Project 3
advertisement

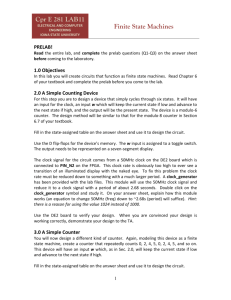
EE365: A Traffic Light Controller 11/30/2004 Chris Ouellette Joshua Smith I. Purpose The purpose of this project is to design a simple traffic light controller for a 4-way intersection of a North-South country road and an East-West heavily traveled highway. The principles guiding this design are described in the project specification, but key considerations are listed below: Pedestrians have priority over all vehicles traveling NS or EW. Pedestrians must not prevent traffic from flowing EW or NS if need be. East West is heavily traveled so these lights are usually green. Remains green 6-7 clock cycles before changing to red for NS cars or pedestrian travel. This project will require the user of combinational and sequential logic components. State diagrams will be used in conjunction with behavioral code in ModelSim to develop the sequential logic. The end result of this project will be a design in ModelSim which we will be able to target to a XC9500 series CPLD using Xilinx ISE WebPack. Note: The timing diagrams used in this report are in nanosecond units. State transitions are considered in the scale of cycles (for example, EW is green 6-7 cycles before going to NS). Therefore, do not literally interpret the nanosecond time-scale, but the relative magnitudes of waiting periods—a multiplier on the waiting period could easily increase the actual waiting period of various traffic states. II. Design and Testing Plan The design and testing process of this project will be carried out in a series of steps where the design of each step will be individually tested before being integrated into the next higher level entity. The major steps are as follows: 1. Develop a general high-level design that will use the inputs of a car’s presence in the NS lane, or a pedestrian wishing to walk, that will control the flow of traffic. This high level design will consist of two state machines (outlined in a later section): a counter and a “traffic-state” machine. 2. Develop a state diagram for the traffic-state component, model the design using behavioral language in ModelSim and test the design using inputs that are representative of possible traffic state changes. 3. Develop a state diagram for the counter component, model the design using behavioral language in ModelSim and test the design using inputs that are representative of possible needed counting patterns. 4. Integrate the two components together using structural language (component instantiation) in ModelSim. This will be the final proposed design. Test this design using the NS car and pedestrian inputs for various cases. 5. If the final design works as expected, import the ModelSim project into Xilinx ISE and iteratively attempt to fit the design to increasingly large XC9500 series CPLDs, until the design fits. Analyze the fitter report. Each of these steps will be conducted in the sections that follow. III. High-Level Traffic Controller Design The traffic light controller for the specification given will require two major components: a state machine to keep track of the current state of the traffic, and the next state that the traffic should enter into, and a counter which will control when the transitions from one traffic state to another occurs. These will be designed as two separate entities and then combined into one entity after tested. The final proposed design is shown below: Figure 1 - High Level Traffic Controller Design In this design we can see the two entities. Both entities have inputs P (presence of a pedestrian), C (presence of a NS car), and CLK. The traffic-state machine has an input T which goes high when the traffic state needs to transition to the next appropriate state. Thus, when a pedestrian decides to press the walk button, the current state will continue for its set number of cycles (determined by W_STATE and the counter). When the counter reaches the appropriate count for the current state, T goes high which signals the state machine to transition to the pedestrian state. The output of the traffic light controller as a whole is “lightstate” which is simply the current state of the traffic state machine. Assumptions of the Traffic Controller’s Design: A few assumptions have been made that significantly impact the design of the traffic controller. There assumptions are listed below: Inputs P and C have already been synchronized with CLOCK of the traffic controller—that is, we do not need to worry about a pedestrian pressing the “walk” button on the rising clock edge, or