Section 6.2. The Equation of a Plane in R3
advertisement

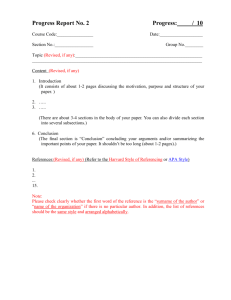
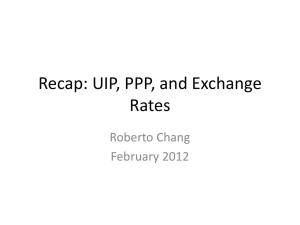
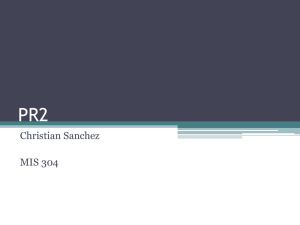
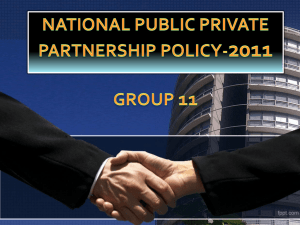
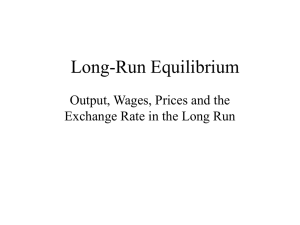
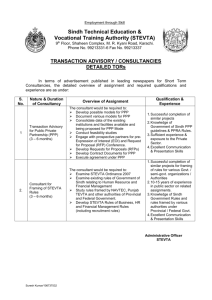
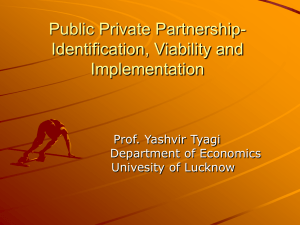
Section 6.2. The Equation of a Plane in R3 Recall : In R2 , the set of all points whose coordinates satisfy an equation of the form ax + by = c (e.g. x + 2y = 3) forms a line. A similar equation in R3 might be something like ax + by + cz = d; e.g x + 2y − z = 3. Question: If P is the set of all points in R3 whose coordinates (x, y, z) satisfy x + 2y − z = 3 (e.g P includes (1,1,0), (4,0,1) etc.) what kind of geometric object is P ? Answer: Let ~n = [1, 2, −1] (The components of ~n are the coefficients of x, y and z in the equation). Let A denote the point (1, 1, 0). Then A belongs to P since 1 + 2(1) − 0 = 3 i.e. the coordinates of A satisfy the equation describing P . Let B = (x1 , y1 , z1 ) be an arbitrary point of R3 . Then B ∈ P if and only if x1 + 2y1 − z1 = 3. ~ Its components are given by : Form the vector AB. ~ = [x1 − 1, y1 − 1, z1 − 0] == [x1 − 1, y1 − 1, z1 ] AB Then ~ = ~n.AB = = = [1, 2, −1].[x1 − 1, y1 − 1, z1 ] 1(x1 − 1) + 2(y1 − 1) − 1(z1 ) x1 − 1 + 2y1 − 2 − z1 x1 + 2y1 − z1 − 3 ~ if and only if In particular ~n ⊥ AB x1 + 2y1 − z1 = 3 i.e. if and only if B belongs to P . ~ where Conclusion: P consists of all those points B for which ~n ⊥ AB (i) A = (1, 1, 0) is a (fixed) point of P (ii) ~n is the vector [1, 2, −1] 1 pppppp pppppppppp ppp pp p pp ppp p p pp p pp n = [1, 2, −1] ppp p p ~ pp p pp ppp p p p pp pp p r ......... ..... ............ ...... ..... .... ...... . . . . ...... ..... ...... ...... ..... . . . . ...... ... . . ...... . . ...... ... . . . . ...... .... ...... . . . . . ........... ...... ... . . . ...... . ....... ... . ..... . . . . ... ... . . . . ... ... . . . . . ... ...... .............. ... . . . ...... . . . . .......... ... .. ...... ....... ..... ... ...... ....... ..... ...... ... ....... ..... ...... . . . . . . . . ....... ...... ... .... . ...... . . . . . ... ....... . ...... ....... ... .......... . ...... ....... ....... ...... . ...... . . . . . . ... ...... ....... ... ...... . . ...... ...... . . ....... ... .. ...... ...... . . . . . . . ....... .. .. ................. ...... ...... .......................................................... . . . . . . . . . . . . . . . . . . ...... . . ...... . . . . . . . . . . . . . . . . . . . . . ................................................. ...... ...... . . . . . . . . ...... ...... .. ................ ...... ...... . . ... ..... ...... ...... . . ...... ...... ... ....... ...... ...... .. . . . ... ....... ...... ...... ......... . ...... ...... . . . ...... . ... .. ...... ...... . . . . . . ... ...... ...... ................... ... ...... ...... . ...... ...... ... ...... ...... ... ...... ...... ... ...... . ..... ... ...... ..... ...... . ... ..... ...... . . . . . ...... ... ... . ...... . . . . ...... .... .............. ...... ..... ....... ...... ..... ...... ..... ...... ..... ...... . . . . ...... .... ...... .... ...... ..... ...... ..... ...... ..... ...... . . . . . ...... ...... ..... ...... ..... ...... ..... ...... ..... ...... .... . . . ...... . ... ...... ...... ......... .......... A