Common principle of guidance by echolocation and vision
advertisement

J Comp Physiol A (1992) 171:563-571
Journal of
Comparative
Neural,
~
"'
and
P h y s i o l o g y A P.~.v~r.,
h~l~y
9 Springer-Verlag1992
Common principle of guidance by echolocation and vision
David N. Lee 1, F.R. (Ruud) van der Weel 1, Tris Hitchcock 2, Eddie Matejowsky2, and John D. Pettigrew z
t Department of Psychology,University of Edinburgh, 7 George Square, Edinburgh EH8 9JZ, Scotland
2 Vision, Touch and Hearing Research Centre, Department of Physiologyand Pharmacology,The University of Queensland, St. Lucia
Qld 4072, Australia
Accepted August 26, 1992
Summary. 1. Using echolocation, bats move as gracefully
as birds through the cluttered environment, suggesting
common principles of optic and acoustic guidance. We
tested the idea by analysing braking control of bats
(Macroderma gigas) flying through a narrow aperture
with eyes covered and uncovered.
2. Though braking control would seem to require
rapid detection of distance and velocity and computation
of deceleration, simpler control is possible using the tau
function of any sensory variable S that is a power function of distance to aperture. Tau function of S is z(S) =
S/g (the dot means time derivative). Controlled braking
is achievable by keeping ~(S) constant.
3. Previous experiments indicated the ~(S) constant
procedure is followed by humans and birds in visually
controlling braking. Analysis of the bats' flight trajectories indicated they too followed the braking procedure
using echolocation.
4. The tau function of echo-delay or of echo-intensity
or of angle subtended by directions of echoes from two
points on the approach surface could be used to control
braking. Aperture size was modulated during flight on
some trials in an attempt to test between these possibilities, but the results were inconclusive.
Key words: Echolocation - Vision - Locomotion - Bats
- Perceptual guidance
Introduction
The sonar worm of an echolocatin 9 bat
Bats use the echoes of their cries to locomote around the
cluttered environment. This remarkable ability was first
studied by Griffin and others (Griffin 1958; Griffin et al.
1958; Grinnell and Griffin 1958) 30 years ago. It has been
found, for example, that Myotis lucifugus can almost
Correspondence to : D.N. Lee
perfectly avoid vertical wires of only 0.3 mm diameter
when flying at 3-4.4 ms -1 (Griffin 1958, p. 357) while
Asellia tridens can reliably negotiate wires as thin as
0.065 mm (Gustafson and Schnitzler 1979). By exploring
the environment, bats can also build up a precise spatial
memory: Neuweiler and Mthres (1967) found that
Megaderrna lyra could remember the location of apertures to an accuracy of 2 cm.
How is echolocation used to navigate, negotiate
obstacles, land on surfaces - in short, get around in the
world? Recent studies of echolocation, concentrating on
object detection and perception of object movement, cast
some light on this question. All species of echolocating
bats use broadband sonar signals which normally contain a high to low modulation of frequency. Frequencies
range from about 10 to 100 kHz. The echoes from the
broadband signals appear to be useful in obtaining information about the location, shape and texture of targets (Simmons 1989).
Some species of bat also use narrowband signals of
constant frequency. The echoes from such signals appear
to be helpful in perceiving target motion from echo Doppler-shifts (Schnitzler and Henson 1980). This perceptual
process is sharpened by some bats who lower their emission frequency so as to exactly compensate for the Doppler-shift due to their own flight movement (Schnitzler
1973).
Movement of a target can also be detected with extreme acuity by means of change in echo-delay (the time
interval between sound emission and returning echo).
In experiments where simulated jittering targets were
presented to Eptesicus fuscus, Simmons et al. (1990)
found a fine delay acuity of 10 ns, which corresponds to
a movement in depth of only 0.0015 mm. In detecting
insects on the wing, such fine discrimination seems to be
facilitated by the bat's directional emissions, directional
hearing, middle ear muscle contractions and head
aiming, all of which tend to stabilize echo-amplitudes
(Kick and Simmons 1984). Neurophysiological studies
have shown how such abilities are reflected in elegant
brain architecture (Suga 1988).
564
While detection of objects and object movement is of
value in controlling locomotion, it is only part of the
story. As Webster (1967) pointed out in summarizing the
early locomotor studies, a bat flying through a cluttered
environment behaves as though it obtains through its
sonar system an ambient view of the environment. How
is this ability possible? When a bat is flying through
foliage chasing an airborne insect, as many bats do, the
bat's high frequency cries are reflected back from different directions from the surrounding surfaces. Since the
bat is moving, this array of reflected sound is continuously changing. In short, there is a flow field of reflected
sound at the bat's head. Since this is all the bat has to go
on to avoid colliding with branches and capture its prey,
the acoustic flow field must be providing information for
guidance which is on a par with that available in the optic
flow field of a bird.
For a flow field to provide information it must be
structured. The optic flow field is structured because of
the differing light reflecting properties of the surrounding
surfaces. Likewise, the acoustic flow field is structured by
the differing sound reflecting properties of the surfaces.
Thus the acoustic flow field can be conceived as a bundle
of differentiable acoustic cones analogous to the optic
cones constituting the optic flow field (Lee 1980).
The acoustic flow field is not, in general, isomorphic
with the corresponding optic flow field, since acoustic
texture elements of surfaces (facets and patches of different sound reflectance) do not necessarily coincide with
optic texture elements. However, the basic structure of
the acoustic flow field is the same as that of the optic flow
field. Therefore, the acoustic flow field can provide similar information about the movement of the animal and
the layout of the environment. In particular, the theory
of available information in the optic flow field (Lee 1980),
in principle, equally applies to the acoustic flow field.
There is also additional information in the acoustic flow
field of an echolocating animal provided, e.g., by echodelays.
