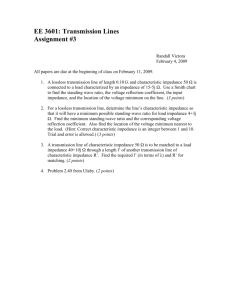
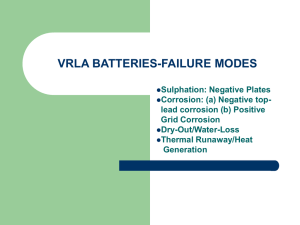
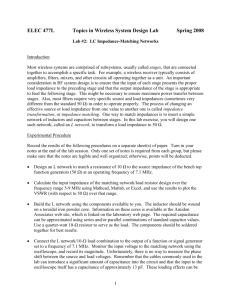
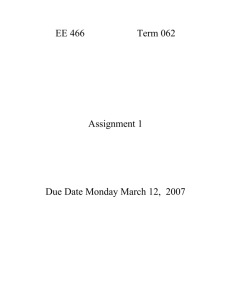
University of Surrey, Department of Physics 2nd Year Electromagnetism Laboratory Electrical and Mechanical Impedance — 2 weeks 1. Introduction The concept of impedance is a very important one in physics. Most people are first introduced to the term in an electrical context, by analysing Ohm’s Law and extending it to the case of LCR circuits containing inductive, capacitative and resistive elements. However, we may also define an analogous term, mechanical impedance, which describes the relationship between force and velocity in a mechanically oscillating system. Impedance is, in fact, a very general concept, with applications to all sorts of oscillatory and wave motions, including ultrasound imaging, optical lens design and the propagation of waves in strings. This practical will illustrate some of these ideas using a simple loudspeaker. The loudspeaker has electrical impedance, because the coil through which current flows is an LR circuit. It also has mechanical impedance by virtue of the mass of the speaker cone and the stiffness of its suspension. The two types of impedance interact in a way which will be investigated below. 2. Aims of the Practical This practical will introduce you to the concepts of complex mechanical and electrical impedance. You will learn the following practical skills: measurement of resonance frequency; relationship between complex impedance and phase of oscillation; manipulation of complex impedances; analysis of data and interpretation in terms of a physical model; estimation of errors. 3. Theory 3.1 The concept of impedance In most oscillatory physical systems, we meet the concept of a “forcing term”, which produces some form of “response”. In a mechanical system such as a vibrating string, the force might be provided by a motor moving one end of the string up and down, whilst the response is the y-velocity of the string. For an ultrasound wave, the forcing term is a changing pressure and the response is the 1 oscillating velocity of the particles in the medium through which the wave passes. In an LCR electrical circuit, the forcing term is the alternating potential difference across the circuit and the response is the current which passes through that circuit. Impedance is the quantity which tells us how to predict the response when we know what the forcing term is. Impedance = Forcing Term . Response [1] [2] For example, in an AC electrical circuit, Z V I V IZ . You should recognise the second equation as the generalisation of Ohm’s Law. 3.2 Complex Impedance — Resistance and Reactance You should remember from studying LCR electrical circuits that we can distinguish three classes of impedance. Purely resistive terms correspond to a real impedance (Z=R, Rr) and an energy loss which is independent of frequency. Here the response is in phase with the forcing term. Pure inductive terms correspond to a reactance which is pure imaginary (Z=iL, Lr). Reactive components store energy. Over each cycle of the oscillation, the forcing term “puts in” energy to the component and then, half a cycle later, “gets it back”. No net energy loss occurs. Notice how the imaginary impedance is frequency dependent. Here the response (current) has a phase lag of 90 compared with the driving voltage. Pure capacitative terms are also imaginary (Z=1/iC, Cr). This time, however, the frequency response is different and the response has a phase lead of 90. Again, no energy is dissipated by such impedances. The reason that the concept of impedance is so wide-reaching is that all the systems involved can be described by the same second order differential equation of damped simple harmonic motion. All systems where the concept of impedance applies show a number of similar properties: The total impedance is the sum of the impedances of the separate components. But be careful, you cannot mix different types of impedance. So, for example, in this practical, the total electrical impedance of the loudspeaker is the sum of all the electrical impedance terms and the total mechanical 2 impedance is the sum of all the mechanical terms. (If you get confused, just ask yourself what the