a NS car triggering C at that time. Inputs P and C stay high until the “request” has been fulfilled. For example, if a pedestrian pushes the walk button, the input P will go high and remain high until all the pedestrian requests at the time have been fulfilled (which means no one presses the button again within the pedestrian walking cycle). This also means the “pulsing” of the pedestrian pushing a button has already been taken care of, external to the circuit. It is possible for P or C to go low during their respective states (PED1 or PED2 and NS), but by the assumption above it is not possible for a pedestrian (for example) to be “served” and thus to have the P input go low during any other state (say EW or NS). The purpose of the design is a controller—that is, it will be connected to other logic networks (such as decoders) which will interpret the output traffic state (lightstate) and operate the traffic lights accordingly. IV. Traffic State Machine Design: The state machine will consist of 5 states. First is the INIT state (000) which represents a fail safe were all the lights will go red including walking lights if a undesirable state is reached. The next state is EW (001) which represents a green light in the East/West direction, allowing traffic to flow. The third state is the NS (010) state, which is the green light in the North/South direction. This means that the traffic may flow North/South. Next is PED1 (011) state. This state represents a pedestrian has pushed the walk button during an East/West traffic flow. Possible states after this may be either NS or EW. The final state is PED2. This state occurs when a pedestrian wishes to cross during North/South flow. This state forces East/West flow after the pedestrian is allowed to cross. This is a measure to keep the traffic flowing in all directions. The state names and logic value assignments are summarized in the table below. State Name INIT EW NS PED1 PED2 Logic Value 000 001 010 011 100 Table 1 - State names and logic levels As stated in Section III the traffic state machine has three inputs, T, P, C. These inputs tell the machine which state to go to next. Since the output of the traffic-state machine corresponds directly to the current state, this is a Moore machine design. Below is a diagram showing under what circumstances each state can be reached. Note that only transitions for which the input T is high is shown: this is because all transitions for which T is low just loop back on the current state. In the traffic-state’s implementation this simply means that the counter has not yet counted up to the transition time and the state does not need to switch. Figure 2 - Traffic State Diagram Note: This has not been drawn in a typical “state-diagram” way in sake of clarity. Arrows drawn to states that are named the same means it is looping back on the state, not to a different state. As an example, if the current state of traffic is flowing in the East/West (EW) direction and a car shows up in the north/south lane (input of TPC=101), the state machine will transition during the next clock cycle from EW to NS after the count has elapsed and T has gone high. Once in the NS state if a pedestrian shows up (110) then again when T goes high the state machine will transition to the PED2 state. Modeling: The traffic state machine will be modeled using behavioral language in ModelSim. While the Quine McClusky algorithm could be used to generate reduced logic networks and the design modeled using dataflow, in the interest of time behavioral was chosen. This choice will be assessed when the design is synthesized. Behavioral language was used in ModelSim by using the case statement. By creating a new data type that could store the variable names that we are using (INIT, EW, etc.), we directly translated the state table into ModelSim, coding all of the next states for each current state. Using Table 1 to directly assign logic values to different states (since this is a Moore-based design), the output of the traffic-state machine was made. Not shown in Figure 2 are some extra “safety features” for the traffic-state machine. The INIT state has been coded as the initially state that the network will start in. This is an “all stop” state. This state cannot normally be reached again after it first goes to EW, under normal operation. However, if the machine reaches an unknown state it will automatically reset back to the INIT state. Test Strategy: Testing of this design will be conducted on two levels. The “low-level” test will involve generating a