As regards perceptually registering the structure of the
acoustic flow field, it is well known that the human
auditory system is capable of detecting the direction of
sounds by a variety of means - time and intensity differences at the two ears, changes in the spectral composition of the sound due to multiple reflections in the
pinnae and head shadow effects, and the changes in all
these which result when there is movement of the head
or sound source (Moore 1989 for review). In many species of bat, too, interaural differences in intensity and
arrival time of sounds play an important part in determining the directions of sounds (Schnitzler and Henson
1980), while other species can perform well monaurally,
presumably exploiting the multiple reflections at the pinnae and head shadow effects. Furthermore, the registering of sounds is not confined to a single direction at a
time. An array of different sounds can be perceived simultaneously- as when in front of an orchestra - j u s t as
a visual scene can be perceived as a whole. It is, therefore,
reasonable to assume that an echolocating bat can register the acoustic flow field generated by its cries.
D.N. Lee et al.: Echolocation and vision: common principles
Theory of control of velocity of approach
Many locomotor actions require controlling velocity of
approach to a destination, as when a bat lands on a perch
or a driver stops behind another vehicle. In the present
study we analysed the approach of bats to an aperture
in terms of a general theory of control of velocity of
approach. We will first outline the theory and then describe how approach might be controlled using echolocation. The implications of the theory are summarized in
Fig. 1 and details are given in Appendix 1. To illustrate
the theory we consider linear approach of an animal to
a surface. The theory, however, applies to approach
along any dimension - e.g., rotary approach along the
angular dimension, as when orienting.
The tau function. S u p p o s e a n a n i m a l is a p p r o a c h i n g a
surface. T h e n the r a t i o o f its d i s t a n c e a w a y at a n y time
to its speed o f a p p r o a c h p r o v i d e s a first o r d e r e s t i m a t e
o f its t i m e - t o - c o n t a c t with the surface. I f the velocity o f
a p p r o a c h stays c o n s t a n t t h e n the r a t i o p r o v i d e s an acc u r a t e estimate, b u t if velocity d e c r e a s e s / i n c r e a s e s the
r a t i o u n d e r / o v e r e s t i m a t e s t i m e - t o - c o n t a c t . T h e r a t i o has
been t e r m e d the tau-margin (Lee a n d Y o u n g 1986). F o r
the m o r e general t h e o r y , we use the i d e a o f the tau
function.
A
:~
animal
-X
~,
A
object
0
Implied movement Effect of keeping
of animal
acceleration/
deceleration constant
Effect of keeping
tau-dot constant
= 1
Constant velocity
Collides
(~ constant)
Collides
= 0.5
Decelerating
Stops at
Stops at
(braking constant)
Value of
tau-dot
(~)
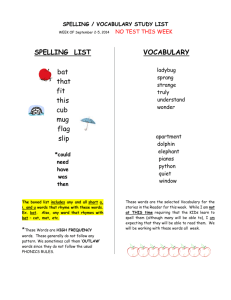
Fig. 1. A Notation for linear approach. At time t animal has
coordinate x (< 0) and is approaching surface with velocity ~ and
acceleration ~ (~ = dx/dt, ~ = d2x/dt2). Tau function of
x - x(x) = x/~. Tau-dot = rate of change of T(x) - "~(x). B Summary of implications of theory of control of velocity of approach
described in text
D.N. Lee et al.: Echolocation and vision: common principles
565
Suppose that a plane surface is being approached
head on and the point aimed at is at the origin O. At time
t we take the animal A to have coordinate x ( < 0) and to
be approaching O with velocity Jr and acceleration
(Fig. 1A). Then the taufunction o f x is defined as x divided by its rate of change over time (~). In symbols:
9(x) = x/~
(1)
It has been shown that, in theory, the value of z(x) is
directly derivable from the optic flow field and does not
need to be computed from information about distance
and velocity (see, e.g., Lee 1976 and Tresilian 1990).
Likewise, visual perceptual experiments using simulations of approaching surfaces have shown that the value
of T(x) can be perceived from the display without information about distance or velocity of the approaching
surface (Schiff and Detwiler 1979; Todd 1981). Experiments indicate that optically-specified T(x) is used to time
interception of moving objects by humans (Bootsma and
van Wieringen 1990; Lacquaniti and Maiolo 1989; Lee
et al. 1983; Savelsbergh et al. 1991) and to time locomotor actions when approaching surfaces by flies (Wagner 1982), birds (Lee and Reddish 1981), and humans
(Lee et al. 1982; Sidaway et al. 1989; Warren et al. 1986).
Stopping at an object. The rate of change with respect to
time of z(x) (= ~(x)) is a dimensionless quantity which has
the interesting property that it provides information for
controlling braking. Control of braking to avoid colliding with a surface might appear to require computing
appropriate deceleration on the basis of information
about current distance from the surface and velocity of
approach. However, this is not necessary. To avoid collision it is sufficient to register the value of t(x), adjust
braking so that t(x) < 0.5 and then keep braking constant. This procedure would generally result in stopping
short of the surface (see Fig. 1B).
A general procedure to stop at a surface is to adjust braking so that ~(x) stays constant at a value k,
0 < k <0.5 (Fig. 1B). Following this procedure requires
steadily slackening off the brakes as the surface is approached (except for k = 0.5 when deceleration is constant). Analysis of braking behavior of test drivers indicated that they followed the stop-at procedure with
k = 0.425 (Lee 1976).
Controlled collision. If i(x) is kept constant at a value k
between 0.5 and 1.0 then braking has to get progressively
harder as the object is approached. In fact, stopping at
an object in this way theoretically requires reaching infinite braking force. A realistic procedure - the controlled-collision procedure - is to keep ~(x) constant at a
value between 0.5 and 1.0 until maximum braking power
is reached, and then maintain this braking force. This
would result in the animal colliding with the object but
in a controlled way (Fig. 1B). Film analysis of a hummingbird aerial docking on a feeder tube indicated it
followed the controlled-collision procedure; as it braked
it held ~(x) constant at a mean value of 0.71 and its bill
passed into the feeder rather than stopping at the opening (Lee et al. 1991).
Information through echolocation for controlling
approach
How might bats detect x(x) to control braking ? As shown
in Appendix 2, the tau function of any sensory variable
that is a power function of distance is proportional to the
tau function of distance ~(x). Therefore it is likely that
bats might detect T(x) by registering the tau function of
an acoustic variable that is a power function of distance.
Possible variables are as follows (see Fig. 2 and Appendix 2 for details):
1. Angle subtended at head by the directions of the
echoes from any two elements on the approach surface.
