LN3
advertisement

ENGRD 241 Lecture Notes
Section 3: Systems of Equations
SYSTEMS OF EQUATIONS (C&C 4th PT 3 [Chs. 9-12])
[A] {x} = {c}
Systems of Equations (C&C 4th, PT 3.1, p. 217)
Determine x1,x2,x3,…,xn such that
f1(x1,x2,x3,…,xn) = 0
f2(x1,x2,x3,…,xn) = 0
fn(x1,x2,x3,…,xn) = 0
Linear Algebraic Equations
a11x1 + a12x2 + a13x3 + … + a1nxn = b1
a21x1 + a22x2 + a23x3 + … + a2nxn = b2
an1x1 + an2x2 + an3x3 + … + anxn = bn
where all aij's and bi's are constants.
In matrix form: (C& C 4th, PT3.2.1, p.220 and PT3.2.3, p. 226)
a11 a12 a13
a
21 a 22 a 23
a 31 a 32 a 33
a n1 a n 2 a n3
nxn
or simply
a1n
a 2n
a 3n
a nn
x1
b1
x
b
2
2
x 3 = b3
x n
b n
nx1
nx1
[A]{x} = {b}
Applications of Solutions of Linear Systems of Equations
• Steady-state reactor in Chemical Engineering (12.1)
• Static structural analysis
(12.2)
• Potentials and currents in electrical networks (12.3)
• Spring - mass models
(12.4)
• Solution of partial differential Equations
(29-32)
Heat and fluid flow
Pollutants in environment
Weather
Stress analysis [material science]
• Inverting matrices
• Multivariate Newton-Raphson for
nonlinear systems of equations
(9.6)
• Developing approximations:
Least squares
(17)
Spline functions
(18.6)
Statistics
page 3-1 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Categories of Solution Methods:
1. Direct
- Gaussian Elimination
- Gauss - Jordon
- LU Decomposition (Doolittle and Cholesky)
2. Iterative
- Jacobi Method
- Gauss - Seidel Method
- Conjugate Gradient Method
Outline of our studies and corresponding sections in C&C
Gaussian Elimination
Algorithm
9.2
Problems
9.3
Pivoting
9.4.2
Scaling
9.4.3
Operation Counts (flops)
9.2
LU Decomposition
10.1
Matrix inversion (Gauss-Jordan)
10.2
Banded Systems
11.1
Study of Linear Systems
Ill-conditioned systems of equations
9.3
Error Analysis, Matrix norms
10.3
Iterative solutions (Gauss-Seidel)
11.2
Examples
12
Naive Gaussian Elimination: (C& C 4th, 9.2, p. 238)
Solve [A]{x} = {c} for {x}, with [A] n x n and {x}, {c} Rn
Basic Approach:
1.Forward Elimination: Take multiples of rows away from subsequent
rows to zero out columns such that [A] is converted to [U]
2.Back Substitution: Beginning with [U], back-substitute to solve for the xi's
Details:
1. Forward Elimination (Row Manipulation)
a. Form augmented matrix [A|c]
a11 a12
a 21 a 22
a n1 a n2
a1n x1 b1
a11 a12
a 2n x 2 b 2 a 21 a 22
a n1 a n2
a nn x n b n
a1n b1
a 2n b 2
a nn b n
b. By elementary row manipulations, reduce [A | b] to [U | b']
where U is an upper triangular matrix:
DO i = 1, n-1
DO k = i+1, n
Row(k) = Row(k) - (aki/aii) * Row(i)
ENDDO
ENDDO
page 3-2 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Naive Gaussian Elimination (cont'd):
2. Back Substitution
Solve the upper triangular system [U]{x} = {c'}
u11
0
0
0
u12
u 22
0
u13
u 23
u 33
0
0
u1n
u1n
u 3n
u nn
x1 b1
x b
2 2
x 3 = b3
x n bn
xn = bn / u n n
DO i = n–1, 1, (–1)
bi xi =
n
u
j i 1
ij
xj
uii
ENDDO
Naive Gaussian Elimination: Example
Consider the system of equations
50 1 2
1 40 4
2 6 30
x1
1
x 2 = 2
x3
3
To 2 significant figures, the exact solution is:
x true
0.016
= 0.041
0.091
We will use 2 decimal digit arithmetic with rounding.
Start with the augmented matrix:
50 1 2
1
1 40 4
2
3
2 6 30
Multiply the first row by –1/50 and add to second
row.