P What does this look like physically? -A plane (a copy of R2 inside R3 ). Vectors lying within the plane are orthogonal to ~n. Fact 6.2.1: An equation of the form ax + by + cz = d, where a, b, c and d are constants, describes a plane in R3 . Definition 6.2.2: Let P be a plane in R3 . A vector ~n is said to be normal to P ~ (or called a normal vector for P ) if ~n is perpendicular to P . This means ~n ⊥ AB whenever A and B are points in P . Remark 6.2.3: If the equation of P is ax + by + cz = d, then the vector ~n = [a, b, c] is normal to P . Furthermore, any vector which is normal to P is a non-zero scalar multiple of this ~n. Note: The vector [1, 2, 3] is normal to both the planes P1 : x + 2y + 3z = 1 and P2 : x + 2y + 3z = 20. This means that these planes are parallel. ....... ....... .... ............... .... .............. ........ ....... ..... ..... ........ ....... .... .... ....... ........ .... .... . . . . ....... . . . . . . . ........ .. ....... . .... . . . . . . . . . ....... . ........ .... ... ....... . . . . . . . . ....... ... ... . . . . ....... . . ....... ... ... . . . . . . ....... ... ... . . ...... . . . . ... ... . . . . .... . . ... ... . . ..... . . . . .... ... ... . . . . . . . . . ... ... ... . . . . . . . . . ... ... ... .... .... ..... ..... ......... ..... ..... ..... . ..... ..... ..... .... .... .... . . . . . . . . . . . . . . ..... . ... ... ... .... .. .... .... .... ... ... ..... ..... ..... .. .... . ..... ..... ..... ..... .... .... .... . . . . . . . . . . . . . . ........ ... ... .... .... .. ..... ..... ..... ..... ..... ..... .... .... .... . . . . . . . . . ... ..... ..... .... .... .... ..... .......... .......... .... ....... ....... .... ....... ....... . . . . ....... ....... ... ....... ....... .... ... ....... ....... ..... .... .............. ....... .... .... ....... ....... .... ....... . .... . . ....... . . . . ....... . ....... ... ....... .... ....... .... ....... .... ....... ....... ........ ....... ........ .......... ..... . qpppppppppppp ppppppppp pppppppppppppp pppppppppppppp pppppppppppppp pppppppppppppp p p p p p p p p p p p p p p ppppp ppppppppppppppppppppppp 2 The normal vector specifies the “orientation” of a plane but not its location in R3 , in the way that the slope of a line in R2 specifies its orientation but not its location. To fully specify a plane in R3 , we need both a normal vector and a point belonging to the plane. Example 6.2.4∗ : Find the equation of the plane P which contains the point (2, 0, 1) and to which the vector ~n = [1, 4, −1] is normal. Solution: Since [1, 4, −1] is normal to P , the equation of P has the form 1x + 4y − 1z = d for some constant d. The value of d is determined by the fact that the point (2, 0, 1) belongs to P , hence x = 2, y = 0, z = 1 must satisfy the equation of P . This means : 1(2) + 4(0) − 1(1) = d =⇒ d = 1 Equation of P : x + 4y − z = 1. Example 6.2.5∗ : Let P1 be the plane with equation 2x − y + 3z = 2. (a) Find the equation of the plane P2 which is parallel to P1 and contains the point (1, −1, −1). (b) Find the distance between P1 and P2 . Solution: (a) The vector ~n = [2, −1, 3] is normal to P1 . Since P2 is parallel to P1 , ~n is normal to P2 also; P2 has equation 2x − y + 3z = d Since the point (1, −1, −1) belongs to P2 , 2(1) − (−1) + 3(−1) = d =⇒ d = 0 Equation of P2 : 2x − y + 3z = 0 (b) Let h be the distance between P1 and P2 . . ...... ... ... ~n ......... ......... ......... ......... ......... ......... ......... ......... ......... ......... ......... ......... ......... ..... ......... ......... ......... ......... ......... ......... ......... ......... ......... ......... ......... ......... ......... ..... qA .. ...... ........ . ... ... . ... . ... . ... . ... . ... . ........ ....... . h .......... .......... .......... .......... .......... .......... .......... .......... .......... .......... .......... .......... .......... .......... ... ..... ... . ... .. .. .. ... ... . ... ... .... ... ... ... .... ...... ... ... ....... ........... .. ........ ... .. . ................. .............. ... .... .......... .... .......... .... .......... .... .... .......... .... .......... .......... . . .......... .......... .......... .......... .......... .......... ... P2 ~ AB q B 3 P1 To find h:1. Choose any point A on P2 e.g. A=(1,-1,-1) 2. Choose any point B on P1 P1 : 2x − y + 3z = 0 Setting y = 0, z = 0 gives x = 1 =⇒ (1, 0, 0) belongs to P1 . Let B = (1, 0, 0). ~ 3. Form the vector AB ~ = [1 − 1, 0 − (−1), 0 − (−1)] = [0, 1, 1] AB Then ~ h = ||proj~n AB|| where ~n is a vector normal to both P1 and P2 : ~n = [2, −1, 3]. ~ |[0, 1, 1].[2, −1, 3]| 2 ~ = |AB.~n| = p =√ h = ||proj~n AB|| 2 2 2 ||~n|| 14 2 + (−1) + 3 2 Distance between P1 and P2 : √ . 14 Remark: The above method can also be used to find the distance form a point A ~ where ~n is normal to P and Q is to a plane P in R3 . This is given by ||proj~n QA|| any point on P . qA ................ .......... ..... ................ ................. ................ ..... ............ . ................ ..... ............... ................ . . . . . . . . . . . . . . . . . . . . ..... .. ... ......... ..... ................... ..... ....... ..... ..... ..... .......... ..... ..... ... ... ..... ..... . .. ..... . . . ..... ..... .... ..... . ..... ..... ............. ..... ..... ..... .......... ..... ..... ......... ..... ..... ....... ... . . . . ..... . . ... ...... ..... ..... ..... ..... ..... ..... ..... ..... ..... .............. ..... ..... ..... .......... ..... ..... . ..... . ....... . . . ..... ..... ....... .... . . . . . . . . . . . ..... ........ ..... .. ..... .. ..... ..... .......... ..... ....... ........ ..... ....... ..... ..... ....... . . ..... . . . . ..... .... ..... ..... ....... ..... ..... ....... . . . ..... . ..... ..... ..... ..... ..... ..... ..... ..... ..... ... ..... ......... ..... . ............... . . . . . . ..... . . . . . . . . . .......... ..... . . . . . . . . . . . . . . . ..... ........... ..... ................ ........................ ~ QA p Q q ~n P Problem: Suppose A, B and C are points in R3 which are non-collinear (i.e. all three do not lie on the same line). Then A, B and C are the vertices of a triangle in R3 . This triangle may be “filled in” to form a “triangular disc”, which can be extended to form a unique plane P in R3 , in the way that a line segment in R2 can be extended to form a unique line. This plane P is the only plane in R3 which contains the points A, B and C - just as it takes two distinct points to determine a line, it takes three (non-collinear) points to determine a plane. 