display - EDGE - Rochester Institute of Technology
advertisement

DOC 01-302 REV 00
Design Survey
Revision History:
Number
00
Description
Release
Author
Team
Date
2/14/2007
0
DOC 01-302 REV 00
Design Survey
Team Member Discipline
Role
email address
Wayne Walter
ME
Guide
wwweme@rit.edu
Jeff Webb
ME
Consultant
jbw3914@rit.edu
George Slack
EE
Consultant
gbseee@rit.edu
A. David Gomez ME
Project Manager
adg2989@rit.edu
Benjamin Smith ME
Mechanical Systems Designer
bds7756@rit.edu
Jeff Gill
ME
Mechanical Systems Craftsman jcg7627@rit.edu
Jesse Baker
ME
Systems Integration
jtb5449@rit.edu
Tian Zheng
EE
Controls Systems Engineer
tmz9427@rit.edu
James Aclub
EE
Electrical Systems Engineer
jma4815@rit.edu
Aman Verma
EE
Electrical Systems Craftsman
axv9757@rit.edu
James Harris
EE
Software Engineer
jah7000@rit.edu
1
DOC 01-302 REV 00
Design Survey
Contents
Revision History:................................................................................................................................................ 0
Contents ............................................................................................................................................................ 2
Detailed Contents .............................................................................................................................................. 3
Functional Decomposition ................................................................................................................................. 6
Sub-systems v. Customer Needs ...................................................................................................................... 7
Selected Concepts ............................................................................................................................................ 8
Mechanical..................................................................................................................................................... 8
Electrical ........................................................................................................................................................ 8
Assembly ........................................................................................................................................................... 9
Electrical Connections ..................................................................................................................................... 11
Total Costs ...................................................................................................................................................... 12
Note on Compliance ........................................................................................................................................ 13
Risk Assessment ............................................................................................................................................. 14
Failure Mode and Effects Analysis ............................................................................................................... 14
Mechanical Subsystems .................................................................................................................................. 15
Mechanical Bill of Materials .......................................................................................................................... 16
Reliability of ANSYS Simulations ................................................................................................................. 17
1. Frame ...................................................................................................................................................... 19
2. Payload Mount ......................................................................................................................................... 31
3. Motor Mount ............................................................................................................................................. 45
4. Mechanical Protection .............................................................................................................................. 51
Tube Inserts Benchmarking ......................................................................................................................... 53
ELECTRICAL .................................................................................................................................................. 21
1) Cables and Connectors:........................................................................................................................... 22
2) Power Distribution Board: ....................................................................................................................... 23
3) Communications & User Interface............................................................................................................ 37
4) Communications and Hardware ............................................................................................................... 43
5) Accessories ............................................................................................................................................. 48
Standards Directory ......................................................................................................................................... 21
Federal ........................................................................................................................................................ 21
NY State Regulations ................................................................................................................................... 23
Sources and Useful Contacts ....................................................................................................................... 23
Keywords ..................................................................................................................................................... 23
Electronic Access Directory ............................................................................................................................. 25
2
DOC 01-302 REV 00
Design Survey
Detailed Contents
Revision History: ........................................................................................................................................................................................ 0
Contents ..................................................................................................................................................................................................... 2
Detailed Contents ....................................................................................................................................................................................... 3
Functional Decomposition .......................................................................................................................................................................... 6
Sub-systems v. Customer Needs ............................................................................................................................................................... 7
Selected Concepts ..................................................................................................................................................................................... 8
Mechanical ............................................................................................................................................................................................. 8
Electrical ................................................................................................................................................................................................ 8
Assembly .................................................................................................................................................................................................... 9
Electrical Connections .............................................................................................................................................................................. 11
Total Costs ............................................................................................................................................................................................... 12
Note on Compliance ................................................................................................................................................................................. 13
Risk Assessment ...................................................................................................................................................................................... 14
Failure Mode and Effects Analysis ....................................................................................................................................................... 14
Mechanical Subsystems ........................................................................................................................................................................... 15
Mechanical Bill of Materials.................................................................................................................................................................. 16
Reliability of ANSYS Simulations ......................................................................................................................................................... 17
Tube Test ........................................................................................................................................................................................ 17
Analytical Calculation .................................................................................................................................................................. 17
Directional Deformation ............................................................................................................................................................... 18
1. Frame............................................................................................................................................................................................... 19
Specifications .................................................................................................................................................................................. 19
Weight ......................................................................................................................................................................................... 19
Overall outer Dimensions ............................................................................................................................................................ 19
Benefits:........................................................................................................................................................................................... 19
Inexpensive ................................................................................................................................................................................. 19
Ease of assembly ........................................................................................................................................................................ 19
Robustness ................................................................................................................................................................................. 19
Expandability ............................................................................................................................................................................... 19
Calculations ..................................................................................................................................................................................... 21
Top load ...................................................................................................................................................................................... 21
Equivalent Stress ........................................................................................................................................................................ 22
Maximum Shear Stress ............................................................................................................................................................... 23
Total Deformation ........................................................................................................................................................................ 24
Safety Factor ............................................................................................................................................................................... 25
Bolt Shear/Tension Calculation table ............................................................................................................................................... 26
Bolt Adjustment................................................................................................................................................................................ 27
Fabrication ....................................................................................................................................................................................... 30
2. Payload Mount ................................................................................................................................................................................. 31
Features Summary .......................................................................................................................................................................... 31
Specifications .................................................................................................................................................................................. 31
Assembly Details ............................................................................................................................................................................. 33
Calculations and Simulation Summary ............................................................................................................................................ 35
T-Nut ........................................................................................................................................................................................... 35
Assembly..................................................................................................................................................................................... 39
Fabrication ....................................................................................................................................................................................... 44
3. Motor Mount ..................................................................................................................................................................................... 45
Features Summary .......................................................................................................................................................................... 45
Specifications .................................................................................................................................................................................. 46
Calculations and Simulation Summary ............................................................................................................................................ 47
Pressure Applied to Front, Collision Simulation........................................................................................................................... 47
Equivalent Stress ........................................................................................................................................................................ 48
Maximum Shear Stress ............................................................................................................................................................... 49
Total Deformation ........................................................................................................................................................................ 50
Fabrication ....................................................................................................................................................................................... 50
4. Mechanical Protection ...................................................................................................................................................................... 51
Features Summary .......................................................................................................................................................................... 51
Specifications .................................................................................................................................................................................. 51
3
DOC 01-302 REV 00
Design Survey
Assembly Drawings ......................................................................................................................................................................... 51
Part Drawings .................................................................................................................................................................................. 52
Tube Inserts Benchmarking ................................................................................................................................................................. 53
Summary ......................................................................................................................................................................................... 53
Test Specimen ................................................................................................................................................................................. 54
Bill of Materials ................................................................................................................................................................................ 54
Test 1: Axial force ............................................................................................................................................................................ 55
Test 2: Moment & Shear .................................................................................................................................................................. 55
Test 3: Handling............................................................................................................................................................................... 56
Results............................................................................................................................................................................................. 56
ELECTRICAL ........................................................................................................................................................................................... 21
1) Cables and Connectors: .................................................................................................................................................................. 22
Overview .......................................................................................................................................................................................... 22
Specifications: ................................................................................................................................................................................. 23
NEC Standards for Color Coding and Shielded Wires ................................................................................................................ 23
4 Pin Molex ................................................................................................................................................................................. 23
4 Pin ATX .................................................................................................................................................................................... 23
10-16 AWG ................................................................................................................................................................................. 24
DB-9 Connector........................................................................................................................................................................... 24
LED Drive .................................................................................................................................................................................... 24