Multiply the first row by –2/50 and add to third
row:
Multiply the second row by –6/40 and add to third
row:
50 1 2
0 40 4
0 6 30
1
2
3
50 1 2
0 40 4
0 0 29
1
2
2.7
page 3-3 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Naive Gaussian Elimination: Example (cont'd):
Now backsolve:
50 1 2
0 40 4
0 0 29
1
2
2.7
x3 =
2.7
= 0.093
29
(vs. 0.091, t = 2.2%)
x2 =
(2 4x 3 )
= 0.040
40
(vs. 0.041, t = 2.5%)
x1 =
(1 2x3 x 2 )
= 0.016
50
(vs. 0.016, t = 0%)
Consider an alternative solution interchanging rows:
2 6 30 3
50 1 2 1
1 40 4 2
After forward elimination, we obtain:
2
6
30
3
0 150 750 74
0
0
200 19
Now backsolve:
x3 = 0.095
x2 = 0.020
(vs. 0.091, t = 4.4%)
(vs. 0.041, t = 50%)
x1 = 0.000 (vs. 0.016, t = 100%)
Apparently, the order of the equations matters!
What happened ???
• When we used 50 x1 + 1 x2 + 2 x3 = 1 to solve for x1, there was little
change in other equations.
• When we used 2 x1 + 6 x2 + 30 x3 = 3 to solve for x1 it made BIG
changes in the other equations. Some coefficients for other
equations were lost!
This second equation has little to do with x1.
It has mainly to do with x3.
As a result we obtained LARGE numbers in the table, significant
roundoff error occurred and information was lost.
If scaling factors | aji / aii | are 1 then the impact of roundoff errors is
diminished.
page 3-4 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Naive Gaussian Elimination: Example (cont'd)
Effect of diagonal dominance:
As a first approximation roots are:
xi bi / aii
Consider the previous examples:
0.016
x true = 0.041
0.091
50 1 2
1 40 4
2 6 30
1
2
3
x1 1/50 =0.02
x 2 2/40 =0.05
x 3 3/30 =0.10
2 6 30
50 1 2
1 40 4
3
1
2
x1 3/2 = 1.50
x 2 1/1 = 1.00
x 3 2/4 = 0.50
Goals
1. Best accuracy (i.e. minimize error)
2. Parsimony (i.e. minimize effort)
Possible Problems:
A. A zero on diagonal term
B. Many floating point operations (flops) cause numerical precision
problems and propagation of errors.
C. System may be ill-conditioning, i.e. det[A] 0
D. No solution or an infinite # of solutions, i.e. det[A] = 0
Possible Remedies:
A. Carry more significant figures (double precision)
B. Pivot when the diagonal is close to zero.
C. Scaling to reduce round-off error.
PIVOTING (C&C 4th, 9.4.2, p. 250)
A. Row pivoting (Partial Pivoting) In any good routine; at each step i, find
maxk | aki | for k = i+1, i+2, ..., n
Move corresponding row to the pivot position .
(i) Avoids zero aii
(ii) Keeps numbers in table small
and minimizes round-off,
(ii) Uses an equation with large | aki | to find xi.
Maintains diagonal dominance.
Row pivoting does not affect the order of the variables.
Included in any good Gaussian Elimination routine.
page 3-5 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
PIVOTING (cont'd)
B. Column pivoting Reorder remaining variables xj; for j = i, . . . , n so get largest | aij |
Column pivoting changes the order of the unknowns, xi, and thus
leads to complexity in the algorithm. Not usually done.
C. Complete or Full pivoting
Performing both
How to fool pivoting example: one equation has very large coefficients.
Multiply third equation by 100. After pivoting will obtain:
200 600 3000 300
1
2
1
50
1
40
4
2
Forward elimination, yields:
200 600 3000
0 150 750
0
0
200
300
74
19
Backsolution yields:
x3 = 0.095
(vs. 0.091, t = 4.4%)
x2 = 0.020
(vs. 0.041, t = 50%)
x1 = 0.000
(vs. 0.016, t = 100%)
The order of the rows is still poor!!
SCALING (C&C 4th, 9.4.3, p. 252)
A. Express all equations in comparable units so all elements of [A]
are about the same size;
B. If that fails, and maxj |aij| varies widely across rows,
a ij
a ij
Replace each row by:
max j a ij
This makes the largest coefficient of each equation equal to 1 and
the largest element of [A] equal to +1 or -1.
NOTE: Routines generally do not scale automatically; scaling can cause
round-off error too!
SOLUTIONS:
• don't actually scale, but use imaginary scaling factors to determine
what pivoting is necessary.
• scale only by powers of 2: no roundoff or division required.
page 3-6 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
How to fool scaling:
A poor choice of units can undermine the value of scaling. Begin with our
original example.