units of each term are.) In general, the impedance Z will be complex, i.e., will have both resistive (energy dissipating) and reactive (energy conserving) parts. The magnitude and phase of the response will often be frequency dependent. These can be found by writing the driving force F and the response A as complex variables. F F0 eit , A A0 e it and A F / Z , [3] where F0, A0 and Z are all complex. Remember, what we can actually measure on our system (i.e., the current, velocity, etc.) is the real part of A. The phase of the response is tan 1 Im( A) Im( F / Z ) . tan 1 Re( A) Re( F / Z ) [4] Appendix A describes the way in which all these concepts are applied to the particular case of the loudspeaker system. You should study this carefully when you come to the relevant parts of the experiment. 4. Experimental Procedure 4.1 Experiment 1 — Resonant frequency of the loudspeaker The aim of this experiment is to become familiar with the mechanical characteristics of the loudspeaker, which enter into the impedance calculations. 1. Measure the value of the resistance of the loudspeaker coil using a DVM. In order not to burn out the coil by passing too much current, we must keep I2R less than 100 mW. Work out what the maximum current which may be passed safely is. Check the amplitude control on the oscillator and the output of the amplifier. Do not let the current exceed this value during the experiment. 2. Set up the circuit in Fig. 1. 3. Adjust the frequency of the oscillator between about 10 and 150 Hz and note the current on the ammeter. You should see a very marked minimum as the loudspeaker passes through its mechanical resonance. This is because, at resonance, Zcone is a Audio minimum. It follows that, since Eq. [8] in Appendix A power amplifier (inverting) contains the inverse of Zcone , Zelec will be a maximum and hence the current will 1 ~ be a minimum. 4. (Zero-phase Using theoutput) frequency meter, measure I at a range of about Frequency30 different frequencies. Plot a graph of I against f and record the resonanceMeter frequency f0. Oscillator Loudspeaker A ~ AC ammeter 3 Figure 1: Circuit for Experiment 1 5. Now load the loudspeaker symmetrically with plasticine and re-measure the resonance frequency. Make careful measurements of f0 for values of madded between 0 and 7 g. (You do not need to plot a separate graph as in 2 for each mass so you can save time by only recording f actually at resonance. This is easy to determine just by varying f until the current is a minimum.) 6. From Eq. [10], 1 2 0 1 madded c s with c m / s [5] Use your data for f0 and madded to find s and m. 4.2 Experiment 2 — Measurement of Zcoil and Zelec The purpose of this experiment is to make two different sets of measurements of the loudspeaker’s electrical impedance and to understand how the electrical impedance is related to the mechanical impedance and the various quantities measured in 4.1. Note that you need to get to the end of step 7 by the end of the second lab session. You don’t need to have read all the theory by then, but you must check with the demonstrator that you have all the necessary results for a potential lab report. 1. Remove all added masses from the loudspeaker cone. 2. Modify your circuit to the configuration shown in Fig. 2. You should obtain two Lissajous figures, which can be altered by changing the variable phase control of the oscillator. See a demonstrator now to check that you have the circuit correct, before carrying on. If you can’t get the circuit to work, do not waste more than half an hour trying to set it up. Call someone to help. 3. The loudspeaker’s impedance is a complex number. There is magnitude information, |Z|., because we can relate the size flowing current to the magnitude of the voltage generated by the amplifier, but there is also phase information, because the current may be out of phase with the applied voltage. Start off with a frequency of about 30 Hz and find the electrical impedance of the loudspeaker as follows: 4 x x Current ’scope Voltage ’scope y y Differential amplifier Zero-phase output * 1 Variable phase output Figure 4: * * Low resistance,r * and , use the leads with a BNC plug on one end and red and black leads on the other end. At the points marked *, connect Circuit for Experiment 2. For points