sequence of likely inputs (pedestrians and cars) coming to the intersection and determining the correct sequence of states based on the state diagram proposed in Figure 2. The results of the expected output will then be compared to that of a timing diagram generated in ModelSim. “High-level” test will be a conceptual check to verify that traffic and pedestrians are getting the correct traffic flow based on the specification given for the design. Test and Verification: The table below is a list of inputs to be tested, and their expected outputs. These can be determined by tracing Figure 2 starting from the INIT state. T 1 1 1 1 1 1 0 1 1 1 P 0 0 1 1 0 1 1 1 1 1 C 0 1 0 0 0 1 1 1 1 1 Curr. State INIT EW NS PED2 EW EW PED1 PED1 NS PED2 Next State EW NS PED2 EW EW PED1 PED1 NS PED2 EW Table 2 - Traffic State Expected Outputs Constructing a TestBench with these inputs we obtain the following timing diagram: Figure 3 - Traffic-state timing diagram First note that this testbench was constructed such that the inputs T, P, and C change on the negative clock edge and the output changes on the positive clock edge. So in regions for the same input there are two different outputs (states). These represent the current state and next state, respectively. By changing the input at the negative clock edge, sufficient time could be given to the input to setup before the rising clock edge (if timing considerations were made). We can see that there is a 1-1 correspondence between the timing diagram and the expected state table. On a low-level basis we can conclude that the design is functioning correctly. On a high-level basis, there are a few interesting portions of Figure 3 to consider. First is the importance of the PED2 state. This shows up twice in the timing diagram, at CASE 4 and 10. In case 4, PED2 was not needed since there was no car wanting to go in the NS direction again. However, in CASE 10, the PED2 state prevented the traffic state from going back to the NS direction after it has just been in the NS state, even though C was high. Other interesting occurrences are when EW is held along CASE 5 and 6 because neither P nor C was asserted. Finally in cases 7 and 8 PED1 is held while T is low. This will be very important later because as the counter is counting, T is zero, until T=1 and the traffic-state transitions. Considering all of this, we believe that the traffic-state machine is working correctly in controlling which state should be asserted based on inputs and the value of T. V. Counter Design: The counter consists of a series of states which represent a delay before T is output high to signal a traffic-state transition. The amount of delay (number of states the counter passes through before T goes high) is primarily a function of state, with one exception where the inputs P and C are needed. The states PED1, PED2, and NS all have a pre-defined delay time; that is, once entering these states the delay time is 3 cycles, 3 cycles, and 4 cycles respectively. The exception occurs because EW can occur indefinitely if P or C never go high. However, if P or C goes high, then the output T goes high after 6-7 clock cycles. This design needs to be a Mealy-based state machine since the output is based on both the inputs to the circuit and the current state of the network. That is, for a given state of the counter the output is not always the same. The output is based on the current state of the counter and the input state (the state of the traffic-state machine). The state diagram which summarizes the transitions which are possible is shown below. Instead of using variables to represent the states (such as INIT and EW in the traffic-state design) counts are directly coded as binary numbers (1 = 0012, 2=0102, etc.). Figure 4 - Counter State Diagram Modeling: The counter was modeled similar to the traffic-state machine using behavioral language in ModelSim. However, instead of using a new datatype to describe the states, they were directly coded with binary numbers. The same style case statements were used to describe the state transitions that occur on the positive clock edge. Extra safety has been included in this design by creating a “loopbacks” to the zero count, with an output of zero if the input state to the counter is impossible for the current count that it is on (for example, an input state of 010—NS, when the current count is 101—5, the NS count should have already looped back). By looping back to zero, this will give the system’s traffic state a longer time to resolve an “undetermined” state. Test Strategy: In order to test the counter design, we have decided to test only a limited number of cases and test to see whether the design a) counts correctly, and b) sends the output T high at the correct times. To do this, we will choose a couple states to test the counting sequence on, determine the expected output using the state diagram, and compare this to the output from a ModelSim testbench. Test and Verification: First we will test to verify that the counter will leave the INIT state after 1 clock cycle, hold the EW state as long as P and C are low, and count to 6-7 cycles when either one goes high. The test for this is shown in the following timing diagram: Figure 5 - Traffic Light Counter Timing Diagram, Example 1 Figure 5 shows a very simple example of the traffic light counter in action. Initialized in the 000 state, the counter shows an output of T=1. This means that as soon as the system is turned on, all lights are red for 1 cycle, and on the next cycle they will make their first transition based on the system’s inputs. At t=10ns, a state of EW is shown. Since neither P nor C are high from 10-30ns, the count remains at zero. At time of t=30ns, P transitions high signaling a pedestrian wishes to cross the intersection. From the next positive clock edge, the counter begins to count up to 6 clock cycles where T goes high, signaling a transition to the next traffic state. This shows that the counter correctly counted 6.5 clock cycles from the time P went high to the end of T’s high level/positive clock edge (at t=95ns). This has verified with our expected outcome. Next we will verify counting in the NS state (010) and the PED1 state (011). When in the NS state, the count should reach 3 and T should go high (4 clock cycles), and in the PED1 state T should go high at two (3 clock cycles). Consider the timing diagram below: Figure 6 - Traffic Light Counter Timing Diagram, Example 2 In Figure 6 we can see that after the input C goes high at 10ns, 3.5 clock cycles elapse to the time when there is a positive clock edge, and the negative edge of T high (45ns). This is not a complete 4 cycles because only half of zero was counted as one of the counts. Similarly, in PED1 state (011) there are 2.5 clock cycles from 50ns to 75ns. Half a clock cycle was eliminated because only half of the zero state was considered. Neither of these “half cycles” will negatively impact the final controller design because the inputs are changing with a half cycle difference to the clock, so this difference can be expected in some situations. We feel that a safe counting sequence can be maintained as seen above. With the counting sequence verified for a few representative instances, we believe that the counting mechanism works correctly to delay the traffic-state transitions appropriately based on the current traffic-state, and presence of a pedestrian or car. VI. Traffic Controller Design: The upper-level design for the traffic controller was proposed in Section III. The assumptions stated in that section, in addition to the guiding principles to consider in the purpose section, have been used to develop the logic network thus far. Now the counter, which keeps track of how long the traffic should remain on a certain state; and the state controller itself, will be integrated together in a feedback loop. The resulting circuit will be a “closed box” with inputs of a NS car presence or pedestrian and output of current traffic state (Figure 1). Modeling: Since the design of the counter and traffic-state machines have already been individually built and tested, to construct the final traffic controller, they just need to be wired together inside a higher level entity using structural language in ModelSim. Again, one can see the way that they are wired together in Figure 1. Test Strategy: The test strategy for the overall controller will be similar to that of the traffic-state machine, but instead of verifying only that the machine transitions to the correct state to let traffic flow as needed, consideration needs to be given to the amount of time that the controller lets traffic flow in a given direction. Therefore by comparing the sequence of states that traffic controller goes through and observing the time spent in each state we can determine whether the controller is function as expected. Since there are two state diagrams associated with this process, a narrative of inputs and expected traffic states/counting sequences will be used as a point of comparison to the timing diagram. There are numerous cases for the design (because