50 1 2
1 40 4
2 6 30
1
2
3
If the units of x1 were expressed in µg instead of mg the matrix might
read:
50000 1 2 1
1000 40 4 2
2000 6 30 3
Scaling yields:
1 0.00002 0.00001 0.00001
0.04
0.004
0.002
1
1 0.003
0.015
0.0015
Which equation is used to determine x1???
Why bother to scale?
OPERATION COUNTING (C&C 4th, 9.2.1, p.242)
Number of multiplies and divides often determines the CPU time.
One floating point multiply/divide and associated adds/subtracts is called
a FLOP: FLoating point OPeration.
Some Useful Identities for counting FLOPS:
m
1)
cf (i) = c
i 1
m
3)
m
f(i)
2)
i=1
1= 1 + 1 +
+1=m
4)
i=1
m
5)
m
i=1
m
m
i 1
m
i=1
i=1
f (i) + g(i) = f(i) + g(i)
1 = m - k + 1
i=k
i= 1 + 2 + 3 + 4 +
+m=
i=1
6)
m
i 2 = 12 + 22 +
+ m2 =
m(m+1)
m2
=
+ O(m)
2
2
m(m+1)(2m+1)
m3
=
+ O(m 2 )
6
3
O(mn) means "terms of order mn and lower."
page 3-7 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Simple Examples of Operation Counting:
1. DO i = 1 to n
Y(i) = X(i)/i – 1
ENDDO
In each iteration X(i)/i – 1 represents 1 FLOP because it requires one
division & one subtraction.
The DO loop extends over i from 1 to n iterations:
n
1 n
FLOPS
i 1
2. DO i = 1 to n
Y(i) = X(i) X(i) + 1
DO j = i to n
Z(j) = [ Y(j) / X(i) ] Y(j) + X(i)
ENDDO
ENDDO
With nested loops, always start from the innermost loop.
[Y(j)/X(i)] * Y(j) + X(i) represents 2 FLOPS
n
n
ji
ji
2 = 21 = 2(n – i + 1) FLOPS
For the outer i-loop:
X(i)X(i) + 1 represents 1 FLOP
n
n
n
i 1
i 1
i 1
[1 2(n i 1)] = (3 + 2n) 1 2 i
= (3 + 2n)n –
2n (n 1)
2
= 3n + 2n2 – n2 – n
= n2 + 2n = n2 + O(n)
page 3-8 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Operation Counting for Gaussian Elimination
Forward Elimination:
DO k = 1 to n–1
DO i = k+1 to n
r = A(i,k)/A(k,k)
DO j = k+1 to n
A(i,j)=A(i,j) – r*A(k,j)
ENDDO
C(i) = C(i) – r*C(k)
ENDDO
ENDDO
Back Substitution:
X(n) = C(n)/A(n,n)
DO i = n–1 to 1 by –1
SUM = 0
DO j = i+1 to n
SUM = SUM + A(i,j)*X(j)
ENDDO
X(i) = [C(i) – SUM]/A(i,i)
ENDDO
Forward Elimination
n
Inner loop
=
1 = n – (k+1) + 1 = n – k
jk 1
n
Second loop =
[2 (n k)]
i k 1
= [(2 + n) – k] (n – k)
= (n2 + 2n) – 2(n + 1)k + k2
n 1
Outer loop
=
[(n 2 2n) 2(n 1)k k 2 ]
k 1
n 1
n 1
n 1
k 1
k 1
k 1
= (n2+2n) 1 – 2(n+1) k +
= (n2+2n)(n-1) – 2(n+1)
3
=
n
+ O(n2)
3
k2
(n 1)(n)
(n 1)( n )( 2n 1)
+
2
6
page 3-9 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Back Substitution
n
Inner Loop
1 = n – (i +1) + 1 = n – i
ji 1
n 1
Outer Loop
i 1
1 (n i) = (1+n)
n 1
i 1
n 1
1–
i
i 1
2
n
(n 1)n
= (1+n) (n–1) –
=
+ O(n)
2
2
Total flops = Forward Elimination + Back Substitution
=
n3/3 + O (n2)
n3/3 + O (n2)
+
n2/2 + O (n)
To convert (A,b) to (U,b') requires n3/3, plus terms of order n2 and
smaller, flops.
To back solve requires: 1 + 2 + 3 + 4 + . . . + n = n (n+1) / 2 flops;
Grand Total: the entire effort requires n3/3 + O(n2) flops altogether.