marked the red plug and leave the black end dangling. At the point marked , connect both red and black plugs on the BNC cable. Measure the height of the trace (i.e., the highest vertical point of the straight line or ellipse — hint: this is easier to do if you temporarily disconnect the input to the x-plates) in V or mV on the current ’scope. Using this, you will later be able to calculate |Z|. Adjust the variable phase control on the oscillator so that the voltage ’scope gives a diagonal line from top left to bottom right†. At this point, the phase output by the so-called “zero-phase” and the “variable-phase” terminals are the same. Record the value on the phase dial as the reference phase ref. This is just a calibration of the zero-phase terminal; ref should be roughly zero. Now change the phase control until the current ’scope gives a similar diagonal line. What does this diagonal line signify? It means that the phase from the variable phase output (x on the ’scope) is equal to the phase of the current (y on the ’scope). You now have a direct measure of the phase of the impedance Z by using ref † The fact that we choose the diagonal line from top left to bottom right takes account of the fact that our amplifier is inverting. 5 x y Voltage ’scope V 0 e i ( t ) GV0 e it Current ’scope V 0 e i ( t ) k i t e Z Table 1: Readings on the “current” and “voltage” oscilloscopes. This is a summary of the theory of Appendix B and should help you understand your measurements of impedance. These two bits of information (i.e., the height of the trace and the difference in angle) give you the full information about the impedance at the given frequency. You should read Appendix B to understand the significance of what you are doing, but at this stage, it is more important to carry on making measurements, so that you finish the practical on time. 4. Repeat the measurement of the loudspeaker’s impedance for frequencies between 10 and 150 Hz. Aim to get about 25 values of Z, concentrating half of the points within 20 Hz of the (unloaded) resonant frequency found in Experiment 1. 5. In order to convert the values of height which you have measured into ohms, you will now need to measure the calibration constant called k in Appendix B. Do this as follows: Disconnect the loudspeaker from the circuit and replace it with the resistor of known value — you will probably be supplied with a 10 resistor. Then measure the height again and record this value. By looking at the theory of Appendix B, you should now be able to calculate k. What units does it have? (In passing, why is the phase difference between the current and voltage scopes now zero?) 6. Disconnect the known resistor and reconnect the loudspeaker, this time with the cone pointing downwards. Seal the speaker down with the specially designed clamp. Because no air can get into or out of the speaker enclosure, the amplitude of oscillation of the cone will be reduced to nearly zero. Since the speaker coil no longer moves appreciably, there will be no back e.m.f. Emotion and thus Zmotion makes no contribution to Zelec — see Appendix A. Hence, you will measure only Zcoil. Because of the way we measure it, this is often called the blocked impedance. Measure the impedance for frequencies uniformly spaced between about 20 and 500 Hz. 7. Finally, take the loudspeaker to the electrical workshop and measure L, the inductance directly. 6 4.3 Analysing your data 1. Read through Appendices A and B to ensure that you know what is happening in the experiment. 2. Using the height that you measured in the calibration experiment and the value of Rknown, work out the appropriate calibration constant k. What are its units? 3. Calculate |Z| for both sets of readings from your measured trace heights and the calibration constant just calculated. The value of ref gives you the phase of Z. Since have both the modulus and phase of the complex number Z, you can plot Re(Z) and Im(Z) against f. You may find this easier to do in a spreadsheet or graphing package. 4. What you have just plotted corresponds to two separate quantities. The first set of measurements gave the total electrical impedance Zelec, containing both the coil and motion terms; the second experiment gave the blocked impedance of the coil alone Zcoil. 