Spade Screw terminals ............................................................................................................................................................... 25
Top Level Electrical Subsystem Wiring Block Diagram: .................................................................................................................. 21
Detailed Wiring Diagram .................................................................................................................................................................. 21
Calculations ..................................................................................................................................................................................... 21
Cost: ................................................................................................................................................................................................ 21
Risk Assessment ............................................................................................................................................................................. 21
Safety .............................................................................................................................................................................................. 22
2) Power Distribution Board: ............................................................................................................................................................... 23
Overview (Features Summary) ........................................................................................................................................................ 23
Preliminary Power Board Design ..................................................................................................................................................... 24
RP100 Solution ........................................................................................................................................................................... 25
RP10 Solution ............................................................................................................................................................................. 26
Simulation ........................................................................................................................................................................................ 27
RP100 Solution ........................................................................................................................................................................... 27
RP10 Solution ............................................................................................................................................................................. 30
Bill of Materials ................................................................................................................................................................................ 33
Safety .............................................................................................................................................................................................. 34
TPS5420 Safety Features: .......................................................................................................................................................... 34
LM3478 Safety Features ............................................................................................................................................................. 35
LTC3780 Safety Features ........................................................................................................................................................... 35
Risk Assessment ......................................................................................................................................................................... 35
Testing Procedure ........................................................................................................................................................................... 36
3) Communications & User Interface ................................................................................................................................................... 37
Overview .......................................................................................................................................................................................... 37
Concept Design ............................................................................................................................................................................... 38
User Interface Design.................................................................................................................................................................. 38
SBC Software Design.................................................................................................................................................................. 39
Analysis and Testing........................................................................................................................................................................ 39
PC User GUI ............................................................................................................................................................................... 39
Platform Software ........................................................................................................................................................................ 40
PC GUI to Platform Software Communication ............................................................................................................................. 40
Platform Software to Motor Module ............................................................................................................................................. 40
Software stress analysis.............................................................................................................................................................. 40
Calculations ..................................................................................................................................................................................... 41
Cost ................................................................................................................................................................................................. 41
Risk Assessment ............................................................................................................................................................................. 41
Safety .............................................................................................................................................................................................. 42
Contingency Planning ...................................................................................................................................................................... 42
4) Communications and Hardware ....................................................................................................................................................... 43
Overview .......................................................................................................................................................................................... 43
Flowcharts ....................................................................................................................................................................................... 43
4
DOC 01-302 REV 00
Design Survey
Analysis Summary ........................................................................................................................................................................... 45
Data Collection and Analysis ........................................................................................................................................................... 46
Keypress() ................................................................................................................................................................................... 46
Inputs() ........................................................................................................................................................................................ 46
Pseudo-code of Data Collection (MATLab) ................................................................................................................................. 46
Risk Assessment ............................................................................................................................................................................. 47
5) Accessories ..................................................................................................................................................................................... 48
Ambient light sensor Overview ........................................................................................................................................................ 48
Design ............................................................................................................................................................................................. 48
Sensor Concept Design Overview ................................................................................................................................................... 50
Design and Analysis: ....................................................................................................................................................................... 51
Bill of Materials ................................................................................................................................................................................ 53
Risk Assessment ............................................................................................................................................................................. 53
Standards Directory .................................................................................................................................................................................. 21
Federal ................................................................................................................................................................................................. 21
Drafting ............................................................................................................................................................................................ 21
Electrical Diagrams .......................................................................................................................................................................... 22
Safety .............................................................................................................................................................................................. 22
Occupational Safety .................................................................................................................................................................... 22
General Public Safety.................................................................................................................................................................. 23
Equipment ................................................................................................................................................................................... 23
Fire Prevention ............................................................................................................................................................................ 23
Industrial Robots Safety .............................................................................................................................................................. 23
NY State Regulations ........................................................................................................................................................................... 23
Sources and Useful Contacts ............................................................................................................................................................... 23
Services available through the Wallace Library ............................................................................................................................... 23
Engineering Librarian .................................................................................................................................................................. 23
Westlaw database ....................................................................................................................................................................... 23
Compendex database ................................................................................................................................................................. 23
IEEE Standards Style Manual ..................................................................................................................................................... 23
Library Catalog ............................................................................................................................................................................ 23
US law ............................................................................................................................................................................................. 23
Keywords ............................................................................................................................................................................................. 23
Electronic Access Directory ...................................................................................................................................................................... 25
5
DOC 01-302 REV 00
Design Survey
Functional Decomposition
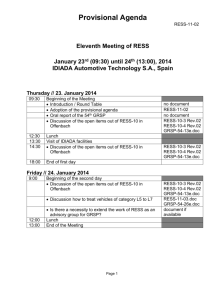
P07205 ROBOTIC PLATFORM SUBSYSTEMS BLOCK DIAGRAM
Energy
Power
storage +
distribution
OC
protection
Data
User actions
+
coordinates
User
interface
(hardware)
CPU
(PC104)
electrical
Accessories
Future
mdules
Environment
Motor
controller
Sensors
Motor module
(electrical)
DAQ
ELECTRICAL SUBSYSTEMS
Controlled motion
(with payload)
Related project
modules
Internal
layout
Wiring
Bumper
system
Shell
Motor module
Payload
Motor mount
Frame
General Shape
(RP100A
RP100B)
Payload
attachment
Platform
(top)
MECHANICAL SUBSYSTEMS
REV. 1.0
6
DOC 01-302 REV 00
Design Survey
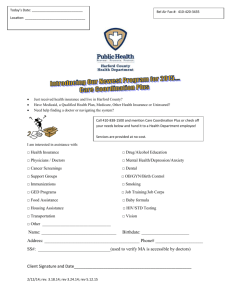
Sub-systems v. Customer Needs
7
DOC 01-302 REV 00
Design Survey
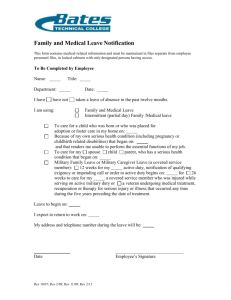
Selected Concepts
Mechanical
Frame
Motor Mount
-Sq tubular
Quick-release Al
expandable
plate
frame
-Low-CG sliding
battery holders
Payload
Attachment
Mechanical Protection
Modular adjustable
T-slotted beams
-Thermoformed polyurethane
belt protector
-Extruded aluminum
electronic cases
-Translucent polycarbonate
panels
Electrical
Power
Connectivity
Safety
Communication
Centralized
power board
Quick-installation,
labeled screw
connectors
Spade Screw
Connectors
-Kill switches
-Proximity sensors
Real-time wireless LANbased PC link
Electrical
Protection
Hot-plug current
limiters
- Potential adaptability - Tethered Laptop
of Ultrasonic Sensors - Wireless Control
4 Pin Molex
4 Pin ATX Molex
DB-9 Connector
8
DOC 01-302 REV 00
Design Survey
Assembly
9
DOC 01-302 REV 00
Design Survey
Six module expansion
Four module configuration
10
DOC 01-302 REV 00
Design Survey
Electrical Connections
11
DOC 01-302 REV 00
Design Survey
Total Costs
Including
One four-motor-capable platform without motor modules with basic payload attachment without Safety
Bumpers system
One three-motor-capable platform without motor modules with basic payload attachment without Safety
Bumpers system
One Power Board to be shared with P07204
Wiring for both four-motor-capable and three-motor-capable platforms to be shared with P07204
Mechanical Components
Wiring
Power Board
Electronics Enclosures
Total
547.99
81.98
95.00
110.00
834.97
This system does not include batteries
Please refer to subsystem details for more information
12
DOC 01-302 REV 00
Design Survey
Note on Compliance
RP100 and RP10 recognize the importance of compliance as a Customer Need and crucial part of assuring
the customer with a quality product.
Due to the complexities presented by the compliance to regulations process, it was determined that waiting
until all relevant regulations are identified and understood before designing the platform was not a viable
option. Instead, the teams went ahead and used their best discretion to include compliance into their designs
focusing first and foremost in safety.
In addition to this effort, a directory of relevant standards and laws was created in order to identify the
particular codes so that future teams can have a head start in this issue.
13
DOC 01-302 REV 00
Design Survey
Risk Assessment
Failure Mode and Effects Analysis
Event though there is a Risk Assessment associated to the subsystems of the platform, from a general
perspective, a FMEA of the entire systems is being implemented in order to identify and quantify possible
problems and establish a course of action. The following table presents some of the subsystems and their
different modes of failure.
Once RPN values are found a corrective action is issued. The modes of failure with higher ratings are
considered more carefully than those with lower ratings.
14
DOC 01-302 REV 00
Design Survey
Mechanical Subsystems
The subsystem decomposition of our design concepts will be presented as follows in the subsequent pages of
this document:
1. Frame
2. Payload Mount
3. Motor Mount
4. Mechanical Protection
15
DOC 01-302 REV 00
Design Survey
Mechanical Bill of Materials
16
DOC 01-302 REV 00
Design Survey
Reliability of ANSYS Simulations
Tube Test
Material type: Structural steel.
Material Properties:
E = 2e11 Pa
v = .3
ρ = 7850 kg/m3
Sy = 2.5e8 Pa
Su = 4.6e8 Pa
2.9e7 psi
.3
.284 lbm/in3
36.26 ksi
66.72 ksi
Analytical Calculation
W
a
b
l
I
a 4 b 4 .75 4 .514
.02073in 4
12
12
max
Wl 3
55.14 * 27 3
.0047in =1.19e-4m
384 EI 384 * 2.9e 7 * .02073
ANSYS resulted: = .0027in = 6.7e-5m
The difference is .002in or 5.24e-5m
Conclusion ANSYS is producing reasonable results and can be used for further analysis.
Pressure Applied:
1914.24 Pa, .278 psi
17
DOC 01-302 REV 00
Design Survey
Directional Deformation
Maximum Deflection: 6.72e-5 m, 2.65e-3 in
18
DOC 01-302 REV 00
Design Survey
1. Frame
Specifications
Weight
15.42kg, 34 lb
Overall outer Dimensions
80x59x67cm
Benefits:
Inexpensive
Use of common materials
Ease of assembly
Uses the same material in all parts
All bolts are interchangeable
Only three lengths of tube are to be produced
Welding is not required
The same connectors are used in all joints
Robustness
Allows motor ventilation
These tubes are structurally sound even above the required payload
Expandability
The same frame can be extended to hold up to 10 motor modules or as few as four
Internal volume suffices for a the required stack of pc104 and batteries see figures below
19
DOC 01-302 REV 00
Design Survey
Expandability (continued)
Four module frame
Four module frame
Six module frame
20
DOC 01-302 REV 00
Design Survey
Calculations
Top load
21
DOC 01-302 REV 00
Design Survey
Equivalent Stress
22
DOC 01-302 REV 00
Design Survey
Maximum Shear Stress
23
DOC 01-302 REV 00
Design Survey
Total Deformation
24
DOC 01-302 REV 00
Design Survey
Safety Factor
25
DOC 01-302 REV 00
Design Survey
Bolt Shear/Tension Calculation table
26
DOC 01-302 REV 00
Design Survey
Bolt Adjustment
Loads
27
DOC 01-302 REV 00
Design Survey
Equivalent Stress
28
DOC 01-302 REV 00
Design Survey
Maximum Shear Stress
29
DOC 01-302 REV 00
Design Survey
Total Deformation
Fabrication
Tube inserts may require to be ordered as soon as possible since they may require a two week lead time.
Plexiglas is cut to size so customization prices and lead time may apply.
30
DOC 01-302 REV 00
Design Survey
2. Payload Mount
Features Summary
The payload mount was designed in such a way to reduce weight and cost while achieving strength
and the ability to accommodate payloads of various size and shapes. Although only two cross rails we be
developed more can be added to suit the user’s needs, up to thirty. Aluminum 6061 was chosen for its
strength to weight ratio and ease of machining.
Specifications
Material properties of Aluminum 6061
Physical Properties
Density
Metric
English
Comments
2.7 g/cc 0.0975 lb/in³
AA; Typical
Mechanical Properties
Hardness, Brinell
30
30
AA; Typical; 500 g load; 10 mm ball
Ultimate Tensile Strength 124 MPa
18000 psi
AA; Typical
55.2 MPa
8000 psi
AA; Typical
Elongation at Break
25 %
25 %
AA; Typical; 1/16 in. (1.6 mm) Thickness
Elongation at Break
30 %
30 %
AA; Typical; 1/2 in. (12.7 mm) Diameter
68.9 GPa
10000 ksi
AA; Typical; Average of tension and compression. Compression
modulus is about 2% greater than tensile modulus.