Gauss-Jordon Elimination (C&C 4th 9.7, p. 259)
Diagonalization by both forward and backward elimination in each
column.
a1n x1 b1
a11 a12 a13
a a
a 2n x 2 b 2
21 22 a 23
a 31 a 32 a 33
a 3n x 3 = b3
a n1 a n2 a n3
a nn x n b 4
perform both backward and forward elimination until:
x1 b1
0
1 0 0
0 1 0
x 2 b2
0
x 3 = b
3
0 0 1
0
1
0 0 0
x n bn
n3
+ 0 (n 2 )
Operation count:
2
n3
+ 0 (n 2 )
3
Gauss-Jordan is 50% slower than Gauss elimination.
Gauss Elimination only requires
page 3-10 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Gauss-Jordon Elimination, Example (two-digit arithmetic):
50 1 2 1
1 40 4 2
2 6 30 3
1 0.02 0.04 0.02
4
2
0 40
0
6
30
3
1 0 0.038 0.019
.1
0.05
0 40
0 0
29
2.7
=>
1 0 0
0 1 0
0 0 1
x1 = 0.015
(vs. 0.016, t = 6.3%)
x2 = 0.041
(vs. 0.041, t = 0%)
x3 = 0.093
(vs. 0.091, t = 2.2%)
0.015
0.041
0.093
Gauss-Jordan Matrix Inversion
The solution of: [A]{x} = {b} is:
{x} = [A]-1{b}
where [A]-1 is the inverse matrix of [A]
Consider:
[A] [A]-1 = [ I ]
1) Create the augmented matrix: [ A | I ]
2) Apply Gauss-Jordan elimination:
==> [ I | A-1 ]
Gauss-Jordan Matrix Inversion
(with 2 digit arithmetic):
50 1 2 1 0 0
[A | I] = 1 40 4 0 1 0
2 6 30 0 0 1
1 0.02 0.04 0.02 0 0
4
0.02 1 0
= 0 40
0
6
30 0.04 0 1
page 3-11 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-12 of 3-26
1 0 0.038
0.02
0.005 0
= 0 1 0.1 0.0005 0.025 0
0 0
28
0.037 0.15 1
1 0 0
0.02
0.00029 0.0014
0.026
0.0036
= 0 1 0 0.00037
0 0 1 0.0013 0.0054
0.036
MATRIX INVERSE [A-1]
CHECK:
[ A ] [ A ]-1 = [ I ]
50
2
2
1
40
6
2
4
30
0.020
-0.00037
-0.0013
-0.0029
0.026
-0.0054
-0.0014
-0.0036
0.036
0.997
0.000
0.001
0.13
1.016
0.012
0.002
0.001
1.056
[ A ]-1 { c } = { x }
0.020
-0.00037
-0.0013
-0.0029
0.026
-0.0054
-0.0014
-0.0036
0.036
1 0.015
2 0.033
3 0.099
Gaussian Elimination
x true
0.016
0.041
0.091
LU Decomposition (C&C 4th, 10.1, p. 264)
A practical, direct method for equation solving, especially when several
r.h.s.'s are needed and/or when all r.h.s.'s are not known at the start of the
problem.
Examples of applications:
• time stepping: A u t+1 = B u t + t
• several load cases: Axi = bi
• inversion: A-1
• iterative improvement
Don't compute A-1
Requires n3 flops to get A-1
Numerically unstable calculation
LU computations
Stores the calculations needed to repeat
'Gaussian' elimination on a new rhs c-vector
x
0.016
0.040
0.093
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-13 of 3-26
LU Decomposition (See C&C Figure 10.1)
[A] {x} = {b}
[U]
[L]
a) decomposition [A] ==> [L][U]
[L]{d}= {b}
b) forward substitution
[ L | b ] ==> { d }
[U]{x}={d}
c) backward substitution
{x}
Doolittle LU Decomposition (See C&C 4th, 10.1.2-3, p. 266)
U is just the upper triangular matrix from Gaussian elimination
[ A | b] [ U | b ]
[ L ] has one's on the diagonal (i.e., it is a "unit lower triangular
matrix" and therefore can be denoted [L1]), and elements below
diagonal are just the factors used to scale rows when doing Gaussian
elimination, e.g., i1 ai1 / a11 for i = 2, 3, …, n
a11 a12
a
21 a 22
A a 31 a 32
a n1 a n2
then
a13
a 23
a 33
a n3
[L1] {d} = {b}
a1n 1
a 2n 21
a 3n = 31
a nn n1
===>
0
1
32
0
0
1
n2
n3
[U] {x} = {d}
0
0
0
1
u11 u12
0 u
22
0
0
0
0
0
u1n
u 2n
u 3n
u nn
in which {d} is synonymous with {b'}
Basic Approach (C&C Figure 10.1):
Consider [A]{x} = {b}
a) Use Gauss-type "decomposition" of [A] into [L][U]
n3/3 flops
[A]{x} = {b} becomes [L][U]{x} = {b}
b) First solve [L]{d} = {b} for {d} by forward substitution n2/2 flops
c) Then solve [U]{x} = {d} for {x} by back substitution
LU Decomposition Variations
Doolittle
[L1][U]
General [A]
Crout
[L][U1]
General [A]
Cholesky
[L][L]T
PD Symmetic
u13
u 23
u 33
n2/2 flops
C&C 10.12
C&C 10.1.4
C&C 11.1.2
Cholesky works only for Positive Definite symmetric matrices
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Doolittle versus Crout:
Doolittle just stores Gaussian elimination factors where Crout uses a
different series of calculations, see C&C Section 10.1.4.