5. Do the values of the blocked impedance of the loudspeaker vary in the way suggested by Eq. [17] and the text immediately following? From this graph you should be able to find R and L for the speaker. Compare these with the values found by direct electrical measurement. [ 6. Optional extra part: It can be shown theoretically that the impedance curves drawn in 10 should be exactly circular, with a radius (Bl2)/2Rcone. Starting with the formula for Zmotion, prove this. Hint: Treat the whole of the imaginary term as a variable which can take any value corresponding to 0 f . Multiply the top and bottom of the expression by the complex conjugate. This should give you parametric equations for x and y of the form x A 2 2 and y A 2 2 [6] Show that these forms satisfy the equation of a circle: (xA/2)2 + y2 = const. ] 5. References (1) Fundamentals of Acoustics, Kinsler et al., Third Edition, 1982, John Wiley and Sons, ISBN 0-471-09410-2, pp. 363–369. 7 Appendix A: Impedance in the loudspeaker system Our loudspeaker has both electrical and mechanical impedance. This is equivalent to saying that both the electrical and mechanical properties are governed by second order differential equations. By looking at the equation describing the damped simple harmonic motion of the loudspeaker system, it can be shown that the mechanical impedance is Zmech Zcone Zradiation , [7] where Zcone is the impedance associated with the movement of the cone assembly and Zradiation is the impedance associated with the broadcast of energy as sound by the speaker. Notice immediately how two mechanical processes, which involve “loads” on the speaker system from very different sources, can be inserted into the same equation very simply via the concept of impedance. In practice, Zradiation is very small and we shall ignore it. The major contribution is Z cone Rcone (im s / i ) Rcone i( m s / ), [8] where m is the mass of the cone and s is the stiffness of the cone “suspension”. Notice that: Rcone corresponds to energy losses when the cone edge and central supports flex. m is an “inductance-like” term, whilst 1/s plays the same role in these equations as capacitance does in an electrical circuit — designers of acoustic equipment often analyse their problems in terms of equivalent circuits with “mechanical” resistors, inductors and capacitors. All the terms in Eq. [8] have dimensions [M][T-1]. You should try and work this out from the dimensions of the individual quantities (s has units Nm-1). The unit of impedance is sometimes called the “mechanical Ohm”, where 1 M 1 Ns m -1 1 kg s -1 . [9] There will be a resonance where the reactive part of the Zcone goes to zero, i.e., when m 0 s / 0 8 0 = s . m [10] (a) (b) Suspension (gives stiffness, s) S S B F=BIl Magnet N N Cone Total mass of coil+cone = m B S S Coil Figure 1: (a) Simple moving coil loudspeaker; (b) close-up of magnet and coil system, showing how the force acts on the coil By measuring 0with different added masses, we can deduce both s and m. This is the basis of Experiment 1. The method of operation of the loudspeaker is explained in Fig. 1. A current is passed through the coil. This coil is situated in a magnetic field, which because of its cylindrical symmetry is constant for all segments of the wire. Thus, there is a force F on the coil. F BIl , [11] where B is the magnetic field and l is the total length of wire in the windings. The coil is attached to the cone, so if we apply an alternating current to the loudspeaker, the cone vibrates in and out. The velocity of the cone at any time is found by using our impedance equation v F / Zcone , with F F0 eit . [12] Because Zcone contains an imaginary component, the vibrational velocity will be out of phase with the force. 