Introductory Classical Mechanics

Introductory Classical Mechanics
"Mathematics may be defined as the subject in which we never know what we are talking about, nor whether what we are saying is true”
Bertrand Russell
Newton's Laws
Our purpose in this chapter is to lay a major part of the foundation for quantum mechanics, and more specifically, Hamiltonian mechanics from which the famous Hamiltonian of quantum mechanics is derived. All too often the Hamiltonian is simply introduced as a fait accompli in courses on quantum mechanics without any explanation as to where it comes from. Admittedly a full discussion of its derivation is somewhat time consuming and beyond the scope of this document but it is still important to know where it comes from and why it is used. Classical analytical mechanics has been developed over a period of about three centuries and there is, to put it mildly, much written about the subject. However, we will not be especially verbose here so the interested reader might consider looking at one or more of the references on the subject.
Mechanics (both classical and quantum) is, of course, the study of the motion of objects in space. One could say that much if not all of physics boils down to mechanics. We begin with the original, formalized mechanics of Isaac Newton.
The three famous laws of motion were postulated by Newton in his
Principia Mathematica. They are (in his words followed by ours):
1. Newton's 1st law:
●
Newton: Every body persists in its state of being at rest or of moving uniformly straight forward, except insofar as it is compelled to change its state by force impressed.
● Modern: in the absence of an external force a body will stay at rest or will move with constant velocity in a straight line
2. Newton's 2nd law:
● Newton: The change of motion of a body is proportional to the impulse impressed on the body, and happens along the straight line on which that impulse is impressed.
● Modern: the external force on a body is equal to the mass of the body times its acceleration
3. Newton's 3rd law:
● Newton: To every action there is always an equal and opposite reaction: or the forces of two bodies on each other are always equal and are directed in opposite directions.
● Modern: when body A exerts a force F on body B, body B exerts a force -F on body A.
These principles have been at the foundations of classical physics for three hundred years and have proven extremely useful in mechanics calculations for macroscopic objects.
When Newton talked about 'motion' he really meant is what we now call momentum and which is defined as: p = mv
[9-1]
With this we can write Newton's second law:
F = dp dt
= m dv dt
= ma
[9-2]
In order to further dissect these equations we introduce some simplifying notation: a = v = dv dt dx dt
=
= ˙ d 2 dt 2 x x
Thus, we may rewrite Newton's second law:
F = m dv dt
= m d 2 dt 2 x
= m x ¨
It is interesting to realize that in order to deal with these new
ideas of motion Newton had to invent the calculus 1 (or fluxions and
fluents as Newton called differential and integral calculus).
Actually, it was simultaneously developed by Gottfried Leibniz in
Hanover, Germany. However, Newton and his supporters villified
Leibniz saying that he had simply created another notation for the calculus rather than the principles of calculus and Leibniz was not
1 After reading “The Calculus Wars” listed in the references section I am inclined to credit Liebniz with the discovery of calculus. There is no doubt that he was the first to publish anything on the subject and that Newton dragged his heels for a very long time with respect to informing the world about his work. Liebniz's calculus was already firmly established on the continent by the time Newton got around to publishing and we still use
Liebniz's symbols today.
given due credit for his contributions for many years after his death in 1716. The modern symbols used in calculus including 'd' for the latin 'diffentia' and the elongated 'S' of the integral sign after the latin 'summa' honour Leibniz' contributions to the calculus.
We have not included anything about directions in the above equations. If we use the idea of the position vector:
⃗ = x ( x
1, x
2, x
3
)= x
1 u x
+ x
2 u ⃗ y
+ x
3 u z where x
1
, x
2
and x
3
are the components of the position vector along the cartesian axes (see chapter 3), we can write Newton's second law in vector form:
⃗
= m d ⃗ dt
= m d 2 dt 2
= m ⃗¨ = m a
Using Newton's laws we may calculate the future position and velocity of an object knowing only the initial position and velocity.