Ultimate Bearing Strength 228 MPa
33100 psi
Edge distance/pin diameter = 2.0
Bearing Yield Strength
103 MPa
14900 psi
Edge distance/pin diameter = 2.0
0.33
0.33
Estimated from trends in similar Al alloys.
62.1 MPa
9000 psi
AA; 500,000,000 cycles completely reversed stress; RR Moore
machine/specimen
30 %
30 %
0-100 Scale of Aluminum Alloys
Shear Modulus
26 GPa
3770 ksi
Estimated from similar Al alloys.
Shear Strength
82.7 MPa
12000 psi
AA; Typical
Tensile Yield Strength
Modulus of Elasticity
Poisson's Ratio
Fatigue Strength
Machineability
Properties table
31
DOC 01-302 REV 00
Design Survey
Lengths of 1x1”material required:
Rectangle
Triangle
Length (m)
3.70
3.54
Length (ft)
9.4
9
The machined rails have a mass per unit length as shown below:
kg/m
1.33
lb/ft
0.894
The total mass of each platform will be:
Rectangle
Triangle
Mass (kg)
4.92
4.71
Mass (lb)
8.40
8.05
Fastener type:
M6x1x12 bolt and M6x1 T-Nut
Maximum usable platform area:
0.02 m2
32
DOC 01-302 REV 00
Design Survey
Assembly Details
Basic payload mounting module
T-nut rail connection
33
DOC 01-302 REV 00
Design Survey
Side view
34
DOC 01-302 REV 00
Design Survey
Calculations and Simulation Summary
T-Nut
Pressure
35
DOC 01-302 REV 00
Design Survey
Equivalent Stress
Maximum Shear Stress
36
DOC 01-302 REV 00
Design Survey
Total Deformation
Safety Factor
37
DOC 01-302 REV 00
Design Survey
Shear on threads
D
Ath .5d p Le
d p D .64952 p
Le
d p 6 .64952(1) 5.35
F/A
444.82 / 84.04
5.29 N/mm2
5.29 MPa
Factor of Safety = 55.2/5.29 = 10.43
38
DOC 01-302 REV 00
Design Survey
Assembly
Pressure
Equivalent Stress
39
DOC 01-302 REV 00
Design Survey
Maximum Shear Stress
Total Deformation
40
DOC 01-302 REV 00
Design Survey
Safety Factor
Force
41
DOC 01-302 REV 00
Design Survey
Equivalent Stress
Maximum Shear Stress
42
DOC 01-302 REV 00
Design Survey
Total Deformation
43
DOC 01-302 REV 00
Design Survey
Safety Factor
Fabrication
The cutting of the t-nut slot must be divided into 10 passes of 1.1mm cuts. Given that aluminum is a
soft material a milling speed of 600 to 800 RPM is recommended. Fabricating the t-nuts in house will reduce
the cost significantly.
No items of particularly long lead times have been identified on this subsystem.
44
DOC 01-302 REV 00
Design Survey
3. Motor Mount
Features Summary
The ability to change all motors in 120 seconds is a customer requirement, and this is not possible with
the four bolts the stock plate contains. It was necessary to create another plate to mount to the stock plate.
This plate snaps in place, lending a secure hold to the plate. This plate mount is fully compatible on RP 100A
and B, even RP20 motors.
Plate in assembly
45
DOC 01-302 REV 00
Design Survey
Specifications
Material properties of Aluminum 6061
Physical Properties
Density
Metric
English
Comments
2.7 g/cc 0.0975 lb/in³
AA; Typical
Mechanical Properties
Hardness, Brinell
30
30
AA; Typical; 500 g load; 10 mm ball
Ultimate Tensile Strength 124 MPa
18000 psi
AA; Typical
55.2 MPa
8000 psi
AA; Typical
Elongation at Break
25 %
25 %
AA; Typical; 1/16 in. (1.6 mm) Thickness
Elongation at Break
30 %
30 %
AA; Typical; 1/2 in. (12.7 mm) Diameter
68.9 GPa
10000 ksi
AA; Typical; Average of tension and compression. Compression
modulus is about 2% greater than tensile modulus.
Ultimate Bearing Strength 228 MPa
33100 psi
Edge distance/pin diameter = 2.0
Bearing Yield Strength
103 MPa
14900 psi
Edge distance/pin diameter = 2.0
0.33
0.33
Estimated from trends in similar Al alloys.
62.1 MPa
9000 psi
AA; 500,000,000 cycles completely reversed stress; RR Moore
machine/specimen
30 %
30 %
0-100 Scale of Aluminum Alloys
Shear Modulus
26 GPa
3770 ksi
Estimated from similar Al alloys.
Shear Strength
82.7 MPa
12000 psi
AA; Typical
Tensile Yield Strength
Modulus of Elasticity
Poisson's Ratio
Fatigue Strength
Machinability
Properties table
Amount of Material Required
Length (m)
.509
Width (m)
.218
Thickness (m)
.0065
Length (ft)
1.67
Width (ft)
.716
Thickness (ft)
.025
Mass of both plates
Mass (kg)
.23
Mass (lb)
.5
46
DOC 01-302 REV 00
Design Survey
Calculations and Simulation Summary
Pressure Applied to Front, Collision Simulation
47
DOC 01-302 REV 00
Design Survey
Equivalent Stress
48
DOC 01-302 REV 00
Design Survey
Maximum Shear Stress
49
DOC 01-302 REV 00
Design Survey
Total Deformation
Fabrication
One plate section would be purchased and machined in-house. Because Aluminum is a soft material,
milling for the holes would use a speed of 600-800 RPM.
50
DOC 01-302 REV 00
Design Survey
4. Mechanical Protection
Features Summary
Mechanical protection in the form of Plexiglas will be secured above the chassis to prevent foreign
objects from entering from above and potentially damaging the internal components. While not only providing
protection, this feature will also allow onlookers the ability to view the inside of the robotic platform with ease.
Safety bumpers would be mounted around the exterior of the frame. These are special bumpers that when hit
will activate a kill switch.
Specifications
The Plexiglas has a density of 1.19 g/cc. The overall dimensions are 615.9x779.3x3.175mm giving this
part a volume of 59996.36 mm3 which yields a mass of .0714 kg.
A minimum force of 150N, from a round object of 80mm diameter, is required to activate the switch. A
length of 3.17m is required to completely surround the platform.
Assembly Drawings
51
DOC 01-302 REV 00
Design Survey
Part Drawings
52
DOC 01-302 REV 00
Design Survey
Tube Inserts Benchmarking
Summary
This was a test to discover the reliability of the insert, a nut not used before on this platform. The test explored
the reliability of the nut with and without inserts; two sides of the specimen had inserts and two didn’t.
53
DOC 01-302 REV 00
Design Survey
Test Specimen
This picture reveals the size of the test specimen. Obviously, both sides have the insert, but one side has
additional inserts, while the other does not. The insert provided wedging support to the first insert.
The dimensions of this specimen were as follows:
4-7/16 inches wide by 10-3/8 inches long.
From the picture, the right side did not have inserts, and the left side did.
The longer pieces were cylindrical, ¾ inches in diameter. The shorter pieces had a square cross section, ¾
inches per side.
The bolts were M6 socket cap bolts, 40-mm long.
The inserts were on top of the nut, so the nut pulled into the insert, giving extra force.
Bill of Materials
1-foot section of low-carbon steel, ¾-inch square, 1/16-inch wall thickness, $1.99
2-foot section of low-carbon steel, ¾-inch diameter, 1/16-inch wall thickness, $8.78
Twenty-five 316 stainless steel socket cap screws, M6, 40-mm length partially threaded, $19.20
4 inserts, $5.16
54
DOC 01-302 REV 00
Design Survey
Total: $35.22
Test 1: Axial force
The total mass of the platform is180 lb. 8 tiger claw nuts will be used, dividing the lifting force to 22.5 lbs per
nut. Raising this number to a factor of safety of 1.6 gives a weight of 35 lbs per nut, and the total weight two
will have to lift, two at each end, will be 70 lbs. Thus, the specimen was tested at 70 lbs.
Test 2: Moment & Shear
The same weights were applied at the corners of the frame, adding shear and moment forces. The nuts are
recommended for 500 lbs.
55
DOC 01-302 REV 00
Design Survey
Test 3: Handling
The frame was rigorously shaken and twisted by hand, to see if this and the aforementioned tests produced
instability.
Results
For the first two tests, the specimen encountered no instability, and remained firmly assembled. The third test
revealed some undesirable instability: not much, but it would become worse over time.
Center Of Gravity
Using Statics (moments)
H = 34.2 cm
L = 39.6 cm
W = 4.8 cm
56
DOC 01-302 REV 00
Design Survey
ELECTRICAL
The following section contains detailed design information for the electrical portion of the platform. All design decisions
made regarding safety, implementation, component selection, and testing procedures are gone over in depth for each of
the platform subsystems. Graphs, flowcharts, block diagrams and pseudo code for all concepts are included where
needed. Because of the similarity between the 10Kg and 100Kg electrical systems, the resources of both teams have
been combined where permissible. To distribute the workload, at least one individual from each team was involved in the
design process for each subsystem.
The subsystem decomposition of our design concepts will be presented as follows:
5.
6.
7.
8.
9.
Wiring and Connectors/PC 104 Enclosure
Power
Communication/User Interface
Coordinate Storage/Software
Accessories:
Schematics and the corresponding datasheets for all components used can be found in the attached appendix.
21
DOC 01-302 REV 00
Design Survey
1) Cables and Connectors:
Overview
Wiring is one of the most critical phases of design because the complete functionality of the platform depends on
it. Proper wiring and connections within the platform will ensure equipment protection and safety. In determining which
concepts to choose, the following had to be considered: safety, regulation, ability to meet specification, modularity,
robustness, and adaptability. Due to the similarities in the electronics of the 100kg and 10 kg platforms, both teams
decided to combine resources and adopt the same wiring and connector concepts. The only differences will be the
difference in the wire gauges connected to the motor modules due to different current consumption needs.