2. Echo delay, the time interval between the start of
emission of a sound pulse and start of the echo returning
from a surface element.
3. Intensity of echo of a sound pulse of constant intensity.
Since each of the 3 variables is defined within each
pulse-echo pair, information for controlling timing and
braking could, in principle, be derived from a single
sound pulse and its echo.
Though there are no reported experimental investigations of timing or braking control using echolocation, a
recent study by Schiff and Oldak (1990) is relevant. They
presented to people sound films of approaching trucks,
cars and speaking people, using the sound only, the
picture only and both the picture and sound. The film
was turned off at a variable time during the approach and
the subject had to indicate when the vehicle or person
would have contacted them. For time-to-contacts up to
4 s, judgments with sound only were as accurate as with
picture only or with both picture and sound. Since the
sound was recorded and played back through a single
channel, interaural time or intensity differences could not
X
direction
ani
Echo
"~
of
locomotion
layd a r
Echo intenstty Icc r - 2
~
/
M surface
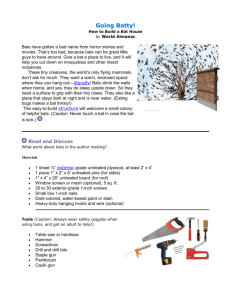
Fig. 2. Three acoustic variables that could bc used in registcring
z(x) and ~(x):(l) (Small) angle 0 defined by the directions of
echocs from any two surface clements close to direction of locomotion or, morc gencrally, angle ~b defined by direction of locomotion and direction of echo from any surface elemcnt.
~(x) = - - ~ ( 0 ) = -z(tandp). (2) Echo-delay, d (i.e., time between
emission of sound and return of echo). ~(x) = T(d) cos 2 ~b. (3) Intensity, I, of echo of sound of uniform intensity. ~(x) = -2"~(I) cos 2 4.
See Appendix 2 for details
566
D.N. Lee et al.: Echolocation and vision: common principles
have informed about time to contact: the information
the subjects were using must have been available monaurally. A likely candidate is the tau function of intensity,
since Rosenblum et al. (1987) found that intensity change
is the most effective information for locating moving
sound sources.
Methods
We chose the ghost bat (Macroderma gigas) for study because it
can use either echolocation or vision to guide itself. The bat inhabits
caves in tropical Australia and hunts small rodents.
Three bats were trained with food reward to fly down a horizontal matt-black plywood tunnel (6.45 m long, square crosssection 70 cm • 70cm with 1.00 m vertical and horizontal diagonals)
and out the other end through a centred square aperture. The bats
were released individually from the hand at the start end of the
tunnel. During training, the aperture was progressively reduced to
the minimum size the bat could reliably fly through, albeit by
modifying its flight pattern (wing-span approximately 70 cm ; 22 cm,
32 cm, 31 cm minimum diagonal of aperture for bats GR, BL, BBL,
respectively). Thus the task required precise control of approach.
A 250 W high pressure sodium light with reflector was mounted at
the start end of the tunnel and illuminated its interior. The bat's
movement along the tunnel was monitored by 56 infra-red light
Variable
Square
i
Aperture
gates across vertical diagonals at 10 cm intervals and by a video
camera at the start end (Fig. 3).
After training, each bat made 36 test flights (with food reward)
using normal vision and hearing, followed by 36 with eyes covered
with small patches. Each set of 36 test flights comprised 3 sessions
of 12 flights conducted on separate days. On a r a n d o m 24 of each
set of 36 test flights the aperture was dilated from the minimum size
for the bat to 70 cm • 70 cm. The dilation was regulated on-line by
a transputer, using information from the infrared light gates about
the bat's changing position. The formula for the dilation (see Appendix) was such as to make the aperture appear a certain fixed time
closer than it actually was (assuming the bat was perceiving time-tocontact through the tau function of the angle subtended by the
aperture - variable(l) above). On a r a n d o m 12 of the 24 aperture
dilation trials, the simulated time shift was 100 ms, on the other 12
it was 200 ms.
On each trial, a computer recorded the times when each of the
56 infrared light gates was broken by the bat flying past. F r o m these
data, two data series were computed, giving (1) the time taken by
the bat to go from each gate to the aperture (the time-to-contact)
and (2) the time taken to reach each gate from the preceding gate
(the inter-gate time). Each data series was smoothed with a rectangular filter spanning five points. The inter-gate separation (10 cm)
divided by the smoothed inter-gate time was taken as the measure
of the bat's velocity (k) past a gate. The distance (x) of the gate from
the aperture divided by the velocity (k) past the gate was taken as
the measure of x(x)= x/~ at the gate. To test the experimental
hypothesis, for each trial the x(x) data series was plotted against the
time-to-contact data series.
!
6.45 m
!
I
I
5.60 m
I
I
I
T
I
I
!
_~10 cm~_
Sodium Light
I
I R gates
/
I
r
lm
1
Synchronizing
Signal
Cable
motor
Controller
Computes
aperture
dilation from
IR gate times
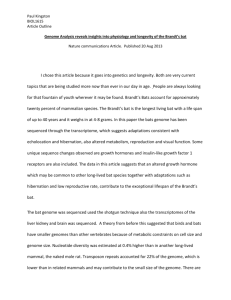
Fig. 3. The timing tunnel. The bat was released from the right-hand
end of the tunnel (painted matt-black inside and illuminated by high
intensity sodium lamp) and flew out through a variable aperture at
the other end where it received a food reward. The bat's progression
down the tunnel was monitored by video and by IR gates (infra-red
emitters and receivers arranged in pairs, one vertically above the
other) at 10 cm intervals. These fed into a transputer which recorded
the times when the IR gates were broken. On some test trials the
aperture was kept constant at the smallest size that pilot tests had
shown the bat could just fly through reliably. On other trials, the
omuer
Stores I R gate
times and
computes t a u and
time-to-contact
with aperture
transputer used the IR gate times to compute the bat's position and
velocity and applied this information to continuously increasing the
size of the aperture as the bat approached. This was to test whether
the bat was perceiving time-to-contact with the aperture by means
of the tau function of the changing angle subtended by the aperture
at the bat's head (the aperture was regulated to make it appear to
the bat that it was a certain fixed time closer to the aperture than
it actually was). On all trials the IR gate times were used to compute
how z(x) for the aperture varied with time-to-contact
D.N. Lee et al.: Echolocation and vision: common principles
Bat BL with hearing & no vision
A
Bat BL with
& vision
hearing
-~0
-~a
~
567
.0.0
-oJI
- .O.4
1]
j
..o.8
,~6
u
,-o.8
"~
7) --tJ
tau-dot = 0.847 (0.107)
tau (0) = -0.025 (0.030) "-1.4
n
= 10
,
. . . .