Let's look an example of a body moving under constant acceleration along the x-axis. We will assume an initial position at time zero of x
0
and initial velocity of v
0
.
a = dv dt
∫ dv =
∫ a dt v = at + C
1
C
1 is, of course, the constant of integration. At time zero we can say: v
0
= a × 0 + C
1 v
0
= C
1 and our velocity equation now becomes: v = at + v
0
Similarly we can find the position equation:
[9-3]
v = dx dt
∫ dx = ∫ v dt x = ∫ ( at + v
0
) dt
=
∫ at dt + ∫ v
0 dt
= at 2
+ v
0 t + C
2
Again, we find the value of
C
2 from the initial postion: x
0 x = at 2
+ v
= a × 0 + v
0 t + C
2
0
× 0 + C x
0
= C
2
2 and the position equation is: x = at 2
+ v
0 t + x
0
[9-4]
Thus, in the case of the object moving under constant acceleration we see that we can predict its position and velocity at any time in the future. We say that knowledge of the position and velocity of the object is knowledge of the state of the object.
(⃗ ( t ) , v ( t ))
Knowing the state of an object it should be possible to predict it's future position and velocity (or state) at any point in time using
[9-3] and [9-4]. This is part of the philosophy of determinism of
Descartes. Determinism essentially states that, since the beginning of time, given the initial state the future states of the universe have, at least in principle, been predictable or determinable.
Over time it was found to be more convenient to use the momentum of the object rather than the velocity to specify the state of the object. The momentum of an object is conservative if there are no external forces acting on it. How do we know this? It is postulated in Newton's third law. What it is really saying, if somewhat obtusely, is that momentum is conserved in a physical system. Thus, when a rocket engine is activated and material moves very rapidly from the engine the rocket begins to move. However the total momentum of the rocket and the expended fuel remains constant (in the absence of external forces). Using the momentum in place of velocity makes certain calculations easier. Thus the state can be represented as a point in R 6 (called phase space) since there are three components to the position and momentum vectors.
(⃗ ( v ) , v ( t ))
We can show this with an illustrative example. Let's suppose that we have two billiard balls labelled A and B. Ball A is motionless (v
A
= 0) and ball B is travelling with velocity v
B
= 1.5 m/s towards ball A. For simpliciy we will consider them to be capable of moving in only the x direction. We also assume them to have the same mass. What will happen when ball B strikes ball A? Newton's third law postulates that the total momentum of the two balls will remain constant. Thus: v mv
Ai
A
+ v
+
Bi m v
= v
B
Af
= k m ( v v
A
A
+
+ v v
B
B
)= k
= k m
+ v
Bf
This will be so both before and after the collision. Thus before the collision, v
A
is zero and v
B
is non-zero. After the collision v
A
and v
B
will change but their sum will not. This is, of course an artificial example with the two masses being the same. More generally, using balls of different masses: m
A v m
A
Ai
+ m
B v
A
+ m v
Bi
=
B m v
A
B
= v
Af k
+ m
B v
Bf
In this case the sum of the momenta remains constant or is conserved.
We can use this to solve problems involving the motion of objects.
Energy
What is it about moving objects that is different from motionless ones? Obviously, they are moving but beyond that, in order to change them from a motionless state to one in motion we have to give them a push. We have apparently added something to them.
In the late 17th century, Gottfried Leibniz found that for moving objects in many cases, the quantity mv 2 was conserved. He called this the vis viva or living force of the system. Newton's third law postulated that the quantity mv is conserved and, since his influence among scientists of the time was extensive, many regarded the conservation of momentum as a fundamental principle rather than
Leibniz's vis viva. However, later in the 19th century, long after his death, Leibniz's work was taken more seriously and the term vis
viva was changed to energy (by Thomas Young) and the calculation of
energy content was revised. Let's see how, using Newton's second law.
We start by rearranging and restating:
F = ma = m dv dt
= m dx dt
Fdx = mv dv
Fdx = d (
1
2 mv dv dx
2
)
= mv dv dx
[9-5]
F dx is the work done on an object as a result of the application of force,
F
, and movement of the object through dx
. We are assuming a constant force for the moment. The other side of the equation is the change in the kinetic energy (or Leibniz's vis viva) of the object as a result of the application of the force.