Data and power cabling both need to be properly designed in order to accommodate the required needs of all the
subsystems. A main objective in choosing the wires and connectors is to minimize power and data loss which can be
obtained by proper installation and good understanding of the constraints and capabilities of the connectors and wires.
The wire sizes were chosen with regard to the platform power needs. 16 AWG wires were chosen for data cabling due to
the low power consumption of the electronic components. 10 AWG wires were chosen for power cabling. For the 100kg
robotic platform team, the current consumption for the motor module is as high as 27 Amps with a spike value of up to 87
Amps, which requires the use of 7 AWG wire. Due to price and availability issues, 10 AWG wires are being used. This can
lead to safety concerns due to the low current handling capability of the 10 AWG wires.
Due to budget constraints, shielded color coding wiring design will not be adopted. Although it will allow ease in
understanding the wiring design, other methods such as labeling will have to be adopted instead. Corrugated tubing might
be considered during the future final stages of the project to add more robustness and organization to the wires. Choosing
the connectors depended on the modules which were provided by the other teams on the Vehicle Systems Technology
Track. Other teams, such as the data acquisition, motor control, and motor module teams has incorporated connectors
into their design. The main concern is to be able to connect those modules in a safe and reliable manor.
22
DOC 01-302 REV 00
Design Survey
Specifications:
NEC Standards for Color Coding and Shielded Wires
•
Black – Negative
•
Red – Positive
•
Green - Ground
4 Pin Molex
600 V rating
Temperature: -40 to 105 C
ROHS compliant
4 circuit Brass Connector
Figure E1.1: 4 Pin Molex
4 Pin ATX
Pitch 4.2 mm
Current up to 9A
Contact Resistance: 10m ohm
Voltage: 600 V
Temperature: -40 t 105 C
Figure E1.2: 4 Pin ATX
23
DOC 01-302 REV 00
Design Survey
10-16 AWG
•
Temperature: -40 to 80 C
•
Voltage Rating: 1000 V
•
Strand: 26/30
•
Length: 100 ft
Figure E1.3: Wire
DB-9 Connector
•
9 Pin
•
1.15 mm Drill
•
Minimum PCB Tin Plating to be 0.003 mm thick over 0.002 +- 0.001 thick copper
Figure E1.4: DB-9 Connector
LED Drive
Drives 6 LEDs from 2.6 V to 5.5 V (Li-Ion) input supply
1×/1.5×/2× fractional charge pump to maximize power efficiency
1% max LED current matching
Up to 88% power efficiency over Li-Ion range
2.5 to 5 mA current supply
Shutdown Current 5 uA
24
DOC 01-302 REV 00
Design Survey
Spade Screw terminals
Copper Terminals
10-12 AWG wires
Stud Size 8
Figure E1.5: Spade Screw Terminal
25
DOC 01-302 REV 00
Design Survey
Top Level Electrical Subsystem Wiring Block Diagram:
Figure E1.6: Block Diagram
21
DOC 01-302 REV 00
Design Survey
Detailed Wiring Diagram
Figure E1.7: Detailed Wiring Diagram
Metric conversion: 1 inch = 0.0254 m
21
DOC 01-302 REV 00
Design Survey
Calculations
AWG
Diameter
Turns
of wire
Area
Current
Rating
Max Current
Rating
(per
(mm²)
(A)
(A)
cm)
6
4.115
2.43
13.3
37
101
7
3.665
2.73
10.5
30
89
8
3.264
3.06
8.37
24
73
9
2.906
3.44
6.63
19
64
10
2.588
3.86
5.26
15
55
11
2.305
4.34
4.17
12
47
12
2.053
4.87
3.31
9.3
41
13
1.828
5.47
2.62
7.4
35
14
1.628
6.14
2.08
5.9
32
15
1.45
6.89
1.65
4.7
28
16
1.291
7.75
1.31
3.7
22
Table E.1.1: Wire Gauge Current Specifications (NEC Standards 2005)
(mm)
Note: The cross-section area is also roughly proportional to the maximum current that a wire can
carry safely.
With respect to the 100Kg Robotic Platform, the maximum current intake is 27 A. For this reason
7-8 AWG wire would be appropriate. Instead 10 AWG is being adopted due to extremely high
price of 7 AWG wires.
For the 10Kg Robotic Platform, the maximum current intake will be 4 A, and hence, the 10 AWG
wire can be used without any problem.
21
DOC 01-302 REV 00
Design Survey
Cost:
Table E1.2: Bill of Materials
Note: The budget might drop below $ 81.98 if samples are available. Also, if the 16 AWG and the 10 AWG are not available from the RIT
resources, then the budget will increase $ 255.00
The lead time on the all the components is a maximum of 14 days; this was determined by contacting each vendor. The time required for the most
economical shipping method was calculated as the worst case lead time.
21
DOC 01-302 REV 00
Design Survey
Risk Assessment
Risk Correspondin Correspondin
Description of Risk
Probability Impact Importance Classificatio Mitigation Strategy
ID
g
g
(0 – 1)
(low, med,
n
(1-4)
Spec #’s(10kg)
Spec
high)
#’s(100kg)
1
NA
1.1,1.5
Using 10 AWG wires instead of
0.9
med
3
Technical Make sure over current
7 AWG
protection works
properly
2
18,19,62
0.5
Low
1
Safety/Budge
t
Using wiring labels
3
12
1.1,1.5
Improper grounding
0.1
High
4
Safety
Double check wiring
and connections before
powering platform
4
11
1.1,1.5
Plugging in power and ground
backwards
0.1
High
3.5
Safety
Have clearly labeled
warning signs
5
12
1.1,1.5
Shorting/Breaking of wires
0.1
Med
3.5
Safety
Technical
Proper installation with
corrugated tubing
6
62
5.1,8.1,8.4,11.1 Not being able to get wires for
free.
0.5
Med
3
Budget
12,18,19,62
1.1,1.5,5.1,8.1,
8.2,6.1
Not using corrugated tubing
0.5
Low
1
46
7.2, 7.4
Sensor mount cannot
accommodate sensor
0.5
low
2
2
1.1,1.4,1.5,1.6
Enclosure Overheat
.3
High
3
7
1.1,1.5,2.5,5.1, Not using color coded wires due
8.2,8.4
to tight budget
8
9
Avoid color coding and
use 1 color.
Adopt wire labeling.
Contact additional
suppliers for
donations/samples
Safety/Budge Using wiring labels
t
Use shrink tubing
Technical Make sensor mounting
procedure as generic as
possible
Safety/Budge Conduct bench testing
t
to measure ambient
temperature inside
21
enclosure
DOC 01-302 REV 00
Design Survey
Safety
Overall safety of the robotic platform is a major concern of this project. The order of precedence of safety is as follows;
protect the user first, then the environment, and lastly the robotic platform itself. The major concern in choosing the wiring
concepts and connectors is that the user can clearly understand the wiring layout. This will be done by using wire labeling.
This will prevent the user from getting shocked or shorting out any electronic components. The sizes of wires were chosen
based on the worst case current handling requirements which include the initial spikes in currents from the motor module
startups. Table E 1.1 shows the wire gauge current specifications. From that table, the use of 16 AWG and 10 AWG wires
was determined as the wires to be used to connect the electronic components and power to the platform.
Reference:
Enclosure for battery
http://www.hammondmfg.com/1455ZT.htm
Enclosure for PC 104
http://www.diamondsystems.com/products/cantainer#kc
22
DOC 01-302 REV 00
Design Survey
2) Power Distribution Board:
Overview (Features Summary)
From an electrical standpoint, one of the main jobs of the robotic platform for both the 10kg and 100kg teams is the
distribution of power from the platform’s battery sources to its many subsystems. These subsystems include the motor
control module, motor module, data acquisition module, small board computer, and user accessories. Each subsystem
has unique power needs and therefore a robust power distribution system must be developed. The power specification of
the power distribution board, and thereby the power needs for the platform, are summarized in table E2.1 and E2.2 for the
RP10 and RP100 teams, respectively. The tables also specify which subsystems require a regulated (+/-5%) voltage input
to operate correctly.
Subsystem
Voltage
(V)
Current
(A)
Total
Power
(W)
Regulated
Source
Needed?
Motor Control
12
1.0
12
No
12
2.0
24
No
Motor Module
24
4.0
96
No
Small Board
12
0.5
6
Yes
Computer
5
1.0
5
Yes
DAQ
12
1.5
18
No
5
2.0
10
Yes
Accessories
12
2.0
24
Yes
Table E2.3: Platform Power Needs RP10, two motor module configuration
Subsystem
Voltage
(V)
Current
(A)
Total
Power
(W)
Regulated
Source
Needed?
Motor Control
12
1.0
12
No
12
2.0
24
No
Motor Module
24
28
672
No
Small Board
12
0.5
6
Yes
Computer
5
1.0
5
Yes
DAQ
12
1.5
18
No
5
2.0
10
Yes
Accessories
12
2.0
24
Yes
Table E2.2: Platform Power Needs RP100, two motor module configuration
The platform is to have two sources of power; a 12V battery source for the electrical systems and a 24V batter source for
the motor modules. Based on work done by the motor module teams (P07201 and P07202), a 12V sealed lead acid
battery from B.B. Battery Co. (part number BP28-12) was chosen as the power source for the platform. Two of these
batteries are to be stacked in series to provide the 24V needed to power the drive motors while one battery will be used to
provide 12V to the electronics. Figure E2.1 shows a top level view of the platform’s power distribution needs.
23
DOC 01-302 REV 00
Design Survey
Figure E2.8: Top level platform power needs
Preliminary Power Board Design
For those modules requiring an unregulated input voltage, their supply voltage can be taken directly off the battery, as
shown in figure E2.1. For the sources requiring a regulated input to function correctly, their supply voltage cannot be taken
directly off the battery. This is because battery voltage is actually a function of current draw and remaining battery charge,
as shown in figure E2.2.