Both decompose [A] into [L] and [U] in n3/3 FLOPS
Different location of diagonal of 1's (see above)
Crout uses each element of [A] only once so the same array can be
used for [A] and [L\U1] saving computer memory! (The 1’s of [U1]
are not stored.)
Matrix Inversion (C&C 4th, 10.2, p. 273)
First Rule:
Don’t do it.
(numerically unstable calculation)
If you really must -1) Gaussian elimination: [A | I ] [U | B' ] A-1
2) Gauss-Jordan: [A | I ] [I | A-1]
Inversion will take n3 + O(n2) flops if one is careful about where zeros are
(taking advantage of the sparseness of the matrix).
3
4n
Naive applications (without optimization) take
+ O(n2) flops.
3
3
n
For example, LU decomposition takes
+ O(n2) flops.
3
Back solve twice with n unit vectors ei: 2 n (n2/2) = n3 flops.
3
Altogether:
3
n
4n
+ n3 =
+ O(n2) flops
3
3
page 3-14 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-15 of 3-26
FLOPS for Linear Algebraic Equations, [A]{x} = {b}:
Gauss elimination (1 r.h.s)
n3
+ O (n 2 )
3
Gauss-Jordan (1 r.h.s)
n3
+ O (n 2 )
2
LU decomposition
n3
+ O (n 2 )
3
Each new LU right-hand side
n2
Cholesky decomposition (symmetric A)
n3
+ O (n 2 )
6
Inversion (naive Gauss-Jordan)
4n 3
+ O (n 2 )
3
Inversion (optimal Gauss-Jordan)
Solution by Cramer's Rule
[50% more than Gauss. Elimin.]
n3 + O(n2)
n!
[Half the FLOPs of Gauss. Elimin.]
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-16 of 3-26
Errors in Solutions to Systems of Linear Equations (C&C 4th, 10.3, p. 277)
Objective: Solve [A]{x} = {b}
Problem: Round-off errors may accumulate and even be exaggerated by the solution procedure. Errors
are often exaggerated if the system is ill-conditioned.
Possible remedies to minimize this effect:
1. pivoting
2. work in double precision
3. transform problem into an equivalent system of linear equations by scaling or equilibrating
Ill-conditioning
• A system of equations is singular if det|A|= 0
• If a system of equations is nearly singular it is ill-conditioned.
Systems which are ill-conditioned are extremely sensitive to small changes in coefficients of [A] and
{b}. These systems are inherently sensitive to round-off errors.
Question: Can we develop a means for detecting these situations?
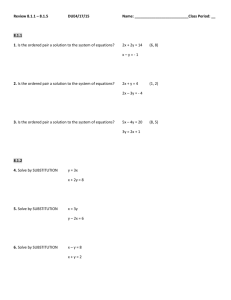
Consider the graphical interpretation for a 2-equation system:
a11 a12 x1 b1 (1)
a
21 a 22 x 2 b2 (2)
We can plot the two linear equations on a graph of x1 vs. x2.
x
a11x1+ a12x2 = b1
2
b2/a22
b2/a21
b1/a12
x
1
b1/a11
a21x1+ a22x2 = b2
x1
x1
x2
Uncertaint
y
in x2
x2
Uncertaint
y
in x2
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-17 of 3-26
Ways to detect ill-conditioning:
1. Calculate {x}; make a small change in [A] or {b} and determine effect on the new solution {x}.
2. After forward elimination examine diagonal of upper triangular matrix. if aii << ajj, i.e. there is a
relatively small value on the diagonal, then this may indicate ill-conditioning.