,
,
-1.8
-1.8 -1.4 -1..~ -I.0 -0.8 -O.S -0.4 .O.2 0.0
Bat BBL
with
hearing
& no vision
.-in
rI
=
=
=
=
tau-dot
.1.8
0.969 (0.019) -1-2
0.953 (0.1471
0.002 (0.05~ -IA
11
.
-1.8
tau (0)
n
. . . . .
-L2 -I.O -o.8 -o.6
.
.I.4
Bat BBL
with
hearing
-O,4
-0.2
o,o
& vision
-~o
C
~
.-o.~
,
,
-I.6 -IA -IJ
Bat
r=
tau-dot
tau (0)
n
. . .
-1.0 -o.8
D ~
-~.8
,-oA
- -o.4
9.o.6
- -o~
9-0.8
-~8
9.1.6
- -1.o
= 0.978 (0,018) .-1.8
ffi 0.753 (0.128)
= -0.029 (0.030) '-[4
=9
. .
-1.8
-o.8 -0.4 -0.2 -o.o
2) --l.s
= 0.972 (0.114)
= -0.013 (0.045) --L4
•9
. .
-1.8
-o.8 -O.4 .O.2 0_0
GR with hearing & no vision
~
,
E
tau-dot
tau (0)
n
,
,
. . .
.1.8 -|A -1.8 -1.0 -0.8
Pj
Bat
~0
..o.8
..OA
9-0,6
GR with hearing & vision
.o.o
-oO.0
9 -o.4
9 *oas
, .0,8
"-0.8
9-1.8
--t.o
r~
= 0.794 (0.144) "-1,2
tau-dot = 0.643 (0.203) [
tau(0)
= 0.194(0.098) i'ol,4
n
=9
. . . . . . .
-I.6
-1.8 .l~t -I.8 -1.0 .o.8 .o.6 -o.4 -0,2 ~6
~
= 0.913 (0.043) --lJ
= 0.092 (0.074)
tau (0) = 0.16fi (0.027) 9.i.4
n
= I0
-1.8
-1.6 *1.4 -I.S -1.0 -O.8 -0.6 .OA .O.30.O
t i m e - t o - c o n t a c t (s)
r~
tau-dot
time-to-contact
(s)
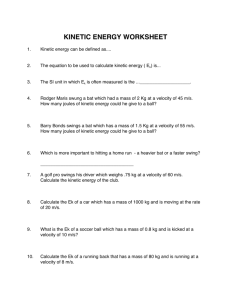
Fig. 4A-F. Plots of x(x) against time-to-contact with aperture at end
of tunnel for individual flights of the bats under the two perceptual
conditions: eyes covered and unrestricted hearing; unrestricted
vision and hearing. Means (standard deviations) of linear regression
coefficients of x(x) on time-to-contact are given in each panel.
r 2 values approaching unity indicate linearity - i.e., that t(x) (rate
of change of z(x)) was kept constant during deceleration, as
predicted
Results
Test of constant ~(x) hypothesis
The constant ~(x) hypothesis predicts that on approaching the aperture the bat will keep 4(x) constant. Thus the
plot of T(x) against time-to-contact should be linear. We
tested this hypothesis against the constant deceleration
hypothesis which predicts that the plot of/~ against timeto-contact should be linear. Since there was some variation in behaviour between bats and between sensory
conditions, the results were analysed individually.
Figure 4 presents the plots of z(x) (tau) against timeto-contact for individual flights, together with the means
and standard deviations of the linear regression coefficients, for the 3 bats, with and without vision.
The two female bats (BL and BBL) behaved similarly.
When flying with hearing and no vision (Fig. 4A, C), the
mean (sd) values of r z were respectively 0.970 (0.017) and
0.978 (0.018). The means are very close to a value of 1.0
representing perfect linearity. By contrast, the means
(sds) of r 2 for regressions of ~ on time-to-contact were
0.689 (0.179) and 0.715 (0.254), respectively. These mean
r z are significantly smaller than those for x(x), against
time-to-contact (P < 0.005 and P < 0.01, t-test). The data
therefore strongly support the constant ~(x) hypothesis.
The mean values of ~(x) (the linear regression slopes)
were 0.847 and 0.753, respectively. Both these values are
significantly less than 1.0 (P<0.01, t-test) and greater
than 0.5 (P < 0.005, t-test). This means that the bats were
decelerating towards the aperture on a "controlled collision" course (see Fig. 1).
For bats BL and BBL flying with both vision and
hearing (Fig. 4B, D), the mean values of r 2 for x(x)
against time-to-contact were again high (0.969 and 0.979,
respectively), but the mean values of ~(x) (0.953 and
0.972) were not significantly different from 1.0. This
means the bats were approaching the aperture at an
approximately constant velocity (see Fig. 1). Thus, these
data are consistent both with the constant ~(x) hypothesis
and with the constant ~ hypothesis.
For the male bat (GR), the mean (sd) r 2 for ~(x)
against time-to-contact were 0.794 (0.144) when flying
without vision and 0.913 (0.043) when flying with vision
(Fig. 4E, F). These means were significantly greater
(P < 0.05, P < 0.005 t-test) than the corresponding means
of 0.404 (0.257) and 0.763 (0.215) for x against time-tocontact. These data therefore support the constant ~(x)
hypothesis.
The mean values of "~(x) were 0.643 and 0.592. Both
values are significantly greater than 0.5, meaning the bat
was on a controlled collision course (see Fig. 1). That the
male bat used a smaller value of ~(x) than the females
relates to the fact he was braking more, probably because
he was flying through a 22 cm aperture compared with
a 31 cm or 32 cm one.