T =
1
2 mv dW = Fdx
2 dW = dT
Thus the work done on an object is equal to the change in its kinetic energy.
Now, let's assume, instead of a constant force, a positiondependent force and do some integration: x x
∫
0
F ( x ) dx = ∫ v v
0 mv dv x x
∫
0
F ( x ) dx =
1
2
E =
1
2 mv 2
0
=
1
2 mv 2
−
1
2 x mv 2
− ∫ x
0 mv
0
2
F ( x ) dx
We define the integral term involving F(x) as the potential energy:
U ( x )≡− ∫ x x
0
F ( x ) dx
[9-6] and recalling the definition of kinetic energy from above:
E = T ( v )+ U ( x ) [9-7]
The kinetic energy is a function of the velocity of the system and the potential energy a function of position (for moving objects). For a closed system the total energy comprised of kinetic and potential
energies is conserved. Kinetic energy may be converted to potential energy and vice versa but the total will remain constant. As we have seen with momentum, conserved quantities are useful in simplifying calculations.
A classic example of an energy conservative system is the simple harmonic oscillator in which an object attached to a spring experiences a force -kx where x is the displacement from equilibrium and k is the spring constant. Thus:
F =− kx = ma = mv dv dt or dv mv + kx = 0 dt
∫ mv dv + ∫ kx dx = K
1
2 mv 2
+
1
2 kx 2
= K
We see the sum of the kinetic and potential energies derived here from Newton's second law and the force function, -kx. The sum is equal to a constant and, since its time derivative is zero, is therefore conserved.
We say that the equation: ma = m x ¨ =− kx is the equation of motion since we can use it to predict the future position and velocity of the object on the spring.
Generalized Coordinates
Assigning a position to an object involves assigning spacial coordinates to it. Most of us are very used to using cartesian coordinates, x, y and z in two and three dimensional situations. We have already assigned a 3D position using a vector notation:
⃗ = r ( x
1, x
2, x
3
) where, again, x
1
, x
2
and x
3
are the components of the position vector along the cartesian axes. We use this notation rather than x, y and z in order to simplify our later developments. It is also possible that this vector can depend on time as well:
⃗ = r ( x
1, x
2, x
3, t )
This being the case we can develop the velocity vector as follows: d ⃗ dt
=⃗˙ =
∂ x
1
∂ x
2
∂ x
1
∂ t
+
∂ x
2
∂ t
+
=
=
3
∑ i = 1
3
∑ i = 1
∂ x i
∂ x i
∂ x i
∂ t x ˙ i
+
+
∂ t
∂ t
∂ x
3
∂ x
3
+
∂ t ∂ t
Of course, this can be expanded to include as many dimensions as we like: d ⃗ dt
=⃗˙ = n
∑ i = 1
= n
∑ i = 1
∂ x i
∂ x i x ˙ i
+
∂ x i dt
∂ t
+
∂ t
We need not use cartesian coordinates to specify the position and velocity of an object. We can just as well use, for example, spherical coordinates (see Appendix II), radial r, azimuth
θ and elevation ϕ . Since the choice of coordinate system to specify position is arbitrary we can generalize our expression using q for our position coordinate:
⃗ = r ( q
1, q
2
..
t ) and
⃗˙ = n
∑ i = 1
∂ q i q ˙ i
+
∂ t where the q i and the q ˙ i are referred to (oddly enough) as generalized coordinates. as generalized velocities. Generalized coordinates are discussed in much more detail in the references and the interested reader is encouraged to investigate.
The Lagrangian
We will not go into great detail here as the Lagrangian formulation of mechanics is, for our purposes, only a stepping stone to the Hamiltonian mechanics (which will then be a stepping stone to quantum mechanics).
The Lagrange method is an alternative approach to understanding
the motion of objects. At first one wonders "It seems like a lot of work for little return .. why bother?". The answer to this is twofold:
I. the form of the Lagrange equations remains exactly the same no matter what coordinate system is used. Very convenient when applied to different coordinate systems.