Figure E2.9: Battery voltage as a function of current draw and battery charge. (LTC3780 Datasheet)
From figure E2.2, at full charge, the battery voltage is actually slightly greater than 12V, depending on load current. As the
battery becomes depleted, its voltage drops to a value below 12V. In order to provide the regulated input voltage required
by the small board computer and user accessories modules, a DC-DC regulator must therefore be employed. For those
sources requiring a regulated 5V rail, a simple Buck DC-DC regulator can be used. The Buck regulator will take 12V in
from the battery and output a regulated 5V. Based on work done by team P07202, a TPS5420 DC-DC regulator was
chosen for this application. This regulator has many integrated features, including built-in power MOSFETS, and therefore
requires only an external power inductor and a few passive components to operate. The application circuit for this part is
shown in Figure E2.3.
24
DOC 01-302 REV 00
Design Survey
Figure E.2.10: TPS5420 Application Circuit (LTC3780 Datasheet)
For those subsystems requiring a regulated 12V rail from the 12V battery source, a Buck DC-DC regulator alone cannot
be used. This is because a buck regulator takes an input voltage VIN and provides a regulated output VOUT based on the
formula.
Vout D * Vin; where D 1
(1)
In equation (1), D refers to the duty cycle of the switching MOSFET’s. From the
TPS5420 datasheet, D can be a maximum of .87. This brings the maximum regulated output to approximately .87*12V or
10.4V. From equation (1), a Buck DC-DC regulator is limited to providing a regulated output below its input voltage.
Another type of DC-DC converter, called a Boost Regulator, is able to provide a regulated VOUT using the formula
Vout
1
* Vin; where D 1
1 D
(2)
Again, D is the duty cycle of the switching MOSFETs. Since D is once again limited to less then 1, a boost regulator
cannot provide a regulated output voltage equal to its input voltage. From equation (2), a Boost regulator is able to provide
a regulated output voltage greater then its input voltage.
From the preceding discussion, neither a Buck nor Boost regulator by themselves can be used to provide a regulated
12Vout from a 12V battery source. In researching this problem, two solutions emerged.
RP100 Solution
The first probable solution is to utilize as much of the completed work by team P07202, which implemented the TPS5420
DC-DC regulator for the required 5V output. In this manner, much of the ambiguity and risks of the power construction
can be minimized, as the regulator circuit constructed by the P07202 team has already undergone exhaustive simulation
and design review.
The solution involves breaking the regulation needed for the 12V OUT rail into two stages. The first stage utilizes the
existing TPS5420 DC-DC regulator for the required 5V output created by the P07202 team. The second stage
implements a Boost DC-DC regulator to boost the battery voltage up to 12V using the 5V regulated voltage from the
TPS5420. After researching Boost converters from the major power management suppliers, the chosen Boost DC-DC
regulator is the National Semiconductor LM3478 High Efficiency Low-Side N-Channel Controller. The application
schematic of the LM3478 is shown in Figure E2.4.
25
DOC 01-302 REV 00
Design Survey
Figure E2.11: LM3478 Application Schematic (LM3478 Datasheet)
The utilization of the LM3478 regulator enables a simple solution to be implemented to solve the power board problem,
although its efficiency level is at approximately 85% during current loads of approximately 1A, as shown in Figure E2.4a.
Figure E2.12a: LM3478 Efficiency (LM3478 Datasheet)
RP10 Solution
The second idea is to remove two of the 5V regulators and replace them with one power management IC which is able to
take 12Vin and output 12V, alternating between Buck and Boost modes as needed. After searching the major power
management IC suppliers, the LTC3780 from Linear Technology meets these needs. This device uses proprietary
technology to automatically switch between Buck, Boost, or Buck-Boost modes to provide a regulated output at, below, or
above the battery voltage level at efficiencies up to 98%. The application circuit for the LTC3780 is shown in figure E2.5.
26
DOC 01-302 REV 00
Design Survey
Figure E2.13: LTC3780 Application Schematic (LTC3780 Datasheet)
The ability to operate as a Buck, Boost, or Buck-Boost regulator gives this part extraordinary versatility – it will allow the
user to program the output voltage of this part anywhere from .8V up to 15V. Through the use of different external
MOSFETS, the maximum current draw of the device can be increased or decreased, depending on user needs. The high
efficiency of the converter is also a selling point – in a battery operated system like the robotic platform, higher efficiency
equates to longer runtime.
Simulation
RP100 Solution
The available method to simulate the operation of the LM3478 regulator is the National Semiconductor WEBENCH
Simulator Tool. The simulation program allows the simulation schematic, as seen in Figure EES1a, to be constructed and
its operation to supply the required 12VOUT with 2A from the 5VIN to be verified.
Figure E2.6: WEBENCH Simulation Schematic, LM3478
27
DOC 01-302 REV 00
Design Survey
Simulation of the LM3478 application schematic began with the startup of the either the RP100 or RP10 platform, with a
minimum VIN of 0V, VINmax of 5.1V, a trise of 2ms, and a load of 6Ω to simulate worst case scenario load in which 2A is
actually needed at the output.. All the passive components seen on the simulation schematic were chosen by National
Semiconductor, and only the input voltage and its range of values as well as the required output voltage of 12V OUT were
taken as “inputs” to the calculation of the passive component values. As seen in Figure E2.7, the LM3478 does not suffer
from startup current spikes, although its performance does degrade when the worst case scenario of 2A is required at the
load. The voltage has a smooth startup, also reaching its required value of 12V OUT after 5ms. During worst case startup,
the LM3478 is able to achieve a Vmax of 12.56V, which reveals its limitation of fluctuating within +/-5% during extreme
loads. The same range of fluctuation exists for the current output during extreme loads.
Figure E2.7: LM3478 Startup
In the unlikely event that the input voltage dips slightly below the 5V level to 4.9V, the LM3478 will be able to keep the
output voltage at slightly above 11.8V, while VIN fluctuations up to 5.1V will yield an LM3478 output voltage of 12.5V.
During these VIN fluctuations however, the current supply at the output, during a worst case load, will be at exactly 2A.
This was observed in the transient input simulation of the LM3478 application circuit. The simulation is seen in Figure
EE2.8.
Figure E2.8: LM3478 Transient Input Simulation
28
DOC 01-302 REV 00
Design Survey
In the event that the load current shifts or fluctuates between two values, such as 1.5A and 2A, the LM3478 is able to
keep the voltages stabilized between an extreme VOUT,min of 11.7V and a VOUT,max of 12.58V. The current values, however,
are able to be kept at the constant required values of the load. This transient load simulation is seen in Figure EE2.9.
Figure E2.9: LM3478 Transient Load Simulation
During steady state operation, without the worst case scenario of a current load equivalent to 2A, the LM3478 operation is
stable, as seen in Figure EES1e. The VIN value has been set to 5V, which is the expected output value of the TPS5420
DC-DC regulator while the output current has been set to 1A, which is an approximate load current of a random sensor.
During steady state operation, the output load current value is maintained at exactly the required current value, while the
output voltage is maintained within the +/- 1% range.
Figure E2.9: LM3478 Steady State Simulation
29
DOC 01-302 REV 00
Design Survey
RP10 Solution
Linear Technologies also provides a way to simulate operation of their ICs. To simulate the LTC3780, they provide a
version of SPICE they call SWCad III. Using this simulation program, and the schematic shown in figure 2.10, the part
was simulated to verify it would meet our regulation needs.
During simulation, the input voltage was varied between 13V (fully charged battery) to 9V (depleted battery). The output
voltage for the part was set at 12V using resistors R7 and R8. A 5.5Ω resistive load was also placed on the device to
simulate a worst case load of ~2A. All other components were picked based on Linear Technology’s application circuit.
The results of the simulations are shown in figure 2.11.
.
Figure EE2.10: SWCad III Simulation Schematic
Vin
Vout
Iout
Figure E2.11: LTC3780 Simulated 12Vout with 9V<Vin<13V, 6.5ms run time.
From the simulation, the device is able to provide a regulated 12V output despite the drop in input voltage from 13V to 9V.
VOUT initially rises to slightly higher then 12V during the device’s startup period (known as soft start), but after the start up
period, settles at 12V. From then on, the device maintains a regulated output voltage within +/-1% of 12V.
30
DOC 01-302 REV 00
Design Survey
To show the versatility of the LTC3780, VOUT was changed to .8V and then to 15V using R7 and R8. Both were then
simulated with the results shown in figures E2.12 and E2.13.
Vout
Iout
Vin
Figure E2.12: LTC3780 Simulated 15Vout with 9V<Vin<13V, 6.5ms run time.
Vin
Iout
Vout
Figure E2.13: LTC3780 Simulated .8Vout with 9V<Vin<13V, 6.5ms run time.
As was with the case with the 12V output, the output voltage settles on the programmed value after the startup sequence
and remains to within +/-1% despite a change in input voltage from 13V to 9V.
To assist in part selection and to asses the performance of the regulator, the output ripple voltage across the output
capacitor, the inductor ripple current through the inductor and the peak current load through the external MOSFETs was
measured. This simulation was performed with a VIN of 12V, VOUT of 12V, and a constant load of ~2A.
31
DOC 01-302 REV 00
Design Survey
Vout
IdMos
IL
Figure E2.14: LTC3780 output capacitor ripple voltage, Inductor ripple current
As shown in figure E2.14, the output voltage ripple was found to be to be ~10mV, indicating that an output capacitor of
390uF with an ESR of ~50mΩ would be sufficient for proper regulator operation. The ripple current through the inductor
was measured to be ~1.2A with a maximum current level of ~3A. Based on this data, an inductor of 4.7uH with a current
rating of at least 3.5A can be used. The maximum current load through the MOSFETs was ~7A, indicating a power
MOSFET with a current rating of 10A or greater could be used for all four external MOSFETs.
Finally, efficiency of the overall design was considered. Taken from the part’s datasheet, figure 2.11 shows estimated
efficiency with 12Vin, 12Vout.
Figure E2.15: LTC3780 Efficiency, 12Vin/12Vout.