There was little difference in the curves of ~(x) against
time-to-contact when the bats were flying with or without
vision, which indicates that vision played a subordinate
role. This conclusion is corroborated by the fact that
when, in a separate experiment, the bats' ears were painlessly plugged with sound deadening material to test how
they could cope using vision alone, they refused to fly
down the tunnel. In contrast, their flying was not disturbed in the experiment where their eyes were covered
by small patches.
Effect of dilating the aperture
On some trials, the aperture was dilated so that, theoretically, it would appear a constant time nearer to the bat
than it actually was. (The apparent value of z(x) was, at
each instant, equal to the real value of ~(x) minus either
100 ms or 200 ms). If the bat had been mislead by this
manipulation, then it should have performed actions
preparatory to negotiating the aperture earlier than when
568
the aperture was of constant size. The dilation of the
aperture would not, however, be expected to affect the
constant ~(x) prediction for the control of deceleration,
since subtracting a constant from ~(x) does not affect
~(x).
From inspection of the video records of the flights
down the tunnel we were unable to find evidence that the
bats were performing a discrete act like folding their
wings as they approached the aperture. We also examined the data to see whether they were regulating the
timing of their wingbeats to make minimum wingspread
coincide with arrival at the aperture. The times of occur*
rence of minimum wingspread (at the top of the up*
stroke) were determined from the video records and the
timing information from the IR gates. The result, however, was negative. At the last minimum wingspread
before the aperture, neither the mean nor the standard
deviation of the time-to-contact with the aperture was
significantly different from chance. (At the observed
average wingbeat period of 140 ms, the chance values of
mean and standard deviation of time-to-contact at last
minimum wingspread are 70 ms and 41 ms, respectively.)
Nor were the means or standard deviations of time-tocontact significantly different when the aperture was dilated compared to when it was kept constant. In short,
from the available data, we were unable to find evidence
of preparatory timing and so could not determine whether or not dilation of the aperture affected preparatory
timing.
Discussion
The data support the hypothesis that in controlling
velocity of approach to a surface at distance, x, bats
regulate deceleration by keeping constant the dimensionless quantity ~(x), which is the rate of change of T(x)
(=x/i). Thus bats appear to control braking using
echolocation in the same way as birds (Lee et al. 1991)
and humans (Lee 1976) control braking using vision.
We have described 3 acoustic variables which could
provide information about z(x) by virtue of their tau
functions being proportional to z(x). The acoustic variables are: (1) angle subtended at the head by the directions
of the echoes from any two elements on the approach
surface; (2) echo delay, the time interval between the
start of a sound pulse and the start of its echo returning
from a surface element. ; (3) intensity of the echo of a
constant intensity sound pulse. It will be noted that these
variables have different dimensions (radians, time,
energy), but that is immaterial: the tau function of each
has the single dimension of time. The magnitude of the
sensory variable does not matter either. This may be seen
by contrasting a fast and a slow constant velocity approach by a bat to a surface. Assuming the bat makes
similar sounds on each approach, then at any time-tocontact, the angle subtended at the head by two surface
elements will be larger, the echo-delay will be shorter and
the echo intensity will be greater in the slow approach.
What is important for timing and braking control is not
the magnitude of the sensory variable but the magnitude
D.N. Lee et al.: Echolocationand vision: common principles
of its tau function, and this is independent of the velocity
of approach.
It was not possible to determine from the experimental recordings what acoustic variable the bats were using
in sensing ~(x). It could have been any one or all of the
variables listed above. Further experiments are needed to
answer the question. There is a pointer that echo-delay
might be implicated in sensing x(x). Suga (1984) found
cells in the auditory cortex of the mustached bat
( Pteronotus parnellii rubiginosus ) which were maximally
responsive to a particular (simulated) echo-delay and
Doppler shift, mimicking a surface at a particular distance approaching at a particular velocity. It is possible,
therefore, that the cell was responding to the ratio of
distance to velocity, i.e., to ~(x), but to test this, different
combinations of distance and velocity having the same
ratio would need to be presented to the animal to see
whether they produced an invariant response from the
cell. Certainly, some bats are very sensitive to change in
echo-delay (Simmons 1989). As regards the angle subtended at the head by echoes from a surface, it seems likely that bats use this acoustic variable, e.g., in perceiving
the width of gaps (as in the present experiment) or the
size of objects. It is possible they might also use the variable in sensing T(x).
Apart from its use in controlling braking, the tau
function of distance to a surface, ~(x), is valuable information for controlling timing during approach. ~(x)
is apparently used not only under constant approach
velocity, where it gives a precise measure of time-tocontact, but also under changing velocity, where ~(x)
provides a first-order estimate of time-to-contact. There
is, for example, evidence that x(x), registered visually, is
used by flies to trigger deceleration when landing (Wagner 1982), by gannets to trigger streamlining when
plunge-diving into the sea (Lee and Reddish 1981), and
by humans to time shock-absorption when landing from
a fall (Sidaway et al. 1989) and to time the hitting of a
dropping ball (Lee et al. 1983). It remains to be seen
whether bats use ~(x), registered acoustically, in similar
ways.
Tau is a powerful function for action systems on two
counts. First, the tau function of distance, ~(x), is valuable information for controlling timing and velocity of
movement. Second, the form of the tau function is such
that it could be registered by a variety of sensory means.
As shown in Appendix 2, all that is required is a sensory
variable, S, that is a power function of distance, x (i.e.,
S = kx% where k and a are constants) and then ~(x) is
given simply by the value of at(S).