II. using the Lagrange equations one constructs a scalar (L) and deduces the equations of motion by differentiation. No vectors are involved as in Newtonian mechanics, which simplifies things.
The Lagrangian is defined as:
L ≡ T − U
[9-8] where, as above, T is kinetic energy and U is potential energy. It seems at first an odd thing to consider the difference between T and
U since we are used to thinking in terms of the total energy of a system, the sum of T and U.
We write the Euler-Lagrange equation: d dt
( ∂ L )
=
∂ L
∂ q
[9-9]
Note that we can express this equation in generalized coordinates. In other words it works for any coordinate system! The interested reader might refer to Johns or Morin or Rossberg in the reference list or any reference on analytical mechanics for more information about the derivation of this equation.
Let's take our simple harmonic oscillator problem and subject it to Lagrangian treatment. First we write the Lagrangian:
L = T ( ˙ x )− U ( x )
=
1
2 m x ˙
2
+
1
2 kx 2 and then subject it to the Euler-Lagrange equation: d dt
( ∂ L
∂ ˙ x
)
= d dt
( m ˙ x )= m x ¨ = ma
∂ L
∂ x
= k x = m ¨ x = kx
F
which is just Newton's second law, F = ma. This isn't very instructive or useful yet. We might as well just use Newton's laws.
Let's look at another problem.
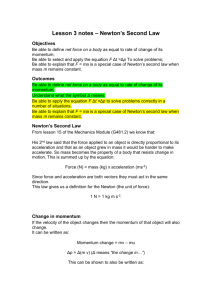
Imagine a pendulum with a bob of mass m on a massless string of length l swinging through an arc of q
radians:
O x y q l x h mg
Figure 9-1: Simple Pendulum
If we approach this using cartesian coordinates we can come up with an equation of motion for the pendulum (also in cartesian coordinates). Note that the origin here is at the point labelled 'O'
(although it doesn't matter where the origin is placed). We also note that in this example the x and y coordinates of the pendulum bob are not independent. We therefore choose to express our equations in one of these coordinates, x in our case: dy y =−
√ l 2
− x 2
= ˙ y = x x ˙ dt √ l 2
− x 2 l = y + h → h = l − y = l −
√ l 2
− x 2
Since we are going to build a Lagrangian we need expressions for the kinetic and potential energies:
T =
1
2 m ( ˙
2
+ ˙ y 2
)
=
=
=
1
2
1
2
=
1
2 m m
( ˙
˙ x
2
2
+
( l 2 x 2
˙ x 2
− x 2 m x ˙
2 x 2 m ˙ x 2
(
( 1 l 2
+
− l 2
− x 2 x 2
+ x 2 l 2
− x 2
1
2 l 2 l 2
− x 2
)
)
)
)
U =− mgh =− mg ( l −
√ l 2
− x 2
)
We now construct the Lagrangian:
L = T − U =
1
2 m ˙ x 2 l 2 l 2
− x 2
+ mg ( l −
√ l 2
− x 2
) and apply the Euler-Lagrange equation: m x ¨ dL dx d dt
( dL d ˙ x
)
= dL dx d dt
= m ˙ x 2
( dL d ˙ x x dL d ˙ x
= m ˙ x
)
= m ¨ x l 2
− x 2 l 2 l 2
− x 2 l 2 l 2
+ mg
( l 2
− x 2
)
2 √ l 2 so x
− x 2 l 2 l 2
− x 2
= m x ˙
2 x l 2
( l 2
− x 2
)
2
+ mg x
√ l 2
− x 2
We rearrange and come up with the equation of motion: m x ¨ = m x ˙
2 x l 2
( l 2
− x 2
)
2
⋅ l 2
= m ˙ x 2 x l 2
− x 2 l 2
2
− x
+ mg
+ mgx
√ l 2
√ l 2
− x 2 x
− x l 2
2
⋅ l 2
− x 2 l 2
[9-10]
Now, let's do the same analysis again but this time in polar coordinates. From figure [9-1]:
x = l sin (θ) y =− l cos (θ) and the time derivatives (using the chain rule) of these are:
˙ x = l ˙θ cos (θ)
˙ y = l ˙θ sin (θ)
Again, we will construct a Lagrangian using kinetic and potential energies. The kinetic energy expressed in polar coordinates is:
=
1
2 ml 2
=
1
2
˙θ
T =
1
2
2 m ˙ x 2
+
1
2 cos 2
(θ)+
1
2 m m l 2
˙ y
˙θ
2
2 sin 2
(θ) ml 2 ˙θ 2
( cos 2
(θ)+ sin 2
(θ))
=
1
2 ml 2 ˙θ 2 and the potential energy is:
U =− mg ( l − y )
= − mg ( l + l cos (θ))
= − mgl ( 1 + cos (θ))
The Lagrangian is:
L = T − U =
1
2 ml 2
θ
˙ 2
+ mgl ( 1 + cos (θ))
Now, we write the Euler-Lagrange equation, in polar coordinates:
d dt
( ∂ L
∂ L
∂ ˙θ
∂ ˙θ
=
)
= ml 2 dL d θ
˙θ dt dL d d
θ
( ∂ L
∂ ˙θ
)
= ml 2 ¨θ
=− mgl sin (θ) and ml 2 ¨θ=− mgl sin (θ)
¨θ=− l g sin (θ)
[9-11]
This is a much simpler result than that of equation [9-10]. In this case the use of polar coordinates is advantageous.
Note that we have used the Lagrangian with two different coordinate systems, cartesian and polar, to produce equations of motion in those coordinate systems. This is a large part of the beauty of the Lagrangian form of mechanics .. it is coordinateindependent.
Note also that the differential equation [9-11] is not one that admits solutions similar to those of the harmonic oscillator above.
However if one assumes a pendulum with small oscillations then: sin (θ)≈θ and equation [9-11] becomes:
¨θ=
− g l
θ which is of the form of an harmonic oscillator differential equation with similar solutions.
The Hamiltonian
The third approach to mechanics is that of Hamilton. Again, we do not wish to be rigorous or complete here, but rather to show the reader the very basics.
The Lagrangian,
L
, is a function of generalized coordinates
and velocities whereas the Hamiltonian is a function of generalized coordinates and momenta. As with the Lagrangian, the Hamiltonian is expressed in terms of energy scalars:
H = T + U where the kinetic energy,
T
, is now in terms of momentum:
[9-12]
T =
1
2 p i
= m q ˙ i m q ˙ i
2
=
1
2 m q i
= p i
2 m 2
= p m i
1
2 p i
2 m
The potential energy,
U
, is of the same form as in the Lagrangian.
Note that
H is simply the sum of the kinetic and potential energies .. in other words the total energy of the system. If there are no external forces then the total energy of the system is constant or conserved. As above, the interested reader might consult the references; in particular, both Rossberg and Goldstein give a readable treatment of the development of the Hamiltonian from the
Lagrangian. We can now expand our Hamiltonian expression a bit: p 2
H ( q , p )=
2m
+ U ( q ) [9-13] using generalized coordinates and momenta. We find after suitable
(and lengthy) analysis that: p i
=
∂ H
∂ q i and q ˙ i
=
∂ H
∂ p i
[9-14]
These are referred to as Hamiltonian's equations. Note the pleasing symmetry (except for the minus sign) in p and q
.
Problems
References
1. 1. O.D. Johns, Analytical Mechanics for Relativity and Quantum
Mechanics, Oxford University Press, 2005.
2. R. Piziak, J.J. Mitchell, Hamiltonian Formalism and the State of a Physical System, Computers and Mathematics with Applications,
42, 793-805 (2001).
3. D. Morin, Introduction to Classical Mechanics With Problems and
Solutions, Cambridge University Press, 2007.
4. K. Rossberg, A First Course in Analytic Mechanics, Wiley and
Sons, (1983).
5. H. Goldstein, C. Poole, J. Safko, Classical Mechanics, Addison
Wesley, (2002).