From figure 2.11, the LTC3780 operates at efficiencies >90% at load currents greater then 200mA, which will be the
typical operation conditions of the power supply.
32
DOC 01-302 REV 00
Design Survey
Bill of Materials
Based on the platform power requirements presented in table 2.1, the power distribution board on the RP100 and RP10
will have the following regulated outputs: two 5V rails with a maximum continuous current draw of 2A and two 12V rails,
again with a maximum continuous current draw of 2A. One set of the 5V/12V rails will be used to power platform
accessories; the other set will provide power to the small board computer. A block diagram of the power distribution board
is shown in figure E2.16.
Figure E216: Power Distribution Board – Block diagram
Based on this configuration, a preliminary BOM is shown in Figure E2.17 for the RP100 Solution and in Figure E2.18 for
the RP10 Solution.
Figure E2.17: Power Distribution Board RP100 - Preliminary Schematic.
33
DOC 01-302 REV 00
Design Survey
Figure E2.18: Power Distribution Board RP10 - Preliminary Schematic.
With the RP100 solution, the estimated BOM price is ~$75 for one power distribution board. Using the RP10 solution, the
estimated parts cost for one power distribution board is ~$65. Shipping costs are estimated to add an additional $20 for
both. This brings the cost of one power distribution board to ~$95 using the RP100 solution and ~$85 using the RP10
solution. Additional funds will be required to have the printed circuit board manufactured. The estimated price for this,
based on quotes from PCB Express, is approximately $250 for 5 boards.
Safety
Because the power supply will be connected to the main battery, precautions must be taken so the end user is not
exposed to electrical shock. The power supply will also provide power to critical subsystems, and therefore must be robust
and fully tested. It should also protect downstream electronics during an over current or over voltage fault. The power
board as well as the enclosure it is to be placed in must be characterized so that it does not cause the power board to
overheat.
To protect the user from electrical shock, the power board will be placed in a protective case. The enclosure will be
electrically isolated from the power board and will have external connectors mounted to its end caps. These will allow the
user to plug in the battery and external modules into the power board without having to open the case.
To make sure the power board will not overheat in its enclosure, the power output of the board can be estimated, and
then an enclosure picked accordingly. From table 2.1, the total amount of power required by the small board computer
and user accessories modules is ~50W. Assuming a worst cast efficiency of 80%, the power board will dissipate ~65W.
Using this number, a fanless metal enclosure will be able to dissipate enough heat to prevent the power board from
overheating. Actual hardware will have to be characterized to verify these results.
Over current and over voltage protection will be handled by the DC-DC regulators.
TPS5420 Safety Features:
The TPS5420 Buck regulator uses the voltage drop across the upper MOSFET caused by the MOSFET’s Rdson to
measure the current draw of the load. When the measured voltage drop exceeds a preset limit, it turns the upper
MOSFET off for a cycle, preventing damage to components downstream. Over voltage monitors the voltage at the
TPS5420’s sense pin – if it rises to 115% of its nominal value, the upper MOSFET is turned off. For both over current and
over voltage protection schemes, regular operation resumes when the sensed voltage and current are within operating
range.
34
DOC 01-302 REV 00
Design Survey
LM3478 Safety Features
The LM3478 has its own internal safety features such as thermal protection, short-circuit protection, and over-voltage
protection. To avoid current surges during the start up operation of the platform, the LM3478 utilizes its internal soft start,
and its current mode control scheme enables a “cycle by cycle” current limit.
LTC3780 Safety Features
The LTC3780 also employs over current and over voltage protection. Instead of monitoring the voltage drop across the
upper MOSFETs, the LTC3780 throttles the current if a transient load (OC fault) causes the output voltage to drop to 70%
of the nominal value. In an over voltage situation, switches B and D are kept on till the over voltage is over or the
maximum negative current point is reached.
Risk Assessment
All passive and non-passive components on power design have a 1 business day lead time, and therefore can be ordered
anytime. It is unclear as to whether or not the accessibility status of such components will remain constant.
Figure E2.19: Power
Distribution Board RP10 - Preliminary Schematic.
35
DOC 01-302 REV 00
Design Survey
Testing Procedure
1) Initial Inspection
a. Verify parts are correctly placed and attached to board
2) Power up Buck Regulators
3) Verify correct output voltage
a. Limit current using power supply to ~100mA
b. Measure output voltage with multimeter
c. Measure ripple voltage with oscilloscope
4) Attach load
a. Use resistive load to slowly ramp up output current to maximum operating current
b. Monitor output voltage
c. Monitor component temperatures
5) Power up Buck Boost Regulators
6) Verify correct output voltage
a. Limit current using power supply to ~100mA
b. Measure output voltage with multimeter
c. Measure ripple voltage with oscilloscope
7) Attach load
a. Use resistive load to slowly ramp up output current to maximum operating current.
b. Monitor output voltage
c. Monitor component temperature
8) Power up all four regulators
9) Verify correct output voltage
a. Check output voltage using multimeter
b. Measure output voltage ripple using oscilloscope
10) Attach load
a. Attach resistive load to each converter; slowly ramp up to maximum operating current
b. Monitor output voltage
c. Monitor component temperature
11) Test over current capabilities of each converter
a. Artificially create short circuit condition for each regulator
i. Verify Regulator controls OC fault.
ii. Remove OC condition, verify correct operation resumes
12) Mount board in power box
a. Attach fully charged control battery
13) Verify correct output voltage at terminals
a. Measure input voltage at terminals of battery using multimeter
b. Measure output voltage with multimeter for each regulator
c. Measure output voltage ripple with oscilloscope for each regulator
14) Attach load
a. Attach resistive to generate 2A load on each converter
i. Monitor temperature within box using thermocouple(s) for 1 hour. If internal temperature exceeds
65ºC, turn off system and install cooling system
b. Measure battery voltage
i. Verify output voltage remains within regulation for all four regulators.
36
DOC 01-302 REV 00
Design Survey
3) Communications & User Interface
Overview
After carefully reviewing the types of interface, the decision on choosing serial (RS232) communication interface was
based on ease of implement and software modularity. Even though Ethernet and USB connections are also available
on the single board computer (SBC), most software and micro controllers today still use serial protocols to
communication with their outside world. This would provide software and hardware modularity for future projects.
Wireless Ethernet has also been explored and looks initially feasible, but since a wireless track is coming later, this
method will probably not be implemented in this track. The robotic platform (P07205) communication and software
subsystem will consist of two major components; the user interface software and SBC software.
1. User interface software will consist of a GUI that makes controlling the robot easy by using the keyboard or
mouse. It will also include a coordinate input system. The GUI will translate the inputs from the user to
commands that the SBC can understand and send it via RS232 connection to the SBC. The available features of
the user interface is listed in Table E3.1.
User interface Software Features
Provide easy to use navigation buttons
Provide easy to use coordinate input system
Ability to store input coordinates into an array
Able to generate the following commands to SBC
1. ‘KILL’
2. turn right
3. turn left
4. forward
5. reverse
6. stop
7. go to coordinate (x, y)
8. calibrate to coordinate (0,0)
Table E3.1: User interface software features
1
2
3
4
Needs
3.1
3.2
3.2
1.1,
1.7,
3.1
2. SBC software will translate the signal received into motor control subsystem (P07302) language commands. It
then sends those commands to the motor controller via ISA bus. The functionality of the SBC software is listed in
Table E3.2.
1
2
3
SBC software functionality
Ability to automatically send ‘KILL’ command to motor controller if
disconnected from laptop
Translate commands from laptop into motor controller commands
Ability to acquire commands and data sent and received by the
subsystems and display them on the laptop screen
Table E3.2: SBC software features
Needs
1.7
7.2, 4.3
7.2, 4.1
It is assumed that the reader of this document be familiar with the following concepts (click for web):
Stdin/Stdout
CAN 2.0
Shell Piping
HyperTerminal
RS-232
37
DOC 01-302 REV 00
Design Survey
Concept Design
User Interface Design
The user interface software design will be based on the block diagram in Figure E3.1. This communication
method frees the customer from complicated development hardware; even a basic stamp can be interfaced to the
platform without added circuitry.
Figure E3.1: Desktop PC side.
Table E3.3: Platform Command Set.
The user will be presented with a LabView based GUI (refer to Figure E3.2) that will take inputs and convert them
into commands (refer to Table E3.1) understood by the platform. The interface will likely have arrow buttons that
the user can click and hold with the mouse or the user can use the arrow keys on the keyboard. When the user
releases either the mouse button or the arrow key, the GUI will send a STOP command which will end the current
action. If the user wishes to send coordinate data to the platform, a table will be presented via the GUI for the
user to fill in. The GUI will then issue the COORD command followed by the encoded coordinate data to the
platform. Encoding will be determined when the coordinate date types are defined; this will be kept brutally
simple.
38
DOC 01-302 REV 00
Design Survey
Figure E3.2: PC GUI initial concept.
SBC Software Design
On the platform side, the software will be listening for commands to come in via the serial comm. port, and then
determine how to best meet the demands of the user. Proper motor control commands will be issued. The
platform software will most likely be written in C.
Figure E3.3 RP10 Platform side.
Analysis and Testing
PC User GUI
Initial setup:
Using a NULL modem cable, connect COM1 to COM2 on PC
Open HyperTerminal program and listen on COM2
Navigation
1. Click Left Arrow and hold
2. Verify ‘LEFT’ appears in the HyperTerminal window
3. Release button
4. Verify ‘STOP’ appears in the HyperTerminal window
5. Repeat for all directions
39
DOC 01-302 REV 00
Design Survey
Emergency Kill
1. Press the Kill control or Space Bar
2. Verify ‘KILL’ appears in the HyperTerminal window
Delay Start
1. Press Start button
2. Verify ‘DSTART’ appears in the HyperTerminal window
Coordinate Input
1. Enter coordinate data in the table
2. Press Send button
3. Verify ‘COORD XX XX XX XX XX’ appears with your data
Platform Software
Start the platform software
1. Enter ‘FORWARD’
2. Verify correct motor control command appears
3. Repeat for all commands in table E1.1
PC GUI to Platform Software Communication
1.
