. Bold diagonal entries in the
top and bottom halves are median sum of squared-errors
and absolute errors, respectively, in 1000 simulated data
sets. Off-diagonal entries are average risk ratios, risk of
row divided by risk of column, in units of σ. LP: Laplacian.
HS: horseshoe. DM: discrete mixture, fully Bayes.
Case 1:
p
n
Lasso
HS
β 1:10
20
24
1.86
1.28
= (2, 2, 2, 2, 2, 2, 2, 2, 5, 20)
50
100 200 400
60
120 240 480
0.78 0.34 0.13 0.12
0.33 0.11 0.06 0.07
Case 2:
p
n
Lasso
HS
β 1:10
20
25
0.61
0.31
= (1, 2, 3, 4, 5, 6, 7, 8, 9, 10)
50
100 200 400
55
105 205 405
0.40 0.48 0.21 0.23
0.23 0.12 0.09 0.08
Table 2: Mean-squared error in estimating β in Experiment 2.
These situations all involve an n-dimensional vector
y ∼ N(Xβ, σ 2 I), where X is a n × p design matrix.
In regression, the rows of X are the predictors for
each subject; in basis models, they are the bases evaluated at the points in predictor space to which each
entry of y corresponds. The horseshoe prior for the
p-dimensional vector β takes the form in (1).
3.1
with moderately correlated entries, and simulated y
by adding standard normal errors to the true linear
predictor Xβ. In all cases, n scaled linearly with p.
For this example, we evaluated the horseshoe using
the LASSO (i.e. the posterior mode under Laplacian
priors) as a benchmark, with τ chosen through crossvalidation. Results are presented in Table 2.
Exchangeable means
In Experiment 3, we fixed p = 50, but rather than
fixing the non-zero values of β, we simulated 1000
data sets with varying levels of sparsity, where nonzero βi ’s were generated from a standard Student-t
with 2 degrees of freedom. (The coefficients were 80%
sparse on average, with nonzero status decided by a
weighted coin flip.) We again compared the horseshoe against the LASSO, but also included Bayesian
model-averaging using Zellner-Siow priors as a second
benchmark. Results for both estimation error and outof-sample prediction error are displayed in Figure 5.As
these results show, both BMA and the horseshoe prior
systematically outperform the LASSO in sparse regression problems, without either one enjoying a noticeable
advantage over the other.
Experiment 1 demonstrates the operational similarities between the horseshoe and a heavy-tailed discrete
mixture. We still focus on the problem of estimating a p-dimensional sparse mean (β) of a multivariate
normal distribution (implying that X is the identity).
We simulated 1000 data sets with different sparsity
configurations, and 20% non-zero entries on average.
Nonzero βi ’s were generated randomly from a Studentt distribution with scale τ = 3 and degrees of freedom
equal to 3. Data y was simulated under two possibilities for the noise variables: σ 2 = 1 and σ 2 = 9. In
each data set we estimate β by the posterior mean under three different models: horseshoe, Laplacian and
discrete mixtures. The results for estimation risk are
reported in Table 1.
3.3
Regardless of the situation, the Laplacian loses quite
significantly both to the horseshoe prior and the
discrete-mixture model. Yet neither of these two options enjoys a systematic advantage; their similarities
in shrinkage profiles seem to translate quite directly to
similar empirical results. Meanwhile, the nonrobustness of the Laplacian prior is quite apparent.
3.2
Basis expansion with kernels
In Experiment 4, we used the sine test function described in Tipping (2001) to assess the ability of the
horseshoe prior to handle regularized kernel regression.
For each of 100 different simulated data sets, 100 random points ti were simulated uniformly between −20
and 20. The response yi was then set to sin(ti )/ti + i ,
with i ∼ N(0, σ = 0.15).
Regression
The goal was to estimate the underlying function f (t)
using kernel methods. As a benchmark, we use the relevance vector machine, corresponding to independent
Student-t priors with zero degrees of freedom. Gaussian kernels were centered at each of the 100 observed
points, with the kernel bandwidth chosen as the de-
In Experiment 2, we chose two fixed vectors of ten
nonzero coefficients: β 1:10 = (2, 2, 2, 2, 2, 2, 2, 2, 5, 20)
and β 1:10 = (1, 2, 3, 4, 5, 6, 7, 8, 9, 10).