of the possible sequences EW PED NS, EW NS PED, etc), but we will consider a few cases and attempt to apply them to all cases. We will be able to feel confident in the general application of the results because each component was individually tested before being used in the higher level design. Test and Verification: In the following test, we will start the traffic light controller with initial P and C values not asserted (EW state, holding). After some time a pedestrian will come and P will become asserted (EW state, counting). Pedestrians will have a change to cross after 6-7 clock cycles (PED1), P will drop to zero, and the next state will be EW (holding). Some later time C will go high (EW, counting) and then the NS car will be served (NS state), C will drop, and after a total of 4 clock cycles EW will occur again. Consider the following timing diagram to compare the narrative input to the logic levels: Figure 7 - Traffic Light Controller Timing Diagram, Example 1 In this figure we can see that what we would expect to occur, according to the narrative, is what occurs in the timing diagram. A few important features to point out: first, transitions in state occur at the negative edge of T’s pulse and at the positive clock edge; second, when in the NS state (010) C went low in the middle of the state (which can be interpreted as all cars passed through) and the state still correctly transitions at the right time. That is, only in the EW state when P and C are zero does the count “hold” because the states NS and PED1/2 have time constraints whereas EW is only limited to 6-7 cycles when P or C is asserted. The following example continues where the last example left off: in the EW state (holding). Simultaneously P and C go high meaning EW begins counting. After 6-7 cycles, since pedestrians have priority over cars the PED1 state should occur. After 3 cycles, all pedestrians served, P goes low, but C remains high (as it will remain high through the rest of this example); now the controller should be in NS state. After NS state’s 4 cycles, we should again enter the EW state, but counting immediately for 6-7 cycles (because C is still high). We then enter the NS state again, but during the NS state P goes high. Since pedestrians have priority over vehicles, we should enter the PED2 state. During the PED2 state, all pedestrians served, P goes low. After 3 cycles, regardless of C still being high (possibly because of heavy traffic), EW needs to be served (which should immediately begin counting) so that EW traffic is not held up by NS traffic. Consider the following timing diagram which represents this narrative’s inputs: Figure 8 - Traffic Light Controller Timing Diagram, Example 2 Reviewing the narrative above and Figure 8 we can see that the timing diagram corresponds to the narrative. The important controller pattern to reiterate here is the progression from EW -> NS -> PED2 -> EW even when C is asserted because EW traffic flow takes precedence over NS flow if NS has been served since EW was last served. Seeing that the progression of states and number of cycles spent in each state meets the expected outputs, which were developed to test whether or not the controller meets the specifications originally set for the design, we believe that the logic controller produced is accurate and complete. VII. Synthesis and Fit Synthesis and Fitting of the traffic controller ran into difficulties. After importing the project into Xilinx ISE and attempting to run “Synthesize – XST,” targeting even the largest XC9500 series CPLD yielded the following errors: WARNING:Xst:524 - All outputs of the instance <traffic_state> of the block <traffic_sm_behavioral> are unconnected in block <traffic_controller>. WARNING:Xst:524 - All outputs of the instance <traffic_counter> of the block <counter_sm_behavioral> are unconnected in block <traffic_controller>. We have checked and re-checked all connections in the instantiation statements to verify that all outputs and inputs are properly connected—the fact that the design tested out on multiple levels in ModelSim also pointed to the fact that they are wired correctly. Continuing to attempt to Fit, in the process of translate an error occurred which prevented us from proceeding any further: ERROR:NgdBuild:605 - logical root block 'traffic_controller' with type 'traffic_controller' is unexpanded. Symbol 'traffic_controller' is not supported in target 'xc9500'. Investigating this, we attempted to fit both individual entities (counter and traffic-state) to CPLDs. This was successful—they