We have provided several examples of appropriate
optic and acoustic variables. As an indicator of the
potential scope of the tau function, we conclude with an
example from an apparently quite different sensory modality - electroreception (Bullock and Heiligenberg
1986). In electrolocation by weakly electric fish, a nearby
object distance, x, from the fish distorts the electric field
generated by the fish around its body and induces a
change, S, in the transepidermal voltage on the fish,
where, approximately, S = kx -1"7 (Bastian 1986). Because k varies with the conductivity and size of the
D.N. Lee et al. : Echolocation and vision: common principles
569
o b j e c t , S c a n n o t , b y itself, s p e c i f y t h e d i s t a n c e x o f t h e
o b j e c t - j u s t as t h e v i s u a l a n g l e s u b t e n d e d b y a n o b j e c t
c a n n o t s p e c i f y its d i s t a n c e . H o w e v e r , in b o t h cases, t h e
t a u f u n c t i o n o f d i s t a n c e , x(x), is s p e c i f i e d - in e l e c t r o l o c a t i o n b y z(x) = - 1.7 x(S). S o m e o f t h e a b i l i t y o f e l e c t r i c
fish to g e a r t h e i r a c t i o n s t o t h e e n v i r o n m e n t c o u l d b e
e x p l a i n e d in t h i s w a y . T h e h y p o t h e s i s s u g g e s t s a p o t e n tially f r u i t f u l set o f e x p e r i m e n t s .
Acknowledgements. We thank Joyce Willock for help with the video
analysis. The research was supported by grants to the first author
from US Air Force Office of Scientific Research, Royal Society
(London) and British Council, and grants to the last author from
the Australian Federal Government's Commonwealth Special Research Centres Scheme.
Appendices
Appendix 1 ." Theory o f control o f approach
The theory, which applies to approach along any dimension, will
be illustrated by linear approach of an animal to a surface (Fig. 5A).
The point on the surface being approached is considered the origin
O and at time t the animal A has coordinate x (arbitrarily taken to
be less than zero) and is approaching O at velocity ~ and acceleration ~ (~ and ~ denote the first and second derivatives of x with
respect to time).
The taufunction of x is defined as x divided by its rate of change
over time (~). In symbols:
x(x) = x/~
(A1)
- z(x) is the time it would take the animal to reach O if it were to
continue at a constant approach velocity i.
The rate of change of z(x) ( = r
provides information for
controlling velocity of approach. To see this, we differentiate
Eq. (A1) with respect to time, obtaining:
r
= 1-xii/~ 2
(A2)
It is clear from this equation that, during approach to O (i.e.,
x < 0 and ~ > 0 ) :
r > 1 implies animal accelerating (i.e., i(> 0) and
time-to-contact < - z(x) ;
~(x) = 1 implies animal moving at constant velocity (i.e., ~ = 0) and
time-to-contact = - z(x);
~(x) < 1 implies animal decelerating (i.e., ~ < 0) and
time-to-contact > - z ( x ) .
Constant deceleration approach. Suppose the animal is decelerating
towards O with constant deceleration - ~ ( > 0). Then the stopping
distance from approach velocity ~ will be -~2/(2~). Therefore the
animal will stop short of O providing - ~ 2 / ( 2 ~ ) < - x, i.e., providing
x~/~ 2 > 0.5. Thus, applying Eq. (A2), the condition for stopping
short is
~(x)<0.5
(A3)
If {(x) = 0.5, the animal will stop at O.
Thus, though control of braking might appear to require information about the current distance from the destination, and
about the current velocity and deceleration of approach, none of
this information is strictly necessary. To avoid collision it is sufficient to register the value of ~(x), adjust braking so that ~(x)~ 0.5
and then keep braking constant. Application of this constant-braking procedure will necessarily result in ~(x) getting progressively
smaller over time and the animal stopping short of the destination
(except if~(x) = 0.5 when ~(x) will stay constant and the animal will
stop at the destination). Conversely, if deceleration is kept constant
when ~(x) is greater than 0.5, then ~(x) will get progressively larger
over time and the animal will collide with the destination.
Constant f(x) approach: stopping at a destination. To stop at a
destination it is suff•
to adjust braking so that ~(x) stays constant at a value k, 0 < k < 0 . 5 . The equations of motion resulting
from following this procedure are obtained by integrating Eq. (A2)
(substituting the constant value k for ~(x)). The equations of motion
are:
x/x o = (1 + kt/%) (l/k)
X/Xo = (1 + kt/%) (l/k)- 1
(A4)
(A5)
~(Xo/~2) = (1 - k)(1 + kt/zo)t 1/k)-2
(A6)
where - Xo,/%, - xo are, respectively, the animal's distance from the
destination and its velocity and deceleration of approach at time
t = 0. % = Xo//%.
We assume the animal is moving toward the destination O at
time t = 0 ; i.e., x o < 0 and ~o>0. Therefore % < 0 . Hence, from
Eq. (A4), X/Xowill decrease over time, i.e., the animal will continue
to approach O. (If the animal were moving away at t = 0, then by
A
L7
animal ~ - x
A
~ . object
0
B
1.00" tau,dot
1.00
0.1
i
0.80"
tau-dot
0~2
"~
0.80
0.9
0.60
0.8
0,0
2
0.3
0.60"
0.4
I
0,5
0,40"
0.6
0.7
0.20-
0.5
0,8
0,2
0.1
0.0~
-0.5
0.0
0.5
1.0
1.5
2.0
normalized time
2.5
3.0
0.00
-1.0
-0.8
-0.6
-0.4
-0.2
normalized distance
0.0
Fig. 5A-C. Theory of control of approach. A At time t animal has coordinate x ( < 0) and is approaching surface
with velocity/~ and acceleration
(~ = dx/dt, ~ = dEx/dt2). Tau function
of x = "~(x) = x//~. Tau-dot = rate of rate
of change of z(x) = "~(x). B and C Kinematic profiles when approaching surface
and braking so that "~(x) remains constant at the different values shown. If
0 < ~(x) < 0.5, deceleration monotonically
decreases (curves for ~(x) ( = taudot) = 0.1-0.4 in B) and object is just
reached (corresponding curves in C). If
~(x) = 0.5, deceleration is constant (horizontal line in B and surface just reached
(i(x)= 0.5 line in C). If 0.5<~(x)< 1, deceleration increases monotonically, as
shown by curves for ~(x) ( = taudot) = 0.64).9 in B; thick lines at top of
curves correspond to reaching a deceleration ceiling. Corresponding curves in C
show how velocity decreases
570
D.N. Lee et al. : Echolocation and vision: common principles
keeping t(x) = k it would move away from O.) Eqs. (A4--A6) may
then be normalized by writing:
normalized distance = (distance from destination)/(initial distance) = x. = X/Xo;
normalized velocity = (velocity)/(initial velocity) = xn = x/x0;
normalized time = time/(initial time-to-contact with destination
under constant velocity) = tn = - t/Zo;
normalized deceleration = deceleration/(twice constant deceleration needed to stop at destination) = ~t, = ~t(Xo/~2).