2.
3.
4.
5.
Connect COM1 on PC to COM1 on RP10 SBC
Start GUI on PC
Start platform software on RP100/RP10
Create PIPE from /dev/ttyS to STDIN of platform software
Work through the commands in table E3.3 and verify correct motor commands output from platform software on
STDOUT
Platform Software to Motor Module
1.
2.
3.
4.
Connect motor modules to RP10
Start platform software
Create PIPE from STDOUT of platform software to /dev/ttyS
Work through the commands in table E3.3 and verify correct motor actions
Software stress analysis
1. Software stress analysis must be performed to prevent missing commands to SBC
2. Send ‘KILL’ command at 10 command/sec continuously (it is assumed that the user can not press more than 10
keys/sec)
3. Verify that all commands have been register by the SBC
40
DOC 01-302 REV 00
Design Survey
Calculations
Maximum Commands per seconds at 115200 b/S baud
Where n is the number of characters in the command, Y is the number of commands per second the user may
issue (best case).
8bits
X bits
(n 6)bytes
command
1Byte
115200 bits
sec ond Y commands
sec ond
bits
X
command
For longest command ‘REVERSE’
Y = 1107 commands per second
This is far more than a user could physically issue.
Cost
The only part needed to buy is the RS-232 to CAN protocol bridge. This is a COTS item and is available. This is only
needed if the motor control team does not provide hardware but this is a likely scenario.
Risk Assessment
Risk
ID
1
2
3
4
5
Description of Risk Probability Impact Importanc Classification Mitigation Strategy
(0 - 1)
(low, med,
e
high)
(1-4)
Interfacing with data
Support/ integration
communication protocol
0.4
high
4
Technical
circuitry
Purchase of compatible
parts
Non working motor
Purchase RS232 to
controller unit
0.3
High
4
Technical
CAN bridge
Attempt to fix the motor
controller
SBC development lead
time
0.1
High
4
Time
Obtain a SBC ASAP
Delete sensor
Non working DAQ unit
0.3
Med
2
Technical
subsystem
Purchase Basic Stamp
homework board
Missing or delayed
Safety/softwar Thoroughly perform
commands
0.1
High
4
e
software stress analysis
Table E3.4: Possible subsystem risks
If the motor control team P07302 is unsuccessful, a COTS RS-232 to CAN 2.0 converter will be used in its place.
41
DOC 01-302 REV 00
Design Survey
Figure E1.3 Platform side alternative without P07302 Contribution.
Safety
The safety aspects to address here are a timely method of stopping the robot in the event of an emergency. There are
two main emergency events: communications severed and imminent collision while connected. Therefore the
communication software will be hierarchal in nature which will allow the KILL command to dominate the other commands.
Also, the platform software will note the lack of a PING command from the PC and this will mark a communications error;
the robot will stop.
Contingency Planning
The contingency plan has been interleaved with the main document text as it is expected that the platform will be
presented with the worst case scenario of having no motor control support. This is handled by using the COTS RS-232 to
CAN protocol bridge as specified. If the motor modules cannot speak CAN properly, they will be asked to implement an
RS-232 link instead which is able to be run over the same cabling. This is a likely scenario as well.
42
DOC 01-302 REV 00
Design Survey
4) Communications and Hardware
Overview
This section will examine the software and coordinate storage concepts for the 10Kg and 100 Kg robotic platform.
Flowcharts and pseudo code will be presented which outlines the flow of the software to be developed. When finished,
this software will run on the small board computer located on the robotic platform. The software will have two modes, one
which requires user inputs to steer the platform, the other which uses downloaded coordinates to autonomously navigate
to predefined coordinates. Autonomous navigation will be basic in this first implementation; the platform will not be
programmed to avoid obstacles or carry out path finding. These more advanced features will be left to later iterations of
the platform code.
Flowcharts
From Move()
Collect_Data()
NO
Remote PC
Connected?
Check_Inputs()
Check_Inputs()
Key_Pressed()
Check all inputs such as
Power, Motor Modules,..etc.
Get_Room_Size()
(X,Y)
Collect_Data()
THIS PROCESS WILL
ALSO ANALYZE THE
DATA, CONVERTING THE
USERS DATA INTO
MAGNITUDE AND PHASE
Figure E.4.14: Main()
43
DOC 01-302 REV 00
Design Survey
BAD
Verify_Input()
GOOD
targetArray()
(X,Y)
NO
DONE?
For Loop (x = 0 to sizeof(targetArray())-1)
targetArray(x)
Get Coordinates
Get Coordinates
targetArray(x+1)
Find Magnitude
KeyPressed()
targetStack()
Laptop
unhooked?
NO
YES
Find Phase
Wait()
Move()
Figure E.4.15: Data Collection
44
DOC 01-302 REV 00
Design Survey
YES
Done?
targetStack()
NO
DATA
Data or ASCII
Value?
ASCII
Left Arrow
Key?
NEXT TARGET
Set_Angle()
YES
Move_Robot()
At target?
NO
NO
Up Arrow Key?
YES
Set_Angle()
Move_Robot()
YES
Set_Angle()
Move_Robot()
YES
Set_Angle()
Move_Robot()
Set_Angle()
NO
Right Arrow
Key?
Set_Acceleration()
NO
Down Arrow
Key?
Move_Robot()
NO
Space Bar
Key?
Object?
NO
YES
YES
Kill()
Kill()
NO
NO
‘A’ Key?
At target?
YES
Set_Acceleration()
Move_Robot()
YES
Set_Acceleration()
Move_Robot()
Wait()
NO
YES
Wait()
‘D’ Key?
Figure E.4.16: Move
Analysis Summary
The overall program for this robot in theory should be fairly simple, as is shown in the flowcharts above.
45
DOC 01-302 REV 00
Design Survey
Data Collection and Analysis
The function of the program is to simply collects grid coordinates from the user and then converts those points to phase
and magnitude. As it is collecting the points, the loop will only end if and only if it reaches back to its starting point.
However, this can be seen as a logic error if the robot had to navigate in an eight-shaped figurine. The way this can be
fixed would be use an erroneous such as the string “end” or “quit.” Those are just simple methods to “fix” this logical
error; however, it will not be fixed until the need is aroused or requested.
Keypress()
Again, this program is only activated if there is a computer tethered to the laptop and the
robot is not looking for any grid coordinates to accept. With that in mind the robot will only move when certain keys are
pressed. Those keys are the directional keys (left, right, up, and down). If the left key is pressed, the robot will begin to
turn left and will not straighten out until the user hits a different key or lets go of the current key. It is important to realize
that the robot will move in multiple circles as long as does. There should not be any theoretical problems.
Inputs()
All that this function does is simply determine whether the laptop is tethered to a PC. Once that is determined the robot
can just call the functions that it will be needing. For example, it may to call the Data Collection and Analysis if the laptop
is tethered to the
robot.
Pseudo-code of Data Collection (MATLab)
%get grid size
gridSize = input('Grid size:');
%get starting point
xStart = input('X starting point:');
yStart = input('Y starting point:');
%Verify()
xCoord = xStart-1;
yCoord = yStart-1;
index = 0;
tartget(1,:) = [xStart yStart];
while (xCoord ~= xStart) || (yCoord ~= yStart)
xCoord = input('Input x-coordinate: ');
yCoord = input('Input y-coordinate: ');
index = index + 1;
target(index,:) = [xCoord yCoord];
end
%convert array to magnitude & phase queu
for i=1:index-1
x1 = target(i,1);
y1 = target(i,2);
x2 = target(i+1,1);
y2 = target(i+1,2);
magnitude = round(sqrt((x2-x1)^2 + (y2-y1)^2));
targetQ(i,:) = [magnitude phase];
end
46
DOC 01-302 REV 00
Design Survey
Risk Assessment
47
DOC 01-302 REV 00
Design Survey
5) Accessories
Ambient light sensor Overview
One of the requirements of both the RP10 and RP100 platforms are “cool factor” effects, which are essentially additional
non-required functions that simply make the robot “cooler.” One way to add a cool factor effect to the RP10 and RP100
robotic platforms is the addition of ambient light sensing, in which high powered LED’s can be made to illuminate the
platform under low light conditions. The ambient light sensor “cool effect” will be implemented on the two platforms with
the use of donated Intersil ISL29000 ambient light sensor reference boards. The device operates with an input voltage of
5V and outputs a current in the mA range based on the amount of sensed ambient light (bright light conditions result in
higher output current). In addition to adding a cool factor to the robot, the application of the Ambient Light Sensor will
showcase the capabilities of both robotic platforms to easily accept external sensors. A functional diagram of the ambient
light sensor is shown in Figure E.5.1.
Figure E5.1: Ambient Light Sensor Setup
Design
In figure E.5.1, the PMOS at the end of the LED string will be operated in the linear region, serving as a resistive switch.
This will control the current though the LEDs, thereby adjusting their brightness. The voltage drop across resistor R out
creates the gate voltage needed to drive the PMOS; the higher the Iout from the ambient light sensor, the higher the gate
voltage. Since Iout is proportional to ambient light, a PMOS device was chosen so that in low light levels, the LEDs would
turn on. Conversely, in higher light levels, the LEDs switch off. The point at which the LEDs turn on can be adjusted by
selecting different values of Rout.
The RC filter shown in figure E5.1 was added to filter out any 60Hz noise caused by the switching of the overhead
incandescent lights. The circuit shown in Figure E5.1 was implemented on a breadboard for testing; the effects of the
60Hz noise and that of selecting different cutoff frequencies f 0 are shown in figures E5.2, E5.3 and E5.4.