both successfully fit on the XC9536-5pc44. The summaries of each of these fit processes are attached. VIII. Conclusions In this project we developed a traffic light controller based on given specifications. We chose to address the controller as a two part design. One part controlled the traffic state transitions, and the other controlled the length of time that each state would be asserted. Each part was addressed separately by creating a state diagram, and assigning values to variables. State machines were then directly converted into a case structure using behavioral language in ModelSim. Each of the components were individually tested by comparing expected results to results obtained from a testbench. Finally the components were integrated using structural language and tested again against predicted results with a testbench. After a the proposed design was discovered to be accurate, we attempted to target a XC9500 series CPLD using Xilinx ISE WebPack. The process of synthesis failed for the higher level entity, but fit correctly for the lower level entities. Space was not the issue here as it was not able to successfully complete synthesis and translate first. Had the fit process worked for the design, we believe that it would have fit well on the XC9536-5pc44. This is based on looking at the space (macrocells/function blocks, registers, and pins) that the counter and traffic-state components took individually. cpldfit: version G.37 Fitter Report Design Name: traffic_sm_behavioral Device Used: XC9536-5-PC44 Fitting Status: Successful Xilinx Inc. Date: 11-29-2004, 10:35PM **************************** Resource Summary **************************** Macrocells Product Terms Registers Pins Function Block Used Used Used Used Inputs Used 6 /36 ( 17%) 15 /180 ( 8%) 3 /36 ( 8%) 7 /34 ( 21%) 9 /72 ( 12%) PIN RESOURCES: Signal Type Required Mapped | Pin Type Used Remaining ------------------------------------|--------------------------------------Input : 3 3 | I/O : 6 22 Output : 3 3 | GCK/IO : 1 2 Bidirectional : 0 0 | GTS/IO : 0 2 GCK : 1 1 | GSR/IO : 0 1 GTS : 0 0 | GSR : 0 0 | ------Total 7 7 MACROCELL RESOURCES: Total Macrocells Available 36 Registered Macrocells 3 Non-registered Macrocell driving I/O 3 GLOBAL RESOURCES: Signal 'CLOCK' mapped onto global clock net GCK1. Global output enable net(s) unused. Global set/reset net(s) unused. POWER DATA: There are 6 macrocells in high performance mode (MCHP). There are 0 macrocells in low power mode (MCLP). There are a total of 6 macrocells used (MC). End of Resource Summary cpldfit: version G.37 Xilinx Inc. Fitter Report Design Name: counter_sm_behavioral Date: 11-29-2004, 10:35PM Device Used: XC9536-5-PC44 Fitting Status: Successful **************************** Resource Summary **************************** Macrocells Product Terms Registers Pins Function Block Used Used Used Used Inputs Used 4 /36 ( 11%) 20 /180 ( 11%) 3 /36 ( 8%) 7 /34 ( 21%) 8 /72 ( 11%) PIN RESOURCES: Signal Type Required Mapped | Pin Type Used Remaining ------------------------------------|--------------------------------------Input : 5 5 | I/O : 6 22 Output : 1 1 | GCK/IO : 1 2 Bidirectional : 0 0 | GTS/IO : 0 2 GCK : 1 1 | GSR/IO : 0 1 GTS : 0 0 | GSR : 0 0 | ------Total 7 7 MACROCELL RESOURCES: Total Macrocells Available 36 Registered Macrocells 3 Non-registered Macrocell driving I/O 1 GLOBAL RESOURCES: Signal 'CLOCK' mapped onto global clock net GCK1. Global output enable net(s) unused. Global set/reset net(s) unused. POWER DATA: There are 4 macrocells in high performance mode (MCHP). There are 0 macrocells in low power mode (MCLP). There are a total of 4 macrocells used (MC). End of Resource Summary COUNTER ENTITY VHDL CODE LIBRARY IEEE; USE IEEE.std_logic_1164.all; ENTITY counter_sm_behavioral IS PORT ( CLOCK : IN std_logic; state : IN std_logic_vector( 2 DOWNTO 0 ) ; P : IN std_logic; C : IN std_logic; T : OUT std_logic ); END counter_sm_behavioral ; ARCHITECTURE counter_sm_behavioral_arch OF counter_sm_behavioral IS signal count : std_logic_vector(2 downto 0) := "000"; signal countstate : std_logic_vector(5 downto 0); signal countzstate : std_logic_vector(6 downto 0); signal Z : std_logic; begin Z <= P OR C; countzstate <= count&Z&state; countstate <= count&state; process (CLOCK) begin if CLOCK'event and CLOCK = '1' then case count is when "000" => if state="001" and Z='0' then count <="000"; elsif state="000" then count<="000"; elsif state="001" then count<="001"; elsif state="010" then count<="001"; elsif state="011" then count<="001"; elsif state="100" then count<="001"; else