3. Compare {x}SINGLE with {x}DOUBLE
4. Estimate "condition number" for A.
Substituting the calculated {x} into [A]{x} and checking this against {b} will unfortunately not
always work! (See C&C Box 10.1)
Norms and the Condition Number
We need a quantitative measure of ill-conditioning.
This measure will then directly reflect the possible magnitude of round-off effects.
To do this we need to understand norms.
Norm: Scalar measure of the magnitude of a matrix or vector (how "big" a vector is – not to be
confused with the dimension of a matrix.)
Vector Norms (C&C 4th, 10.3.1, pp. 278-280)
Scaler measure of the magnitude of a vector.
Here are some vector norms for nx1 vectors {x} with typical elements xi. Each is in the general
1/ p
form of a p norm defined by the general relationship: x
n
p
xi
i1
p
n
1. Sum of the magnitudes:
2. Magnitude of largest element:
3. Length or Euclidean norm
x1
x
x
2
x
i
i 1
max x i
x
i
e
n
i 1
1/ 2
xi
2
Required Properties of vector norm:
1. x 0 and x
if and only if [x]=0
2. kx k x where k is any positive scalar
3. x y x y
Triangle Inequality
For the Euclidean vector norm we also have
4.
xy x
y
because the dot product or inner product property satisfies
x y x y cos x y .
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-18 of 3-26
Matrix Norms (C&C 4th, Box 10.2, p. 279)
Scaler measure of the magnitude of a matrix.
Matrix norms corresponding to the vector norms above are defined by the general relationship:
A p max
x p 1
Ax
p
A
1. Largest column sum:
1 max
j
2. Largest row sum:
x
3. Spectral norm:
max
i
n
i 1
a ij
n
a ij
j1
A 2 ( max )1/ 2
where µmax is the largest eigenvalue of [A]T[A].
If [A] is symmetric, (µmax)1/2 = max, the largest eigenvalue of [A].
Matrix Norms
For matrix norms to be useful we require that
0. || Ax || || A || ||x ||
General properties of any matrix norm:
1. || A || 0 and || A || = 0 iff [A] = 0
2. || k A || = k || A || where k is any positive scalar
3. || A + B || || A || + || B ||
"Triangle Inequality"
4. || A B || || A || || B ||
Why are norms important?
Norms permit us to express the accuracy of the solution {x} in terms of || x ||
Norms allow us to bound the magnitude of the product [A]{x} and the associated errors.
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-19 of 3-26
Digression: A Brief Introduction to the Eigenvalue Problem
For a square matrix [A], consider the vector {x} and scalar for which
[A]{x} = {x}
x is called an eigenvector and an eigenvalue of A. The problem of finding eigenvalues and
eigenvectors of a matrix A is important in scientific and engineering applications, e.g., vibration
problems, stability problems . . . See Chapra & Canale Chapter 27 for background and examples.
The above equation can be rewritten
( [A] – [I] ) {x} = 0.
indicating that the system ( [A] – [I] ) is singular. The characteristic equation
det ([A] – [I]) = 0,
yields n real or complex roots which are the eigenvalues i, and n real or complex eigenvectors {xi}. If
[A] is real and symmetric, the eigenvalues and eigenvectors are all real. In practice, one does not usually
use the determinant to solve the algebraic eigenvalue problem, and instead employs other algorithms
implemented in mathematical subroutine libraries.
Forward and Backward Error Analysis
Forward and backward error analysis can estimate the effect of truncation and roundoff errors on the
precision of a result. The two approaches are alternative views:
1. Forward (a priori) error analysis tries to trace the accumulation of error through each process of the
algorithm, comparing the calculated and exact values at every stage.
2. Backward (a posteriori) error analysis views the final solution as the exact solution to a perturbed
problem. One can consider how different the perturbed problem is from the original problem.
Here we use the condition number of a matrix [A] to specify the amount by which relative errors in [A]
and/or {b} due to input, truncation, and rounding can be amplified by the linear system in the
computation of {x}.
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Error Analysis for [A]{x} = {b} for errors in {b}
Suppose the coefficients {b} are not precisely represented.
What might be the effect on calculated {x+ x}?
Lemma: [A]{x} = {b} yields || A || || x || || b ||
b
A
1
x
or
A
x
b
Now an error in {b} yields a corresponding error in {x}:
[A ]{x + x} = {b + b}
[A]{x} + [A]{x} = {b} + {b}
Subtracting [A]{x} = {b} yields:
[A]{x} = {b} ––> {x} = [A]-1 {b}
Taking norms and using the lemma:
x
b
b
A A 1
x
b
b
Define the condition number as
= cond [A] = A1
A 1
If 1, or is small, the system is well-conditioned
If >> 1, the system is ill conditioned.