4 .......... ..... .......... ..... ..... ..... .... . . . ..... ..... ..... ..... .... . . . ..... ... . ..... . . ..... ... . . . ..... ... . ..... . . ..... ... . . . . . . ..... . .... ... . . ..... . . . ..... . ... ... . . . . . ..... . .... ... . . ..... . . . ... ..... .. ... . . . . . ..... ... . ... . ..... . . . . . ... ..... . ... . . . . . ..... ... . ... . . ..... . . . . ... ..... .. ... . . . . ..... . ... . ... . ..... . . . . . ... ..... . ... . . . . . ..... . ... . ... . ..... . . . . ... ..... . ... . . . . . . ..... ... .. ... ..... . . . . . ... ..... . ... . . . . . ..... . ... . ... ..... . . . . . ... ..... . ... . . . . . . ..... ... .. ... ..... . . . . . ... ..... ...... ......... . ..... ... ..... ...... ..... ..... . ...... ... ..... ..... ...... ..... ... ..... ...... ..... . . . . ...... ..... ... ..... ..... ...... ..... ... ..... ...... ..... . . ..... ...... ... ..... ..... ...... ..... ... ..... ...... ..... . . ..... ... ...... ..... ..... ...... ..... . ... ..... ...... .. . ..... ... ...... ... ..... ...... . ... ... ..... . ...... . . . ... ..... ...... .. ..... . . . ...... ... ..... ... ...... ..... .. ... ...... ..... ... ...... ..... ..... ... ...... ..... .. ... ...... ..... .. . . . ..... ... ...... . ...... ...... ... .... ...... ... ... ...... ... ...... ... ...... . . . ...... .. ...... ... ...... ... ...... ... ...... ... ...... . . ...... ... ...... .. ...... ... ...... ... ...... ... ...... . . ...... .. ... ...... ...... ...... ......... A C P B If we know the coordinates of A, B and C, how do we find an equation for P ? Example 6.2.6∗ : (Summer 2001 Q3 (b)) Find the equation of the plane P in R3 which contains the points A(1, 2, 1), B(2, 4, 1) and C(−1, 0, 3). Partial Solution: We need a normal vector ~n for P . p p p p p p p p p p p ppppp ppppppppppppp p p ppp p p p p p p p p ppppp ppp ...... ppppppppppppp ............ p p p p ppp p p p p .... ~ p p p p p ... n p p p p p p ppp ... ppppppppp ......q p ... p p p p p ppp p p p ... p . ... pppppppp ............ p p p ppp p p p ... p B(2, 4, 1) p . p p . p p p ... p . p p p . p ppp p . p ...ppppppp .. p..... p p p p p .. p ppp p . p p p . p p p p ... .. p p p . p p p . ppp ... .. ppppppp p p ... p p p p .. p p . p ppp p . p . p ... . pppppp ... ... ppp . . . . ppp ... .. ... ppp . ppp ... .. .. ... ppp . q . . ppp ... . ................... . . . pp ... . .. ....... . ppp .. ... ....... . . .. . . . . . . C(−1, 0, 3) ppppppp ppp .. ....... ....... .. . . . . . . . . . ppp . pppp ppp ...... ... ....... ppp .. ppppppppppppp ....... p p p p p .. ....... p . p . p . . . p . p . . p p ppp ...... .. ....... .. ppppppppppppp ....... ppp ... ....... ppppppp ppppp p p ... ....... p p p ppp p p p .. ............. p p . p ppp .. ...... ppp ..q....... ppppp ppppppp ppp pppppppp pppp p p p p p p p p p p p ppp pp ppppp ppppppp ppp A(1, 2, 1) ppppppppppppp p p p p ppp p p p p p p ppp p p p p p p p p p p p p p p p p p p p p p p ~ and AC ~ lie within P : The vectors AB ~ = [2 − 1, 4 − 2, 1 − 1] = [1, 2, 0] AB ~ = [−1 − 1, 0 − 2, 3 − 1] = [−2, −2, 2] AC 5 Thus ~n must be orthogonal to both [1, 2, 0] and [−2, −2, 2]. How do we find a vector which is orthogonal to both of these? The answer requires a construction known as the cross product. 6