We then
“padded” these with (p − 10) zeros for several different choices of p, simulated random design matrices
78
Carvalho, Polson, Scott
L-OR
791
Parameter Estimation SSE
Lasso
●●
●
●
●
●
HS
●●●
●●●●
●● ●
●
●
BMA
●
●●● ●●●
●
0
●
●●
●
● ● ●● ● ●
●
●
●●
2
●
6
8
10
Out−of−sample Prediction SSE
●
●
●●●●●●●
HS
● ●●
●
●
●●
●
●●
●●
●● ●
●
●
●
●
200
400
600
problem in portfolio allocation, where one must assess the variance of a weighted portfolio of assets, and
where regularized estimates of Σ are known to offer
substantial improvements over the straight estimator
Σ̂ = Y 0 Y .
800
Figure 5: Results for Experiment 3. “BMA” refers to the
1.
model-averaged results under Zellner-Siow priors. “Lasso”
refers to the posterior mode under Laplacian priors.
Truth
Horseshoe (SSE = 1.26)
RVM (SSE = 3.44)
A useful way of regularizing Σ is by introducing offdiagonal zeros in its inverse Ω. This can be done
by searching for undirected graphs that characterize the Markov structure of y, a process known
as Gaussian graphical modeling (see Jones et. al,
2005). While quite potent as a tool for regularization, Bayesian model averaging across different graphical models poses the same difficulties as it does in linear models: marginal likelihoods are difficult to compute, and the model space is enormously difficult to
search.
●
●
1.0
●
●
●
●●
●
●●
●
●
0.5
sin(X)/X
●
●
●
●
●
●
●
●
●
●
●
0.0
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
● ●
●
●
●●
●
●
●
●
●
●●
●
●●
●
●●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Luckily, Gaussian graphical modeling can also be done
indirectly, either by fitting a series of sparse self-onself regression models for (yj | y −j ), j = 1, . . . , p, or
by representing the Cholesky decomposition of Ω as
a triangular system of sparse regressions. The first
option is done using the LASSO by Meinshausen and
Buhlmann (2006). We now present similar results using the horseshoe.
●
●
●
●
●
●
−20
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
● ●
●
●
●
●
●
●
●
● ●
●
● ●● ● ●
●
●
●
−0.5
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
−10
0
10
●
20
X
Figure 6: One example data set in Experiment 5 involving
the sin(t)/t test function, showing the true function, data,
and horseshoe/RVM estimates.
Our test data set is the Vanguard mutual-fund data
set (p = 59, n = 86) of Carvalho and Scott (2009).
We recapitulate their out-of-sample prediction exercise, which involves estimating Σ using the first 60
observations, and then attempting to impute random
subsets of missing values among the remaining 26 observations. We use that paper’s full BMA results as
a benchmark (which required many hours of computing using the FINCS algorithm of Scott and Carvalho,
2008).
fault in the “rvm” function in the R package “kernlab.” These kernel basis functions, evaluated at the
observed values of ti , formed the 100 × 100 design matrix, with β representing the vector of kernel weights.
In these 100 simulated data sets, the average sum of
squared errors in estimating f (t) at 100 out-of-sample
t points was 7.55 using the horseshoe prior, and 8.19
using the relevance vector machine. In 91 cases of 100,
the horseshoe prior yielded lower risk. An example of
one simulated data set is in Figure 6.
3.4
BMA
347
●●
●
●●
●
●
●
BMA
●
HS
372
turn values in the 59-dimensional mutual fund example.
“L-OR” and “L-AND” refer to estimates based on Lasso
regressions in the full conditionals of each asset. “L-Chol”
and “HS” refer to Lasso and horseshoe models on the triangular system of linear regressions from the Cholesky decomposition of Σ−1 . Finally, “BMA” is based on Bayesian
model averaging using the FINCS.
●
4
Lasso
L-Chol
520
Table 3: Sum of squared errors in predicting missing re-
●
●●
L-AND
729
Results from this prediction exercise are presented
in Table 3, where it is clear that the horseshoe, despite being a much simpler computational strategy,
performs almost as well as the benchmark (Bayesian
model averaging). Once again, both BMA and the
horseshoe outperform alternatives based on the Laplacian prior.
Unsupervised covariance estimation
Suppose we observe a matrix Y whose rows are n realizations of a p-dimensional vector y ∼ N(0, Σ), and
that the goal is to estimate Σ. This is an important
79
Handling Sparsity via the Horseshoe
4
Discussion
Statistical Association 88, 881–889.