1 I A1A A1 A = Cond(A)
Error Analysis of [A]{x} = {b} for errors in [A] (C&C 4th, 10.3.2, p.280)
Coefficients in [A] not precisely represented.
What might be effect on calculated {x + x}?
[A + A ]{x + x} = {b}
[A]{x} + [A]{x} + [A]{x+x} = {b}
Subtracting [A]{x} = {b} yields:
[A]{x} = – [A]{x + x} or {x } = – [A]-1 [A] {x + x}
Taking norms and multiplying by || A || / || A || yields :
x
x x
A A 1
A
A
A
A
page 3-20 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-21 of 3-26
Estimate of Loss of Significance:
Consider the possible impact of errors [A] on the precision of {x}.
If
A
~ 10 p , then
A
that if
x
A
κ
implies
x x
A
x
~ 10s , then 10 s κ 10 p
x x
or, taking the log of both sides, one obtains:
s p log10()
• log10() is the loss in decimal precision, i.e., we start with p significant figures and end-up with s
significant figures. (This idea is expressed in words at bottom of p.280 of C & C)
• One does not necessarily need to find [A]-1 to estimate = cond[A]. Can use an estimate based
upon iteration of inverse matrix using LU decomposition.
• One does not necessarily need to find [A]-1 to estimate = cond[A]. For
example, if [A] is symmetric positive definite, = λmax/λmin and one can
bound λmax by any matrix norm and calculate λmin using the LU
decomposition of [A] and a method called “inverse vector iteration.”
• Programs such as MATLAB have built-in functions to calculate = cond[A]
or the reciprocal condition number 1/ (“cond” and “rcond”).
Iterative Solution Methods (C&C 4th, 11.2, p. 289)
Iterative Solution Methods
Impetus for Iterative Schemes:
1. may be more rapid if coefficient matrix is "sparse"
2. may be more economical w/ respect to memory
3. may also be applied to solve nonlinear systems
Disadvanges:
1. May not converge or may converge slowly
2. Not appropriate for all systems
Error bounds apply to solutions obtained by direct and iterative methods because they address the
specification of [A] and {c}.
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
Iterative Solution Methods
Basic Mechanics:
Starting with
a11x1 +
a21x1 +
a12x2 + a13x3 + ... + a1nxn =
a22x2 + a23x3 + ... + a2nxn =
:
an1x1 + an2x2 + an3x3 + ... + annxn =
b1
b2
bn
Solve each equation for one variable:
x1 = [b1 – (a12x2 + a13x3 + ... +
a1n xn)]/a11
x2 = [b2 – (a21x1 + a23x3 + ... +
a2n xn)]/a22
x3 = [b3 – (a31x1 + a32x2 + ... + a3nxn)]/a33
:
xn = [bn – (an1x1 + an2x2 + ... + an,n-1xn-1)]/ann
Start with an initial estimate of {x}0,
substitute into the right-hand side of all of the above equations
generate a new approximation {x}1
This is a multivariate one-point iteration: {x}j+1 = { g({x}j) }
Repeat until maximum number of iterations is reached or:
x ji x j x ji
Matrix Derivation
To solve [A]{x} = {b}, separate [A] into: [A] = [Lo] + [D] + [Uo]
[D] = diagonal(aii)
[Lo] = lower triangular w/ zeros on diagonal
[Uo] = upper triangular w/ zeros on diagonal
Rewrite system:
( [Lo] + [D] + [Uo] ) {x}= {b}
Iterate
[D] {x}j+1 = {b} ( [Lo] + [Uo] ) {x}j
which is effectively:
{x}j+1 = [D]-1 ({b} ( [Lo] + [Uo] ) {x}j )
Iterations converge if:
|| [D] ([Lo] + [Uo] ) || < 1
(Sufficient condition is if the system is diagonally dominant)
page 3-22 of 3-26
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-23 of 3-26
This iterative method is called the Jacobi Method
Final form:
{x}j+1 = [D]-1( {c} – ( [Lo]+[Uo] ){x}j )
or, written out more fully:
a 2n x nj a11
a 2n x nj a 22
a 2n x nj a 33
x1j1 b1 a12 x 2j a13 x 3j
x 2j1 b2 a 21 x1j a 23 x 3j
x 3j1 b3 a 31 x1j a 32 x 2j
:
x nj1 bn a n1 x1j a n2 x 2j
a n,n 1 x nj 1 a nn
Note that, although the new estimate of x1 was known, we did not use it to calculate the new x2.