3.3 Electrical impedance of the loudspeaker circuit To find out what goes on in the speaker coil when we apply a voltage, we can draw an equivalent circuit, as in Fig. 2. We balance the potential difference 9 provided by the source against the potential drops over the various parts of the coil circuit. V IR EL Emotion , [13] where IR is the voltage drop across the resistive element of the circuit, EL is the back e.m.f. across the inductive element and Emotion is a second back e.m.f. caused by the fact that the coil is moving in a magnetic field. IR EL R L Emotion Zmotion ~V Figure 2: Equivalent circuit for the loudspeaker EL is given, as usual, by EL L dI . dt [14] To find Emotion, remember Faraday’s Law of Induction. The e.m.f. induced is the rate of cutting of magnetic flux by the wire. When it moves, each little element l of wire traces out an area vl per unit time. This means that the flux cut per unit time is Bvl. Again, because of the cylindrical symmetry of the problem, this is the same for any element of wire. The total rate of flux cutting, and hence the back e.m.f. is Emotion Bvl . [15] Substituting into this equation from [11] and [12] gives Emotion ( Bl ) 2 I. Z cone [16] We now have all the e.m.f.’s expressed in terms of the current and so we can write an electrical impedance equation: 10 V IZ elec I ( Z coil Z motion ) ( Bl ) 2 I R iL Z cone [17] ( Bl ) 2 = I R iL Rcone i (m s / ) From this, we can work out the relationship between the input voltage to the cone and the force, current, motion, etc. Notice how the total impedance can be regarded usefully as the sum of two parts: (i) the coil impedance in the absence of motion, Zcoil = R+iL; (ii) the extra impedance caused by the fact that the coil is moving in a magnetic field. Clearly this term will be related both to the strength of the magnetic field and the mechanical impedance. Note, in this case, that the larger the mechanical impedance of the coil (i.e., the harder it is to move), the smaller this contribution to the total electrical impedance becomes, so we have 1/Zcone. From the measurements of resonant frequency made in Experiment 1, we have an estimate of Zcone. If we “block” the coil (i.e., stop it moving at all), then Zcone and the second term becomes zero. This provides a method of measuring just Zcoil and so to calculate Zelec. However, we can also measure Zelec independently. Hence we can test Eq. [8] directly. This is the basis of Experiment 2. Further explanations concerning moving coil loudspeakers are found in Ref. (1). 11 Appendix B: Measurements of complex impedance The theory behind measuring the complex impedance of the loudspeaker is as follows. Let us suppose that the output of the zero-phase terminal of the oscillator is V0 e it and the corresponding output from the variable-phase terminal, which goes to the x-plates of both ’scopes, is V0 e i (t ) . The output of the inverting amplifier will be GV0 e it , where G is the gain of the amplifier. This is what goes to the yplate of the “voltage” scope. This voltage is across the low resistor r and the unknown impedance of the loudspeaker. Thus, the current going through the system is I GV0 e it GV0 e it , Z r Z [18] where the approximation holds good if r<<Z. The part of the circuit connected to the “current” ’scope is simply a means of measuring this current I by finding the voltage which it produces across r. Since r is very small, the voltage, too, is small and so we need to amplify it. This is done using the differential amplifier, which we shall assume has a gain g. The input voltage to the y-plates of the current scope is Vr g Ir g GV0 eit k r eit . Z Z [19] The readings on your two oscilloscopes are summarised in the table below: x y Voltage ’scope V 0 e i ( t ) GV0 e it Current ’scope V 0 e i ( t ) k i t e Z Table 1: Readings on the “current” and “voltage” oscilloscopes. The beauty of writing Vr in the final form of Eq. [19] is that we do not need to know the values of r, V0, g and G. Instead, we make a calibration measurement with a known resistor. If we replace the loudspeaker with a known resistance and set Z = Rknown in Eq. [18], we obtain: 12 k Rknown Vr [19] and the resultant calibration constant allows us to calculate |Z| for all other measurements made with the loudspeaker. For the general case, we can re-write Vr as below: Vr k i (t ) e Z [20] The process of adjusting the two ‘scopes so that we get a straight line is equivalent to adjusting them so that the part of the x-input is equal to the phase angle of the y-input. This gives us a measure of the phase angle of the y-inputs in both cases. For the voltage scope, we expect this to be approximately zero (our reference), but for the current scope, we will measure , where is the phase of the desired impedance. 13
 0
0
advertisement




Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users