The normalized equations of motion are:
x, - (1 - ktn)o/k)
xn = (1 - ktn) (l/k) - t
~. = (1 - k)(l - k t , ) a / ~ - 2
(A7)
(A8)
(A9)
where normalized time to reach destination = 1/k.
Following the "stop-at" procedure of keeping ~(x) constant at
a value k, 0 < k <=0.5 requires steadily slackening off the brakes as
the destination is approached (except for k = 0.5 when deceleration
is constant). This is because the exponent ( ( l / k ) - 2 ) in Eq. (A9) is
positive. How deceleration falls off is shown in Fig. 5B by the graph
lines (derived from Eq. (A9) for ~(x) = 0.1-0.4. In Fig. 5C, the
graph lines for "~(x) = 0.1-0.4 (derived from Eqs. (A7 and A8) show
how velocity of approach decreases to zero as the destination is
approached.
Eqs. (A7-A9) also describe the motion of the animal which
would result from keeping "~(x) constant at a value k, 0.5 < k < 1. In
this case, the exponent in Eq. (A9) is negative. This means that
braking has to get progressively harder as the destination is approached. Moreover, stopping at the destination in this way theoretically requires reaching infinite braking force. A realistic
procedure - which we will call the controlled-collision procedure
is to keep t(x) constant at a value between 0.5 and 1.0 until maxim u m braking power is reached, and then maintain this braking
force. This would result in the animal colliding with the destination
but in a controlled way. In Fig. 5B, the curves for ~(x) = 0.6-0.9
(derived from Eq. (A9)) show how deceleration builds up when
following the controlled-collision procedure; the thicker lines at the
top of the curves correspond to maintaining, up to collision, a
constant maximum normalized deceleration of unity. How velocity
of approach decreases as a result of these deceleration patterns is
shown by the corresponding curves in Fig. 5C.
The above results are summarized in Fig. 1.
In general, if dpis the angle between the direction of locomotion
and the direction of an echo from an element of the approach
surface, then sensory variable tan qb= b x - 1 for constant b. Hence,
from Eq. (A10),
z(x) = - z(tan qb)
Information about z(x) is available in similar form optically (Lee
1980).
(2) Tau function of echo delay. Echo delay d is the time interval
between the sound pulse being emitted and the echo returning
from a surface element. Thus, referring to Fig. 2, sensory variable
d = (2/c)r, where r is the distance away of the element and c is the
velocity of sound. Hence, from Eq. (AI0),
z(r) = z(d)
Bats might detect z(x) and "~(x) to control braking by registering the
value of the tau function of certain acoustic variables. For if S is
a sensory variable that is a power function of distance (x) - i.e.,
S = kx a, where k,ct are constants - then
z(x) = a~(S)
(A10)
The p r o o f is straightforward: if S = kx a then, differentiating with
respect to time, S = kctx a-1. Hence, z ( S ) = S/S = (1/ct)x/~ =
(l/u)z(x); i.e., z(x) = ux(S).
It is possible, therefore, that bats might detect T(x) by registering
the tau function of an acoustic variable that is a power function of
x. Possible variables, illustrated in Fig. 2, are:
(1) Tau function of angle subtended at head by directions of echoes.
First consider the small angle 0 subtended at the head by any two
elements on the approach surface close to the direction of locomotion and distance x from the head. Then the sensory variable
0 = ax -1 for constant a. Hence, from Eq. (AI0),
z(x) = - z(0)
(A11)
(A13)
If the element lies close to the direction of locomotion, then to
first order approximation, r = x. Hence
z(x) = z(d)
(A14)
In general, if ~ is the angle between the direction of locomotion
and the direction of the echo from an element of the approach
surface then, referring to Fig. 2, x z = r z - b z. Differentiating with
respect to time, x i = r f . Therefore, dividing the equations,
x(x)=x/5~=x2/rf=z(r) cos 2 qb. Hence from Eq. (A14)
z(x) = z(d) cos 2 ~p
(AI 5)
Since z(d) and cos 2 qb are defined within a pulse-echo pair,
information for controlling approach can in principle be derived
from a single sound pulse and its echo.
(3) Taufunction of intensity of echo. If I is the intensity of the echo
of a sound pulse of constant intensity reflected off a surface element,
then I will follow the inverse square law, that is I = k r - z , where r
is the distance of the surface element reflecting the sound and k is
a constant. Hence from Eq. (A10)
x(r) = - 2z(I)
(A16)
Thus, if the element lies close to the direction of locomotion,
then to first order approximation, r = x, and so
x(x) = - 2z(I)
(A17)
In general, if ~bis the angle between the direction of locomotion
and the direction of the echo from an element of the approach
surface then, as shown above, z(x)= z(r) cos 2 ~, and so from Eq.
(A17)
"c(x) = - 2x(I) cos 2 qb
Appendix 2: Echolocation information for controlling
approach
(A12)
(AI8)
Note that z(I) and cos 2 r and hence z(x), are in principle
specified by single echoes.
Appendix 3" Formula for dilating the aperture
Figure 6 shows a section through the sensory array. The bat is
assumed to be heading for the centre O of the aperture in a direction
perpendicular to it. C is the point of convergence of "rays", i.e.,
direction lines to environmental surface elements. The set of rays
comprise the sensory array, optic or acoustic. To describe how the
array changes as the bat approaches the dilating aperture, we
consider the rays intercepting a projection plane perpendicular to
the direction of locomotion and describe the flow pattern on the
plane. Triangles P'O'C and POC are similar, therefore
r = W/X
(AI9)
Differentiating with respect to time
/- = (XVq - W)()/X 2
(A20)
Dividing the equations
f/r = @ / W - 2~/X
(A21)
D.N. Lee et al.: Echolocation and vision: common principles
....,...,~.--"""""~"""""'"~~
i: oo
1
x ............................................