Iterative Solution Methods -- Gauss-Seidel (C&C 4th, 11.2, p. 289)
In most cases using the newest values on the right-hand side equations will provide better estimates of
the next value. If this is done, then we are using the Gauss-Seidel Method:
( [L0] + [D] ) {x}j+1 = {b} – [U0] {x}j
or explicitely:
x1j1 b1 a12 x 2j a13 x 3j
a 2n x nj a11
a 2n x nj a 22 F
a 2n x nj a 33
x 2j1 b 2 a 21 x1j+1 a 23 x 3j
x 3j1 b3 a 31 x1j+1 a 32 x 2j+1
:
x nj1 b n a n1 x1j+1 a n2 x 2j+1
j+1
a n,n 1 xn-1
a
nn
If either method converges,
Gauss-Seidel converges faster than Jacobi.
Why use Jacobi ?
Because you can separate the n-equations into n independent tasks;
it is very well suited to computers with parallel processors.
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-24 of 3-26
Convergence of Iterative Solution Methods (C&C 4th, 11.2.1, p. 291)
Rewrite given system:
[A]{x} = { [B] + [E] } {x} = {bb}
where [B] is diagonal, or triangular so we can solve
[B]{y} = {g} quickly. Thus,
[B] {x}j+1 = {b} – [E] {x}j
which is effectively
{x}j+1 = [B]-1 ({b} – [E] {x}j )
True solution {x}c satisfies
{x}c = [B]-1 ({b} – [E] {x}c )
Subtracting yields
{x}c – {x}j+1 = – [B]-1 [E] [ {x}c – {x}j ]
So
||{x}c – {x}j+1|| || [B]-1 [E] || ||{x}c – {x}j ||
Iterations converges linearly if || [B]-1 [E] || < 1
=> || ([D] + [Lo])-1 [Uo] || < 1
For Gauss-Seidel
=> || [D] -1 ([Lo] + [Uo]) || < 1
For Jacobi
Iterative methods will not converge for all systems of equations, nor for all possible rearrangements.
If the system is diagonally dominant, i.e. aii > aij where ij then
xi
ci a i1
a
a
x1 i2 x 2
in x n
a ii a ii
a ii
a ii
a ij
with all
< 1.0, i.e., small slopes.
a ii
A sufficient condition for convergence :
n
a ii a ij i.e., system is diagonally dominant
j1
ji
Notes: 1. If the above does not hold, still may converge
2. This looks similar to infinity norm of [A]
ENGRD 241 Lecture Notes
Section 3: Systems of Equations
page 3-25 of 3-26
Improving Rate of Convergence of Iterative Solution Schemes
(C&C 4th, 11.2.2, p. 294:
Relaxation Schemes:
xinew = λxitrial + (1- λ) xiold
where 0.0 < 2.0
• Underrelaxation ( 0.0 < < 1.0 )
More weight is placed on previous value.
Often used to:
– make nonconvergent system convergent
– expedite convergence by damping out oscillations
• Overrelaxation ( 1.0 < 2.0 )
More weight is placed on the new value.
Assume the new value is heading in the right direction, and hence pushes the new value closer to
the true solution.
The choice of is highly problem dependent and is empirical, so relaxation is usually only used for
often repeated calculations of a particular class.
Why Iterative Solutions?
You often need to solve A x = b where n = 1000's
• Description of a building or airframe,
• Finite-Difference approximation to PDE
Most of A's elements will be zero; for finite-difference approximations to Laplace equation have
five aij 0 in each row of A.
Direct method (Gaussian elimination)
• Requires n3/3 flops
(n = 5000; n3/3 = 4 x 1010 flops)
• Fills in many of n2-5n zero elements of A
Iterative methods (Jacobi or Gauss-Seidel)
• Never store A
(say n = 5000; don’t need to store 4n2 = 100 Megabyte)
• Only need to compute (A-B)x; and to solve Bx t+1 = b
• Effort:
Suppose B is diagonal, solving B v = b
n flops
Computing (A–B) x
For m iterations
4n flops
5mn flops
For n = m = 5000, 5mn = 1.25x108 At worst O(n2).
Other Iterative Methods (not covered in detail in this course)
For very sparse and very diagonally dominant systems, Jacobi or Gauss Seidel may be successful and
appropriate. However, the potential for very slow convergence for many practical engineering
simulations tends to favor other, more sophisticated iterative methods. For example, the conjugate
gradient method is guaranteed to converge in less than n iterations (if roundoff is negligible) and
the preconditioned conjugate gradient methods are even more rapidly convergent.