J. Hoeting, D. Madigan, A. E. Raftery, and C. Volinsky (1999). Bayesian model averaging: a tutorial.
Statist. Sci. 14, 382–417.
We have introduced and discussed the use of the horseshoe prior in the estimation of sparse vectors in supervised learning problems. The horseshoe prior is based
on a novel multivariate-normal scale mixture; it yields
estimates that are robust both to unknown sparsity
patterns and to large outlying signals, making it an
attractive default option.
I. Johnstone and B. Silverman (2004). Needles and
Straw in Haystacks: Empirical-Bayes Estimates of
Possibly Sparse Sequences. The Annals of Statistics,
32, 1594–1649.
B. Jones, C. Carvalho, A. Dobra, C. Hans, C. Carter
and M. West (2005). Experiments in Stochastic Computation for High-dimensional Graphical Models. Statistical Science, 20, 388-400.
It is reassuring that the theoretical insights of Section
2 regarding sparsity and robustness can be observed
in practice, as we have demonstrated through a variety of experiments. Moreover, it is surprising that in
all situations where we have investigated the matter,
the answers obtained by the horseshoe closely mimic
those arising from the gold standard for sparse estimation and prediction: Bayesian model averaging across
discrete mixture models. This is an interesting (and as
yet under-explored) fact that may prove very useful in
ultra-high-dimensional situations, where the computational challenges associated with BMA may be very
cumbersome indeed.
Meinshausen, N. and Buhlmann, P. (2006). High
dimensional graphs and variable selection with the
Lasso. Annals of Statistics 34, 1436–1462.
T. Mitchell and J. Beauchamp (1988). Bayesian Variable Selection in Linear Regression (with discussion).
Journal of the American Statistical Association, 83,
1023–1036.
L. Pericchi and A. Smith (1992). Exact and Appropriate Posterior Moments for a Normal Location Parameter. Journal of the Royal Statistical Society B 54,
793–804.
Additional detail concerning these issues can be found
in working papers available from the authors’ websites.
Acknowledgements
N. Polson (1991). A Representation of the Posterior
Mean for a Location Model. Biometrika, 78, 426–430.
The first author acknowledges the support of the IBM
Corporation Scholar Fund at the University of Chicago
Booth School of Business, and the third author that of
a graduate research fellowship from the U.S. National
Science Foundation.
J. G. Scott and J. Berger (2006). An Exploration of
Aspects of Bayesian Multiple Testing. Journal of Statistical Planning and Inference, 136, 2144-2162.
J. G. Scott and J. Berger (2008). Bayes and EmpiricalBayes Multiplicity Adjustment in the VariableSelection Problem. Discussion Paper 2008-10. Duke
University Department of Statistical Science.
References
J. Berger (1980). A Robust Generalized Bayes Estimator and Confidence Region for a Multivariate Normal
Mean. The Annals of Statistics, 8 716–761.
J. G. Scott and C. Carvalho (2008). Feature-inclusion
Stochastic Search for Gaussian Graphical Models.
Journal of Computational and Graphical Statistics, 17,
790-808.
C. Carvalho, N. Polson and J. G. Scott (2008). The
Horseshoe Estimator for Sparse Signals. Discussion
Paper 2008-31. Duke University Department of Statistical Science.
W. Strawderman (1971). Proper Bayes Minimax Estimators of the Multivariate Normal Mean. The Annals
of Statistics, 42, 385–388.
C. Carvalho, N. Polson, J. G. Scott and S. Yae (2009).
Bayesian Regularized Regression and Basis Expansion
via the Horseshoe. Working Paper.
R. Tibshirani (1996). Regression Shrinkage and Selection via the Lasso. Journal of the Royal Statistical
Society B, 58, 267-288.
C. Carvalho and J. G. Scott (2009). Objective
Bayesian Model Selection in Gaussian Graphical Models. Biometrika (to appear).
M. Tipping (2001). Sparse Bayesian Learning and the
Relevance Vector Machine. Journal of Machine Learning Research, 1, 211-244.
A. Gelman (2006). Prior Distributions for Variance
Parameters in Hierarchical Models. Bayesian Analysis, 1. 515–533.
E. George and R. McCulloch (1993). Variable Selection via Gibbs Sampling. Journal of the American
80