48
DOC 01-302 REV 00
Design Survey
Figure E5.2: Ambient Light Sensor 60Hz Noise, No filter
Figure E5.3: Ambient Light Sensor 60Hz Noise, f0=80Hz
Figure E5.4: Ambient Light Sensor 60Hz Noise, f0=4z
From figure E.5.2, E.5.3 and E.5.4, the effects of the RC filter are apparent. Lower cutoff frequencies significantly reduce
the amount of noise seen in the output. Filtering of the 60Hz noise from the output is necessary to prevent the LEDs from
flickering during turn on. The RC filter can also be used at a time constant, delaying the turn on of the LEDs, preventing
them from turning on and off with passing shadows. When implemented on the platform, the ambient light sensor can be
49
DOC 01-302 REV 00
Design Survey
used to light the motor module towers. Conversely, the light sensor can also be used to illuminate any clear plastic parts,
making them glow.
Sensor Concept Design Overview
Proximity Sensors are incorporated into the design of the robotic platform. The sensors will assist in detecting
obstacles and pedestrians. The addition of sensors will increase the robot’s intelligence, and more importantly, it
contributes to the overall safety factor. Sensors available from the RIT robotics lab were the only sensors put into
consideration due to limited budge and the level of importance compared to other subsystems (refer to Figure E5.1).
IR and ultrasonic proximity sensors were both analyzed for accuracy, feasibility and ease of implementation. All
connection from the sensor will be connected to the DAQ, therefore the addition of sensor is only feasible if the DAQ
unit is function properly. Mechanical mounting brackets for the sensor were also investigated.
Sensor(s) Features
1
Detect obstacles within 2 meters
3
4
SBC should send ‘stop’ command if obstacle is within 0.4m
Sensor(s) should have robust mechanical protection
Table E5.1: User interface software features
RP100
Needs
1.4,
1.5
1.4
1.6
(a) Sharp GP2D12 IR sensor
(b) Parallax Ultrasonic Sensor (#28015)
Figure E5.5: 2 type of sensor considered
By comparing the specification and data output of the two sensors, the Parallax ultrasonic sensor seem more feasible
and easier to implement. The output signal is purely digital on the ultrasonic making it easy to incorporate into a
digital platform. Another reason the ultrasonic sensor was choosing is that it has a higher detecting range. The
important specifications are listed in Table E5.2.
Sharp GP2D12
Parallax 28015
Voltage requirement 5V
5V
average current
33mA
23mA
power consumption
165mW
115mW
range
10cm-80cm
2cm-3m
price
$16
$30
data output type
analog (non linear relation) TTL pulse
Sampling frequency 22.2Hz
30Hz
Table E5.2: Sensors Specifications Comparison
50
DOC 01-302 REV 00
Design Survey
Design and Analysis:
Software interface requirements:
Trigger pulse (5us)
Sensor data line
DAQ
Digital input
DAQ software
To SBC
(via ISA)
Figure E5.6: communication interface between ultrasonic sensor and DAQ
The sensor detects objects by emitting a short ultrasonic burst and then "listening" for the echo. Under control of a host
microcontroller (trigger pulse), the sensor emits a short 40 kHz (ultrasonic) burst. This burst travels through the air at
about 1130 feet per second, hits an object and then bounces back to the sensor. The sensor provides an output pulse to
the host that will terminate when the echo is detected; hence the width of this pulse corresponds to the distance to the
target.
Figure E5.7: Timing diagram of signal at sensor data line
Simulations were performed using a signal generator and an oscilloscope to test the accuracy and timing. The signal
generator was used to emulate the signal that would come out of a microprocessor and the response of the sensor was
measured using the oscilloscope.
51
DOC 01-302 REV 00
Design Survey
sampling Freq
(Hz)
30Hz
30Hz
30Hz
30Hz
30Hz
object distance
(m)
0.3
0.6
0.9
1.4
2.0
measure pulse width
(us)
780
1760
2420
3920
5720
expected pulse width
(us)
871
1742
2613
4065
5807
Error
(%)
10.5%
1.0%
7.4%
3.6%
1.5%
Average
4.8%
Table E5.3: Ultrasonic Simulation Results (Refer to Figure E.5.6)
Figure E5.8: Sensor simulation data output results
52
DOC 01-302 REV 00
Design Survey
The sensors could be mounted anywhere on the robot with the mounting bracket shown in Figure E5.7. The mounting
bracket can also be mounted on most servos. The PC104 stack will provide easy excess to DAQ I/O connections (refer to
wiring subsystem).
Figure E5.9: Sensor mounting bracket
Bill of Materials
vendor
parallax.com
acroname.com/
part#
28015
R208
quantity
unit price
shipping Total price
2
$29.95
$10.00
$60.00
2
$4.95
$9.00
$20.00
Table E5.4: Bill of material for sensor subsystem
discription
ultrasonic sensors
sensor mounting brackets
Risk Assessment
Risk
ID
Description of Risk Probabili Impact Importan Classificatio
ty
(low, med,
ce
n
(0 - 1)
high)
(1-4)
1
2
Trigger pulse too short
Non working DAQ unit
0.1
0.3
Med
Med
3
2
Technical
Technical
3
Addition of sensor not
within budget
constraints
Object too close to be
detected
0.2
Med
2
Budget
4
0.5
High
4
Safety
Table E5.5: Possible subsystem risks
Mitigation Strategy
Decrease sampling
frequency
Delete sensor subsystem
Purchase Basic Stamp
development board
Use cheaper IR sensors
Also implement impact
sensor
53
DOC 01-302 REV 00
Design Survey
Standards Directory
Federal
Drafting
ASME Y14.1
Decimal Inch Drawing Sheet Size and Format
ASME Y14.1M
Metric Drawing Sheet Size and Format
ASME Y14.2M
Line Conventions and Lettering
ASME Y14.5M
Dimensioning and Tolerancing
ASME Y14.5.1M
Mathematical Definition of Dimensioning and Tolerancing Principles
ASME Y14.6
Screw Thread Representation
ASME Y14.24
Types and Applications of Engineering Drawings-Revision of ASME Y14.24M-1989
ASME Y14.35M
Revision of Engineering Drawings and Associated Documents
ASME Y14.38
Abbreviations and Acronyms-Revision and Redesignation of ASME Y1.1-1989
ASME Y14.100
Engineering Drawing Practices
ASME Y14 SERIES
Drafting Manual Series
DRM
Drawing Requirements Manual
21
DOC 01-302 REV 00
Design Survey
Electrical Diagrams
ANSI Y32.9-1972 (Reaff 1989), American National Standard Graphic Symbols for Electrical Wiring and Layout
Diagrams Used in Architecture and Building Construction.
ANSI 260.1-1993, American National Standard Letter Symbols for Units of Measurement (SI Units, Customary
Inch-Pound Units, and Certain Other Units).
ANSI 260.3-1993, American National Standard for Mathematical Signs and Symbols for Use in Physical
Sciences and Technology
ANSI 260.4-1996, American National Standard for Letter Symbols and Abbreviations for Quantities Used in
Acoustics
IEEE Std 91-1984 (Reaff 1994), IEEE Standard Graphic Symbols for Logic Functions.
IEEE Std 91a-1991 (Reaff 1994), Supplement to IEEE Standard Graphic Symbols for Logic Functions.
IEEE Std 267-1966, IEEE Recommended Practice for the Preparation and Use of Symbols.
IEEE Std 280-1985 (Reaff 1997), IEEE Standard Letter Symbols for Quantities Used in Electrical Science and
Electrical Engineering.
IEEE Std 315-1975 (Reaff 1993), IEEE Standard Graphic Symbols for Electrical and Electronics Diagrams
(Including Reference Designation Letters).
IEEE Std 945-1984 (Reaff 1997), IEEE Recommended Practice for Preferred Metric Units for Use in Electrical
and Electronics Science and Technology.
IEEE Std 991-1986 (Reaff 1994), IEEE Standard for Logic Circuit Diagrams.
IEEE/ASTM SI 10-1997, IEEE/ASTM Standard for the Use of the International System of Units (SI)—The
Modern Metric System.
Safety
Occupational Safety
29 C.F.R. § 1910.95, App F Powered Platforms, Manlifts, and Vehicle-Mounted Work Platforms
29 C.F.R. § 1910.66 Powered platforms for building maintenance
29 C.F.R. § 1910.67 Vehicle-mounted elevating and rotating work platforms
29 C.F.R. § 1910.68 Manlifts
29 C.F.R. § 1910.95 App G Occupational Health and Environmental Control
29 C.F.R. § 1910.95 Occupational noise exposure
20 C.F.R. § 416.967 Physical excretion requirements
22
DOC 01-302 REV 00
Design Survey
General Public Safety
47 C.F.R. § 1.1310 Radiofrequency radiation exposure limits
Equipment
29 C.F.R. § 1910.399 Custom-made Equipment
Fire Prevention
National Electrical Code 2005
Industrial Robots Safety
ANSI/RIA R15.06 – 1999 Industrial robots safety requirements
NY State Regulations
12 NYCRR 8-1.58
N.Y. Comp. Codes R. & Regs. tit. 12, § 8-1.58 Power Driven Machinery Wiring Specifications
Sources and Useful Contacts
Services available through the Wallace Library
Engineering Librarian
Excellent assistance when searching most engineering topics
Westlaw database
Searchable database of Federal and Regional laws
Compendex database
Searchable database for technical information regarding robot safety and compliance as
well as other robotics-related information
IEEE Standards Style Manual
Source for engineering communication rules focusing on electrical systems
Library Catalog
See the reference section for paper copies of the Code of Federal Regulations and New
York State Laws.
Certain Standards are available upon request thru the inter library borrowing method
US law
www.usa.gov
Provides a searchable database of the Code of Federeal Regulations with free access to all
documents
Keywords
Utility Robot
Robotic Safety
23
DOC 01-302 REV 00
Design Survey
Robotic Plarform
Heavy Lifting
Noise Exposure
Voltage Exposure
Wire Gauge
National Electrical Code
Safety Factor
“Safety Factor”
Motorized Platform
24
DOC 01-302 REV 00
Design Survey
Electronic Access Directory
For more information about this design or any other related projects, please visit:
http://edge.rit.edu
Click on
RP07205
RP07204
All documentation is posted in the SVN Directory of each team.
This is an Open Source project. Everyone is permitted to copy and distribute verbatim copies of this document.
2006 Rochester Institute of Technology
Mechanical Engineering Department
25