Aperture
Fig. 6. Illustrating derivation of the formula for dilating the aperture given in Appendix 3
i.e.,
1/z(r) = 1/~(W) - 1/z(X)
(A22)
where z(r) = r/t etc.
Under normal circumstances, with a non-dilating aperture ( i.e.,
W = 0), x(r) = - ~ ( X ) = time to contact with aperture at constant
velocity. Therefore to make the time to contact appear smaller by
an amount T requires making x(r) = - ~ ( X ) - T . From Eq. (A22),
this can be done by appropriately regulating z(W) at each instant
so that
l/~(r) = - 1/(~(x) + T) = 1 / ~ ( W ) - U~(X)
i.e.,
x(W) = (z(X) + T)z(X)/T
(A23)
As the bat flew down the tunnel through the IR gates, a transputer
computed this formula on line between successive gate crossings
and used the result to dilate the aperture by the appropriate
amount.
References
Bastian J (1986) Electrolocation: behavior, anatomy and physiology. In: Bullock TH, Heiligenberg W (eds) Electroreception.
Wiley, New York, pp 577-612
Bootsma RJ, van Wieringen PWC (1990) Timing an attacking for
hand drive in table tennis. J Exp Psychol: Human Perception
and Performance 16:21-29
Bullock TH, Heiligenberg W (eds) (1986) Electroreception. Wiley,
New York
Griffin D R (1958) Listening in the dark. YaIe University Press,
New Haven
Griffin DR, Novick A, Kornfield M (1958) The sensitivity of
echolocation in the fruit bat Rousettus. Biol Bull 115:107-113
Grinnell AD, Griffin D R (1958) The sensitivity of echolocation in
bats. Biol Bull 114:10-22
Gustafson Y, Schnitzler H U (1979) Echolocation and obstacle
avoidance in the hipposiderid bat Asellia tridens. J Comp
Physiol 131 : 161-167
Kick SA, Simmons JA (1984) Automatic gain control in the bat's
sonar receiver and the neuroethology of echolocation. J Neurosci 4:2725-2737
Lacquaniti F, Maiolo C (1989) The role of preparation in tuning
anticipatory and reflex responses during catching. J Neurosci
9:134-148
571
Lee D N (1976) A theory of visual control of braking based on
information about time-to-collision. Perception 5:437-459
Lee D N (1980) The optic flow field: The foundation of vision. Phil
Trans R Soc London B 290:169-179
Lee D N (1991) Optic and acoustic constraints for action. In: Neisser
U (ed) Ecological and interpersonal knowledge of the self. University Press, Cambridge, in press
Lee DN, Reddish PE (1981) Plummeting gannets: a paradigm of
ecological optics. Nature 293 : 293-294
Lee DN, Young DS (1986) Gearing action to the environment. In:
Heuer H, Fromm C (eds) Generation and modulation of action
patterns. Springer, Heidelberg, pp 217-230
Lee DN, Lishman JR, Thomson JA (1982) Visual regulation of gait
in long jumping. J Exp Psychol: Human Perception and Performance 8 : 448-459
Lee DN, Young DS, Reddish PE, Lough S, Clayton T M H (I983)
Visual timing in hitting an accelerating ball. Q J Exp Psychol
35A: 333-346
Lee DN, Reddish PE, Rand DT (1991) Aerial docking by hummingbirds. Naturwissenschaften 78 : 526-527
Moore BCJ (1989) An introduction to the psychology of hearing.
Academic Press, London
Neuweiler G, Mrhres FP (1967) Die Rolle des Ortsged/ichtnisses
bei der Orientierung der Grossblatt-Fledermaus Meyaderma
lyre. Z Vergl Physiol 57:147-171
Rosenblum LD, Carello C, Pastore RE (1987) Relative effectiveness
of three stimulus variables for locating a moving sound source.
Perception 16:175-186
Savelsbergh GJP, Whiting HTA, Bootsma RJ (1991) Grasping
"tau". J Exp Psychol: Human Perception and Performance
17:315-322
Schiff W, Detwiler ML (1979) Information used in judging impending collision. Perception 8:647 658
Schiff W, Oldak R (1990) Accuracy of judging time-to-arrival:
Effects of modality, trajectory and gender. J Exp Psychol:
Human Perception and Performance 16:303-316
Schnitzler H U (1973) Control of Doppler shift compensation in the
greater horseshoe bat Rhinolophus ferrumequinum. J Comp
Physiol 82: 79-92
Schnitzler HU, Henson OW (1980) Performance of airborne animal
sonar systems: I Microchiroptera. In: Busnel RG, Fish JF (eds)
Animal sonar systems. Plenum, New York, pp 109-181
Sidaway B, McNitt-Gray J, Davis G (1989) Visual timing of muscle
preactivation in preparation for landing. Ecol Psychol
1 : 253-264
Simmons JA (1989) A view of the world through the bat's ear: the
formation of acoustic images in echolocation. Cognition
33:155-199
Simmons JA, Ferragamo M, Moss CF, Stevenson SB, Altes R A
(1990) Discrimination of jittered sonar echoes by the echolocating bat, Eptesicus fuscus: the shape of the target images in
echolocation. J Comp Physiol A 167:589-616
Suga N (1984) Neural mechanisms of complex-sound processing for
echolocation. Trends Neurosci 7:20-27
Suga N (1988) Parallel-hierarchical processing of biosonar information in the mustached bat. In: Nachtigall PE, Moore PWB (eds)
Animal sonar: processes and performance. Plenum Press, New
York, pp 149-159
Todd JT (1981) Visual information about moving objects. J Exp
Psychol: Human Perception and Performance 7:795-810
Tresilian JR (1990) Perceptual information for the timing of interceptive action. Perception 19:223-239
Wagner H (1982) Flow-field variables trigger landing in flies. Nature 297:142148
Warren WH, Young DS, Lee DN (1986) Visual control of step
length during running over irregular terrain. J Exp Psychol:
Human Perception and Performance 12:259-266
Webster FA (1967) Some acoustical differences between bats and
men. In: Dufton R (ed) International conference on sensory
devices for the blind. St Dunstan's, London, pp 63-88