count<="000"; end if; when "001" => if state="000" then count<="000"; -- if get a state in a counting state where that input state shouldnt be possible, continue counting to max clock cycles for safety. elsif state="001" then count<="010"; elsif state="010" then count<="010"; elsif state="011" then count<="010"; elsif state="100" then count<="010"; else count<="000"; end if; when "010" => if state="000" then count<="000"; elsif state="001" then count<="011"; elsif state="010" then count<="011"; elsif state="011" then count<="000"; elsif state="100" then count<="000"; else count<="000"; end if; when "011" => if state="000" then count<="000"; elsif state="001" then count<="100"; elsif state="010" then count<="000"; elsif state="011" then count<="000"; elsif state="100" then count<="000"; else count<="000"; end if; when "100" => if state="000" then count<="000"; elsif state="001" then count<="101"; elsif state="010" then count<="000"; elsif state="011" then count<="000"; elsif state="100" then count<="000"; else count<="000"; end if; when "101" => if state="000" then count<="000"; elsif state="001" then count<="110"; elsif state="010" then count<="000"; elsif state="011" then count<="000"; elsif state="100" then count<="000"; else count<="000"; end if; when "110" => if state="000" then count<="000"; elsif state="001" then count<="000"; elsif state="010" then count<="000"; elsif state="011" then count<="000"; elsif state="100" then count<="000"; else count<="000"; end if; when others => count <= "000"; end case; end if; end process; process (countstate, countzstate) begin if countstate="010011" or countstate="010100" or countstate="011010" or countstate="000000" or countzstate="1101001" then T<='1'; else T<= '0'; end if; end process; END counter_sm_behavioral_arch; TRAFFIC-STATE VHDL CODE LIBRARY IEEE; USE IEEE.std_logic_1164.all; ENTITY traffic_sm_behavioral IS PORT ( CLOCK : IN std_logic ; P : IN std_logic ; C : IN std_logic ; T : IN std_logic ; Q : OUT std_logic_vector( 2 DOWNTO 0 ) ); END traffic_sm_behavioral ; ARCHITECTURE traffic_sm_behavioral_arch OF traffic_sm_behavioral IS type state_def is (INIT, EW, NS, PED1, PED2, PED3); signal state: state_def:=INIT; SIGNAL X : std_logic_vector(2 downto 0); begin X <= T & P & C; process (CLOCK) begin if CLOCK'event and CLOCK = '1' then case state is when INIT => if X="100" then state <= EW; elsif X="101" then state <= NS; elsif X="110" then state <= PED1; elsif X="111" then state <= PED1; else state <= INIT; end if; when EW => if X="100" then state <= EW; elsif X="101" then state <= NS; elsif X="110" then state <= PED1; elsif X="111" then state <= PED1; else state <= EW; end if; when NS => if X="100" then state <= EW; elsif X="101" then state <= EW; elsif X="110" then state <= PED2; elsif X="111" then state <= PED2; else state <= NS; end if; when PED1 => if X="100" then state <= EW; elsif X="101" then state <= NS; elsif X="110" then state <= EW; elsif X="111" then state <= NS; else state <= PED1; end if; when PED2 => if X="100" then state <= EW; elsif X="101" then state <= EW; elsif X="110" then state <= EW; elsif X="111" then state <= EW; else state <= PED2; end if; when others => state <= INIT; end case; end if; end process; with state select Q <= "000" when INIT, "001" when EW, "010" when NS, "011" when PED1, "100" when PED2, "000" when others; END traffic_sm_behavioral_arch; TRAFFIC CONTROLLER VHDL CODE LIBRARY IEEE; USE IEEE.std_logic_1164.all; ENTITY traffic_controller IS PORT ( P : IN std_logic ; C : IN std_logic ; CLK : IN std_logic ); END traffic_controller ; ARCHITECTURE traffic_controller_arch OF traffic_controller IS COMPONENT traffic_sm_behavioral PORT ( CLOCK : IN std_logic ; P : IN std_logic ; C : IN std_logic ; T : IN std_logic ; Q : OUT std_logic_vector( 2 DOWNTO 0 ) ); END COMPONENT ; COMPONENT counter_sm_behavioral PORT ( CLOCK : IN std_logic; state : IN std_logic_vector( 2 DOWNTO 0 ) ; P : IN std_logic; C : IN std_logic; T : OUT std_logic ); END COMPONENT ; SIGNAL W_T : std_logic ; SIGNAL W_STATE : std_logic_vector(2 downto 0) ; BEGIN traffic_state : traffic_sm_behavioral PORT MAP (CLOCK=>CLK, P=>P, C=>C, T=>W_T, Q=>W_STATE); traffic_counter : counter_sm_behavioral PORT MAP (CLOCK=>CLK, P=>P, C=>C, T=>W_T, state=>W_STATE); END traffic_controller_arch; COUNTER TESTBENCH library IEEE; use IEEE.std_logic_1164.all; entity TB_COUNTER_SM_BEHAVIORAL is end TB_COUNTER_SM_BEHAVIORAL; architecture BEH of TB_COUNTER_SM_BEHAVIORAL is component COUNTER_SM_BEHAVIORAL port(CLOCK : IN std_logic ; STATE : IN std_logic_vector ( 2 DOWNTO 0 ); P : IN std_logic ; C : IN std_logic ; T : OUT std_logic ); end component; constant PERIOD : time := 10 ns; signal W_CLOCK : std_logic := '0'; signal W_STATE : std_logic_vector ( 2 DOWNTO 0 ); signal W_P : std_logic ; signal W_C : std_logic ; signal W_T : std_logic ; begin DUT : COUNTER_SM_BEHAVIORAL port map(CLOCK => W_CLOCK, STATE => W_STATE, P => W_P, C => W_C, T => W_T); W_CLOCK <= not W_CLOCK after PERIOD/2; STIMULI : process begin W_STATE <= "000"; W_P <= '0'; W_C <= '0'; wait for PERIOD*1; W_STATE <= "010"; W_P <= '1'; W_C <= '0'; wait for PERIOD*4; W_STATE <= "011"; W_P <= '0'; W_C <= '1'; wait for PERIOD*5; wait; end process STIMULI; end BEH; configuration CFG_TB_COUNTER_SM_BEHAVIORAL of TB_COUNTER_SM_BEHAVIORAL is for BEH end for; end CFG_TB_COUNTER_SM_BEHAVIORAL; TRAFFIC-STATE TESTBENCH library IEEE; use IEEE.std_logic_1164.all; entity TB_TRAFFIC_SM_BEHAVIORAL is end TB_TRAFFIC_SM_BEHAVIORAL; architecture BEH of TB_TRAFFIC_SM_BEHAVIORAL is component TRAFFIC_SM_BEHAVIORAL port(CLOCK : IN std_logic ; P : IN std_logic ; C : IN std_logic ; T : IN std_logic ; Q : OUT std_logic_vector ( 2 DOWNTO 0 ) ); end component; constant PERIOD : time := 10 ns; signal W_CLOCK : std_logic := '0'; signal W_P : std_logic ; signal W_C : std_logic ; signal W_T : std_logic ; signal W_Q : std_logic_vector ( 2 DOWNTO 0 ) ; begin DUT : TRAFFIC_SM_BEHAVIORAL port map(CLOCK => W_CLOCK, P => W_P, C => W_C, T => W_T, Q => W_Q); W_CLOCK <= not W_CLOCK after PERIOD/2; STIMULI : process begin W_P <= '0'; W_C <= '0'; W_T <= '1'; wait for PERIOD; W_P <= '0'; W_C <= '1'; W_T <= '1'; wait for PERIOD; W_P <= '1'; W_C <= '0'; W_T <= '1'; wait for PERIOD; W_P <= '1'; W_C <= '0'; W_T <= '1'; wait for PERIOD; W_P <= '0'; W_C <= '0'; W_T <= '1'; wait for PERIOD; W_P <= '1'; W_C <= '1'; W_T <= '1'; wait for PERIOD; W_P <= '1'; W_C <= '1'; W_T <= '0'; wait for PERIOD; wait; end process STIMULI; end BEH; configuration CFG_TB_TRAFFIC_SM_BEHAVIORAL of TB_TRAFFIC_SM_BEHAVIORAL is for BEH end for; end CFG_TB_TRAFFIC_SM_BEHAVIORAL; TRAFFIC-CONTROLLER TESTBENCH library IEEE; use IEEE.std_logic_1164.all; entity TB_TRAFFIC_CONTROLLER is end TB_TRAFFIC_CONTROLLER; architecture BEH of TB_TRAFFIC_CONTROLLER is component TRAFFIC_CONTROLLER port(P : IN std_logic ; C : IN std_logic ; CLK : IN std_logic ); end component; constant PERIOD : time := 10 ns; signal W_P : std_logic ; signal W_C : std_logic ; signal W_CLK : std_logic := '0'; begin DUT : TRAFFIC_CONTROLLER port map(P => W_P, C => W_C, CLK => W_CLK); W_CLK <= not W_CLK after PERIOD/2; STIMULI : process begin W_P <= '0'; W_C <= '0'; wait for PERIOD*3; W_P <= '1'; W_C <= '0'; wait for PERIOD*10; W_P <= '0'; W_C <= '0'; wait for PERIOD*3; W_P <= '0'; W_C <= '1'; wait for PERIOD*7; W_P <= '0'; W_C <= '1'; wait for PERIOD; W_P <= '0'; W_C <= '0'; wait for PERIOD*3; W_P <= '0'; W_C <= '0'; wait for PERIOD*3; W_P <= '1'; W_C <= '1'; wait for PERIOD*10; W_P <= '0'; W_C <= '1'; wait for PERIOD*11; W_P <= '1'; W_C <= '1'; wait for PERIOD*4; W_P <= '0'; W_C <= '1'; wait for PERIOD*7; W_P <= '0'; W_C <= '0'; wait for PERIOD*2; W_P <= '0'; W_C <= '1'; wait for PERIOD*7; W_P <= '1'; W_C <= '1'; wait for PERIOD*4; W_P <= '1'; W_C <= '0'; wait for PERIOD*3; W_P <= '0'; W_C <= '0'; wait for PERIOD*2; wait; end process STIMULI; end BEH; configuration CFG_TB_TRAFFIC_CONTROLLER of TB_TRAFFIC_CONTROLLER is for BEH end for; end CFG_TB_TRAFFIC_CONTROLLER; Joshua Smith and Chris Ouellette – BCD Adder Subtractor Xilinx Fit Report cpldfit: version G.37 Fitter Report Design Name: twodigitbcdto7seg Device Used: XC9572-7-PC44 Fitting Status: Successful Xilinx Inc. Date: 11-29-2004, 12:05PM **************************** Resource Summary **************************** Macrocells Product Terms Registers Pins Function Block Used Used Used Used Inputs Used 66 /72 ( 92%) 219 /360 ( 61%) 0 /72 ( 0%) 34 /34 (100%) 92 /144 ( 64%) PIN RESOURCES: Signal Type Required Mapped | Pin Type Used Remaining ------------------------------------|--------------------------------------Input : 17 17 | I/O : 28 0 Output : 17 17 | GCK/IO : 3 0 Bidirectional : 0 0 | GTS/IO : 2 0 GCK : 0 0 | GSR/IO : 1 0 GTS : 0 0 | GSR : 0 0 | ------Total 34 34 MACROCELL RESOURCES: Total Macrocells Available 72 Registered Macrocells 0 Non-registered Macrocell driving I/O 17 GLOBAL RESOURCES: Global clock net(s) unused. Global output enable net(s) unused. Global set/reset net(s) unused. POWER DATA: There are 66 macrocells in high performance mode (MCHP). There are 0 macrocells in low power mode (MCLP). There are a total of 66 macrocells used (MC). End of Resource Summary